Изобретение относится к прикладной геофизике и предназначено для комплексных исследований действующих скважин нефтегазовых месторождений, исследования сверхглубоких бурящихся скважин, может быть использовано в разведочной геофизике.
Известна каротажная станция на основе комплексного скважинного прибора, соединенного через трехжи.льный каротажный кабель с выходом наземной аппаратуры, являющегося входом панели коммутации, к которой подключены панели радиоактивного каротажа и частотной модуляции, измерительный пульт электрического каротажа на многожильном кабеле и измерительный пульт акустического каротажа, третий вход панели коммутации связан с выходами частотных блоков питаний и блоком управления скважинных приборов, выход панели коммутации через переключатели масштабов соединены с аналоговым и цифровым регистраторами, другие входы которых через панель контроля каротажа
соединены с датчиком глубин и магнитным меткоуловителем.
К недостаткам такой аппаратуры относятся большие размеры комплексного скважинного прибора, что ограничивает рамки применимости проводимого каротажа. Другой недостаток- низкая точность телеизмерений, обусловленная использованием частоты импульсной модуляции датчиковой аппаратуры, с одной стороны, что ограничено также полосой пропускания каротажного кабеля.
Наиболее близкой к изобретению является каротажная станция, содержащая сква- жинные приборы, каротажный кабель, мерный ролик, блок питания скважинных приборов, измерительные блоки, промежу- то чные вычислители, шины регистрации данных, блок управления, цифровой регистратор, имеющий каналы глубины и скорости каротажа и канал магнитных меток, аналоговый регистратор, блок масштабирования аналоговой записи, выходы которого подключены к измерительным входам аналогесл С
ч
N
О
со о
Ч
вого регистратора, устройство управления лентопротяжными механизмами, первый выход которого подключен к входу управления лентопротяжными механизмами аналогового регистратора, а второй выход - к входу канала глубины цифрового регистратора, датчик магнитных меток каротажного кабеля, выход которого подключен к входу канала магнитных меток цифрового регистратора и к первому входу канала магнитных меток аналогового регистратора, а выход канала магнитных меток аналогового регистратора подключен к второму входу канала магнитных меток аналогового регистратора, датчик перемещения каротажного кабеля, вход которого соединен с мерным роликом, а выход подключен к первому входу устройства управления лентопротяжными механизмами, устройство измерения скорости каротажа, вход которого подключен к выходу датчика перемещения каротажного кабеля, а выход - к входу канала скорости каротажа цифрового регистратора, причем блок управления включает устройства согласования с каротажным кабелем для различных методов каротажа, устройства управления измерительными и силовыми переключателями скважинных приборов и индикации их состояний, устройства фильтрации информационных сигналов на фоне питающих скважинный прибор силовых напряжений, каждое из которых подключено к коммутационному гнезду, расположенному на лицевой панели блока управления, выходы каротажного кабеля, входы и выходы измерительных блоков и промежуточных вычислителей, выходы блока питания скважинных приборов, входы шин регистрации данных введены в блок управления и также подключены к коммутационному гнезду, а осуществление необходимых соединений внутри блока управления выполнено в виде набора сменных по количеству типов скважинных приборов коммутирующих вставок, каждая из которых представляет собой ответную часть коммутационного гнезда с электрическими соединениями, необходимыми для данного типа скважинных приборов, к выходам шин регистрации данных подключены входы измерительных каналов цифрового регистратора и первые входы каналов блока масштабирования аналоговой записи выходы измерительных каналов цифрового регистратора подключены к вторым входам каналов блока масштабирования аналоговой записи.
Однако данная каротажная станция не отвечает современным требованиям телемеханических систем, предусматривающим
наряду с режимом телеизмерения возможности проведения режима телеуправления, а также телесигнализацию проведения этих двух режимов. Другим ее недостатком является низкая термо- и баро- устойчивость скважинной аппаратуры. Станция требует большого расхода бумаги аналогового регистратора и магнитной ленты цифрового регистратора, связанного с избыточностью
информации, что приводит также к большим затратам времени при интерпретации. Кроме того, станция не обеспечивает требуемого качества документируемой информации из-за сбоя служебного канала меток глубин
и неработоспособна при каротаже скважин с магнитными обсадными колоннами.
Низкая устойчивость аппаратуры к электрическим помехам обусловлена влиянием потенциалов поляризации скважинного пространства, а также потенциалов от блуждающих токов на устье скважин, накладываемые в виде сигналов ошибки на броню каротажного кабеля, изменяя потенциальный уровень электрической, и тем самым,
аппаратурной нулевой шины, Величины этих потенциалов во много раз превышают амплитуды напряжений информационных электрических сигналов. Помимо этого рода помех в процессе каротажа скважин аппаратурный тракт из полупроводниковых радиоэлементов комплексного скважинного прибора подвергается влиянию исккусст- венной радиоактивности (например, при до- полнительномагрегатировании
импульсным генератором нейтронов и т.д.), а также естественной радиоактивности горных пород. Из-за отсутствия блока защиты от ошибок аппаратура этой станции регистрирует ложную информацию совместно с
измерительной.
Цель изобретения - расширение функциональных возможностей и повышение точности измерений.
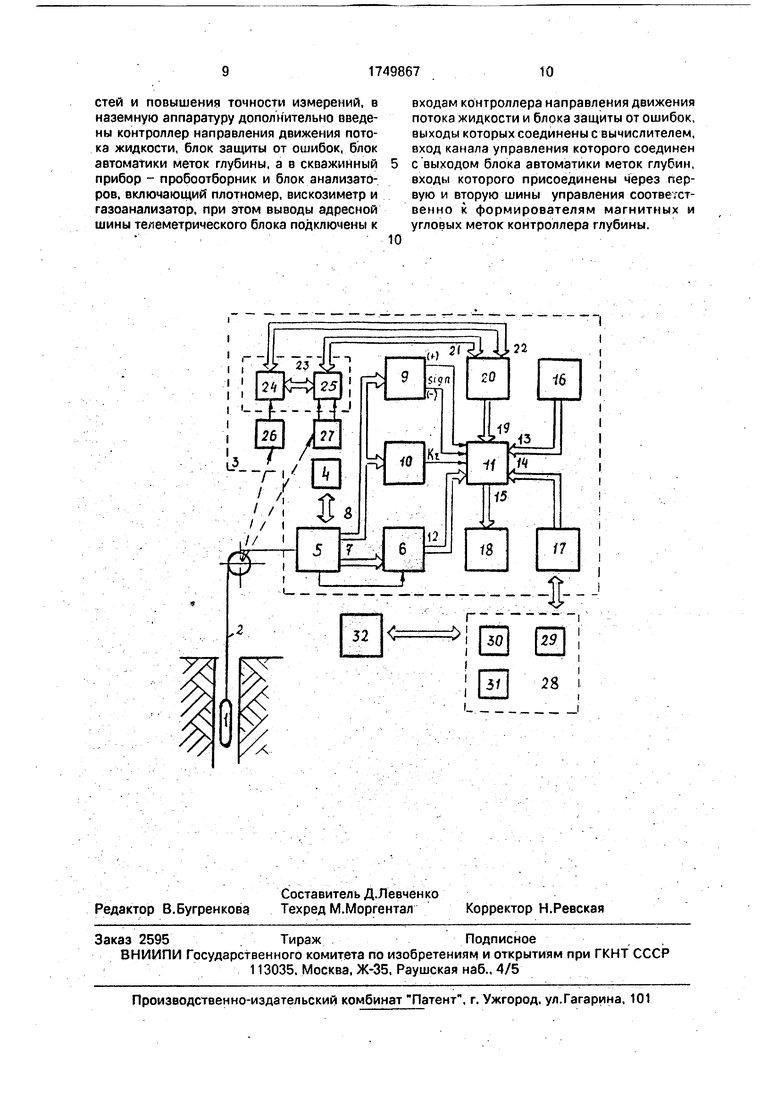
На чертеже изображена блок-схема каротажной станции.
Блок-схема содержит скважинный прибор 1, каротажный кабель 2, наземную аппаратуру 3, включающую блок 4 коммутационных вставок, телеметрический
блок 5, блок 6 памяти, первую шину 7 данных, шину 8 адресов, контроллер 9 направления движения потока жидкости, Рпок 10 защиты от ошибок, вычислитель 11. вторую 12, третью 13, четвертую 14 и пятую 15 шины
данных, таймер 16, блок 17 ввода данных, многоканальный регистратор 18, вход 19 канала управления вычислителя 1i, блок 20 автоматики, первую и вторую шины 21 и 22 управления, контроллер 23 глубины, содержащий формирователи магнитных 24 и угловых 25 меток, датчики магнитных 26 и угловых 27 меток, блок анализаторов 28, включающий вискозиметр 29, плотномер 30 и газоанализатор 31 и пробоотборник 32.
В зависимости от количества измеряемых физических величин в гидродинамической модели исследования действующих скважин, скважинный прибор 1 включает соответствующее число чувствительных элементов глубинных преобразователей температуры, давления, скорости движения и состава примесей потока, выполненных в виде многофункциональных датчиков. Для определения направления движения потока жидкости в состав комплексного сква- жинного прибора 1 дополнительно введен вертушечный датчик скорости движения. При этом корпус скважинного прибора 1 соединен с бронированной оплеткой каротажного кабеля 2 и электрической нулевой шиной наземной аппаратуры 3. Выход глубинного телеметрического блока в скважин- ном приборе 1 соединен через изолированный провод каротажного кабеля 2 с входом наземной аппаратуры 3, переключаемый коммутационными вставками А по входам телеметрического блока 5.
Каротажная станция работает следующим образом.
Наземный телеметрический блок 5 обеспечивает проведение режимов теле-из- мерения, управления и сигнализации. Режим телесигнализации осуществляется по индикации потребляемой электрической энергии скважинным прибором 1. Режим телеуправления предназначен для манипуляции приводами исполнительных механизмов, например пакерующих устройств скважинного прибора 1. Этот режим реализуется при подключении напряжения питания скважинного прибора 1 в противоположной полярности по отношению к его напряжению питания в режиме телеизмерения.
В режиме телеизмерения осуществляется преобразование измерительной информации в скважинном приборе 1 в электрические сигналы, которые передаются через каротажный кабель 2 в телеметрический блок 5. В телеметрическом блоке 5 осуществляется прием и разделение по каналам информационных электрических сигналов скважинных датчиков. Управляющий выход телеметрического блока 5 подключен к синхронизирующему входу буферного блока 6 памяти, вход которого через первую шину 7 данных подключен к выводам телеметрического блока 5. Другие выводы телеметрического блока 5 через шину 8 адресов подключены с вводами контроллера 9 направления движения потока жидкости и блока 10 защиты от ошибок.
Контроллер 9 направления движения потока жидкости вырабатывает управляю- 5 щие сигналы в виде признака вихревого уа- рактера движения исследуемого скважинного потока напротив интервалов перфораций в действующих скважинах. Поэтому два его выхода + и - подключены к
0 входам вычислителя 11.
Блок 10 защиты от ошибок вырабатывает управляющий сигнал в каждой цикловой контрольной сумме для предотвращения записи искаженной телеизмерительной ин5 формации в результате кратковременных сбоев. Поэтому его выход подключен к входу вычислителя 11, вторая шина 12 данных которого подключена к выводам блока 6 памяти. Причем третья 13, четвертая 14 и пятая
0 15 шины данных подключены от вычислителя 11 соответственно к выводам таймера 16, блока 17 ввода и вводам многоканального регистратора 16.
Блок 17 ввода данных представляет со5 бой клавиатуру периферийного оборудования вычислителя 11. Посредством этой клавиатуры осуществляется ввод дискретно измерительных физических величин расслоенных скважинных жидкостей нефти и воды
0 один раз за время технологического процесса нефтеизвлечения на определенной сетке продуктивной залежи. Вход канала 19 управления вычислителя 11 подключен к выходу блока 20 автоматики, входы которого
5 через первую 21 и вторую 22 шины управления присоединены в контроллере глубины 23 к входам формирователей магнитных 24 и угловых 25 меток. При этом вход формирователя 24 магнитных меток подключен к вы0 ходу датчика 26 магнитных меток, магнитосвязанным с бронированной оплеткой каротажного кабеля 2. Входы формирователя 25 угловых меток, как входы контроллера 23 глубины, подключены к вы5 ходам датчика 27 угловых меток, кинематически связанного с устьевым мерным роликом.
Взаимосвязь перечисленных блоков 20 автоматики, контроллера 23 глубины и дат0 чиков магнитных 26 и угловых 27 меток в тракте канала глубины обеспечивают измерения глубины скважины в процессе спуск- но-подъемов комплексного скважинного прибора 1 при дублирующем методе считы5 вания угловых и магнитных меток, при этом считывание магнитных меток с бронированной оплетки кабеля 2 осуществляется через интервалы длины кабеля в 10 м с помощью датчика 26 магнитных меток. Считывание угловых меток осуществляется с помощью
датчика 27 угловых меток в процессе преобразования скорости углового вращения мерного ролика в последовательность импульсов разной частоты.
Суммарная погрешность измерения глубин скважин по одним угловым меткам представляется суммой от погрешностей провисания и проскальзывания на мерном ролике каротажного кабеля 2, что значительно искажает процесс глубинной привязки телеизмерительной информации. Суммарная погрешность измерения глубин по одним магнитным меткам представляется суммой погрешностей от провисания и исчезновения магнитных меток с брониро- оанной оплетки каротажного кабеля 2. При работе в намагниченных обсадных колоннах скважин данный метод не реализуется. Поэтому по мере спуско-подъема скважин- ного прибора 1 осуществляется параллельное считывание магнитных и угловых меток в датчиках 26 и 27 с последующим преобразованием их в контроллере 23 глубин при помощи формирователей магнитных 24 и угловых 25 меток в цифровую форму сигналов.
Принцип работы дублирующего метода измерения глубин заключается в выделении формирователем 25 угловых меток временного интервала коррекции во временном соответствии с одиночным импульсом с формирователя 24 магнитных меток. При выработке одиночных импульсов с выхрда датчика 26 магнитных меток параллельно с выхода формирователя 25 угловых меток осуществляется формирование цифровой развертки глубины и временного интервала коррекций, тактируемые последовательностью импульса с выхода датчика 27 угловых меток. В случае совпадения временного интервала коррекции с одиночным импульсом магнитной метки осуществляется выборка глубины из контроллера 23 глубины через блок 20 автоматики в вычислитель 11.
В зависимости от особенностей построений алгоритмов вычислительных процедур в вычислителе 11 ввод дискретных данных в блоке 17 может производиться по четвертой шине 14 данных в начале или конце сква- жинных исследований, независимо от проводимых измерений физических свойств жидких фаз среды. При этом блок лабораторных анализаторов 28 представляется совокупностью вискозиметра 29, плотномера 30 и газоанализатора 31. Такие анализы жидкостей производятся с помощью пробоотборника 32
При исследовании скважин производится спуск в зону перфорирующего интервала комплексного скважинного прибора 1,
в котором осуществляется первичное преобразование информации глубинных параметров температуры, давления, скорости движения и состава примесей среды в форму электрических сигналов. Эти телеизмерительные сигналы поступают в наземную аппаратуру 3 на пход телеметрического блока 5.
Разделенная по каналам в блоке 5 теле0 измерительная информация вначале поступает на хранение в Каждом цикле телеметрии в буферный блок б памяти по первой шине 7 данных. Адресные сигналы телеметрического блока 5 по шине 8 адре5 сов поступают в контроллер 9 направления движения потока жидкости, в котором вырабатываются управляющие сигналы направления потока + или - на вход вычислителя 11. В то же время эти адресные
0 сигналы обрабатываются в блоке 10 защиты от ошибок. И при наличии выработанной контрольной суммы Кс(в случае неискаженной информации) на его выходе формируется управляющий сигнал. Этот управляющий
5 сигнал позволяет вычислителю 11 считывать в его входную память, исходную цикловую телеизмерительную информацию с блока 6 памяти по второй шине 12 данных. Обработанная в вычислителе 11 телеиз0 мерительная информация поступает по третьей шине 15 данных для записи на вход многоканального регистратора 18. При глубинной и временной привязке этой информации осуществляется параллельная ее
5 запись в многоканальный регистратор 18 с информацией глубины скважины в блоке 20 и текущего времени с таймера 16
При этом контроль режимов телеизмерения и телеуправления осуществляется по
0 величинам электрических токов, потребляемых комплексным скважинным прибором 1. Формула изобретения Каротажная станция, включающая сква- жинный прибор, каротажный кабель и на5 земную аппаратуру, млорая содержит блок коммутационных вставок, телеметрический блоке адресной шиной, блок памяти, вычислитель с каналом управления, а также контроллер глубины, включающий
0 взаимосвязанные формирователи магнитных угловых меток глубины, соединенные с соответствующими датчиками, таймер, регистратор и блок ввода данных, при этом вычислитель соединен с помощью шины
5 данных с таймером, регистратором, блоком ввода и через блок памяти - с телеметрическим блоком, управляющий выход которого подключен к тактовому входу блока памяти, отличающаяся тем, что, с целью расширения функциональных возможностей и повышения точности измерений, в наземную аппаратуру дополнительно введены контроллер направления движения потока жидкости, блок защиты от ошибок, блок автоматики меток глубины, а в скважинный прибор - пробоотборник и блок анализаторов, включающий плотномер, вискозиметр и газоанализатор, при этом выводы адресной шины телеметрического блока подключены к
входам контроллера направления движения потока жидкости и блока защиты от ошибок, выходы которых соединены с вычислителем, вход канала управления которого соединен с выходом блока автоматики меток глубин, входы которого присоединены через первую и вторую шины управления соответственно к формирователям магнитных и угловых меток контроллера глубины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Каротажная станция | 1981 |
|
SU1035548A1 |
| Телеметрическая система для каротажа скважин (ее варианты) | 1984 |
|
SU1265672A1 |
| Телеметрическая система для каротажа скважин | 1983 |
|
SU1122995A1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РАЗРАБОТКИ НЕФТЯНЫХ МЕСТОРОЖДЕНИЙ | 1993 |
|
RU2077735C1 |
| Устройство для регистрации данных каротажа | 1983 |
|
SU1146421A1 |
| Устройство для цифровой записи результатов каротажных измерений | 1977 |
|
SU768948A1 |
| Способ определения ориентации естественной трещиноватости горной породы | 2019 |
|
RU2722431C1 |
| ЛОКАТОР ПЕРФОРАЦИОННЫХ ОТВЕРСТИЙ И СОЕДИНИТЕЛЬНЫХ МУФТ ОБСАДНЫХ ФЕРРОМАГНИТНЫХ ТРУБ | 2000 |
|
RU2191365C2 |
| Комплексно-комбинированный прибор для каротажа скважин | 1983 |
|
SU1087939A1 |
| Скважинный многочастотный интроскоп для исследования околоскважинного пространства | 2019 |
|
RU2733110C1 |
Сущность изобретения состоит в обеспечении различных реж имов измерения, управления и сигнализации в ходе исследования скважин за счет применения комплексной скважинной и наземной аппаратуры, включающей блок коммутационных вставок, телеметрический блок, контроллер направления движения потока, блок защиты от ошибок, блок памяти, вычислитель, блок автоматики, контроллер глубины, блок анализаторов и пробоотборник. Это позволяет расширить функциональные возможности и повысить точность каротажа скважин. 1 ил,
rlvffi
,2
2 tip, 11 22
г
28
| Померанц Н.И., Белоконь Д.В., Козяр В.Ф | |||
| Аппаратура и оборудование геофизических методов исследования скважин | |||
| - М.: Недра, 1985, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Каротажная станция | 1981 |
|
SU1035548A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
