Изобретение относится к измерительной технике и может быть использовано для измерения механических реверсивных перемещений в широком диапазоне.
Известен датчик перемещений, содержащий источник излучения, волоконно-оптическую ЛИНР- о связи, чувствительный элемент в виде полувитка световода и фотоприемник.
Недостатком указанного датчика является его сравнительно низкая чувствительность.
Известен волоконно-оптический датчик перемещений, содержащий корпус, установленный в нем дифференцированный чувствительный элемент в виде двух многовитковых участков волоконных световодов, оптически связанных с соответствующими источниками излучения и фотоприемниками, примененный в измерителе скоростного напора.
Недостатком этого датчика является малый диапазон измеряемых перемещений, порядка единиц миллиметров.
Наиболее близким по технической сущности к предлагаемому является устройство для измерения перемещений, содержащее корпус, ролик, установленный в корпусе с возможностью поворота вокруг своей оси, датчик угла поворота, кинематически свя- . занный с роликом, блок обработки, вход которого подключен к выходу датчика угла поворота.
Указанное устройство имеет фотоэлектрический датчик угла поворота ролика- выполненный в виде диска с круговой дифракционной решеткой. В процессе вращения диска вырабатываются, в конечном итоге, импульсы, количество которых пропорционально углу поворота измерительного ролика, связанного с линейным перемещением объекта. Эти импульсы подсчитываются электронным счетчиком.
VI
Ь. Ч 00
VI ел
Это устройство позволяет измерять линейные перемещения контролируемого обьекта в широком диапазоне перемещений. Однако в известном техническом решении предъявляются высокие требования к точности изготовления дифракционной решетки, причем, при повышении точности измерения .габариты решетки тоже растут.
В известном устройстве фотоэлектрический преобразователь содержит открытый канал фотоизлучения и фотоприемника, чувствительные к загрязнению пылью, аэрозолями. Известное техническое решение не позволяет использовать его в пыльных, агрессивных взрыво- и пожароопасных ере- дах, а также при воздействии электромагнитных помех, поскольку электрические элементы фотоэлектрического преобразователя непосредственно находятся в измерителе. В известном решении отсчет положения производится всегда только от начала координат. Для определения другого положения необходимо возвратить всю систему в начало координат и начать измерение оттуда. Определение по- ложения при реверсивном перемещении объекта невозможно. В данном устройстве нет возможности судить об угловом положении ролика, когда он находится в покое или перемещается с малой скоростью. Это не позволяет вводить поправки на угловое положение в случае эксцентриситета измерительного ролика.
Перечисленные недостатки могут существенно снижать точность измерения ли- нейных перемещений.
Цель изобретения - повышение точности измерения линейных перемещений.
Указанная цель достигается тем, что в датчике перемещений, содержащем корпус, ролик, установленный в корпусе с возможностью поворота вокруг своей оси, датчик угла поворота, кинематически связанный с роликом, блок обработки, вход которого подключен к выходу датчика угла поворота, датчик угла поворота выполнен в виде диска, эксцентрично скрепленного с роликом, двух штоков, установленных в корпусе с возможностью смещения вдоль оси их симметрии так, что эти оси перпендикулярны друг другу и оси поворота ролика, двух пар волоконно-оптических датчиков смещения, каждая из которых сопряжена с соответствующим штоком, выходы волоконно-опти- ческих датчиков в каждой паре подключены к соответствующим входам блока обработ- ки по дифференциальной схеме, а каждый волоконно-оптический датчик выполнен в виде волоконного световода с многовитко- вым участком, излучателя, оптически связанного со входным торцом волоконного световода, и фотоприемника, оптически связанного с выходным торцом волоконного световода.
Новым признаком предлагаемого изобретения является выполнение датчика угла поворота в виде диска, эксцентрично скрепленного с роликом, двух штоков, установленных в корпусе с возможностью смещения вдоль оси их симметрии так, что эти оси перпендикулярны друг другу и оси поворота ролика, двух пар волоконно-оптических датчиков смещения, каждая из которых сопряжена с соответствующим штоком, выходы волоконно-оптических датчиков в каждой паре подключены к соответствующим входам блока обработки по дифференциальной схеме, а каждый волоконно-оптический датчик выполнен в виде волоконного световода с многовитко- вым участком, излучателя, оптически связанного со входным торцом волоконного световода, и фотоприемника, оптически связанного с выходным торцом волоконного световода.
И именно указанное исполнение устройства обеспечивает достижение положительного эффекта - павышение точности измерения перемещения.
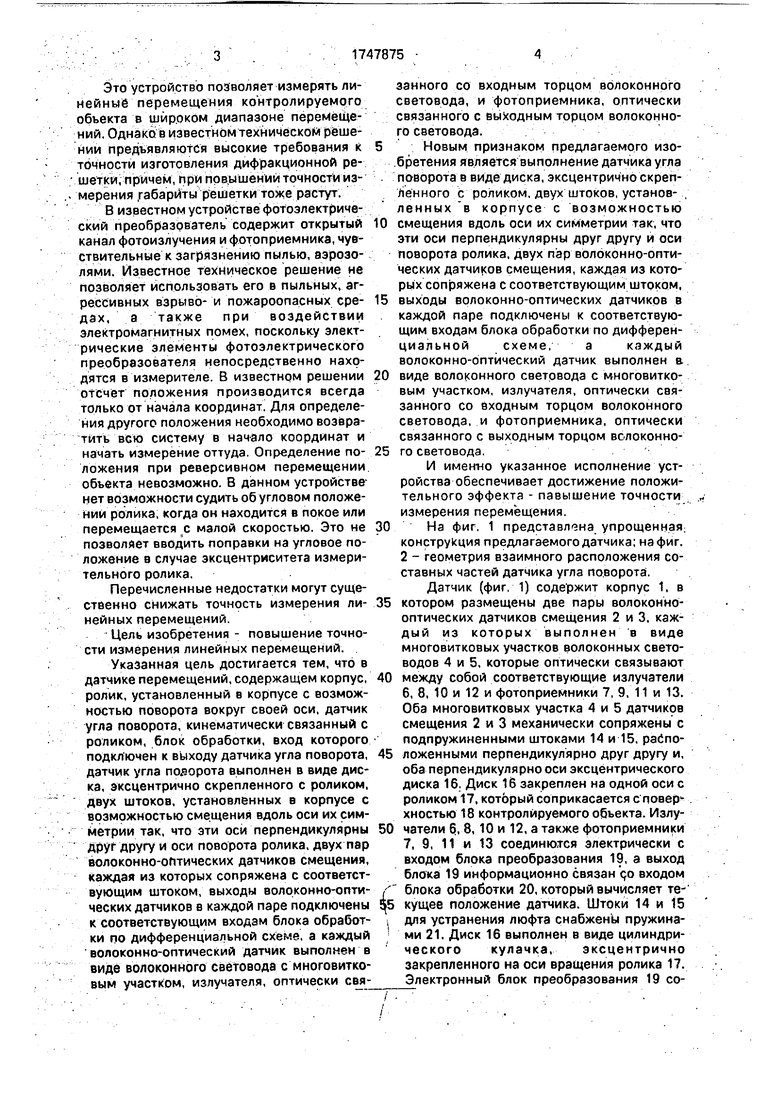
На фиг. 1 представлена упрощенная конструкция предлагаемого датчика; на фиг. 2 - геометрия взаимного расположения составных частей датчика угла поворота.
Датчик (фиг. 1) содержит корпус 1, в котором размещены две пары волоконно- оптических датчиков смещения 2 и 3. каждый из которых выполнен в виде многовитковых участков волоконных световодов 4 и 5, которые оптически связывают между собой соответствующие излучатели
6,8, 10 и 12 и фотоприемники 7, 9, 11 и 13. Оба многовитковых участка 4 и 5 датчиков смещения 2 и 3 механически сопряжены с подпружиненными штоками 14 и 15. расположенными перпендикулярно друг другу и, оба перпендикулярно оси эксцентрического диска 16. Диск 1 в закреплен на одной оси с роликом 17, который соприкасается с повер- хностью 18 контролируемого объекта. Излучатели 6, 8,10 и 12, а также фотоприемники
7,9, 11 и 13 соединются электрически с входом блока преобразования 19, а выход блоха 19 информационно связан с,о входом блока обработки 20, который вычисляет текущее положение датчика. Штоки 14 и 15 для устранения люфта снабжены пружинами 21, Диск 16 выполнен в виде цилиндрического кулачка, эксцентрично закрепленного на оси вращения ролика 17. Электронный блок преобразования 19 содержит питание излучателей и усилитель, осуществляющий масштабное преобразование сигналов с выхода попарно-дифференциально включенных фотоприемников 7 и 9, 11 и 13 для согласования их со входом блока обработки 20, который предназначен для осуществления математических операций с целью получения информации об измеряемом перемещении путем соответствующей обработки сигналов с вы- хода электронного блока 19 и может представлять собой микропроцессорное устройство или ПЭВМ, В исходном состоянии при отсутствии перемещения корпуса 1 датчика относительно поверхности 18 што- ки 14 и 15 неподвижны. При этом степень деформации витков участков волоконных световодов 4 и 5 не изменяется, светопро- пускание их остается постоянным, неизменными остаются и сигналы с выходов фотоприемников 7. 9, 11, 13. В блоке обработки 20 фиксируется исходное значение начальной координаты датчика.
Датчик перемещения работает следующим образом.
При появлении перемещения корпуса 1 датчика относительно поверхности 18 ролик 17 без проскальзывания катится по поверхности 18, преобразуя линейное перемещение корпуса 1 во вращательное движение диска 16. Вращение диска 16 приводит к возвратно-поступательному г1еремещению штоков 14 и 15, воспринимающие торцы которых с помощью пружины 21 прижимаются к поверхности диска 16.
Возвратно-поступательное перемещение штоков 14 и 15 вызывает периодическую знакопеременную деформацию витков участков волоконных световодов 4 и 5 датчиков смещения 2 и 3, что приводит к соответствующему изменению светопропу- скания последних и к изменению дифференциального сигнала на выходе фотоприемников 7 и 9, 11 и 13. Выбранное расположение и конструкция датчиков сме- щения 2 и 3 обеспечивают то, что сигналы с выхода электронного блока преобразования 19 при линейном перемещении корпуса 1 относительно поверхности 18 представляют собой напряжения, величина которых из- меняется по закону синуса и косинуса в зависимости от перемещения соответственно штоков 14 и 15.
Блок обработки 20 преобразует электрические сигналы с выхода блока 19 в коор- динату текущего положения корпуса 1 датчика относительно поверхности 18.
Перпендикулярное расположение датчиков перемещения 2 и 3 друг относительно друга и перпендикулярно оси диска 16 позволяет измерять величину перемещения и определять направление перемещения.
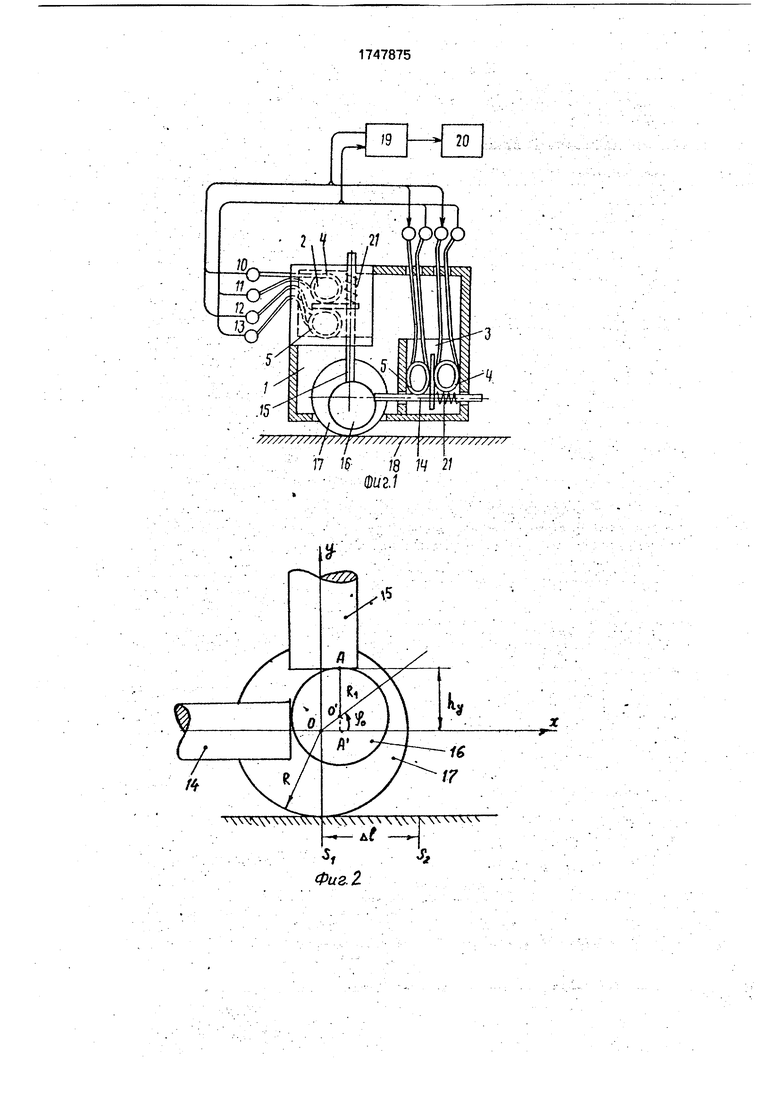
Для пояснения принципа работы датчика перемещения получим его функцию преобразования (фиг. 2).
Ролик 17 радиусом R без скольжения катится по поверхности 18. На одной оси О с роликом 17 закреплен диск 16. Смещение (эксцентриситет) оси вращения диска относительно его геометрической оси 0 равна а, а радиус диска 16 равен RL
Точку соприкосновения диска 16 и воспринимающего торца штока 15 обозначим А, расстояние от торца оси OX-hy. а угол между ОО и ОХ через р0 . Тогда: + a. .
При перемещении ролика 17 вправо из положения Si в положение Зг на малое расстояние А ролик 17 повернется по часовой стрелке на малый угол . при этом воспринимающий торец штока 15 переместится на малую высоту A hy. Величина
AAI оAt
2jrTT W радианТогда величина Ahy определяется выражением:
Any a (sin ( (pQ+ Ay)-sin p0 ) 2a-sln
А ( 2 р0 + Доз ) Дуз-cos ,
Для штока 14, расположенного перпендикулярно штоку 15, расстояние от торца до оси Оу обозначим h Тогда,
hx Ri-a cos (p0
А малое изменение этого расстояния A hx при перемещении ролика 17 из положения Si в положение S будет:
Ahx -a(cos( po+ )-cos ) 2a. sin { ysln
Если теперь взять отношение А пу к A hx то получим:
Ahy/A hx tg( );
Без нарушения общности, можно считать, что в исходном состоянии р0 0, Тогда имеем:
A hy/A hx ;
Отсюда получим выражение для величины малого перемещения Д1:
A 2Rarctg (1)
Таким образом малое перемещение А I корпуса 1.относительно поверхности 18 могут быть измерены путем пересчета малых перемещений штоков 14 и 15 по формуле (1).
Можно предположить, что для измерения перемещения Д| достаточно измерять перемещение одного из штоков 14 и 15 (только А Их или только Ahy). Однако, поскольку в области максимумов (миниму- мов)функций sin p или cos p изменение аргумента р на + Ду приводит к изменению функции одного знака, это не дает возможности определять направление перемещения корпуса 1 или знак приращения А.
Вычисление же арктангенса позволяет определять направление и величину вектора перемещения.
Большие перемещения AL вычисляются накопителем, интегрированием (цифровым или аналоговым) малых перемещений Д1.
AL LO + j Ah.
i 1.
(2)
Или
при воздействии на него электрических помех, поскольку источник излучения, фотоприемники и электронная схема полностью вынесены за пределы преобразователя на
длину оптических волоконных линий, которая может достичь несколько сотен метров. В данном устройстве возможно определение положения контролируемого объекта при любом, в том числе, и реверсивном,
перемещении объекта. Это устройство позволяет непрерывно определять текущие угловые положения измерительного ролика, также и в том случае, когда ролик неподвижен, что существенно для введения попрзвок на угловые положения в случае эксцентриситета измерительного ролика.
Таким образом, предложенный датчик позволяет избежать снижения точности измерения перемещения.
В реализованном макете датчика получен диапазон измерения перемещения от О до 400 мм с погрешностью, не превышающей 1%


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И РАСХОДА ЖИДКОСТИ | 1992 |
|
RU2043604C1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК МАГНИТНЫХ ПОЛЕЙ | 1999 |
|
RU2157512C1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЭЛЕКТРИЧЕСКОГО ТОКА | 1999 |
|
RU2170439C1 |
| ОПТИЧЕСКИЙ ДЕТЕКТОР РАЗНОСТИ ДАВЛЕНИЙ | 2013 |
|
RU2547896C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ТОКА | 2022 |
|
RU2785967C1 |
| ОПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2223462C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УГЛА ПОВОРОТА | 2005 |
|
RU2290606C1 |
| ПРИБОР ТРЕХОСНОЙ ОРИЕНТАЦИИ НА СОЛНЦЕ | 1995 |
|
RU2127421C1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК РАЗНОСТИ ДАВЛЕНИЯ | 2013 |
|
RU2567176C2 |
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений. Целью изобретения является повышение точности при воздействии дестабилизирующих факторов Вращение диска 16 при измерении переме- щений приводит к возвратно-поступательному перемещению штоков 14 и 15, которое регистрируется посредством двух пар воло конно-оптических датчиков 2 и 3 смещения. По сигналам с выходов волоконно-оптических датчиков электронный блок 20 определяет величину перемещения. 2 ил.
tn
(2а)
AL U+ / Ai(t)dt, tu
где Lo - начальное, исходное значение координаты положения корпуса 1 датчика относительно поверхности 18;
п - количество отсчетов элементарных перемещений Ah ;
to - начальный момент времени;
tn - момент времени отсчета положения датчика.
Таким образом, имея линейную зависимость напряжения на выходе блока преобразования 19 от положения воспринимающих торцов перпендикулярно расположенных штоков 14 и 15, с помощью блока обработки 20 вычисляются текущие координаты положения корпуса 1 датчика относительно поверхности 18, т.е. измеряемое перемещение.
Сравнительный анализ предлагаемого решения и известного позволяет выявить следующие преимущества предлагаемого.
В предлагаемом решении отсутствует дорогостоящая и сложная в изготовлении инфракционная решетка. Кроме того, оптические каналы волоконно-оптического преобразователя полностью изолированы от воздействия среды.
Предлагаемое устройство может быть использовано в пыльных, агрессивных взрыво- и пожароопасных средах, а также
25
Формула изобретения
Волоконно-оптический датчик перемещений, содержащий корпус, ролик, установленный в корпусе с возможностью поворота
вокруг своей оси, датчик угла поворота, кинематически связанный с роликом, блок обработки, вход которого подключен к выходу датчика угла поворота, отличающий с- я тем, что, с целью повышения точности.
датчик угла поворота выполнен в виде диска, эксцентрично скрепленного с роликом, двух штоков, установленных в корпусе с возможностью смещения вдоль оси их симметрии так, что эти оси перпендикулярны друг
другу и оси поворота ролика, двух пар волоконно-оптических датчиков смещения, каждая из которых сопряжена с соответствующим штоком, выходы волоконно-оптических датчиков в каждой паре подключены к соответствующим входам блока обработки по дифференциальной схеме, а каждый волоконно-оптический датчик выполнен в виде волоконного световода с мно- говитковым участком, излучателя,
оптически связанного с входным торцом волоконного световода, и фотоприемника, оптически связанного с выходным торцем волоконного световода.
777/7//7/7/Г7/7F//7/77777/ т/У/,г/////////
17 W 18 14 21
Фиг./
| Патлах А.Л.и др | |||
| Волоконный датчик линейных перемещений | |||
| Информационный листок о научно-технических достижениях КАЗНИИНТИ, N 88-27, стр | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Иванов Б Н | |||
| Измерение линейных размеров методом обкатывания роликом | |||
| М.: Машиностроение, 1973, стр | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
