Изобретение относится к учебным средствам обучения и может быть использовано для демонстрации траектории с постоянным углом сближения самоходного подводного аппарата с кораблем-целью.
Цель изобретения - расширение диапазона решаемых задач путем построения траектории сближения с постоянным углом самоходного подводного аппарата с кораблем-целью.
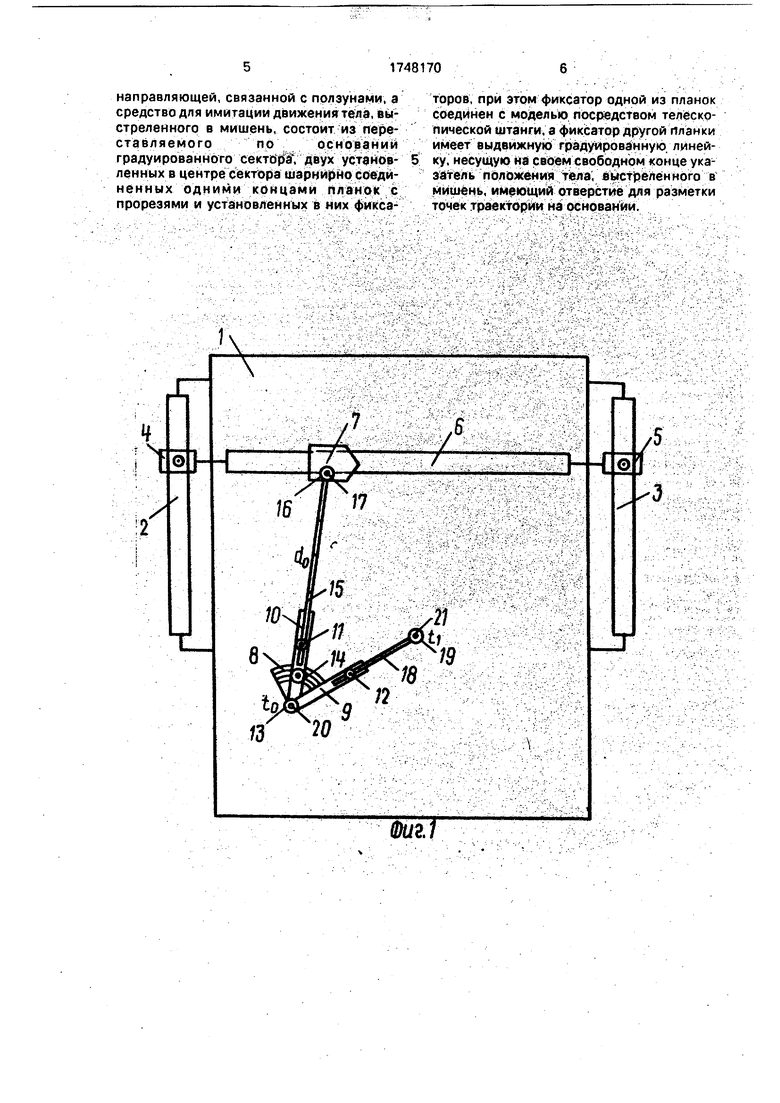
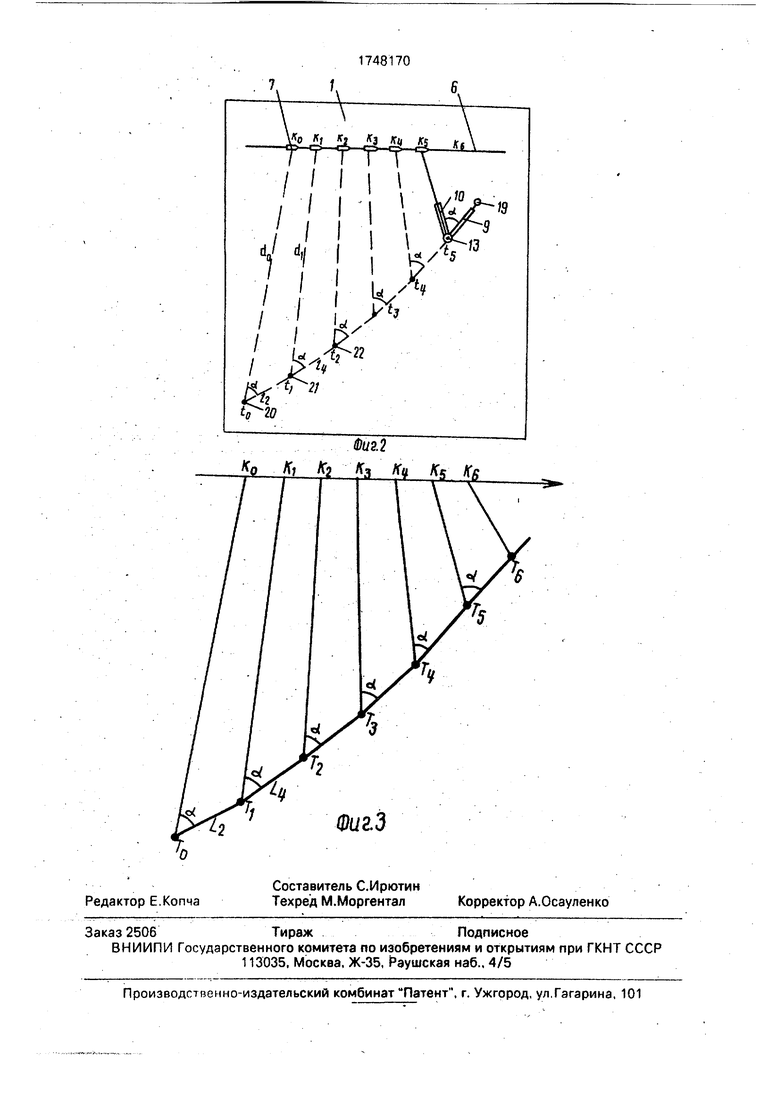
На фиг. 1 схематически изображен учебный прибор по механике; на фиг. 2 - схема работы устройства; на фиг. 3 - схема графического построения траектории сближения с постоянным углом самоходного подводного аппарата с кораблем-целью.
Учебный прибор содержит вертикальное основание 1 (например, деревянный щит), вертикальные направляющие 2 и 3 с ползунами 4 и 5. к которым присоединена горизонтальная направляющая 6 с моделью 7 корабля-цели, и средство для имитации движения тела в мишень, состоящее из градуированного сектора 8. планок 9 и 10 с прорезями и установленных в них фиксаторов 11 и 12. Одни концы планок 9 и 10 соединены при помощи шарнира 13, установленного в центре сектора 8. имеющего прорезь, с которой взаимодействует винт 14. Фиксатор 11 соединен с моделью 7 телескопической штангой 15 при помощи кольца 16, надетого на крючок 17 модели 7 Фикса sj
Јь 00
vj О
тор 12 имеет .выдвижную градуированную линейку 18, несущую на своем свободном конце указатель 19, имеющий отверстие для разметки на основании 1 точек траектории движения самоходного подводного аппара- та к кораблю-цели. Для построения траектории используют штыри 20, которые вставляют в отверстия шарнира 13 и указателя 18.
Работа с учебным прибором осуществ- ляется следующим образом.
Монтируют элементы и узлы прибора (фиг. 1), приняв расстояние D md(K0T0 mMo), где m - линейный масштаб; D - расстояние между самоходным подводным ап- паратом и кораблем-целью в момент пуска его под углом по направлению ToTi (фиг. 3); d - длина планки 10 с телескопической штангой 15, равное расстояние от точки to (соответствующей точке Т0) до модели 7 (со- ответствующей точке К0).
Так как самоходный подводный аппарат при сближении с кораблем-целью под управлением системы самонаведения сохраняет постоянный угол (образованный продольной осью аппарата и направлением на корабль-цель), то планки 9 и 10 длиной d устанавливают при помощи градусной шкалы сектора 8 на угол а и фиксируют на все время работы их зажимным винтом 14.
Затем одевают кольцо 16 на крючок 17 модели 7, а в отверстие шарнира 13 вставляют штырь 19 и закрепляют его на основании 1, обозначая точку t0.
По известным скоростям vi хода кораб- ля-цели и аппарата определяют отрезки пути U и L.2, которые они проходят за время ATi АТ2. т.е. Li vi ATiHL.2 v2 ДТа. Длину планки 9 с линейкой 17 берут равной
, L2
отрезку пути г- - toti, в отверстия указателя 18 вставляют штырь 20 и закрепляют его на основании 1, обозначая точку ц. Таким образом, получают соответствующий отрезок пути самоходного подводного аппа- рата за время ДТ2.
Так как за время ATi А Т2 корабль- цель переместится в точку, пройдя расстояние Li, то модель 7 перемещают по
Li
направляющей 6 на расстояние п - ,
Шарнир 13 с сектором 8 и планками 9 и 10 снимают со штыря 19 крючка 17, одевают его своим отверстием на штырь 20.
При этом перемещением фиксатора 11 и сокращением телескопической штанги 15 устанавливают колоьцо 16 на крючок 17, т.е. длина планки 10 со штангой 15 в этом случае
будет равна di. Если скорость va самоходного подводного аппарата осталась неизменной, то аппарат за время А Т2 А Т4 пройдет Ц V2 А ТА и окажется в точке Т2.
Так как этот отрезок соответствует U - 2,
то в отверстие указателя 19 вставляют штырь 22 и получают точку t2, соответствующую точке Т2, а значит, и отрезок траектории движения аппарата (U U,l4 h -1112).
Так поступают до тех пор, пока линейка 18 не ляжет на направляющую 6 (т.е. курс корабля-цели). При этом указатель 19 будет указывать положение самоходного аппарата относительно корабля-цели, а штыри 20, 21, 22,... - отрезки его траектории при сближении с постоянным углом,
Если корабль-цель идет зигзагом, то при помощи передвижения горизонтальной направляющей по вертикальным направляющим 2 и 3 располагают модель 7 в соответствующих точках, а планки 9 и 10 ориентируют соответствующим образом.
Если корабль-цель меняет скорость во время движения, то на направляющей 6 откладывают соответствующие участки пути.
Использование предлагаемого учебного прибора позволяет построить траекторию сближения с постоянным углом; демонстрировать взаимное положение корабля-цели и самоходного подводного аппарата в процессе сближения; демонстрировать влияние изменения скорости и положения корабля-цели на форму траектории сближения с постоянным углом; сократить время курсового и дипломного проектирования; повысить усвояемость материала курсантами при чтении лекций.
Таким образом, предлагаемый учебный прибор по механике обеспечивает расширение диапазона решаемых задач, а также по- вышение эффекта наглядности при построении траектории сближения с постоянным углом самоходного подводного аппарата с кораблем-целью,
Формула изобретения
Учебный прибор по механике, содержащий вертикальное основание с горизонтальной направляющей, мишень и средство для имитации движения тела, выстреленного в мишень, отличающийся тем. что, с целью расширения диапазона решаемых задач путем построения траектории сближения с постоянным углом самоходного подводного аппарата с кораблем-целью, он имеет две вертикальные направляющие с ползунами, мишень выполнена в виде модели цели, установленной на горизонтальной
направляющей, связанной с ползунами, а средство для имитации движения тела, выстреленного в мишень, состоит из переставляемогопооснованииградуированного сектора, двух установленных в центре сектора шарнирно соеди- ненных одними концами планок с прорезями и установленных в них фиксаторов, при этом фиксатор одной из планок соединен с моделью посредством телескопической штанги, а фиксатор другой планки имеет выдвижную градуированную линейку, несущую на своем свободном конце указатель положения тела, выстреленного в мишень, имеющий отверстие для разметки точек траектории на основании.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для снятия мерок с фигуры человека | 1978 |
|
SU1039477A1 |
| Устройство для определения положенияКОНСТРуКТиВНыХ ТОчЕК шВЕйНОгОплЕчЕВОгО издЕлия | 1979 |
|
SU820791A1 |
| Прибор для графического построения моделей обуви | 1976 |
|
SU651978A1 |
| САМОХОДНЫЙ ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ | 2017 |
|
RU2688562C1 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| Устройство для решения задач оптимизации | 1985 |
|
SU1309045A1 |
| Прибор для построения лекал деталей одежды | 1979 |
|
SU785064A1 |
| ЧЕРТЕЖНЫЙ ПРИБОР | 1967 |
|
SU201149A1 |
| ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ ЭЛЛИПСОВ | 1968 |
|
SU221949A1 |
| ЧЕРТЕЖНЫЙ ПРИБОР ДЛЯ ВЫЧЕРЧИВАНИЯ ОРТОГОНАЛЬНЫХ И ЦЕНТРАЛЬНЫХ ПРОЕКЦИЙ ОБЪЕКТА | 1973 |
|
SU394241A1 |
Изобретение относится к учебным средствам обучения и может быть использовано для демонстрации траектории сближения с постоянным углом самоходного подводного аппарата с кораблем-целью, Цель изобретения - расширение диапазона решаемых задач путем построения траектории сближения с постоянным углом самоходного подводного аппарата с кораблем-целью. Прибор содержит вертикальное основание с двумя вертикальными направляющими с ползунами. К ползунам присоединена горизонтальная направляющая с мишенью, выполненной в виде модели корабля- цели Средство для имитации движения тела, выстреленного в мишень, состоит из переставляемого на основании градуированного сектора, двух установленных в центре сектора шарнирно соединенных одними концами планок с прорезями и установленных в них фиксаторов. При этом фиксатор одной из планок соединен с моделью телескопической штангой, а фиксатор другой планки имеет выдвижную градуированную линейку . Линейка имеет на своем свободном конце указатель положения тела, выстреленного в мишень, для разметки точек траектории на основание. 3 ил. w Ё
5
Фиь1
4д.
Т
I I I
I I /
v d / i U
jX
/ №
21
Ч W
Фиг.2 4fl-ft fofa ft Ks Кк
Фиг.3
| Учебный прибор по физике | 1988 |
|
SU1517057A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
