Изобретение относится к арматурост- роению и может найти применение в устройствах, осуществляющих быстрый напуск порции газа в вакуумную камеру, например в электродинамических клапанах плазменных ускорителей.
Известен способ управления движением запорного органа электродинамического клапана, включающий воздействие на запорный орган высокочастотным электромагнитным полем импульсного источника электромагнитной энергии, последующее его торможение и возврат в исходное состояние.
Недостатком указанного способа являются высокие ударные нагрузки при торможении.
Наиболее близким по технической сущности к предлагаемому является способ управления движением запорного органа
электродинамического клапана, включающий воздействие на запорный орган высокочастотным электромагнитным полем импульсного источника электромагнитной энергии, последующее его торможение и возврат в исходное состояние за счет взаимодействия с буферным элементом клапана.
Успешная реализация указанного способа возможна при соблюдении условия, требующего, чтобы для заданной частоты f воздействующего электромагнитного поля глубина проникновения электромагнитного поля устанавливалась меньше толщины запорного органа (5 исходя из условия 1/f
(где / иу - магнитная проницаемость и электропроводность материала запорного органа). Согласно данному способу управления движением запорного органа последний разгоняется электромагнитными
ел
ел
XJ W
силами до значительной скорости, причем максимальная скорость достигается в конце промежутка воздействия на запорный орган оысокочастотным электромагнитным полем Это в конечном счете приводит к возрастанию ударных нагрузок при торможении запорного органа.
Цель изобретения - снижение ударных нагрузок при торможении запорного органа.
Поставленная цель достигается тем, что согласно способу управления движением запорного органа электродинамического клапана, включающему воздействие на запорный орган высокочастотным электромагнитным полем импульсного источника электромагнитной энергии, последующее его торможение и возврат в исходное состояние за счет взаимодействия с буферным элементом клапана.Частоту воздействия электромагнитного поля устанавливают равной исходной, при этом глубину проникновения электромагнитного поля устанавливают больше толщины запорного органа
исходя из условия 1/f л (г /г у .
Новое соотношение параметров процесса обратно общепринятому. При этом допускается некоторое ухудшение (кажущееся порой весьма значительным) характеристик процесса ускорения, чтобы достичь положительного результата при торможении. В известном способе управления движением запорного органа его торможение рассматривается как отдельная задача, поэтому, решая задачу ускорения, избегают выпуска магнитного поля, стремясь запереть его в рабочем зазоре. Для этого требуется установление глубины проникновения электромагнитного поля меньше толщины запорного органа. Предлагаемый способ управления движением запорного органа позволяет обеспечить дополнительный эффект путем использования обычно отрицательного явления выпуска магнитного поля из рабочего зазора. Для этого необходимо при реализации способа устанавливать глубину проникновения электромагнитного поля больше толщины запорного органа при сохранении частоты воздействия электромагнитного поля, равной исходной. Использование указанного эффекта расширяет возможности предлагаемого способа управления движением запорного органа электродинамического клапана, позволяет решать задачу комплексно и при разгоне запорного органа уже предусматриЁать возможность его дальнейшего торможения. Все это позволяет снизить ударные нагрузки при торможении запорного органа.
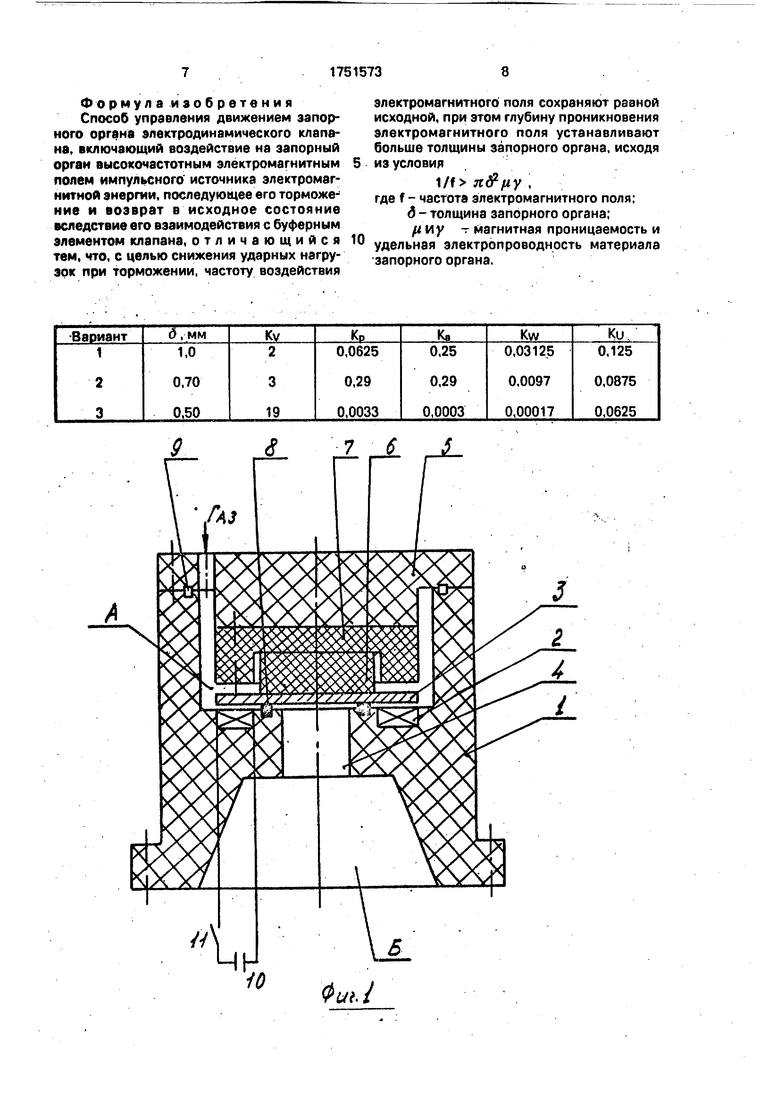
На фиг.1 приведено устройство (электродинамический клапан) для реализации предлагаемого способа управления движением запорного органа электродинамического клапана; на фиг.2-5 - временные диаграммы электромеханических процессов в клапане.и усилий, воздействующих на запорный орган клапана.
Устройство содержит корпус 1, электро0 магнитную катушку 2, запорный орган 3, канал 4 напуска газа, а также узел возврата запорного органа в исходное положение, состоящий из крышки 5 и буферных элементов б и 7. Узел возврата может быть выпол5 ней с одним буферным элементом 6 либо с несколькими буферными элементами 6 и 7 разной жесткости. В исходном положении канал 4 напуска газа перекрыт запорным органом 3. Газ под давлением находится в
0 полости А, которая каналом 4 напуска газа сообщается с вакуумной полостью Б. Герметизация вакуумной полости осуществляется с помощью уплотнения 8, а герметизация корпуса - с помощью уплотнения 9. Для
5 создания высокочастотного электромагнитного поля используется импульсный источник 10 энергии (например, конденсатор), который подсоединен к катушке 2 через разомкнутый в исходном состоянии коммута0 тор 11, Чтобы реализовать предлагаемый способ управления движением запорного органа, необходимо при сохранении величины f, равной исходной, установить глубину проникновения электромагнитного поля
5 больше толщины запорного органа исходя
из условия 1/f 7T 52/iy . Частота воздействующего на запорный орган высокочастотного электромагнитного поля импульсного источника электромагнитной
энергии f связана с параметрами С и L импульсного источника следующим образом:
f 1/2 jrVLC ,
где С - емкость источника энергии (конденсатора);
L - индуктивность цепи, содержащей импульсный источник энергии и электромагнитную катушку клапана. Для рассматриваемого примера f 7 кГц; } 1,667«106 1/Ом 1м 1;/4 12,55.10 7Гн/м: ,7мм; С
0 10 4Ф;1 4.10 6Гн.
Устройство работает следующим образом.
При разрядке конденсатора 10 через коммутатор 11 на катушку 2 клапана по ка5 тушке протекает ток ii(t), Создается высокочастотное электромагнитное поле, воздействующее на запорный орган 3, в результате чего в последнем индуцируется ток обратного направления l2(t). Вследствие
5
взаимодействия токов разного направления ii(t) и i2(t) между ними возникает сила отталкивания. Запорный орган 3 отбрасывается от катушки 2 и открывает проход для газа, Газ из полости А высокого давления через канал 4 напуска поступает в вакуумную полость G. Так как глубина проникновения электромагнитного поля установлена больше толщины запорного органа, это приводит к тому, что между токами li(t) и lz(t) имеет место сдвиг по фазе, Это означает, что возникающие между токами h(t) и l2(t) усилия в определенный момент времени сменяют знак и из отталкивающих становятся притягивающими, Запорный орган тормозится отмеченными притягивающими электромагнитными силами, в результате чего его скорость и кинетическая энергия снижаются, поэтому его торможение буферными элементами 6 и 7 облегчено, а сами элементы 6 иi 7чработают в щадящих условиях. Снижаются ударные нагрузки при торможении запорного органа. Под воздействием элементов 7 и 6, а также сил газового давления запорный орган 3 возвращается в исходное положение и клапан закрывается.
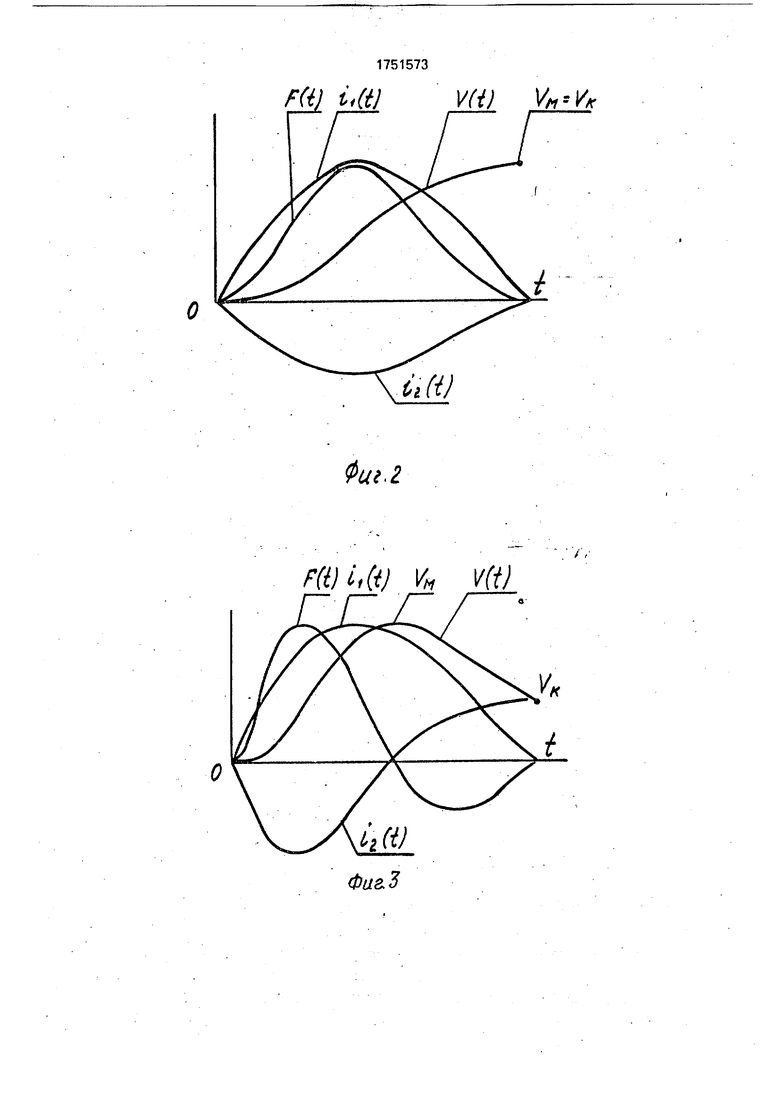
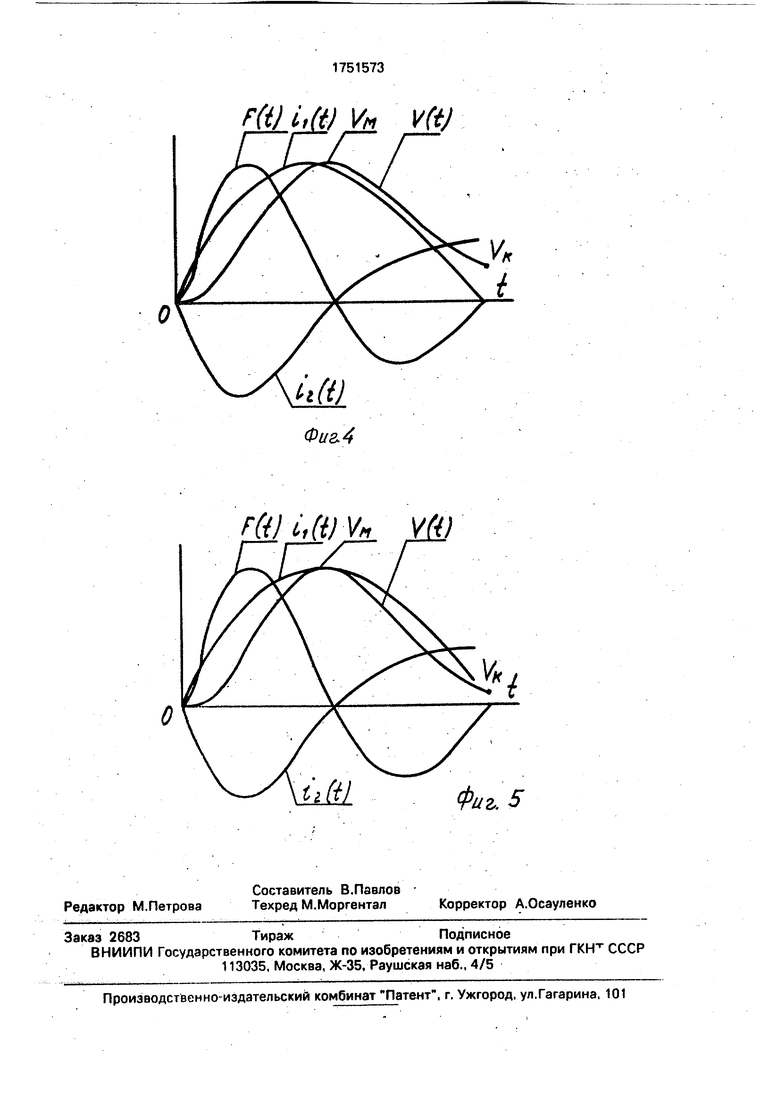
Основные технические преимущества предлагаемого способа управления движением запорного органа электродинамического клапана проиллюстрированы на фиг.2-5 и в таблице.
На фиг.2-5 представлены варианты расчета на ЭВМ временных диаграмм электромеханических„ процессовв электродинамическом клапане до момента взаимодействия запорного органа с буферным элементом 7. На фиг.2-5 и в таблице приняты следующие обозначения: li(t) - ток в катушке клапана; i2(t) - индуцированный ток в запорном органе; F(t) - электромагнитная сила, действующая на запорный орган; V(t)- скорость запорного органа, причем Ум - максимальная скорость; VK - конечная скорость на рассматриваемом участке (скорость соударения запорного органа с буферным элементом 7); Kv VM/VK - коэффициент снижения скорости. Фиг.2 относится к конструкции, где реализован известный способ. Фиг.3-5 относятся к вариантам конструкции по предлагаемому способу управления движения запорного органа. Анализ электромеханических характеристик показывает на качественное отличие процессов, представленных на фиг,2, от процессов, представленных на фиг.3-5. Это отличие прослеживается, если сравнить графики электромагнитной силы F(t), действующей на запорный орган. По известному способу (фиг.2) при протекании по катушке
0
клапана полуволны тока h(t) электромагнитная сила F(t) остается все время положительной. Ток l2(t) находится в противофазе с током h(t). Для конструкций с предлагаемым способом управления движением запорного органа на графиках электромагнитной силы F(t) имеются участки, где сила F(t) отрицательна, что ведет к снижению скорости запорного органа (фиг,3-5).
В таблице более подробно представлены сравнительные характеристики некоторых вариантов электродинамических клапанов, выполненных в соответствии с предлагаемым способом управления дви5 жением запорного органа. Сравнение проводится с конструкцией, где реализован известный способ. При этом индекс ниже О относится к известному способу, индекс новых конструкций. В таблице приняты следующие обозначения: Р0. Pi - максимальная сила взаимодействия между запорным органом и буферным элементом: Эо, ai -удельная энергия, поглощаемая единицей объема буферного элемента ( Р 2 VWZ , а W/U, где W - кинетическая энергия запорного органа массой m (W mV2k/2), Z и U - жесткость и объем буферного элемента): Кр, Ка, Kw. Ku - коэффициенты снижения соответственно Кр PI/PO - максимальной силы взаимодействия запорного органа с буферным элементом; Ка ai/a0 - удельной энергии, поглощаемой единицей объема буферного элемента; Kw Wt/Wo- кинетической энергии запорного органа и Ku - Ui/U0 - объема буферного элемента; Vk0/Vki - отношение конечных скоростей соударения запорного органа с буферным элементом, причем, так как конечная скорость по известному спосо0 бу близка к максимальной скорости рассматриваемых вариантов, VKQ/VKI Kv.
Из данных таблицы видны преимущества, полученные при использовании предлагаемого способа управления движением запорного органа электродинамического клапана.
0
5
0
5
5
Эффект электромагнитного самоторможения запорного органа в конце участка разгона приводит к значительному снижению скорости запорного органа и его кине- тической энергии в момент удара о буферный элемент клапана. Это позволяет уменьшить в десятки и более раз ударные нагрузки приторможении запорного органа и в такой же мере позволяет уменьшить объем буферного элемента, а также повысить надежность его работы.
Формула изобретения Способ управления движением запорного органа электродинамического клапана, включающий воздействие на запорный орган высокочастотным электромагнитным полем импульсного источника электромагнитной энергии, последующее его торможение и возврат в исходное состояние вследствие его взаимодействия с буферным элементом клапана, отличающийся тем, что, с целью снижения ударных нагрузок при торможении, частоту воздействия
электромагнитного поля сохраняют разной исходной, при этом глубину проникновения электромагнитного поля устанавливают больше толщины запорного органа, исходя из условия
1/f Tt&fiy , где f- частота электромагнитного поля;
б - толщина запорного органа;
ft И у - магнитная проницаемость и удельная электропроводность материала запорного органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический клапан | 1991 |
|
SU1810702A1 |
| Электродинамический клапан | 1990 |
|
SU1783212A1 |
| Электродинамический клапан | 1990 |
|
SU1788376A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ИМПУЛЬСНЫЙ ГАЗОВЫЙ КЛАПАН | 2024 |
|
RU2835284C1 |
| Электродинамический клапан | 1985 |
|
SU1763781A1 |
| Способ электромагнитного токовихревого возбуждения механических колебаний деталей | 1982 |
|
SU1105242A1 |
| Быстродействующий индукционно- динамический пневматический клапан | 1978 |
|
SU769168A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОТОКА ПЛАЗМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2187216C1 |
| Импульсный кольцевой электродина-МичЕСКий КлАпАН | 1979 |
|
SU844884A1 |
| СПОСОБ ЭЛЕКТРОДИНАМИЧЕСКОЙ СЕПАРАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2767485C1 |
Изобретение относится карматуростро- ению и может найти применение в устройствах, осуществляющих быстрый напуск порции газа в вакуумную камеру. Цель изобретения - снижение ударных нагрузок при торможении запорного органа электродинамического клапана С этой целью воздействуют на запорный орган высокочастотным электромагнитным полем импульсного источника электромагнитной энергии неизменной частоты, при этом толщину запорного органа устанавливают меньше глубины проникновения электромагнитного поля, исходя из условия 1/f jr 52//y , где f-частота электромагнитного поля- д -толщина запорного органа; /.I и у - магнитная проницаемость и удельная электропроводность материала запорного органа 5 ил 1 табл. (Л
w
1751573
МЩ i(ti Ш У у
F(i}l,(i) VH V(t)
Фиг. г
t ,
F(t) iM Ум VftJ
r(i) Щ) v
lift)
Фиг. 5
| Быстродействующий электродинамический мембранный клапан. | 1959 |
|
SU128243A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Карпенко Л.Н | |||
| Быстродействующие электродинамические отключающие устройства | |||
| Л.О., Энергия, 1973, с.158. | |||
