параметров оптимальной траектории. Устройство содержит первую линейку. 1 со шкалой, на которой расположен первый ползунок 2 с фиксатором 3, снабженный первым секторным выступом 4 с градусной шкалой, поворотную планку 5 с продольной прорезью, соединенную с первым ползунком 2 соосно с первым секторным выступом 4 и со- держ ащую второй ползунок 6 с фиксатором 7, вторую линейку 8 со шкалой, на которой расположены второй ползуИзобретение относится к устройствам дпя решения баллистических задач по определению параметров оптимальной траектории и может найти применение при проведении конструкторских расчетов в проектных организациях, а также может быть использовано в учебном процессе технических ВУЗов при проведении практических занятий по баллистике летательных аппаратов.
Целью изобретения является расширение класса решаемых задач за сче оперативного решения баллистических задач по определению параметров оп-. тимапьной траектории.
На фиг. 1 изображено предпагаемое
устройство; на фиг. 2 - схема эллиптических траекторий.
Устройство, содержит первую линейку 1 со шкалой, на которой расположен первый ползунок 2 с фиксатором 3, снабженный первым секторным выступом с градусной шкалой 4, поворотную планку 5 с продольной прорезью, соединенную с первым ползуном 2 соос но с первым сектором 4 второй ползунок 6 с фиксатором 7, вторую линейку 8 со шкалой, на которой расположен второй ползунок 6, второй секторный выступ 9 с градусной шкалой, непод- йижно скрепленньш с первой линейкой 1, при этом обе линейки подвижно скреплены в точке, совпадающей с центром второго секторного выступа 9, и имеют фиксатор 10 их взаимного положения. Устройство также содержит стрелочный указатель 11, кинематинок 6, второй секторньй выступ 9 с градусной шкалой, неподвижно скрепленные в точке, совпадающей с центром второго секторного выступа 9, и имеющие фиксатор 10 их взаимного углового положения. Устройство также содержит стрелочный указатель 11, кинематически связанный с помощью скользящей по указателю обоймы 12 и двух равноплечих звеньев 13 и 14 соответственно с первым ползунком 2 и поворотной планкой 5. 2 ил.
2
чески связанный с помощью скользящей, по указателю обоймы 12 и двух равноплечих звеньев 13 и 14 соответственно с первым ползунком 2 и поворотной; 5 планкой 5.
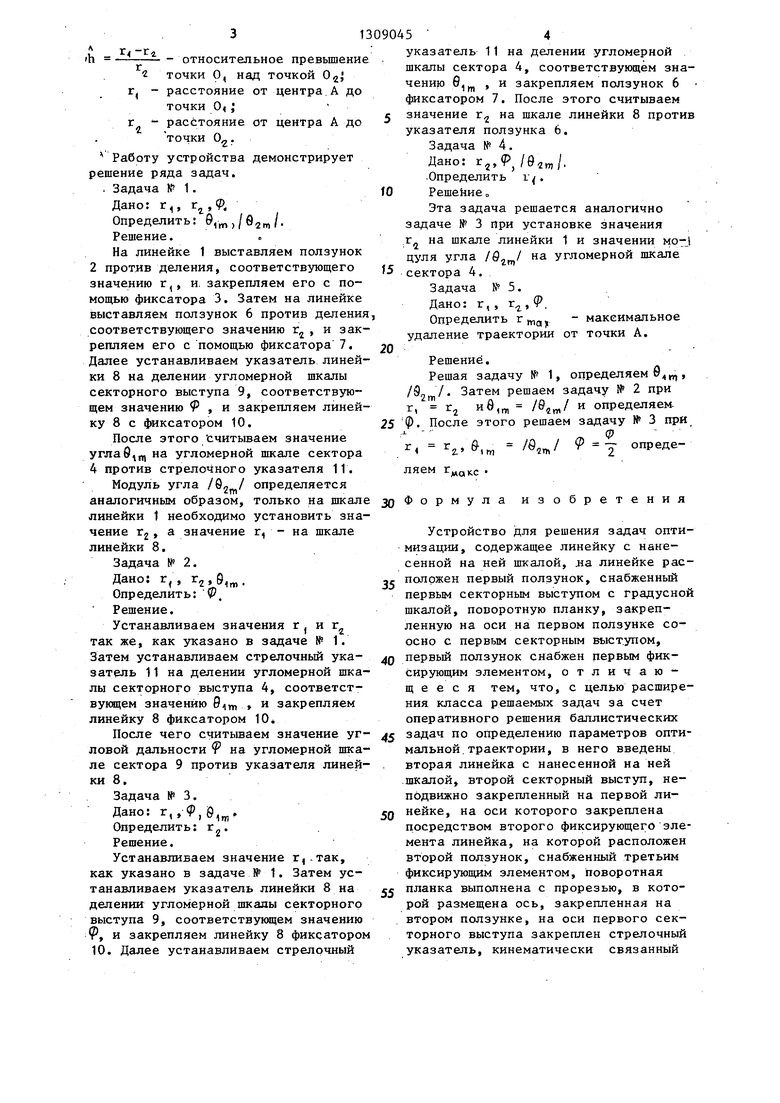
Изобретение основывается на известных свойствах эллиптических тр а- екторий (фиг. 2).
fO Направление минимальной начальной скорости V,, обеспечивающей попадание точки S из точки О, в Oj, делит пополам угол, составляемый в точке О, вертикалью и направлением на точ15 ку падения 0,.
Касательная в точке 0 к эллиптической траектории, отвечающей мини- магшной начальной скорости, делит пополам угол, составляемьш в этой
20 точке вертикалью и направлением на точку 0.
Устройство реализует зависимости, связывающие параметры траектории 25 максимальной дальности и минимальной скорости
tg29,
2tgФ/2
id)
30
2 + h,(r+
/9.„/
/2 - (9, + (р/2),
(2)
где &
im
- оптимальный угол бросания, соответствующий максимальной дальности при минимальной скорости V.
4т
2т
угол падения эллиптической траектории, отвечающей минимальной скоростиi
4 i
h относительное превышение
2 точки О, над точкой г, - расстояние от центра.А до
точки О,,
г - расстояние от центра А до точки 0.
Работу устройства демонстрирует решение ряда задач.
Задача № 1. Дано: г
1
.Ф.
Определить Г0,,/в2„/.
Решение.
На линейке 1 выставляем ползунок 2 против деления, соответствующего значению г,, и. закрепляем его с помощью фиксатора 3. Затем на линейке выставляем ползунок 6 против деления соответствующего значению г , и закрепляем его с помощью фиксатора 7. Далее устанавливаем указатель линейки 8 на делении угломерной шкалы секторного выступа 9, соответствующем значению Ф , и закрепляем линейку 8 с фиксатором 10.
После этого считываем значение углабд, на угломерной шкале сектора 4 против стрелочного указателя 11.
Модуль угла /02т/ определяется аналогичным образом, только на пжале линейки 1 необходимо установить значение Г2 , а значение г, - на шкале линейки 8.
Задача № 2.
Дано: г., г.б
Чго
Определить: Р. Решение. Устанавливаем значения
и г„
( 2
так же, как указано в задаче № 1. Затем устанавливаем стрелочный указатель 11 на делении угломерной шкалы секторного выступа 4, соответст- вукяцем значению бцт, , и закрепляем линейку 8 фиксатором 10
После чего считьшаем значение угловой дальности на угломерной шкале сектора 9 против указателя линейки 8.
Задача № 3.
Дано: г,,Ф,9,.
Определить: г.
Решение.
Устанавливаем значение г,-так, как указано в задаче № 1. Затем устанавливаем указатель линейки 8 на делении угломерной шкалы секторного выступа 9, соответствукнцем значению ф, и закрепляем линейку 8 фиксатором 10. Далее устанавливаем стрелочный
O
5 0 5
о
указатель 11 на делении угломерной шкалы сектора 4, соответствующем значению б, , и закрепляем ползунок 6 фиксатором 7. После этого считываем значение г на шкале линейки 8 против указателя ползунка 6. Задача № 4.
Дано: г,,.
Определить г.
Решение„
Эта задача решается аналогично задаче № 3 при установке значения г на шкале линейки 1 и значении цуля угла /Sjn,/ на угломерной шкале сектора 4.
Задача № 5.
Дано: г,, г,Р.
Определить - максимальное удаление траектории от точки А.
Решение.
Решая задачу № 1, определяем 0 , . Затем решаем задачу 2 при г, г,2 и8, ,/ и определяем, ф. После этого решаем задачу № 3 при
i .m m/ -2 опредег. im ляем
о
5
0
5
0
5
Формула изобретения
Устройство для решения задач оптимизации, содержащее линейку с нанесенной на ней шкалой, ла линейке расположен первый ползунок, снабженный первым секторным выступом с градусной шкалой, поворотную планку, закрепленную на оси на первом ползунке со- осно с первым секторным выступом, первый ползунок снабжен первым фиксирующим элементом, отличающееся тем, что, с целью расширения класса решаемых задач за счет оперативного решения баллистических задач по определению параметров оптимальной, траектории, в него введены вторая линейка с нанесенной на ней .шкалой, второй секторный выступ, неподвижно закрепленный на первой линейке, на оси которого закреплена цосредством второго фиксирующего элемента линейка, на которой расположен второй ползунок, снабженный третьим фиксирующим элементом, поворотная планка выполнена с прорезью, в которой размещена ось, закрепленная на втором ползунке, на оси первого секторного выступа закреплен стрелочный указатель, кинематически связанный
513090456
с помощью скользящей по стрелочному звеньев соответственно с первым пол- указателю обоймы и двух равноплечих зунком и поворотной планкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для графического решения задач | 1984 |
|
SU1171810A1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ | 1990 |
|
RU2028667C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК КЕПЛЕРОВСКИХ ТОЧЕК И РЕШЕНИЯ ЗАДАЧ В ПРОЕКЦИЯХ СФЕРЫ | 1990 |
|
RU2022357C1 |
| Устройство для графического решения задач | 1987 |
|
SU1472922A1 |
| Устройство для преобразования угловых координат | 1986 |
|
SU1372334A1 |
| ВОЕННЫЙ ТРАНСПОРТИР | 2017 |
|
RU2653586C1 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| Прибор для расчета электрических цепей СВЧ | 1982 |
|
SU1049924A1 |
| Вычислительный прибор для определения установочных геометрических параметров | 1980 |
|
SU935974A1 |
| Прибор для построения подеры эллипса | 1980 |
|
SU910472A1 |
Изобретение относится к области устройств для решения балхшстических задач по определению параметров оптимальной траектории. Цель изобретения - расширение класса решаемых задач за счет оперативного решения баллистических задач по определению 1(Л со о со о Jiiik СП г.1
Л
фиг 2
Редактор А.Ворович
Составитель З.Шершнева
Техред М.Хйданич Корректор М.Демчик
1800/42
Тираж 673Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВИАЦИОННЫХ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2012 |
|
RU2517264C2 |
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Устройство для графического решения задач | 1984 |
|
SU1171810A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
