Изобретение относится к счетным устройствам корабельной штурманской службы. Известен прибор для определения элементов движения встречных судов, обнаруженных с помощью радиолокатора (авт. св. № 157799). Такой прибор не позволяет непосредственно рассчитывать маневр судна, предотвращающий столкновение с встречными судами.
Штурманский прибор предложенной конструкции имеет закрепленный на линейке дальности сектор, например в 180°, из прозрачного материала, иа который в процессе решения задач переносятся точки положения встречных судов, а также фиксирующее устройство, сцепляющее и расцепляющее линейку дальности с фигурной осью, перемещающейся в пазу подвижной планки. Новая усовершенствованная конструкция предусматривает возможность решения задачи на маневрирование, обеспечивающее расхождение с другими судами на безопасном расстоянии.
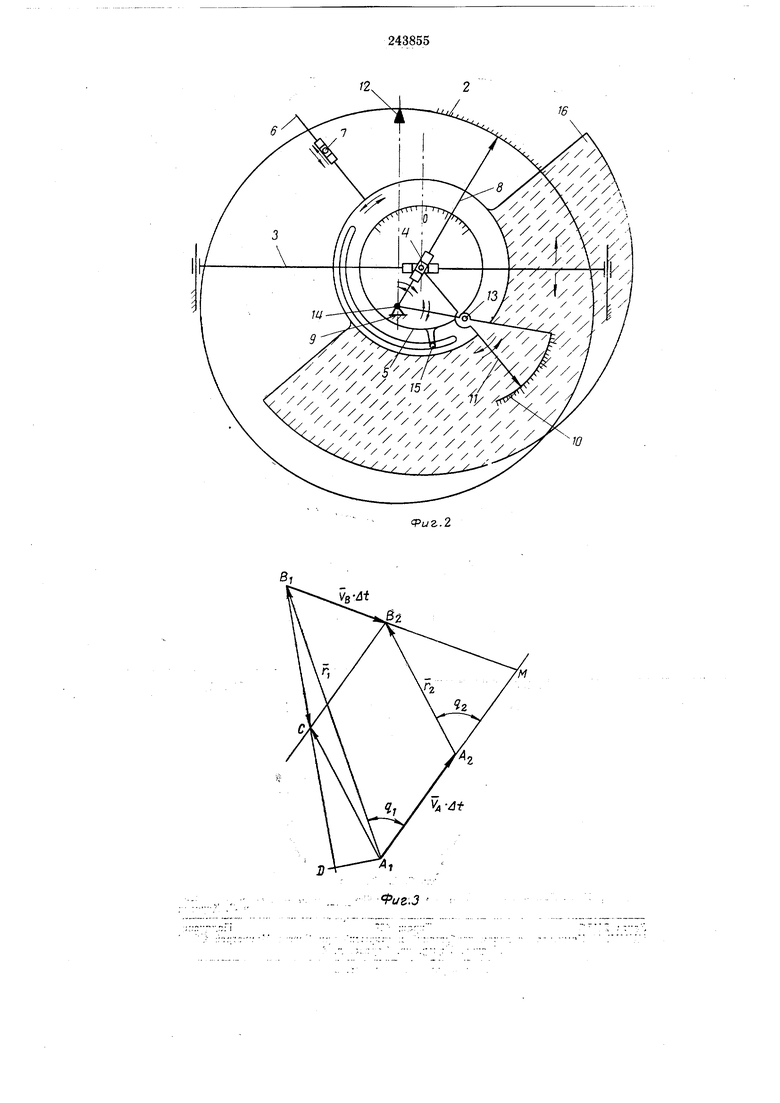
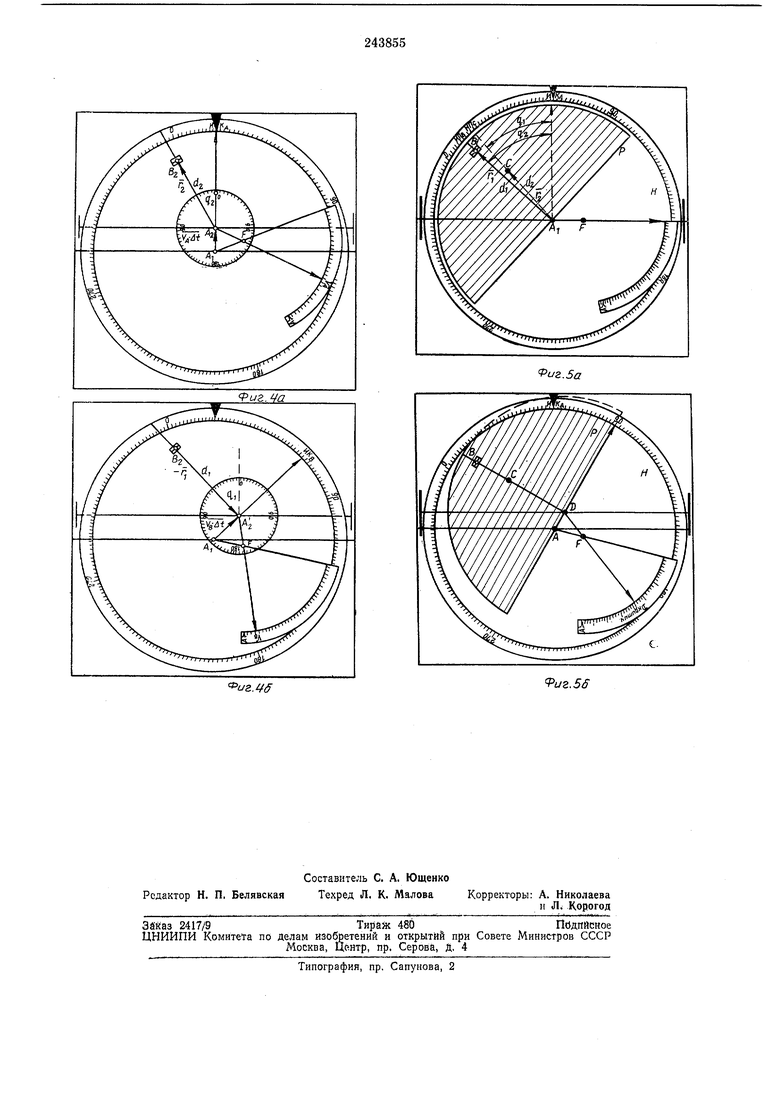
На фиг. 1 изображен общий вид прибора; на фиг. 2 - кинематическая схема прибора; на фиг. 3 показан общий принцип решения задач (векторная схема); на фиг. 4а, 46- примеры решения задачи выбора маневра для расхождения на данной дистанции с одним или несколькими судами; на фиг. 5а, 56 - примеры определения курса и скорости встречного судна.
Корпус 1 штурманского прибора состоит из двух половин: верхней и нижней. Для отсчета курса судов и пеленгов картушка 2 разбита на 360°. Фигурная планка 3 с внутренним папазом имеет поступательно-возвратное движение. В пазу этой планки перемещается фигурная ось 4 с ползунком. Картушка 5, предназначенная для отсчета курсовых углов от О до 180° левого борта и правого борта, жестко скреплена с нижней частью ползуна фигурной оси 4. Линейка дальности 6 с нанесенными на нее шкалами для отсчета расстояний до встречного судна и визиром для отсчета курсовых углов свободно поворачивается вокруг нижнего конца фигурной оси 4 или жестко соединяется с ней посредством фиксирующего устройства. Фиксатор 7 с визиром, свободно перемещающийся в пазу линейки дальности, служит для фиксации положения встречного судна. Стрелка, 8 показывает курс судна (своего или встречного). К планке 9 прикреплена ось вращения стрелки 8 и шкалы W скорости и дистанции кратчайшего сближения, проградуированная в узлах и милях. Стрелка // показывает скорость судна и дистанцию кратчайшего сближения. Курс судна, отсчитываемый по вращающейся картушке 2, устанавливается против индекса 12. Ось 13 связывает шкалу 10 со стрелкой 11. Цифрой 14 обозначена ось вращения стрелки курса и шкалы скорости. Стопорный винт 15 предназначен для жесткого соединения линейки дальности с осью 4. На сектор 16 в 180°, выполненный из тонкого оргстекла и жестко скрепленный с линейкой дальности, в процессе решения задач переносятся точки иолол ения встречных судов. Для нанесения точек положения встречных судов с нанесенными на него кольцами дальности в масштабе шкал линейки дальности применяется тонкий белый картон или пластик (17}. Действие прибора базируется на гипотезе равномерно-прямолинейного движения всех рассматриваемых судов. Полол ение рассматриваемого судна считывается с радиолокатора через фиксированный промежуток времени, например, через 3 мин производится второй отсчет. Результаты этих отсчетов наносят на прибор и иижеописанными приемами определяют искомые величины. На приведенных схемах приняты следующие обозначения: Ai - изображение в некотором масштабе положения собственного судна в момент первого отсчета, соответствующее центру радиолокатора;AZ - изображение в том же масштабе иоложения собственного судна в момент второго отсчета; BI - изображение положения другого судна в момент первого отсчета; BZ - изобрал ение полол ения другого судна в момент второго отсчета в системе неподвижных координат; С - изобрал :ение того же судиа в момент второго отсчета, отнесенное к собственному судну, - второй отсчет по радиолокатору; q, q-2 - курсовые углы другого судна в момент первого и второго отсчета; d-i; do - дистанция до другого судна в те моменты; VA - вектор скорости собственного судна в масштабе, соответствующем масштабу полол ений;VB - вектор скорости другого судна; ri, f2 - радиус-вектор, нроведенный из своего судна к другому судну в момент первого и второго отсчетов. Если в момент первого отсчета суда находились в точках А и BI (см. фиг. 3), а в момент второго отсчета в точках Ло и Ва, то Г1 +УЛ . Д f 1/л А + -а Поскольку At величина постоянная, на шкалах отсчитываются непосредственно значения VA и VB. AiM - путь движения собственного судна; - цуть движения другого судна; - относительная траектория другого судиа или в соответствующем масштабе - траектория движения изображения встречного судна на радиолокаторе. Решение всех задач предложенным прибором сводится к механическому воспроизведению приведенной на фиг. 3 векторной схемы, при этом в задачах на определение элемеитов встречных судов и расстояния кратчайшего сблилсения считаются известными курс и скорость собственного судиа (вектор VA -АО строится вектор А вырал аюший двилсение встречного судна, и отрезок /liD, отобрал ающий расстояние кратчайшего сблил ения. В задачах на выбор маневра известными считаются курс н скорость встречного судна и его положение относительно собственного судиа, ищется курс и скорость собственного судиа (вектор VA А i}. Механизм действия предлолсениого прибора показаи на фиг. 2. т Началом координат точка 14 (ось вращения стрелки курса и шкалы скорости). Начальным направлением, например, курсом собственного корабля, служит линия, соединяющая точки 12-14. Для привязки этого направления к компасному курсу подвил ная картушка 2 ставится соответствующим делением против индекса 12. Фигурная иланка 3 может перемещаться только в направлении, параллельном линии 12-14, а фигурная ось 4 - вдоль планки в перпендикулярном направлении. Расстояние мелсду точками 14-4 показывает стрелка 11 по шкале 10. На картушке 5, неподвил но связанной с осью 4, деления раснолол ены от нуля в обе стороны до 180°. Вокруг оси 4 может поворачиваться линейка дальности б, несущая фиксатор 7 с визиром, предназначенным оставлять отметки па картоне в поддоие прибора. Кроме того, для напесения отметок сектор 16 в 180°, скрепленный с линейкой дальности. Стрелка 8 показывает компасный курс направления между точками 14-4. Конструктивно прибор выполнен в виде корпуса с круглым отверстием вверху и гнездом для картона или пластика 17, несущего сетку окрул ностей, концентричных с осью 14, служащих для непосредственного отсчета расстояний от начала координат. В корпусе установлена картушка 2, поворачиваемая от руки для установки деления против индекса 12. Неподвижно закреилепиая в корпусе илаика 3 несет ось 14; диск с прорезью линейки дальности 6 расположен иод картушкой 5 и молсет с ней скрепляться винтом 15. Линейка дальности имеет продольиую прорезь, по которой производится отсчет углов и через которую проходит отметчик. Нрибор предлолченной конструкции позволяет определять курс и скорость встречного судна и расстояние кратчайшего сблил ения с ним так , как прибор по авт. св. № 157799, и, кроме того, осуществлять выбор маневра для расхождения на заданной дистанции с
картушку 2 курса устанавливают так, чтобы против индекса 12 отсчитывался курс своего судна (Я/Сд). Стрелка отсчета курса также ставится против индекса 12, стрелка // скорости и дистанции кратчайшего сближения устанавливается на нуль шкалы W.
При обнаружении с помощью радиолокационной станции встречного судна определяются дистанция до него fl(i и курсовой угол 9i (или пеленг ИПв}.
Через 3 мин, 6 мин, 12 мин (в зависимости от конкретных условий) вторично определяются d-2 и q-2 (или пеленг ИПс).
Линейка дальности ставится в положение, при котором против визира, нанесенного на ней, отсчитывается курсовой угол 7i первого определения встречного судна. Карандашом через паз в линейке дальности на картоне 17 ставится точка BI против деления шкалы линейки дальности, соответствующего дистанции первого определения встречного судна.
Таким образом, от точки А, откладывается вектор гь Таким же образом, зная dz и я (или ИПс), отмечается на картоне точка С. На картоне от точки AI отложены векторы YI и Г2. Вращая линейку дальности, накрывают точки BI и С сектором 16 и стопорным винтом 15 жестко скрепляют линейку дальности с картушкой курсовых углов. Затем, смещая иланку 3, устанавливают стрелку скорости в такое ноложение, при котором она показывает но шкале скорости W скорость своего судна, т. е. вводят вектор Уд Д. После этого переносят точку BI на сектор 16. Смещая подвижную систему прибора, а следовательно и точку AS, наблюдают за направлением вектора (при этом точка С, нанесенная на картоне, остается неподвижной, а точка 5i, нанесенная на прозрачный сектор 16, смещается).
Вектор BjC в этом случае является вектором относительного движения судна В и, получив направление вектора BiC, а следовательно, и линии относительного движения вне пределов опасной зоны сближения, отсчитывают по картушке курса новый курс Я/Сд, а по щкале скорости - новую скорость Уд своего судна, необходимые для безопасного расхождения со встречными судами.
Таким образом определяют, где должна была лежать точка В на экране радиолокатора для того, чтобы прийти в точку С при движении судна со скоростью и курсом, обеспечивающими безопасное расхождение. При этом векторы УЗ А/ и г, оставаясь неизменными, параллельно переносятся на диаграмме. На практике, для расхождения со встречными судами чаще изменяют только курс или только скорость своего судна. Поэтому при смещении подвижной системы прибора в этом случае оставляют неизменными соответственно показания скорости или курса судна. Кольца дальности, нанесенные на картоне, позволяют, наблюдая за изменением направления вектора относительного встречного судна, выбирать маневр для расхождения с ним на заранее заданной дистанции. Для этого, смещая подвижную систему прибора, выбирают такое направление вектора относительно о движения, чтобы он оказался касательным к кольцу дальности, которое в выбранном масштабе соответствует заданной критической.
дальности 1 критич- Аналогично изложенному выбирается маневр для расхождения с несколькими судами. В этом случае на прибор наносятся точки первого и второго определений положения всех судов, следующих опасными курсами, а затем на 180-градусный сектор 16 переносятся точки первых наблюдений этих судов и, смещая подвижную систему, наблюдают одновременно за изменением векторов относительного движения всех судов. При
этом новые курсы и скорость своего судна отсчитывают непосредственно по соответствующим шкалам прибора.
Примечание. Следует отметить, что при выполнении трех первых пунктов операции по
выбору маневра, т. е. при положении прибора, показанном на фиг. 4а, можно легко определить также курс и скорость встречного судна. Для этого достаточно сместить подвижную систему прибора таким образом, чтобы точка
BI совпала с точкой С, при этом соответствующие стрелки покажут курс и скорость встречного судна по шкалам прибора.
Предмет изобретения
45
Штурманский прибор по авт. св. N° 157799, отличающийся тем, что, с целью рещения задачи на маневрирование, обеспечивающее расхождение с другими судами на безопасном расстоянии, линейка несет прикрепленный к ней сектор из прозрачного материала и фиксирующее устройство, сцепляющее и расцепляющее ее с фигурной осью.
/ 7
П 6
75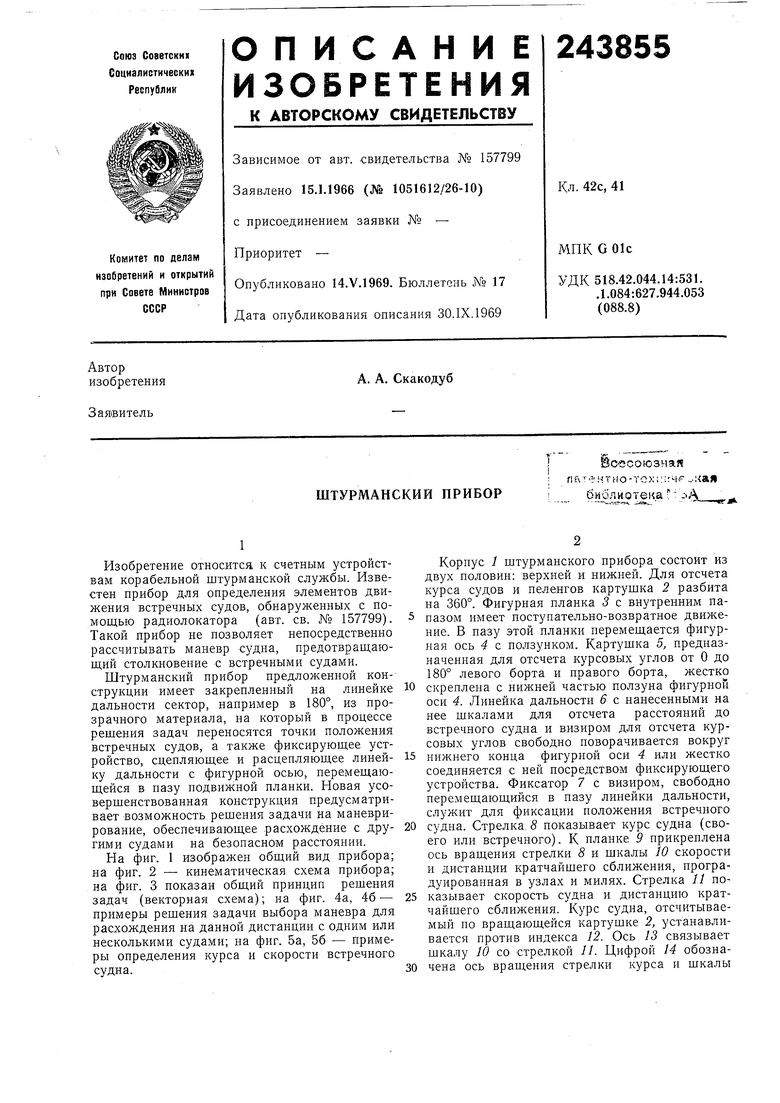
s-ui:
.
иг.5а
иг.56
