Изобретение относится к трансмиссиям и ходовых системам транспортных средств, преимущественно одно- и более осных малогабаритных тракторов и самоходных тележек, которые предназначены в качестве средств малой механизации для обработки малогабаритных участков полей, уборки тротуаров и помещений внутри зданий и должны иметь хорошую поворачиваемость и тягово-сцепные показатели при относительно малых габаритах, весе и стоимости.
Известны мотоблоки и малогабаритные тракторы, включающие ведущий мост с межколесным дифференциалом и главной передачей. Поворот одноосных мотоблоков, как правило, осуществляют, воздействуя через рукоятки управления на мост, что приводит к срабатыванию межколесного дифференциала. Малогабаритные тракторы, как правило, выполняют с сочлененной ходовой системой При управлении такими средствами малой механизации требуется прилагать достаточно большие усилия, и водитель при работе с ними устает. Для облегчения условий его работы следует применять управляемые ведущие мосты.
Известны управляемые ведущие мосты транспортных средств, содержащие рулевое устройство с рулевой трапецией, тягами и цапфами, главную передачу, выполненную в виде ведущей и ведомой конических шестерен, из которых ведомая соединена с корпусом дифференциала, включающего сателлиты, также соединенные с корпусом, и полуосевые шестерни, соединенные карданными шарнирами с входными звеньями
1 Јь
GJ Ю О СО
бортовых планетарных редукторов, включающих также выходные звенья, связанные с ведущими колесами, и опорные звенья, связанные с рамой.
По схеме с коническим межколесным дифференциалом, карданными шарнирами и бортовыми планетарными редукторами выполнены управляемые ведущие мосты автомобилей, а также многих тракторов.
Недостатком такого управляемого ведущего моста являются большие габариты и масса, а также связанная с большим числом деталей сложность. Если управляемый ведущий мост работает с тяговой нагрузкой на поверхности, имеющей разные сцепные свойства, то межколесный дифференциал приходится блокировать. Если даже буксование колес при этом разное, то для поддержания прямолинейности движения приходится поворачивать колеса, двигаясь с боковым уводом и повышенными потерями, что приводит к снижению тягово-сцеп- ных показателей.
Цель изобретения - повышение эффективности работы за счет повышения тягово- сцепных показателей.
Эта цель достигается тем, что у управляемого ведущего моста транспортного средства, имеющего рулевой механизм, главную передачу, выполненную в виде ведущей и ведомой конических шестерен, кинематически связанную через редуктор, включающий паразитные шестерни и полуосевые шестерни с бортовыми редукторами, каждый из которых выполнен с входными звеньями, с выходными звеньями, связанными с ведущими колесами и с опорными звеньями, бортовые редукторы выполнены волновыми, входные звенья которых выполнены эксцентриковыми валами и соединены с ведомой конической шестерней главной передачи, а их опорные звенья - с полуосевыми шестернями редуктора, а одна из паразитных шестерен - с рулевым механизмом,причем главная передача размещена внутри редуктора, а ведущая шестерня и паразитные шестерни выполнены соосными. Управляемый ведущий мост проще, чем известный, так как он не включает карданных валов, шарниров, рулевой трапеции и рулевого механизма, а также шкворневого устройства. Ведущая шестерня главной передачи соединена валом с силовым агрегатом. Повышение тяго- во-сцепных показателей достигается при этом благодаря тому, что при буксовании одного из колес водитель, поворачивая руль, ускоряя при этом скорость вращения буксующего и замедляя скорость не буксующего колес, предотвращает отклонение
траектории движения от заданной. При этом колеса моста катятся без бокового увода с высокими тягово-сцепными показателями, а механизм блокировки колес не
требуется.
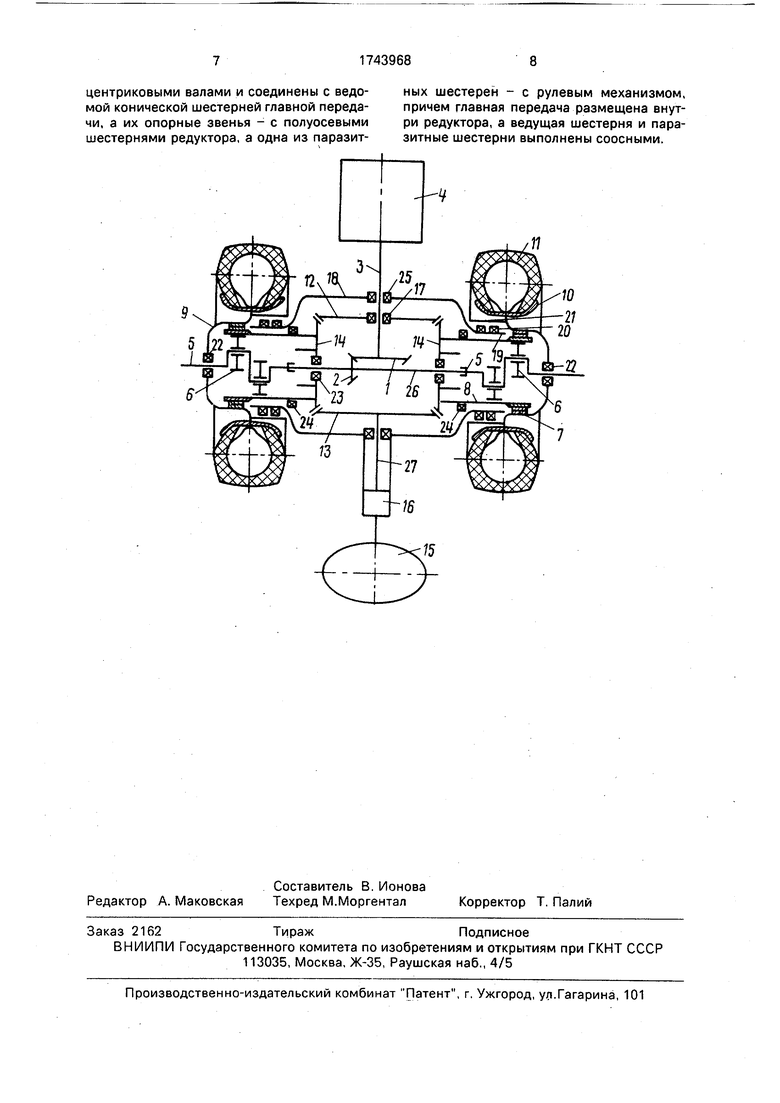
На чертеже изображена кинематическая схема управляемого ведущего моста.
Управляемый ведущий мост состоит из редуктора, бортовых редукторов и главной
передачи. Последняя выполнена в виде ведущей 1 и ведомой 2 конических шестерен. Ведущая шестерня 1 посредством вала 3 связана с двигателем 4 транспортного средства. Кроме того, в предложенном мосту
вместо бортовых планетарных редукторов применены более легкие волновые.
Бортовые волновые редукторы содержат входные звенья, выполненные в виде эксцентриков 5 с дисками б генераторов
волн, выходные звенья, выполненные в виде жестких колес с внутренними зубьями 7, а также опорные звенья, выполненные в виде соосных с генераторами волн гибких колес 8 с двумя зубчатыми венцами на
противоположных краях. Жесткие колеса 7 соединены с крышками 9, а последние - с дисками, ободами 10 и колесами 11 транспортного средства.
Межколесный редуктор включает паразитные шестерни 12 и 13, а также полуосевые конические шестерни 14. Последние соединены с помощью зубчатого соединения с гибкими колесами 8. Паразитная шестерня 13 связана с рулевым колесом 15.
Между рулевым колесом 15 и паразитной шестерней 13 может быть также установлен рулевой механизм 16, представляющий собой гидравлический усилитель руля либо механический редуктор. Паразитная шестерня
12 установлена на валу 3 привода главной передачи и свободно вращается на подшипнике 17.
Редуктор и главная передача помещены в корпусе ведущего моста 18, на чулках 19 последнего установлены подшипники 20, на которых вращаются ступицы 21 ведущих колес, соединенные с ободами 10 болтовым соединением. Торцы конечных передач за- щищены крышками 9. В последних установ- лены подшипники 22 внешних опор эксцентриковых валов. Их внутренние концы установлены на подшипниках 23 редуктора. Шестерни 14 редуктора вращаются на подшипниках 24, установленных в корпусе 18 ведущего моста. Кроме того, в корпусе 18 ведущего моста установлены подшипники 25, на которых вращаются вал привода 3 и паразитная шестерня 12. Эксцентриковые валы 5 соединены между собой валом 26,
соединенным с ведомой шестерней 2 глав- ной передачи.
Устройство работает следующим образом.
При вращении ведущей 1 и ведомой 2 шестерен главной передачи, а также связанных с ними вала 26 и эксцентриков 5 генераторов волн образуется волна деформации гибких колес 8. В результате одного оборота волнообразователя жесткое колесо 7 (число зубьев 7Ж), связанное с ведущим колесом 15, поворачивается относительно гибкого колеса (число зубьев Zr) на 7Ж - Zr зубьев. Частота вращения жесткого колеса 2Г/(2Ж - Zr) раз меньше, чем эксцентриков 5. На опорной поверхности с однородными сцепными свойствами оба колеса 11 вращаются с равной частотой и к ним приложены равные реактивные моменты. При этом на зубья паразитных шестерен 12 и 13 со стороны полуосевых шестерен 14 действуют равные усилия одного знака, момент которых не передается на вал рулевого колеса 15.
При вращении рулевого колеса 15 и связанного с ним рулевого вала 27 в ту или иную сторону гибкие колеса 8 поворачиваются на подшипниках 24 в противоположные стороны. При этом поворачиваются также связан- ные с ними жесткие колеса 7. Результирующая частота вращения жестко-: го колеса 7 одного борта в результате суммирования скоростей вращения, передаваемых от руля 15 и главной передачи, больше, чем на противоположном борту, где происходит вычитание упомянутых скоростей. Поэтому поворот рулевого колеса 15 на поверхности с однородными сцепными свойствами приводит к повороту транспортного средства.
При движении по основанию с разными сцепными свойствами или с асимметричной тяговой нагрузкой одно из колес 11 буксует больше, чем другое, что приводит к появлению их разных касательных сил тяги колес и момента сил на рулевом валу, а следовательно, к искривлению траектории движения. Для выпрямления последней водитель, воздействуя на руль 15, преодолевает разность моментов в контакте колес 11 с почвой.
Таким образом, упрощение конструкции, снижение габаритов и веса предлагаемого моста достигается благодаря тому, что в нем отсутствуют карданные валы и шарниры, рулевая трапеция и рулевой механизм, а также шкворневое устройство, бортов,ые редукторы содержат лишь по две зацепляющиеся шестерни, так как вместо планетарных бортовых передач в мосту применены
волновые, имеющие относительно большие передаточные числа трансмиссии при малых габаритах и весе. Повышение тягово- сцепных показателей при прямолинейном
движении и повороте достигается благодаря тому, что водитель имеет возможность регулировать соотношение окружных скоростей колес обоих бортов, не допуская полной пробуксовки одного из них. При этом
0 также отпадает необходимость в специальном механизме блокировки межколесного редуктора. .
На неподвижном руле, а следовательно, и гибких колесах жесткие колеса 7 и связан5 ные с ними ободы 1 и диски 21 правого и левого ведущих колес 11 вращаются с равной скоростью, причем реактивные усилия, действующие на правую и левую паразитные шестерни 12 и 13, взаимноуравновеши0 ваются и на рулевое колесо не передаются. Для поворота управляемого ведущего моста водитель поворачивает рулевое колесо 15, а вместе с ним и шестерню 13 редуктора. Это вызывает поворот правой и левой шестерен
5 14 в противоположные стороны, ускоряя движение внешнего и замедляя движение внутреннего ведущих колес 11. Чем больше скорость поворота руля 15, тем с меньшим радиусом поворачивается транспортное
0 средство. Руль 15 одновременно передает реактивный момент, который воспринимает водитель.
Описанное устройство работоспособно, хотя в нем отсутствует продольная и попе5 речная тяги, шкворневые устройства, карданные валы равных угловых скоростей. Волновые редукторы главных передач имеют большое передаточное число. Поэтому главная передача и редуктор передают ма0 лый крутящий момент и могут быть выполнены малогабаритными. Это приводит к снижению металлоемкости управляемого моста по сравнению с известными. Формула изобретения
5 Управляемый ведущий мост транспортного средства, имеющего рулевой механизм, содержащий главную передачу, выполненную в виде ведущей и ведомой конических шестерен, кинематически свя0 занную через редуктор, включающий паразитные шестерни и полуосевые шестерни с бортовыми редукторами, каждый из которых выполнен с входными звеньями, и выходными звеньями, связанными с
5 ведущими колесами и с опорными звеньями, отличающийся тем, что, с целью повышения эффективности работы за счет повышения тягово-сцепных показателей, бортовые редукторы выполнены волновыми, входные звенья которых выполнены эксцентриковыми валами и соединены с ведомой конической шестерней главной передачи, а их опорные звенья - с полуосевыми шестернями редуктора, а одна из паразитных шестерен - с рулевым механизмом, причем главная передача размещена внутри редуктора, а ведущая шестерня и паразитные шестерни выполнены соосными.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДНАЯ ГИПОИДНАЯ ГЛАВНАЯ ПЕРЕДАЧА | 2007 |
|
RU2353530C1 |
| ПРОХОДНАЯ ГИПОИДНАЯ ГЛАВНАЯ ПЕРЕДАЧА | 2007 |
|
RU2345910C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ ВЫСОКОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2163868C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| Трансмиссия двухосного полноприводного транспортного средства | 2017 |
|
RU2652359C1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| РЕДУКТОР СРЕДНЕГО МОСТА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2397389C2 |
| Трансмиссия транспортного средства | 1989 |
|
SU1740204A1 |
| ПРОХОДНАЯ ГЛАВНАЯ ПЕРЕДАЧА | 2015 |
|
RU2596638C1 |
Изобретение относится к трансмиссиям и ходовым системам транспортных средств малой механизации. Цель изобретения - повышение эффективности работы за счет повышения тягово-сцепных показателей Управляемый ведущий мост содержит главную передачу, выполненную в виде ведущей 1 и ведомой 2 конических шестерен, межколесный дифференциал, включающий полуосевые шестерни 14 и находящиеся с ними в зацеплении сателлиты 12 и 13, а также бортовые редукторы, выполненные в виде эпициклических передач, включающих входные звенья, выполненные в виде эксцентриков 5 с дисками 6, опорные звенья в виде гибких колес 8, а также выходные звенья в виде водила или жесткого колеса 7, соединенных с ведомой шестерней главной передачи, их опорные звенья - с полуосевыми шестернями, а один из сателлитов дифференциала - с рулевым механизмом. При неподвижном рулевом механизме происходит прямолинейное движение транспортного средства, а при его вращении - изменение частот вращения ведущих колес приводящее к повороту транспортного средства 1 ил. Ј
Я
15
| Состояние и тенденции развития конструкций средств малой механизации | |||
| - М.: ЦНИИТЭИТРАНСПОРТСЕЛЬХОЗМАШ, 1978 | |||
| Вып | |||
| Насос | 1917 |
|
SU13A1 |
| Antonow A.S | |||
| Milita rkraftfuhrzeuge | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ КОЛИЧЕСТВА ПРОХОДЯЩЕГО ПАРА В ТРУБАХ И НАГРУЗОК ПАРОВЫХ КОТЛОВ | 1921 |
|
SU595A1 |
