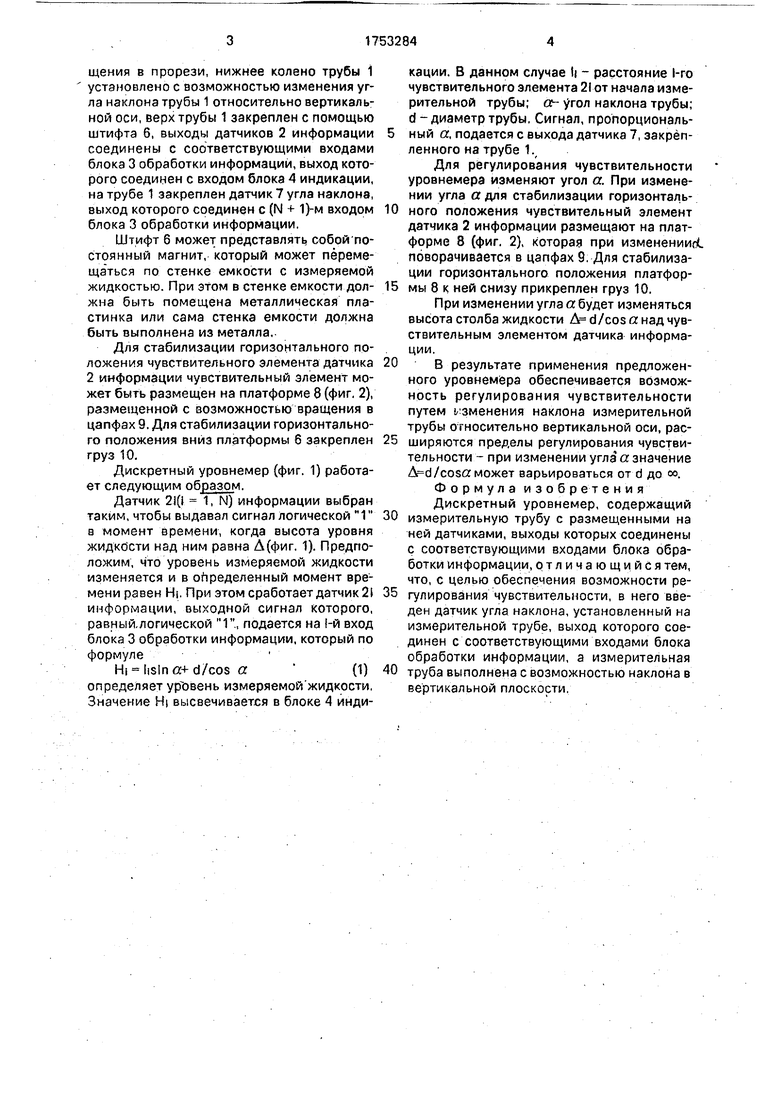
щения в прорези, нижнее колено трубы 1 установлено с возможностью изменения угла наклона трубы 1 относительно вертикальной оси, верх трубы 1 закреплен с помощью штифта б, выходы датчиков 2 информации соединены с соответствующими входами блока 3 обработки информации, выход которого соединен с входом блока 4 индикации, на трубе 1 закреплен датчик 7 угла наклона, выход которого соединен с (N + 1)-м входом блока 3 обработки информации.
Штифт 6 может представлять собой по- стоянный магнит, который может перемещаться по стенке емкости с измеряемой жидкостью. При этом в стенке емкости должна быть помещена металлическая пластинка или сама стенка емкости должна быть выполнена из металла.
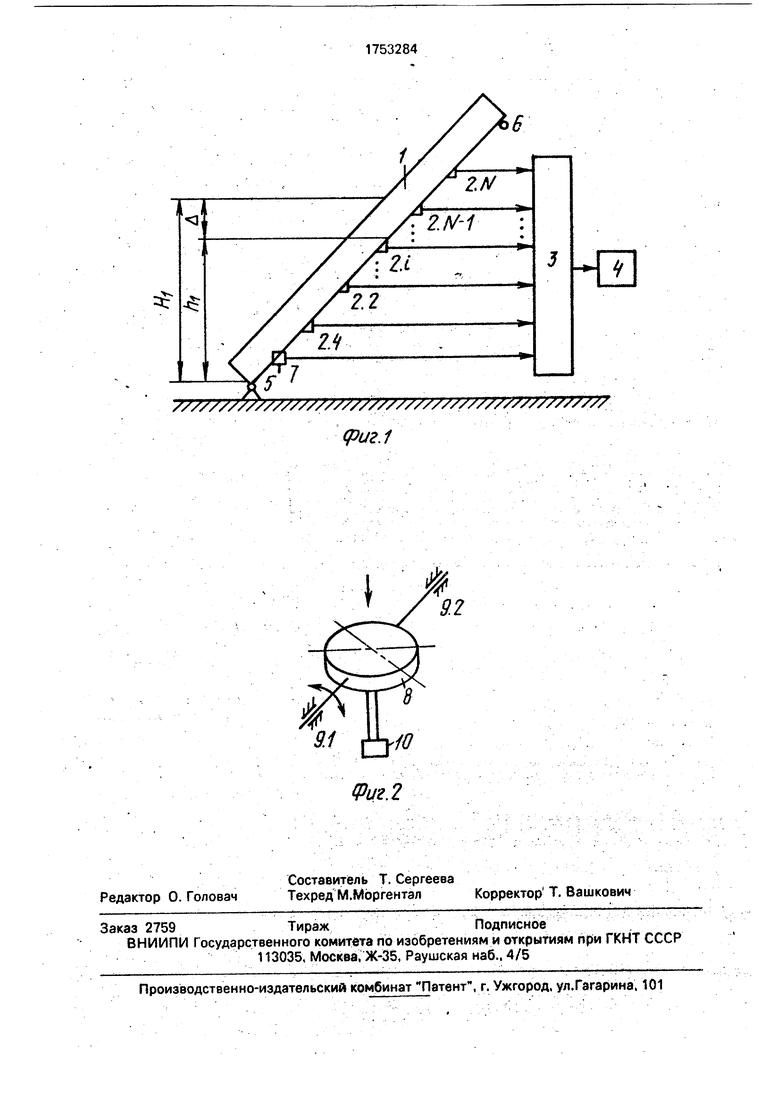
Для стабилизации горизонтального положения чувствительного элемента датчика 2 информации чувствительный элемент может быть размещен на платформе 8 (фиг. 2), размещенной с возможностью вращения в цапфах 9. Для стабилизации горизонтального положения вниз платформы 6 закреплен груз 10.
Дискретный уровнемер (фиг. 1) работает следующим образом.
Датчик 21(1 1, N) информации выбран таким, чтобы выдавал сигнал логической 1 в момент времени, когда высота уровня жидкости над ним равна А(фиг. 1). Предположим, что уровень измеряемой жидкости изменяется и в определенный момент времени равен Hi. При этом сработает датчик 1 информации, выходной сигнал которого, равный.логической 1, подается на 1-й вход блока 3 обработки информации, который по формуле
Hi hsln a+ d/cos a (1)
определяет уровень измеряемой жидкости, Значение HI высвечивается в блоке 4 индикации. В данном случае d - расстояние 1-го чувствительного элемента 21 от начала измерительной трубы; сс угол наклона трубы; d - диаметр трубы, Сигнал, пропорциональный or, подается с выхода датчика 7, закрепленного на трубе 1.
Для регулирования чувствительности уровнемера изменяют угол а. При изменении угла а для стабилизации горизонтального положения чувствительный элемент датчика 2 информации размещают на платформе 8 (фиг. 2), которая при изменении, поворачивается в цапфах 9. Для стабилизации горизонтального положения платформы 8 к ней снизу прикреплен груз 10.
При изменении угла а будет изменяться высота столба жидкости Д d/cos а над чувствительным элементом датчика информации.
в результате применения предложенного уровнемера обеспечивается возможность регулирования чувствительности путем i/ зменения наклона измерительной трубы относительно вертикальной оси, расширяются пределы регулирования чувствительности - при изменении угла а значение Apd/cosct может варьироваться от d до «. Формула изобретения Дискретный уровнемер, содержащий
измерительную трубу с размещенными на ней датчиками, выходы которых соединены с соответствующими входами блока обработки информации, отличающийся тем, что, с целью обеспечения возможности регулирования чувствительности, в него введен датчик угла наклона, установленный на измерительной трубе, выход которого соединен с соответствующими входами блока обработки информации, а измерительная
труба выполнена с возможностью наклона в вертикальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угла наклона подвижного объекта | 1988 |
|
SU1719888A1 |
| Дискретный уровнемер | 1991 |
|
SU1775614A1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| ДИСКРЕТНЫЙ УРОВНЕМЕР | 1992 |
|
RU2047106C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ ОТКЛОНЕНИЙ | 2012 |
|
RU2495374C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| Дискретный уровнемер | 1989 |
|
SU1622767A1 |
| Седиментационный гранулометр | 1980 |
|
SU979962A1 |
| ОДНОГИРОСКОПНЫЙ КОРРЕКТИРУЕМЫЙ ГИРОКОМПАС (ВАРИАНТЫ) | 2000 |
|
RU2169349C1 |
7/7/7//S//7//jW//////r/// //7/7Y7/7777/77/////////
риг.1
