VI
сл
00
го сл
V4 
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU972646A1 |
| Преобразователь кода в угловое перемещение вала | 1982 |
|
SU1086448A1 |
| Преобразователь угла поворота вала в код | 1979 |
|
SU855711A1 |
| ДАТЧИК ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2000 |
|
RU2209459C2 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1983 |
|
SU1840567A1 |
| Устройство для преобразования кода в угловое положение вала | 1977 |
|
SU651391A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU849262A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
Изобретение относится к измерительной технике и может быть использовано для определения положения шатуна в криво- шипно-шатунных механизмах. Целью изобретения является повышение производительности измерений. Напряжение, пропорциональное угловому положению кривошипа с выхода блока 1 преобразования угловых перемещений вала кривошипа в напряжение, поступает на фозовыпрямитель- ные блоки 2, 4. С выхода первого фазовыпрямительного блока 2 сигнал поступает на вход операционного усилителя 3, выход которого является первым выходом устройства. С выхода второго фазовыпрямительного блока 4 сигнал поступает на компаратор 5, выход которого является вторым выходом устройства. По совокупности сигналов с двух выходов однозначно определяется положение кривошипа при заданном положении ползуна. Блок 1 преобразования может быть выполнен в виде синусно-косинусного вращающегося трансформатора, либо в виде двух сельсинов, развернутых относительно друг друга на 90°. 3 ил. Ъ«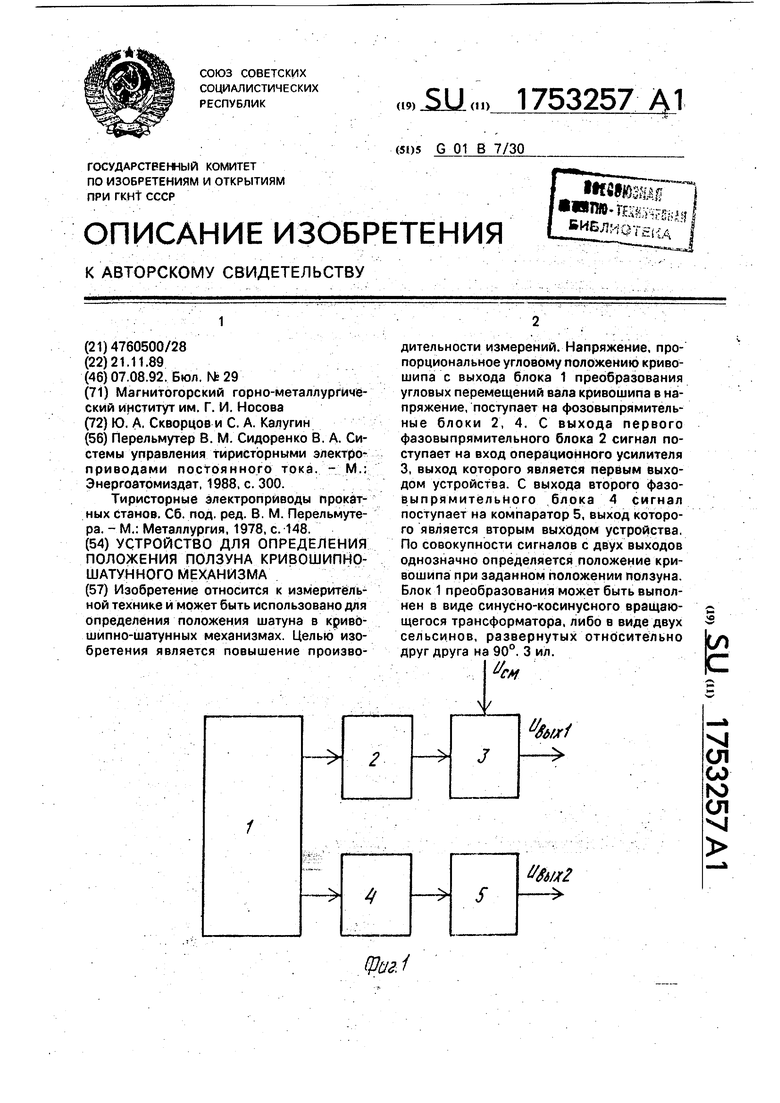
№./
Изобретение относится к электротехнике и может быть использовано для определения положения ползуна кривошипно- шатунного механизма, например, для управления электроприводом кривошипно- шатунных ножниц для резки горячего металла. .
Известно устройство для измерения линейных перемещени й, использующие сель- синовые схемьт измерения угловых перемещений в сочетании с винтовыми, реечными и другими видами механических передач, содержащее сельсин-задатчик и соединенный с ним сельсин-трансформатор, который сочленен с валом механизма и является датчиком углового перемещения. Выход сельсина-трансформатора через фа- зовыпрямительное устройство подается на вход операционного усилителя, работающего в режиме масштабного преобразования. Выход усилителя является выходом устройства. Величина выходного напряжения усилители пропорциональна перемещению рабочего механизма, а полярность этого напряжения определяет направление переме- щения относительно начала отсчета, которое выбирается сельсином-задатчиком. Для обеспечения линейности характеристики названного устройства сельсин-трансформатор соединяется с механизмом через кинематический редуктор, передаточное число которого выбирается таким образом, что при Полном перемещении механизма в ту иНи другую сторону, ротор сельсина поворачивается на угол ±60°
Недостатком известного устройства является наличие сложных кинематических связей и ограниченная рабочая зона сельсина, что существенно снижает трчность измерения.
Наиболее близким к предлагаемому устройству является устройство для измерения линейных перемещений, содержащее два сельсина-задатчика и два сельсина- трансформатора (грубого и точного отсчета). Сельсины-трансформаторы грубого и точного отсчета сочленяются с механизмом и соединены между собой, как и сельсины-за- датчики, дополнительным редуктором. Выходы сельсинов-трансформаторов через фа- зовыпрямительные устройства подаются на операционные усилители У1 и У2, выходы которых являются выходами устройства. Компаратор управляет ключами К1 и К2, которые переключают выходы усилителей в зависимости от величины перемещения механизма. На вход усилителя У1 подается постоянное смещение для устранения ложного нуля, который появляется при четном
передаточном числе редуктора между сельсинами точного и грубого отсчета.
Недостатками известного устройства являются сложность кинематических связей, ограниченные рабочие зоны как для сельсина грубого, так и для сельсина точного отсчета, что снижает точность измерения перемещения. Кроме того, известное устройство при определении линейных пере0 мещений ползуна кривошипно-шатунного механизма не обеспечивает получение информации о взаимном расположении ползуна и кривошипа. Так как положение кривошипа не однозначно при одинаковом
5 положении ползуна.
Цель изобретения - повышение производительности механизма за счет однознач- ного определения полуплоскости нахождения кривошипа относительно оси
0 ползуна при заданном положении ползуна. В устройстве, содержащем блок преобразования угловых перемещений вала кривошипа в напряжение, два фазовыпрями- тельных блока, подключенных входами к вы5 ходам блока преобразования угловых перемещений вала кривошипа в напряжение, операционный усилитель, подключенный первым входом к выходу первого фазовып- рямительного блока и имеющий второй
0 вход, предназначенный для подключения напряжения смещения, компаратор, блок преобразования угловых перемещений вала кривошипа в напряжение выполнен в виде синусно-косинусного преобразователя,
5 компаратор подключен входом к выходу второго фазовыпрямительного блока, выход операционного усилителя является первым, а компаратора - вторым выходом устройства.
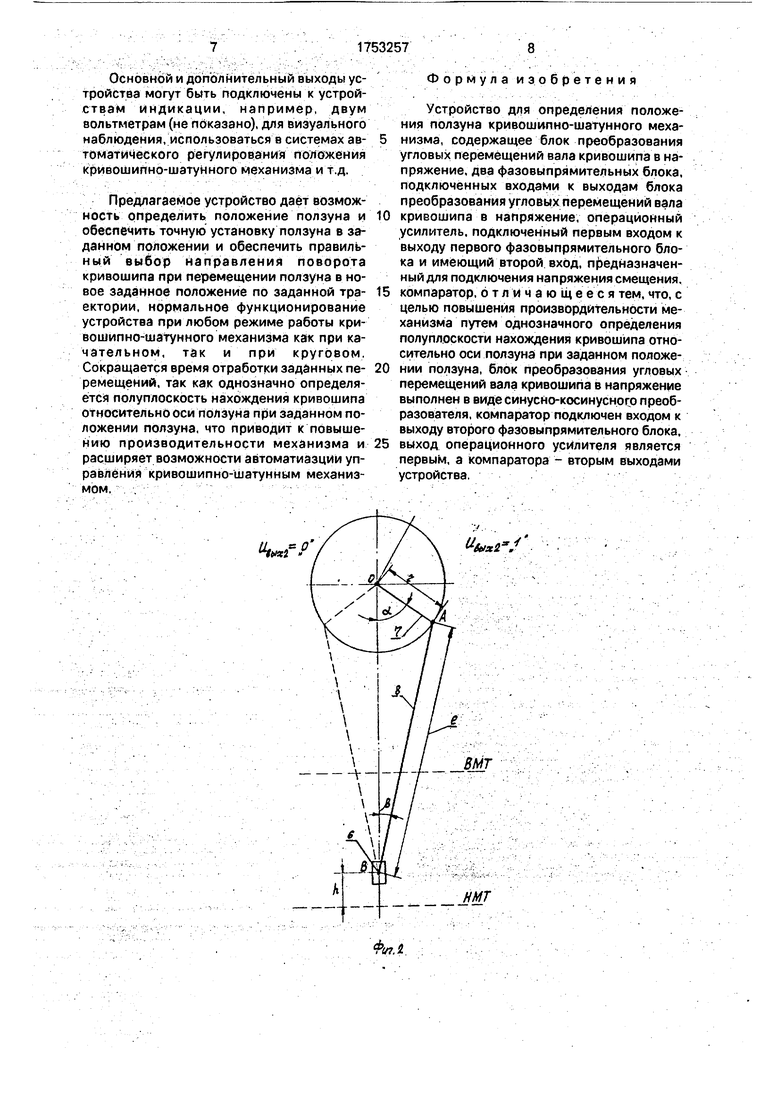
0 На фиг. 1 изображена схема предлагаемого устройства для определения положения ползуна кривошипно-шатунного механизма; на фиг. 2 - схема кривошипно- шатунного механизма; на фиг. 3 - схема
5 предлагаемого устройства для случая, когда блок преобразования угловых перемещений вала кривошипа в напряжение выполнен в виде синус-косинусного преобразователя на базе двух сельсинов-трансфор0 маторов.
В устройстве блок 1 преобразования линейного перемещения в угловое выполнен в виде синусно-косинусного преобразователя на базе двух сельсинов трансформато5 ров, Косинус ный выход блока 1 преобразования угловых перемещений вала кривошипа в напряжение соединен с входом первого фазовыпрямительного устройства 2, выход которого соединен с первым входом операционного усилителя 3,
работающего в режиме масштабного преобразования. Второй вход операционного усилителя 3 предназначен для подачи постоянного смещения UCM. Выход операционного усилителя 3 является первым выходом устройства.
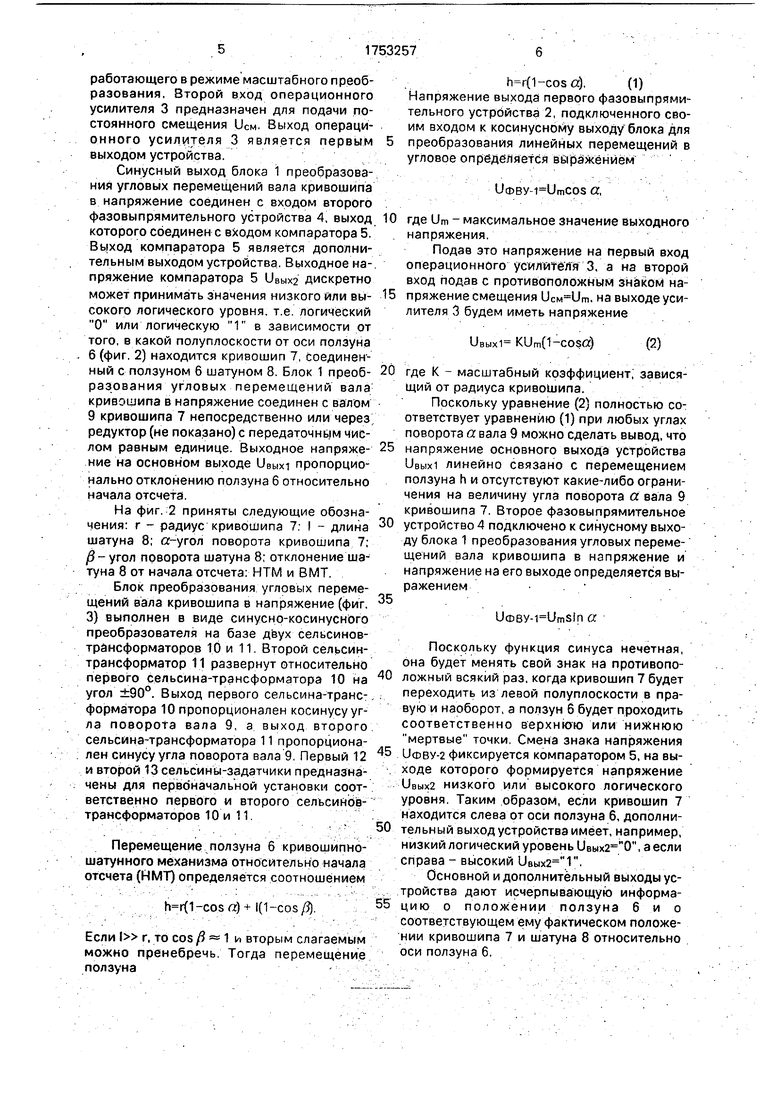
Синусный выход блока 1 преобразования угловых перемещений вала кривошипа в напряжение соединен с входом второго фазовыпрямительного устройства 4, выход которого соединен с входом компаратора 5. Выход компаратора 5 является дополнительным выходом устройства. Выходное напряжение компаратора 5 ивых2 дискретно может принимать значения низкого или высокого логического уровня, т.е логический О или логическую 1 в зависимости от того, в какой полуплоскости от оси ползуна 6 (фиг. 2) находится кривошип 7, соединенный с ползуном б шатуном 8. Блок 1 преобразования угловых перемещений вала кривошипа в напряжение соединен с валом 9 кривошипа 7 непосредственно или через редуктор (не показано) с передаточным числом равным единице. Выходное напряжение на основном выходе ивых1 пропорционально отклонению ползуна 6 относительно начала отсчета.
На фиг. 2 приняты следующие обозначения: г - радиус кривошипа 7 - длина шатуна 8; а-угол поворота кривошипа 7; /3- угол поворота шатуна 8; отклонение шатуна 8 от начала отсчета: НТМ и ВМТ.
Блок преобразования угловых перемещений вала кривошипа в напряжение (фиг. 3) выполнен в виде синусно-косинусного преобразователя на базе двух сельсинов- трансформаторов 10 и 11 Второй сельсин- трансформатор 11 развернут относительно первого сельсина-трансформатора 10 на угол ±90°. Выход первого сельсина-трансформатора 10 пропорционален косинусу угла поворота вала 9, а выход второго сельсина-трансформатора 11 пропорционален синусу угла поворота вала 9 Первый 12 и второй 13 сельсины-задатчики предназначены для первоначальной установки соответственно первого и второго сельсинов- трансформаторов 10 и 11
Перемещение ползуна 6 кривошипно- шатунного механизма относительно начала отсчета (НМТ) определяется соотношением
(1-cos а) + 1(1-cos Д)
Если I г, то cos/ и вторым слагаемым можно пренебречь Тогда перемещение ползуна
(1-cosa),(1)
Напряжение выхода первого фазовыпрямительного устройства 2, подключенного своим входом к косинусному выходу блока для преобразования линейных перемещений в угловое определяется выражением
Uct By-1 UmCOS С,
где Um - максимальное значение выходного напряжения.
Подав это напряжение на первый вход операционного усилителя 3. а на второй вход подав с противоположным знаком напряжение смещения . на выходе усилителя 3 будем иметь напряжение
ивых1 KUm(l-cosa)
(2)
где К - масштабный коэффициент, зависящий от радиуса кривошипа.
Поскольку уравнение (2) полностью соответствует уравнению (1) при любых углах поворота а вала 9 можно сделать вывод, что
напряжение основного выхода устройства 11вых1 линейно связано с перемещением ползуна h и отсутствуют какие-либо ограничения на величину угла поворота а вала 9 кривошипа 7. Второе фазовылрямительное
устройство 4 подключено к синусному выходу блока 1 преобразования угловых перемещений вала кривошипа в напряжение и напряжение на его выходе определяется выражением
Ua 8y-i Umsfn a
Поскольку функция синуса нечетная, она будет менять свой знак на противоположный всякий раз. когда кривошип 7 будет переходить из левой полуплоскости в правую и наоборот, а ползун 6 будет проходить соответственно верхнюю или нижнюю мертвые точки Смена знака напряжения
ифву-а фиксируется компаратором 5, на выходе которого формируется напряжение ивых2 низкого или высокого логического уровня. Таким образом, если кривошип 7 находится слева от оси ползуна б, дополнительный выход устройства имеет, например, низкий логический уровень ивых2 0, а если справа - высокий ивых2 1.
Основной и дополнительный выходы устройства дают исчерпывающую информацию о положении ползуна 6 и о соответствующем ему фактическом положении кривошипа 7 и шатуна 8 относительно оси ползуна 6.
Основной и дополнительный выходы устройства могут быть подключены к устройствам индикации, например, двум вольтметрам (не показано), для визуального наблюдения, использоваться в системах ав- тематического регулирования положения кривошипно-шатунного механизма и т.д.
Предлагаемое устройство дает возможность определить положение ползуна и обеспечить точную установку ползуна в заданном положении и обеспечить правильный выбор направления поворота кривошипа при перемещении ползуна в новое заданное положение по заданной тра- ектории, нормальное функционирование устройства при любом режиме работы кривошипно-шатунного механизма как при ка- чательном, так и при круговом. Сокращается время отработки заданных пе- ремещений, так как однозначно определяется полуплоскость нахождения кривошипа относительно оси ползуна при заданном положении ползуна, что приводит к повышению производительности механизма и расширяет возможности автоматиазции управления кривошипно-шатунным механизмом,
Формула изобретения
Устройство для определения положения ползуна кривошипно-шатунного механизма, содержащее блок преобразования угловых перемещений вала кривошипа в напряжение, два фазовыпрямительных блока, подключенных входами к выходам блока преобразования угловых перемещений вала кривошипа в напряжение, операционный усилитель, подключенный первым входом к выходу первого фазовыпрямительного блока и имеющий второй вход, предназначенный для подключения напряжения смещения, компаратор, отличающееся тем, что, с целью повышения произвордительности механизма путем однозначного определения полуплоскости нахождения кривошипа относительно оси ползуна при заданном положении ползуна, блок преобразования угловых перемещений вала кривошипа в напряжение выполнен в виде синусно-косинусного преобразователя, компаратор подключен входом к выходу второго фазовыпрямительного блока, выход операционного усилителя является первым, а компаратора - вторым выходами устройства.
U,
toxu J
ВМТ
НМТ
/«
tftor
Фа г.З
| Перельмутер В | |||
| М | |||
| Сидоренко В | |||
| А | |||
| Системы управления тиристорными электро- приводами постоянного тока | |||
| - М.: Энергоатомиздат, 1988, с | |||
| ТКАЦКИЙ СТАНОК | 1920 |
|
SU300A1 |
| Тиристорные электроприводы прокатных станов | |||
| Сб | |||
| под | |||
| ред | |||
| В | |||
| М | |||
| Перельмуте- ра | |||
| - М.: Металлургия, 1978, с | |||
| Раздвижной паровозный золотник с подвижными по его скалке поршнями между упорными шайбами | 1922 |
|
SU148A1 |
