3
Изобретение относится к машиностроению и может быть использовано на автогрейдере.
Известна конструкция колесного автогрейдера, состоящего из задней силовой части и шарнирно соединенной с ней передней части, с механизмом взаимного поворота этих частей с силовыми цилиндрами, подача жидкости в которые регулируется золотниковым распределителем. На передней части i имеются управляемые колеса со следящим рулевым механизмом для их поворо та 1.
Такая система позволяет получать плавные небольшие повороты автогрейдера с большим радиусом при выполнении рабочего хода за счет поворота только управляемых передних колес, а также совершать крутой разворот автогрей ера с -уменьшенным радиусом поворота за счет одновременного поворота передних управляемых колес и передней части относительно задней.
Недостатком этого технического решения является необходимость осуществления крутого поворота с ис пользованием двух органов управления .
В другом известном решении авто- грейдер аналогичной конструкции имеет два соосных рулевых колеса, одно из которых (основное) осуществляет поворот передних колес, а другое (управляемое кончиками пальцев води- теля) осуществляет поворот сочлененных секций 2J..
Недостатком этого технического решения является неудобство управления при крутом развороте одновременным поворотом колес и частей рамы за счет одновременного поворота двух соосных рулевых колес.
Наиболее близким к предлагаемому, по технической сущности и достигаемому эффекту является система управления транспортного средства, имеющего шарнирно соединенные секции с рулевым механизмом для их взаимного по ворота, управляемые колеса со следящим механизмом для их поворота, гид ромеханический механизм, обеспечивающий последовательный привод обоих рулевых механизмов с помощью одного рулевого колеса, устройство выборочнго отключения рулевых механизмов
Эта система позволяет эффективно осуществлять и небольшие повороты и крутые повороты машины.
17
.
-.
5597
Недостатком известной системы при использова.ний на автогрейдере является снижение производительнос- ти автогрейдера в результате ухудшения маневренности при разворотах, среднего радиуса поворота и полосы разворота в результате последовательного (а не одновременного) поворота
JQ управляемых колес и частей рамы, приводящего к увеличению угла и времени поворота рулевого колеса.
Недостатком является также невозможность создать объединенную сис15 тему управления полунавесного автогрейдера на базе трактора с шарнирно сочлененной рамой с использованием имеющейся на тракторе системы управления .
20 Цель изобретения - повышение производительности за счет улучшения маневренности и уменьшения полосы разворота .
Указанная цель достигается тем,
25 что рулевое управление автогрейдера, имеющего шарнирно -оединенные секции с рулевым механизмом для их взаимного поворота, управляемые колеса со следящим рулевым механизмом для их поворота, общее рулевое колесо и устройство выборочного отключения рулевых механизмов, снабжена дополнительным согласующим редуктором с одним ведущий и двумя ведомыми валами, при этом ведущий вал свя3$ зан с рулевым колесом, а ведомьге валы связаны с рулевыми механизмами соответственно поворотом управляющих колес и поворотом частей рамы, при этом отношение передаточного числа от
4€ ведущего до первого ведомого вала к передаточному числу от ведущего до второго ведомого вала равно отношению максимального угла поворота ведущего вала механизма поворота частей рамы
максимальному углу поворота ведущего вала механизма поворота управляемых колес, а устройство выборочного отключения выполнено в виде муфт отключения ведомых валов с механизS© мами управления, которые кинематически связаны между собою противофазно, обеспечивая в среднем положении механизма управления совместное включение обеих муфт.
5S При часто используемом режиме работы автогрейдера с разворотом в пределах дорожного полотна и рабочими ходами в двух направлениях с профилировкой правой и левой сторон
полотна существенное время занимает разворот автогрейдера, так как полоса разворота длиннобазового автогрейдера обычно превышает ширину полотна и маневр совершается многоразовыми переключениями направления движения с изменениями направления поворота управляемых элементов. При таком режиме работы одновременный поворот управляемых колес и частей шарнирно сочлененной рамы вместо последовательного приводит к уменьшению угла поворота рулевого колеса, потерь времени на изменение положения управляемых элементов, среднего радиуса поворота и полосы разворота, а следовательно, к уменьшению времени маневрирования и увеличению производительности автогрейдера.
Кроме того, предлагаемое техническое решение позволяет получить дополнительный положительный эффект при навеске автогрейдерного оборудования на трактор: с использованием согласующего редуктора может быть использован для управления поворотом частей рамы рулевой механизм, стоящий на тракторе.
Использование устройства.выборочного отключения в виде муфт отключения, кинематически связанных между собою противофазно, обеспечивает безопасность работы даже при ошибках в управлении, так как отсутствует возможность отключения рулевого колеса от обоих управляемых элементов.
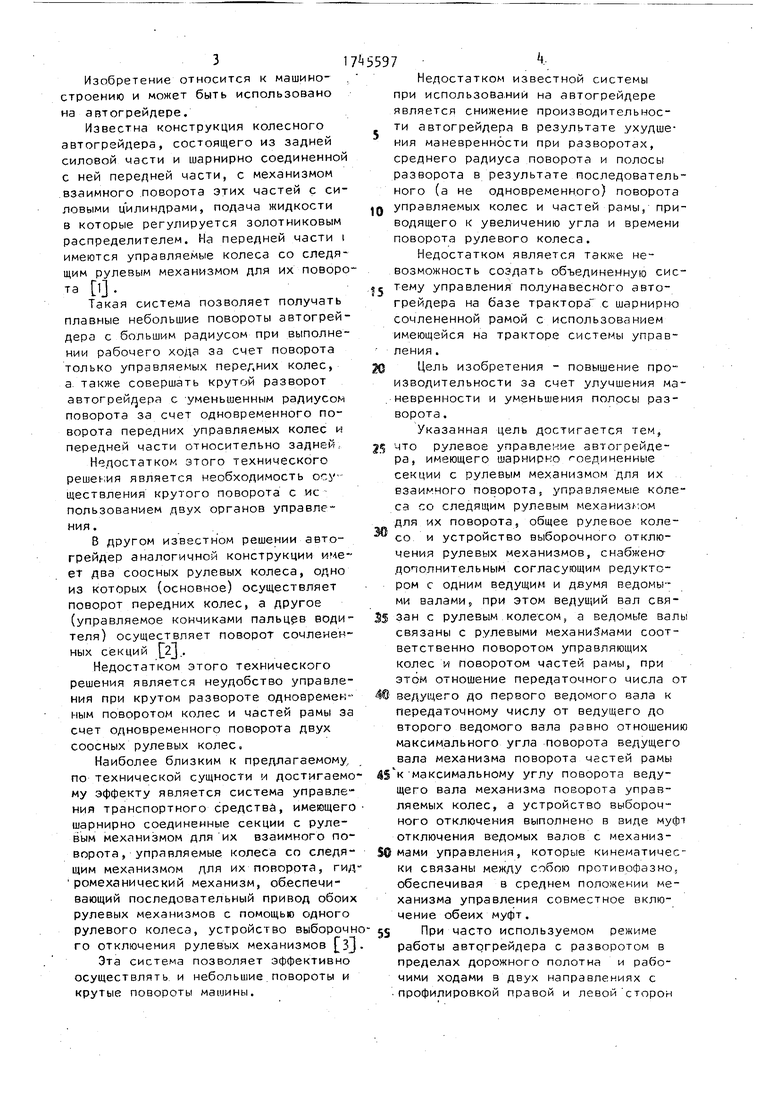
На фиг.1 представлена схема автогрейдера; на фиг.2 - пример кинематической схемы согласующего редуктора . рулевого управления.
Автогрейдер состоит из трактора 1 и полунавесного грейдерного оборудования 2. Полунавесное грейдерное оборудование имеет передний мост 3 с управляемыми колесами,- цилиндр k поворота колес и рулевой механизм 5 грейдера, соединенный с полостями цилиндра k трубопроводами 6 и 7.
Рама трактора состоит из двух частей 8 и 9, вертикального шарнира 10, цилиндра 11 поворота частей рамы, рулевого механизма 12 управления поворотом трактора, соединенного с полостями цилиндра 11 трубопроводами 13 и 11.. На трактор дополнительн установлен согласующий редуктор 15 рулевого управления, на ведущем валу 16 которого установлено рулевое
0
5
0
5
колесо Два ведомые вала соединены карданами 18 и 19 соответственно с руле выми механизмами грейдера и трактора.,
Согласующий редуктор рулевого управления имеет один ведущий вал 16 и два ведомых вала 20 и 21. Ведущая шестерня 22 жестко связана с валом, а ведомые шестерни 23 и 2k свободно вращаются на валах (установлены на подшипниках) и имеют дополнительные венцы с внутренними зубьями.
На шлицевых ведомых валах посажё- ны,муфты 25 и 26 включения, имеющие i наружные зубчатые ченцы и пазы, в которые входят рабочие элементы двухсторонней вилки 27 переключения, жестко посаженной на оси 28, на которую посажен также рычаг 29 переключения (с рукояткой) .
Рулевое управление работает следующим образом.
В основном рабочем режиме автогрейдера (копание, движение по пря - мым участкам дороги) рычаг 29 находится в положении, показанном на фиг.2 (первое фиксированное положение рукоятки). При этом шестерня 23 находится в зацеплении с первым ведомым валом 20, а шестерня 2k свободно вращается на втором ведомом валу 21. В этом положении шарнирно сочлененные части рамы трактора должны быть установлены прямо,,для установки такого положения в кабине может
быть установлен указатель взаимного поворота рам трактора или в системе установлен фиксатор прямого положе ния рам.
При необходимости поворота автогрейдера водитель поворачивает рулевое колесо, угловое перемещение передается от шестерни 22 на шестерню - 23, вал 20 и через карданный вал 18 на ведущий вал рулевого механизма 5 при этом включается поток жидкости и, соответственно, перемещается шток цилиндра k, поворачивая колеса.
При крутом развороте грейдера для осуществления рабочего хода в обратном направлении водитель сначала перемещает рычаг 20 во второе фиксированное положение, при котором входит в зацепление с венцами обеих ведомых 5 шестерен 23 и 2 зубья муфт 25 и 26 (на половину своей полной длины). В этом случае при повороте рулевого колеса угловые перемещения передаются одновременно на два рулевых механиз0
5
0
5
0
ма 5 и 12 грейдера и трактора и изменяются длины цилиндров 4 и И, поворачивая управляемые колеса и части г рамы трактора. Так как отношение числа зубьев шестерни 23 к числу зубьев шестерни 2 обратно пропорционально отношению максимальных углов поворо-- та ведущих валов рулевых механизмов 5 и 12, то максимальный угол поворота управляемых колес и частей рамьг , трактора достигается одновременно, обеспечивая минимальный радиус поворота автогрейдера, а при вращении рулевого колеса в обратную сторону одновременно достигается прямолиней-1 ное положение колес и частей рамы автогрейдера. В отличие от транспортных машин разворот автогрейдера для следования назад на рабочей площадке осуществляется на невысокой скорости и при отсутствии помех для движения, поэтому согласование углов поворота управляемых колес и частей рамы по более сложному закону не требуется.. При ..);/гих условиях движения предлагаемое техническое pt - шение позволяв1 подителю зыбрать ., тимальный реж1 - ;.г -мения .
Например, др.--ом повороте ч транспортном г. Чпе водитель сначала может вывернусь управляемые колеса на максимальный угол, а зате, переключив рычаг 29S повернуть части рамы (так дег.ают поворот и транспортные машины), а при осуществле™ нии отъезда на передаче реверса управлять только поворотом частей рамы трактора, для чего рычаг 29 перево дится в третье фиксированное положение, при котором муфта 26 на всю глубину зуба входит в зацепление с венцом шестерни 2k, а зубья муфты 25 выходят из зацепления с венцом шестерни 23. В этом случае вращение рулевого колеса передается только на рулевой механизм поворота мастей рамы т трактора, обеспечивая поворот агрегата.
Таким образом, предложенный рулевой механизм имеет широкие функциональные возможности, при совершении f
крутого поворота обеспечивает одновременный поворот колес и частей рамы трактора при минимальном угле поворо- та рулевого колеса, что уменьшает фактический средний радиус поворота автогрейдера, полосу разворота и время маневрирования.Согласующий редуктор позволяет .обеспечить управление машиной с различными (в том числе отличными по конструкции) рулевыми механизмами грейдера и трактора.
Формула изобретения
1 . Рулевое управление автогрейдера, имеющего шарнирно сочлененные секции рамы и управляемые колеса,
содержащее следящий рулевой механизм, гидравлически соединенный с гидроцилиндром поворота управляемых колес, рулевой механизм, гидравлически соединенный с гидроцилиндром складывания секций шарнирно сочлененной рамы, устройство выборочного отключения рулевых механизмов и рулевое колесо, отличающееся тем, что, с целью улучшения маневренности автогрейдера, оно снабжено согласующим редуктором с одним ведущим валом,1 кинематически связанным с рулевым колесом, и двумя ведомыми валами, кинематически связанными с упомянутыми рулевыми механизмами, а устройство
выборочного отключения выполнено в виде муфт отключения ведомых валов с механизмами управления кинематически связанными между собой противо- фазно с возможностью включения обеих
муфт в среднем положении механизма управления,
2. Управление по п.1, о т л и - чающееся тем, что отношение передаточного числа от ведущего до
5 ведомого вала, связанного со следящим рулевым механизмом, к передаточному числу от ведущего до ведомого вала, связанного с рулевым механизмом, выбрано равным отношению максимальных
углов поворота упомянутых ведущих валов.
-,
§
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОГРЕЙДЕР | 2023 |
|
RU2824766C1 |
| Малогабаритный трактор | 1990 |
|
SU1785922A1 |
| Трактор колесный сельскохозяйственный с электромеханической трансмиссией | 2022 |
|
RU2814696C1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА БАЛКИ МОСТА И ПОЛУРАМ ТРАКТОРА | 2014 |
|
RU2555875C1 |
| Быстроходный двухосный колёсный вездеход на шинах сверхнизкого давления с комбинированной системой управления | 2017 |
|
RU2652936C1 |
| Шарнирный узел полноприводного автогрейдера тяжелого типа | 2024 |
|
RU2823972C1 |
| КОЛЕСНАЯ БРОНЕМАШИНА | 2005 |
|
RU2314478C2 |
| ТРАКТОР-УНИВЕРСАЛ С ШАРНИРНО СОЕДИНЁННЫМИ ПОЛУРАМАМИ | 2014 |
|
RU2576847C2 |
Изобретение относится к машиностроению и может быть использовано на автогрейдерах. Цель изобретения И улучшение маневренности автогрейдера, ы автогрейдер, имеющий шарнирно сочлененные секции с рулевым механизмом 12 для их взаимного поворота, управляемые колеса со следящим рулевым механизмом 5 для их поворота, общее рулевое колесо 17, устройство выбором - ного отключения рулевых механизмов 27, введен согласующий редуктор с одним ведущим 16 и двумя ведомыми 20 и 21 валами, причем ведущий вал 16 связан с рулевым колесом, а ведомые валы 20 и 21 - с механизмами поворота колес и частей рамы При включении устройства выборочного отключения рулевых механизмов 27 и вращении руле, вого колеса 17 производится одновременный поворот управляемых колес автогрейдера и складывание секций шарнирно сочлененной рамы. 1 з«п. ф-лы, 2 ил. ю И vi ds СД СЛ СО 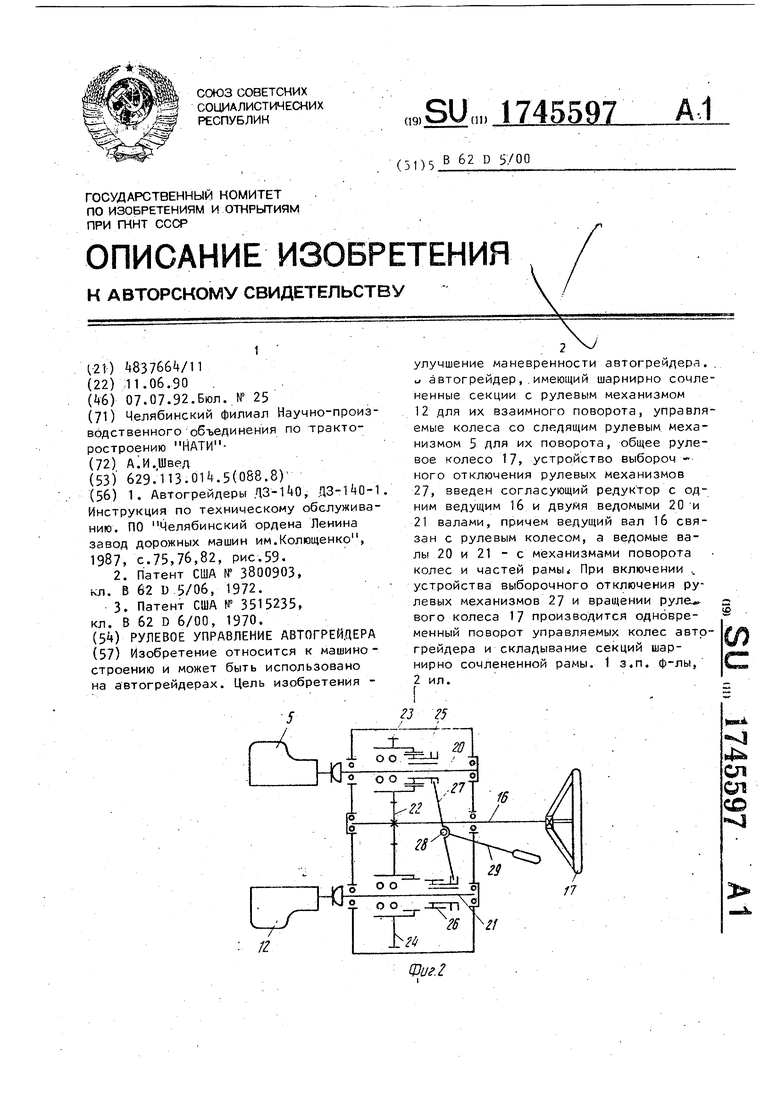
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автогрейдеры ЦЗ-UO, ЦЗ-Т+0-1 | |||
| Инструкция по техническому обслуживанию | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
