Цель достигается тем, что поворотная платформа имеет в передней части дополнительный направляющий блок, установленный подвижно на кронштейне, а лебедка подъема снабжена дополнительными тяго- выми барабанами и запасованными на них канатами тяги, причем подъемные и тяговые барабаны снабжены механизмами управления, а канаты подъема и тяги установлены с образованием полиспастных систем, при этом тяговый канат имеет полиспаст с большим передаточным отношением и связывает систему направляющих блоков и нижний конец рукояти.
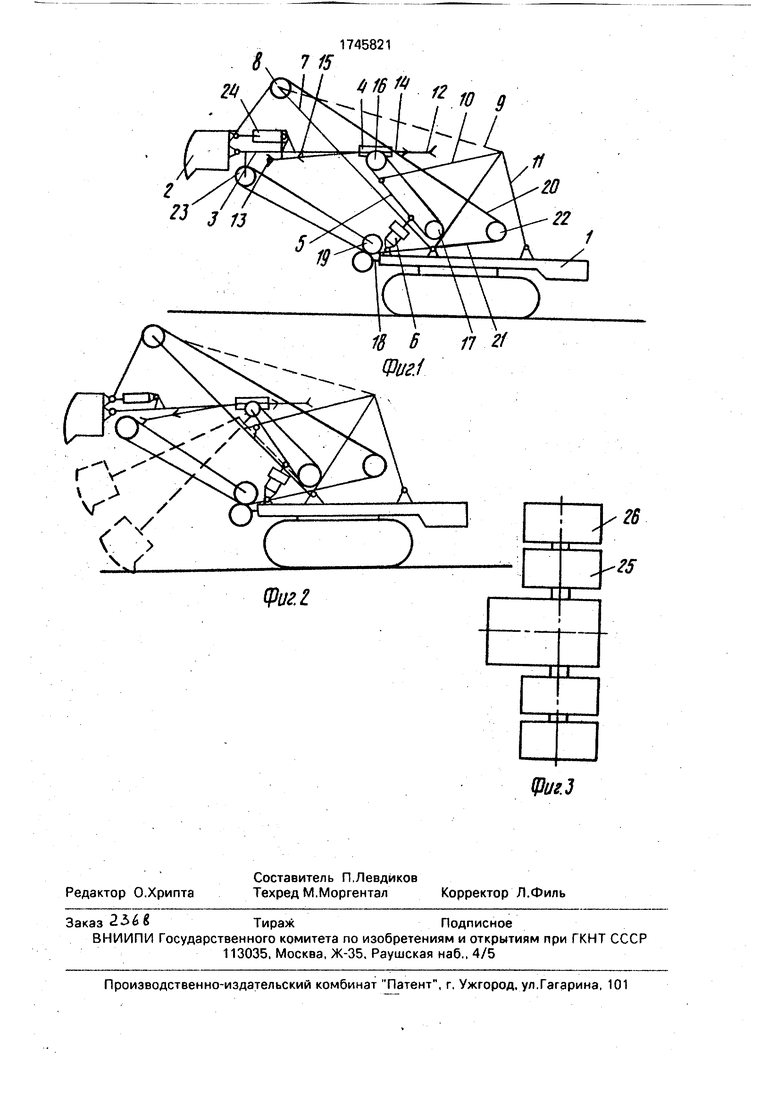
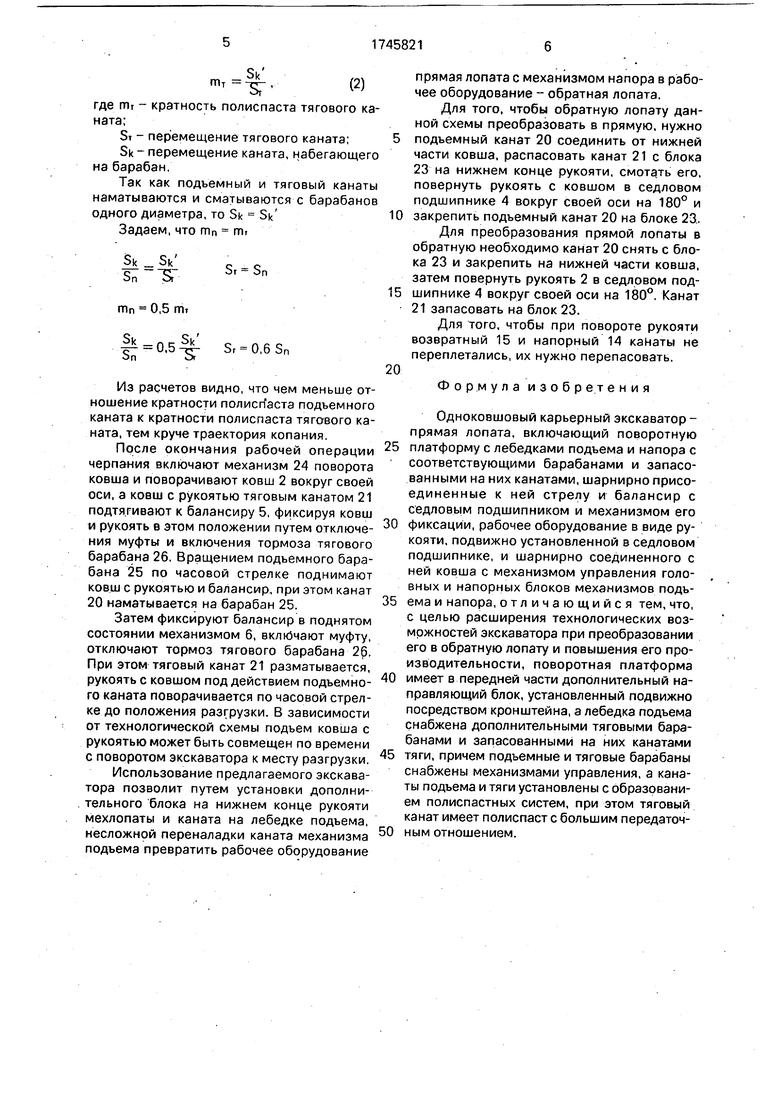
На фиг.1 изображена кинематическая схема рабочего оборудования экскаватора; на фиг.2 - то же, с различным положением ковша при его рабочем ходе; на фиг.З - лебедка подъема, вид сверху.
Экскаватор содержит установленное на поворотной платформе 1 рабочее оборудование, которое состоит из ковша 2, щэрнир- но соединенного с рукоятью 3, пропущенной через седловой подшипник 4, закрепленный на верхнем конце балансира 5, установленного на поворотной платформе 1 с возможностью его стопорения с помощью механизма б фиксации. Стрела 7 с головными блоками 8 шарнирно соединена с поворотной платформой 1 и посредством канатов 9 и подкосов 10 - с двуногой стойкой. На верхнем и нижнем концах рукояти 3 расположены соответственно напорный 12 и возвратный 13 блоки, соединенные посредством напорного 14 и возвратного 15 канатов, перекинутых через блоки 16 седло- вого подшипника 4, с лебедкой напора 17. На поворотной платформе 1 расположен кронштейн 18, на котором вертикально установлены направляющие блоки 19. Меха- низм подъема содержит канаты 20 и 21, закрепленные на диаметрально расположенных концах барабанов подъемной лебедки 22. Канат 20 через головной блок 8 соединен с ковшом 2, а канат 21. огибая блок 19 и блок 23, установленный на нижнем конце рукояти 3, закреплен, например, на поворотной платформе 1. Задний конец ковша 2 посредством механизма поворота 24 ковша соединен с рукоятью 3.
Лебедка 22 подъема содержит установленные на валу барабаны 25, к которым прикреплены канаты 20 подъема и барабаны 26 с прикрепленными к ним канатами 21 тяги. Барабаны 25 и 26 имеют управляемые муф- ты и тормоза (не показаны). Возможно управление подъемным и тяговым канатами посредством отдельных лебедок с индивидуальными приводами.
Экскаватор работает следующим образом.
Вращая барабаны 25 и 26 подъемной лебедки 22 по часовой стрелке посредством канатов 20 поднимают ковш 2 с рукоятью 3 и балансир 5 (при отключенном механизме фиксации 6) в исходное верхнее положение. Вращая барабаны 25 и 26 подъемной лебедки 22 против часовой стрелки, а барабаны лебедки напора 17 по часовой, поворачивают канатом 21 рукоять 3, а напорным канатом 14 перемещают последнюю вдоль седлового подшипника 4, осуществляя напор. При этом канат 20 сматывается с барабана 25, а канат 21 наматывается на барабан 26 подъемной лебедки 22, балансир 5 опускается.
При работе экскаватора в положении ковша и блока 23 выше оси верхнего блока 19 тяговый канат 21 расположен в ручье верхнего блока, при копании ниже этого уровня - в ручье-нижнего блока 19. Траектория рабочего движения образуется при сложном взаимодействии механизмов подъема, напора и веса рабочего оборудования
В кинематическом отношении неподвижными звеньями рабочего оборудования экскаватора являются поворотная платформа 1, стрела 7 и двуногая стойка 11, В точках 01,02,0зс неподвижными звеньями входят во вращательные пары подвижные звенья - головной блок стрелы 8, балансир 5. подъемный 25 и тяговый 26 барабаны лебедки 22. Балансир 5, в свою очередь, в точках А и Е образует вращательные пары с рукоятью 3 и направляющим блоком 19. Рукоять 3 с ковшом 2 в точке В образуют вращательные пары с подъемным и тяговым 21 канатами.
Вследствие того, что полиспастность тягового каната в П раз больше, чем подъемного, происходит поворот рукояти относительно ее шарнирного соединения с балансиром и поворот балансира относительно его пятового шарнира, так как подъемный и тяговый канаты проходят разное расстояние. Поясним данный вывод теоретически.
mn
Sk
Sn
О)
где mr - кратность полиспаста подъемного каната;
SR - перемещение каната, сбегающего с барабана лебедки;
Sn - перемещение подъемного каната
m -Sk
тт--5Ггде гпт - кратность полиспаста тягового каната;
St - перемещение тягового каната;
Sk - перемещение каната, набегающего на барабан.
Так как подъемный и тяговый канаты наматываются и сматываются с барабанов одного диаметра, то Sk Sk
Задаем, что mn mi
Sk sk;
Sn Бг
mn 0,5 rrit
Sr - Sn
,5- Sr 0,6Sn
OnOr
Из расчетов видно, что чем меньше отношение кратности полисгГаста подъемного каната к кратности полиспаста тягового каната, тем круче траектория копания.
После окончания рабочей операции черпания включают механизм 24 поворота ковша и поворачивают ковш 2 вокруг своей оси, а ковш с рукоятью тяговым канатом 21 подтягивают к балансиру 5, фиксируя ковш и рукоять в этом положении путем отключения муфты и включения тормоза тягового барабана 26. Вращением подъемного барабана 25 по часовой стрелке поднимают ковш с рукоятью и балансир, при этом канат 20 наматывается на барабан 25.
Затем фиксируют балансир в поднятом состоянии механизмом 6, вклнЗчают муфту, отключают тормоз тягового барабана 2Ј, При этом тяговый канат 21 разматывается, рукоять с ковшом под действием подъемного каната поворачивается по часовой стрелке до положения разгрузки. В зависимости от технологической схемы подъем ковша с рукоятью может быть совмещен по времени с поворотом экскаватора к месту разгрузки.
Использование предлагаемого экскаватора позволит путем установки дополнительного блока на нижнем конце рукояти мехлопаты и каната на лебедке подъема, несложной переналадки каната механизма подъема превратить рабочее оборудование
прямая лопата с механизмом напора в рабочее оборудование - обратная лопата.
Для того, чтобы обратную лопату данной схемы преобразовать в прямую, нужно 5 подъемный канат 20 соединить от нижней части ковша, распасовать канат 21 с блока 23 на нижнем конце рукояти, смотать его, повернуть рукоять с ковшом в седловом подшипнике 4 вокруг своей оси на 180° и 10 закрепить подъемный канат 20 на блоке 23.
Для преобразования прямой лопаты в обратную необходимо канат 20 снять с блока 23 и закрепить на нижней части ковша, затем повернуть рукоять 2 в седловом под- 15 шипнике 4 вокруг своей оси на 180°. Канат 21 запасовать на блок 23.
Для того, чтобы при повороте рукояти возвратный 15 и напорный 14 канаты не переплетались, их нужно перепасовать. 20
Формула изобретения
Одноковшовый карьерный экскаватор - прямая лопата, включающий поворотную
25 платформу с лебедками подъема и напора с соответствующими барабанами и запасо- ванными на них канатами, шарнирно присоединенные к ней стрелу и балансир с седловым подшипником и механизмом его
30 фиксации, рабочее оборудование в виде рукояти, подвижно установленной в седловом подшипнике, и шарнирно соединенного с ней ковша с механизмом управления головных и напорных блоков механизмов подъ35 ема и напора, отличающийся тем, что, с целью расширения технологических возможностей экскаватора при преобразовании его в обратную лопату и повышения его производительности, поворотная платформа
40 имеет в передней части дополнительный направляющий блок, установленный подвижно посредством кронштейна, а лебедка подъема снабжена дополнительными тяговыми барабанами и запасованными на них канатами
45 тяги, причем подъемные и тяговые барабаны снабжены механизмами управления, а канаты подъема и тяги установлены с образованием полиспастных систем, при этом тяговый канат имеет полиспаст с большим передаточ50 ным отношением.
8. 715
1745821
&
416M
12
W 9
ff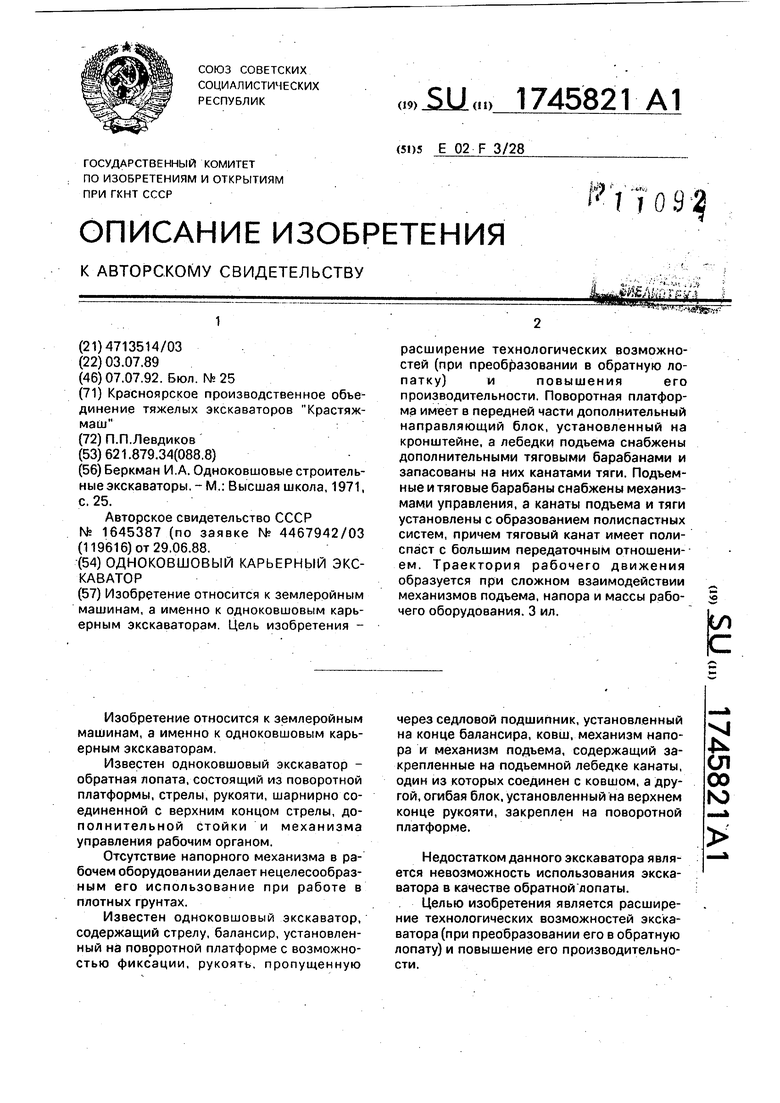

| название | год | авторы | номер документа |
|---|---|---|---|
| Сменное оборудование драглайна для канатного экскаватора "прямая лопата", содержащего напорный механизм, стрелу с головным блоком и подъемной лебедкой | 1990 |
|
SU1709026A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА ТИПА «ПРЯМАЯ ЛОПАТА» | 1971 |
|
SU290997A1 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ТИПА ПРЯМАЯ ЛОПАТА ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1967 |
|
SU215107A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА ТИПА ПРЯМАЯ ЛОПАТА | 1970 |
|
SU281269A1 |
| Рабочее оборудование экскаватора - прямая лопата | 1981 |
|
SU968202A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU244212A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |