Изобретение относится к вскрышным экскаваторам и может быть использовано для экскаваторов других типов землеройных машин.
Цель изобретения - повышение производительности и надежности вскрышных экскаваторов.
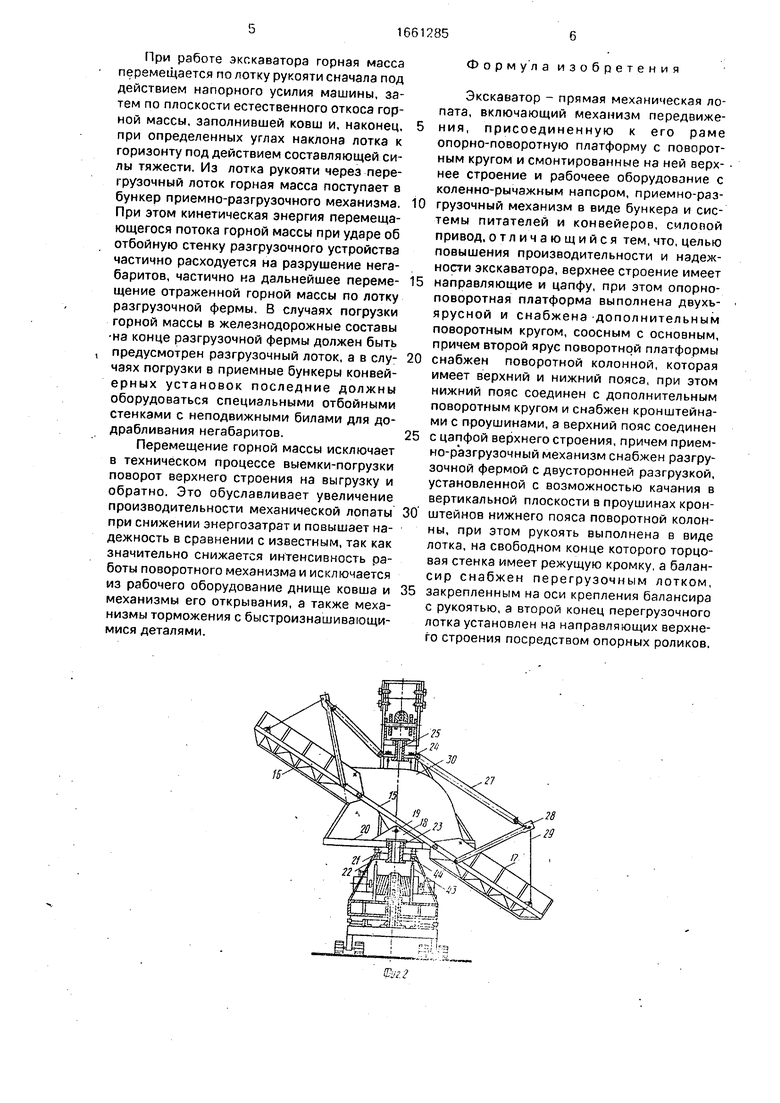
На фиг, 1 изображена механическая лопата, продольный разрез; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - неполнопо- воротная вращающаяся колонна,в двух проекциях; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - предельные углы схождения стрелы и консолей разгрузочного устройства при различных положениях поворотной платформы верхнего строения и вращающейся колонны.
У механической лопаты с коленно-рычажным напором однобалочная рукоять круглого сечения заменена двухбалочной коробчатого прямоугольного сечения 1. К балкам 1 приварено на всем протяжении днище из листовой стали, при этом образуется лоток 2 для перемещения горных пород. Ковш 3 является продолжением рукояти, 9 на его передней торцовой стенке имеется режущая кромка, снабженная зубьями 4. На втором конце рукоятки имеются отливка 5 с отверстиями, к которым с помощью пальцев 6 рукоять соединяется с балансиром 7 напорного механизма. На отливке предусматриваются проушины, со- осные с отверстиями рукояти и балансира, к которым шарнирно крепится верхний конец перегрузочного лотка 8. Второй конец перегрузочного лотка располагается выше приемной части 9 разгрузочного механизма 10, Перегрузочный лоток снабжен опорными роликами 11, перекатывающимися по направляющим 12, закрепленным на верхнем строении. Положение направляющих может регулироваться, что дает возможность изменения направления потока горной массы в вертикальной плоскости.
Качание балансира в вертикальной плоскости осущест вляется напорной балкой 13, соединенной с ним осями 14. Напорная балка совершает перемещения с помощью напорного механизма.
Приемно-разгрузочный механизм состоит из разгрузочной фермы 15 с двумя консолями (левой 16 и правой 17) и приемной части 9. Своей средней частью разгрузочная ферма 15 шарнирно присоединена с помощью проушин 18 и пальцев 19 к нижнему пояску поворотной колонны 20 и может качаться в вертикальной плоскости. Ось вращения поворотной колонны совпадает с осью вращения верхнего строения, что обеспечивает независимость относительного поворота верхнего строения и поворотной колонны. Для этих целей нижний пояс 21 колонны 20 опирается на опорно-поворотное устройство 22 и центрируется цапфой 23, а верхний пояс 24 с помощью цапфы 25 и втулки закрепляется в верхней части верхнего строения, Поворот колонны осуществляется с помощью индивидуального поворотного механизма 26. Качание разгру0 зочной фермы производится с помощью механизма, состоящего из двух полиспастов 27, двух мачт 28, тяг 29, соединяющих оголовки разгрузочных консолей с мачтами и двухбарабанной подъемной лебедки 30 с
5 приводом, расположенной на колонне. Концы канатов полиспастов запасованы на барабане так, что при намётывании на барабан одного каната происходит синхронное сматывание другого.
0 Задняя стенка 31 приемного бункера представляет мощный отбойный щит, рассчитанный на большие ударные импульсы и имеет неподвижные билы 32 для дробления негабаритов, падающих с большой скоро5 стыо из перегрузочного лотка.
Остальные элементы устройства -подъемный 33, напорный 34, ходовой 35 и поворотный 36 механизмы заимствованы от карьерных и вскрышных механических ло0 пат.
Нижнее строение включает сварную раму 37, на которой смонтирован поворотный зубчатый венец 38 с кольцевыми рельсами 39. К боковым поверхностям нижней рамы
5 закреплены гусеничные тележки 40 с индивидуальными приводами.
Верхнее строение разделяется на два яруса. Основой первого яруса является поворотная платформа 41, на которой разме0 щены силовые агрегаты 42, щиты и приборы управления, подъемная лебедка, механизмы поворота верхнего строения и портала с приводами, опоры 43 и балки 44 второго яруса. На втором ярусе располагаются ко5 ленно-рычажный напорный механизм с напорной лебедкой, рабочее оборудование, неполно-поворотная колонна 20 с разгрузочным устройством и опоры надстройки 45. Соединенные с помощью пальцев опоры
0 надстройки, нижняя секция 46, стрелы и раскосы 47 образуют жесткую пространственную ферму, в верхней части которой на специальной площадке 48 закреплены станины с седловым подшипником 49, напор5 ный и возвратный блоки 50. На оголовке надстройки закреплены блоки 51 и регулировочные устройства канатной подвески стрелы 52, второй комплект блоков 53, который закреплен на оголовке стрелы экскаватора.
При работе экскаватора горная масса перемещается по лотку рукояти сначала под действием напорного усилия машины, затем по плоскости естественного откоса горной массы, заполнившей ковш и, наконец, при определенных углах наклона лотка к горизонту под действием составляющей силы тяжести. Из лотка рукояти через перегрузочный лоток горная масса поступает в бункер приемно-разгрузочного механизма. При этом кинетическая энергия перемещающегося потока горной массы при ударе об отбойную стенку разгрузочного устройства частично расходуется на разрушение негабаритов, частично на дальнейшее перемещение отраженной горной массы по лотку разгрузочной фермы. В случаях погрузки горной массы в железнодорожные составы на конце разгрузочной фермы должен быть предусмотрен разгрузочный лоток, а в случаях погрузки в приемные бункеры конвейерных установок последние должны оборудоваться специальными отбойными стенками с неподвижными билами для до- драбливания негабаритов.
Перемещение горной массы исключает в техническом процессе выемки-погрузки поворот верхнего строения на выгрузку и обратно. Это обуславливает увеличение производительности механической лопаты при снижении энергозатрат и повышает надежность в сравнении с известным, так как значительно снижается интенсивность работы поворотного механизма и исключается из рабочего оборудование днище ковша и механизмы его открывания, а также механизмы торможения с быстроизнашивающимися деталями.
Формула изобретения
Экскаватор - прямая механическая лопата, включающий механизм передвиже- ния, присоединенную к его раме опорно-поворотную платформу с поворотным кругом и смонтированные на ней верхнее строение и рабочеее оборудование с коленно-рычажным напором, приемно-разгрузочный механизм в виде бункера и системы питателей и конвейеров, силопой привод, отличающийся тем, что, целью повышения производительности и надежности экскаватора, верхнее строение имеет
направляющие и цапфу, при этом опорно- поворотная платформа выполнена двухъярусной и снабжена дополнительным поворотным кругом, соосным с основным, причем второй ярус поворотной платформы
снабжен поворотной колонной, которая имеет верхний и нижний пояса, при этом нижний пояс соединен с дополнительным поворотным кругом и снабжен кронштейнами с проушинами, а верхний пояс соединен
с цапфой верхнего строения, причем прием- но-разгрузочный механизм снабжен разгрузочной фермой с двусторонней разгрузкой, установленной с возможностью качания в вертикальной плоскости в проушинах кронштейнов нижнего пояса поворотной колонны, при этом рукоять выполнена в виде лотка, на свободном конце которого торцовая стенка имеет режущую кромку, а балансир снабжен перегрузочным лотком,
закрепленным на оси крепления балансира с рукоятью, а второй конец перегрузочного лотка установлен на направляющих верхнего строения посредством опорных роликов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| Экскаватор и его поворотная платформа | 1986 |
|
SU1379412A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| Рабочее оборудование экскаватора - прямая лопата | 1981 |
|
SU968202A1 |
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 1990 |
|
RU2023113C1 |
| Экскаватор | 1939 |
|
SU58598A1 |
| Рабочее оборудование экскаватора | 1989 |
|
SU1700149A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU244212A1 |


Изобретение относится к вскрышным экскаваторам и может быть использовано для экскаваторов других типов и землеройных машин. Цель - повышение производительности и надежности вскрышных экскаваторов. Двухбалочная рукоять (Р) 1 со сплошным днищем образует лоток (Л) 2, имеет режущую кромку 3 с зубьями 4. Отливкой Р 1 шарнирно соединена с балансиром 7 и верхним концом перегрузочного Л 8, второй конец которого имеет опорные ролики 11, установленные на направляющих 12, закрепленных на верхнем строении. Приемно-разгрузочный механизм состоит из приемно-разгрузочной фермы и приемного устройства. Ферма установлена на поворотной колонне (ПК) 20 шарнирно с возможностью качания, а ПК 20 снабжена дополнительным опорно-поворотным кругом и закреплена на цапфе верхнего строения. При работе экскаватора грунт движется по Р 1 и Л 2, перемещается к приемному устройству, на неподвижных билах дополнительно размельчается и далее по разгрузочной ферме, установленной под необходимым углом к горизонту на ПК 20, перемещается в транспортные средства или на конвейер. 5 ил.
о
Фиг. 5
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 0 |
|
SU192087A1 |
