Изобретение относится к системам автоматического управления и регулирования, в частности к гиростабилизированным устройствам, и используется для обеспечения стабилизации линии визирования оптических приборов, размещаемых на подвижных объектах.
Известно устройство [1] стабилизации линии визирования, содержащее индикаторную гироскопическую платформу с установленным на ней зеркалом, карданов подвес, выполненный в виде наружной и внутренней рам, гироскоп с датчиками угла, оптический элемент, усилительно-корректирующее устройство, вход которого соединен с датчиком угла, устройство суммирования, вход которого соединен с корректирующим устройством, а выход - с усилителем мощности, ленточную передачу с коэффициентом передачи 1:2, датчик угловой скорости, усилительно-корректирующее устройство, которое содержит устройство дифференцирования, вход которого соединен с датчиком угловой скорости (ДУС), устройство масштабирования, вход которого соединен с выходом устройства дифференцирования, а выход - с входом устройства суммирования, при этом выход усилителя мощности соединен с входами датчика угла и датчика угловой скорости.
Недостатком данной системы является ограниченность углов прокачки в плоскости тангажа, обусловленное эффектом виньетирования, а также наличием "мертвой" зоны при стремлении угла возвышения в вертикальной плоскости (угла пеленга) ϕу к значению 90°, в которой не обеспечивается стабилизация и наведение линии визирования в плоскости азимута вследствие уменьшения чувствительности датчика стабилизации.
Наиболее близкой к заявленному изобретению является система [2] стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленной на ней стабилизируемой нагрузкой, карданов подвес, гироскоп с датчиками угла, усилительно-корректирующее устройство, представляющее контур стабилизации, содержащий усилитель, вход которого соединен с датчиком угла гироскопа, устройство суммирования, на вход которого поступает сигнал усилителя и сигнал со звена удаления постоянной составляющей ДУСа, а выход со звеном коррекции, выход которого соединен с сумматором, на вход которого поступает сигнал с датчика тока и выходной сигнал звена коррекции, выход которого соединен с усилителем мощности, выход усилителя мощности соединен с двигателем, датчики угловых скоростей ДУС, измеряющие угловую скорость стабилизируемой нагрузки по каналам тангажа, азимута, крена, при этом выход ДУС соединен со звеном удаления постоянной составляющей.
Недостатком данной системы является ограниченность углов прокачки в плоскости тангажа, обусловленное наличием "мертвой" зоны при стремлении угла пеленга ϕу к значению 90°, в которой не обеспечивается стабилизация и наведение линии визирования в плоскости азимута вследствие уменьшения чувствительности датчиков стабилизации.
Задачей изобретения является обеспечение стабилизированного наведения в двух плоскостях без ограничения углов прокачки за счет применения алгоритма перестройки контура стабилизации в зависимости от угла пеленга.
Для достижения указанного технического результата в систему-прототип [2] дополнительно введен вычислитель, в котором реализован алгоритм переключения в зависимости от угла пеленга сигнала с ДУСа, измеряющего угловую скорость стабилизируемой нагрузки в азимутальной плоскости, на сигнал с ДУСа, измеряющего угловую скорость в плоскости крена для дальнейшего его использования в контуре стабилизации азимутального канала наведения и блок принятия решений, осуществляющий перестройку контура стабилизации, исходя из текущего угла пеленга.
Сопоставительный анализ с прототипом [2] показывает, что заявляемая система отличается наличием новых элементов - вычислителя и блока принятия решений, позволяющих решить задачу обеспечения стабилизированного наведения в двух плоскостях без ограничения углов прокачки.
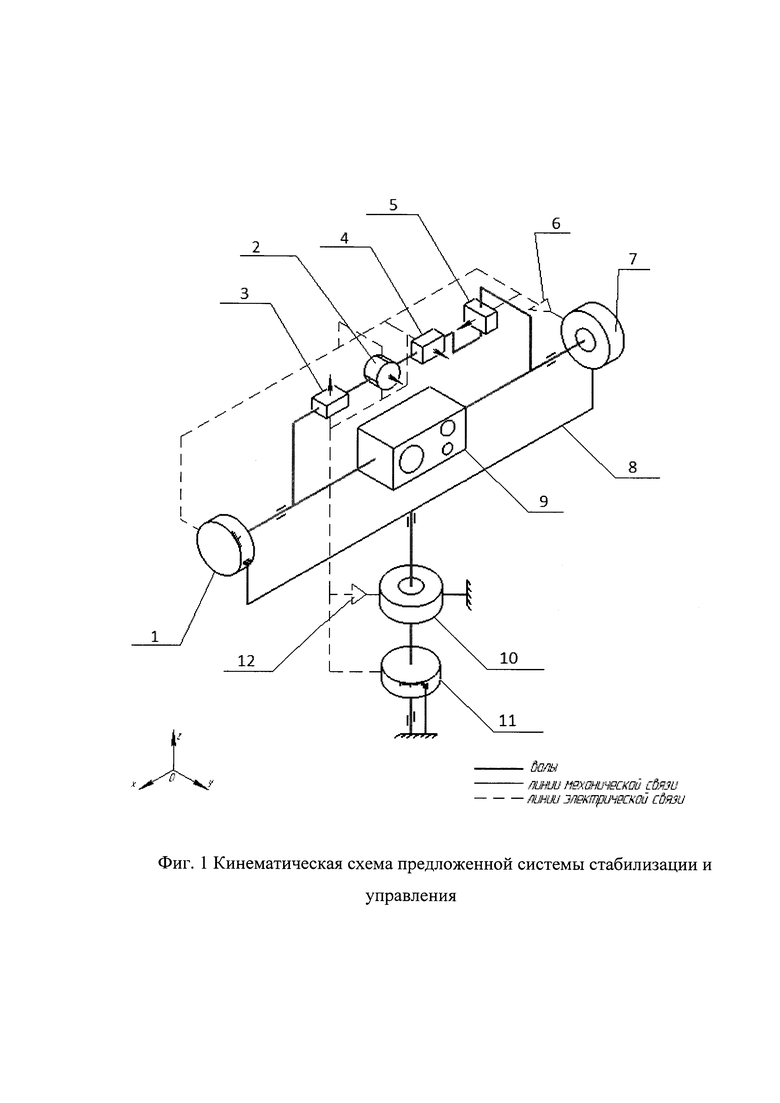
На фиг. 1 представлена кинематическая схема предложенной системы.
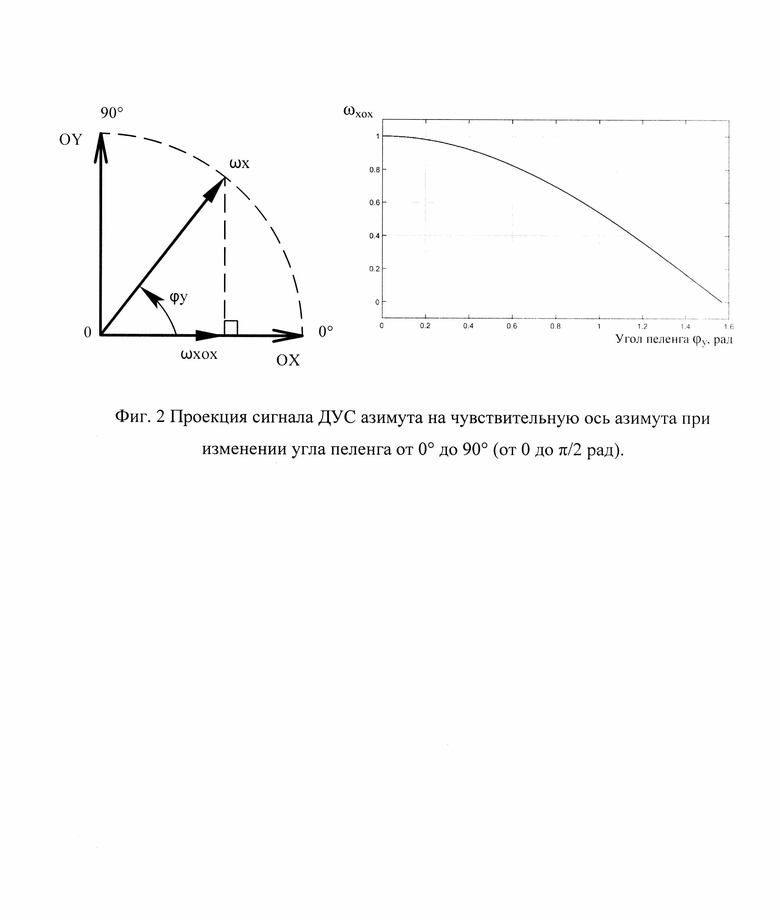
На фиг. 2 представлена проекция сигнала ДУС азимута на чувствительную ось азимута при изменении угла пеленга от 0° до 90° (от 0 до π/2 рад).
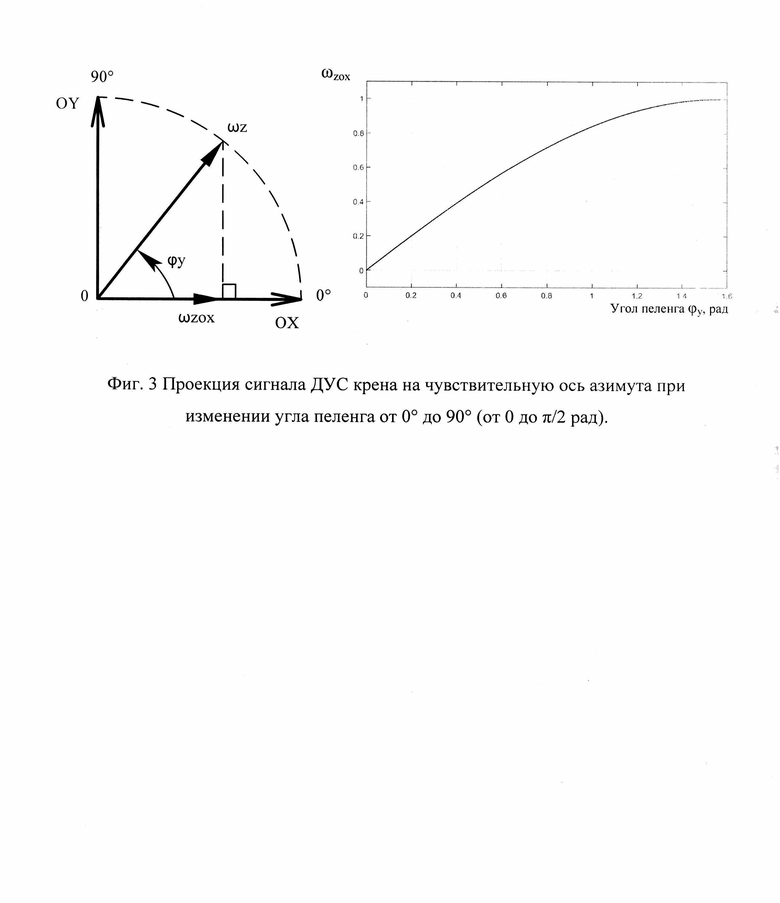
На фиг. 3 представлена проекция сигнала ДУС крена на чувствительную ось азимута при изменении угла пеленга от 0° до 90° (от 0 до π/2 рад).
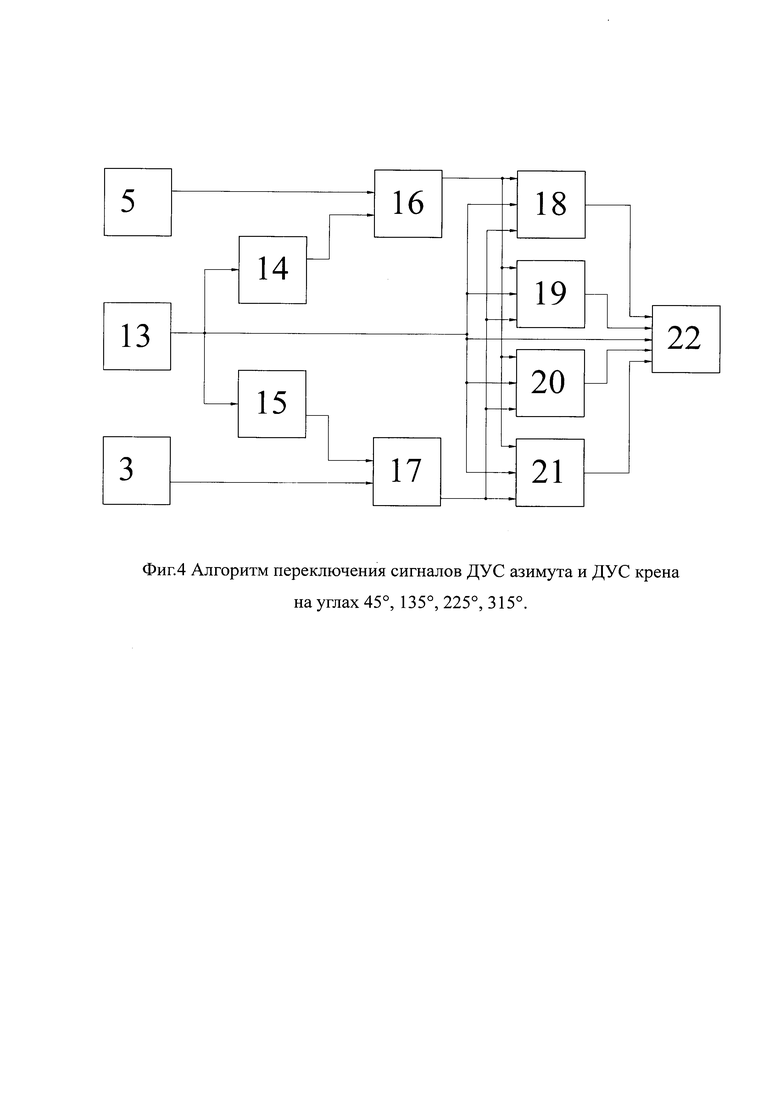
На фиг. 4 представлен алгоритм переключения сигналов ДУС азимута и ДУС крена на углах 45°, 135°, 225°, 315°.
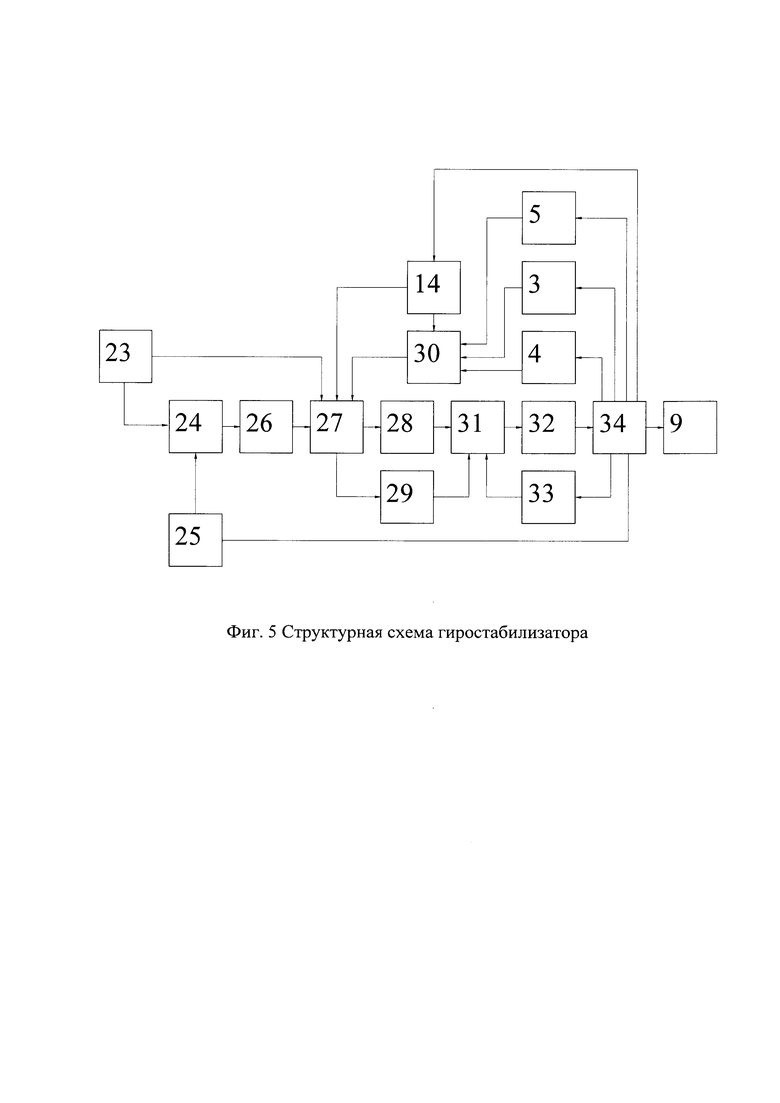
На фиг. 5 представлена структурная схема предложенной системы.
Система стабилизации (фиг. 1) работает следующим образом.
Основой гиростабилизатора является двухосный гироскопический датчик угла 2, жестко закрепленный вместе со стабилизируемой нагрузкой (прицельным модулем ПМ) 9 в кардановом подвесе на раме привода вертикального наведения 8. Гироскопический датчик угла 2 обеспечивает моделирование в инерциальном пространстве двух ортогональных осей с возможностью разворота моделируемых осей в инерциальном пространстве с требуемой скоростью. Измерительные оси совпадают с осями вращения ПМ 9, на осях которых жестко закреплены датчики момента вертикального (привод ВН) 7 и горизонтального (привод ГН) 10 наведения, которые через усилительно-корректирующие устройства привода ВН 6 и привода ГН 12 связаны с выходами соответствующих датчиков угла гироскопа. Гироскоп 2 вместе с датчиками момента вертикального канала 7 и горизонтального канала 10 образуют следящую систему. Угловые возмущения ПМ 9 передаются на корпус гироскопа 2. При развороте корпуса гироскопа 2 относительно неподвижного в инерциальном пространстве ротора появляется электрический сигнал рассогласования, пропорциональный углу поворота ПМ 9. Под действием усиленного сигнала рассогласования датчик момента разворачивает ПМ 9 так, чтобы обеспечить равенство нулю выходного сигнала гироскопа. Таким образом, обеспечивается стабилизация ПМ 9 в двух плоскостях.
Стабилизированный разворот ПМ 9 осуществляется путем разворота ротора гироскопа 3 в инерциальном пространстве за счет встроенных в гироскопический датчик угла датчиков момента. При этом разворот ПМ 9 осуществляется следящей системой через соответствующие датчики момента вертикального 7 и горизонтального наведения 10.
Для измерения углов наведения ПМ 9 по каналам ВН и ГН в состав гиростабилизатора входят датчики угла вертикального (ДУ ВН) 1 и горизонтального (ДУ ГН) 11 наведения. Датчики угла измеряют угловое положения ПМ 9 относительно корпуса гиростабилизатора.
Для повышения точности стабилизации за счет применения управления по производной от ошибки [3] в состав гиростабилизатора входят датчики угловых скоростей (волоконные датчики вращения), которые устанавливаются на стабилизируемую нагрузку для измерения непосредственной угловой скорости ПМ по каналам азимута (ВОГ(Х)) 5, тангажа (ВОГ(У)) 4, крена (ВОГ(Z)) 3. Полученные значения скоростей ПМ 9 используются для организации контура обратной связи по скорости системы автоматического управления.
Существенным недостатком системы является уменьшение чувствительности датчиков стабилизации, измеряющих сигнал в плоскости азимута, при увеличении угла пеленга (фиг. 2).
ωxox=ωх * Cos (ϕу)
где ωх - сигнал ДУС в канале азимута;
ωхох - проекция сигнала ДУС в канале азимута на измерительную ось азимута;
ϕу - угол пеленга.
Проекция сигнала ДУС в канале азимута уменьшается по закону косинуса угла пеленга, обращаясь в ноль при достижении ϕу значения 90°, при котором стабилизация невозможна. В алгоритмах работы стабилизатора реализована косинусная коррекция как произведение исходного значения сигнала при нулевом угле пеленга и нелинейного сомножителя 1/Cos(ϕy), что позволяет скомпенсировать уменьшение крутизны и сохранить неизменным коэффициент передачи при изменении угла пеленга, улучшая динамику системы [4]. Однако при этом происходит ухудшение характеристики сигнал-шум, что является причиной того, что при работе на углах пеленга ϕу больше 60° происходит уменьшение запаса устойчивости системы из-за снижения демпфирования и возможно возникновение автоколебаний по каналу азимута. Для обеспечения запасов устойчивости приходится снижать контурные коэффициенты, что, с одной стороны, обеспечит работу изделия при углах пеленга ϕу больше 60°, а с другой стороны приведет к увеличению значений ошибок стабилизации и, тем самым, снижению точности системы.
Рассмотрим при этом как изменяется проекция сигнала с ДУС крена при перекладке на канал азимута при изменении угла пеленга ϕу от 0° до 90° при закачке системы в плоскости азимута (фиг. 3).
ωzox=ωz* Sin (ϕу)
где ωz - сигнал ДУС в канале крена;
ωzox _ проекция сигнала ДУС в канале крена на измерительную ось азимута;
ϕу- угол пеленга.
Проекция сигнала ДУС крена на измерительную ось азимута будет увеличивается по закону синуса угла пеленга.
При угле пеленга ϕу, равном 45°, значение косинуса угла 45° равно значению синуса угла 45° и равно 0,707 и крутизна ДУС азимута равна крутизне ДУС крена при проекции на измерительную ось азимута. С увеличением угла пеленга и приближении ϕу к значению 90° можно говорить о том, что ДУС крена стал с максимальной крутизной измерять угловую скорость по азимуту, а ДУС азимута - по крену.
Крутизна ДУС азимута и крутизна ДУС крена будут совпадать на следующих углах пеленга ϕу: 45°, 135°, 225°, 315°, или ρ/4, 3ρ/4, 5ρ/4, 7ρ/4 радиан соответственно и будет составлять 0,707:
1) 45°: Cos(45°) равен Sin(45°) и равен 0,707;
2) 135°: минус Cos(135°) равен Sin(135°) и равен 0,707;
3) 225°: минус Cos(225°) равен минус Sin(225°) равен 0,707;
4) 315°: Cos(315°) равен минус Sin(315°) и равен 0,707.
На фиг. 4 представлен алгоритм переключения сигналов ДУС азимута и ДУС крена на углах 45°, 135°, 225°, 315°, который работает следующим образом. На вход умножителя 16 поступает сигнал с ДУС азимута 5, прошедший коррекцию в виде нелинейного сомножителя 1/Cos(ϕy) 14 в зависимости от угла пеленга ϕу 13. На вход умножителя 17 поступает сигнал с ДУС крена 3, прошедший коррекцию в виде нелинейного сомножителя 1/Sin(ϕy) 15 в зависимости от угла пеленга ϕу 13. Опытным путем определено, что коррекция 14 и 15 в пределах углов пеленга ϕу, кратных 0…45°, позволяет добиться равномерной амплитуды выходного сигнала ДУС, при этом практически не ухудшается отношение сигнал-шум, система остается устойчивой и отсутствуют автоколебания. Далее сигналы из умножителя 16, умножителя 17 и угол пеленга 13 поступают на входы блока 18, в котором реализована функция сложения сигналов на угле пеленга ϕу, равном 45°, на входы блока 19, в котором реализована функция сложения сигналов на угле пеленга ϕу, равном 135°, на входы блока 20, в котором реализована функция сложения сигналов на угле пеленга ϕу, равном 225°, на входы блока 21, в котором реализована функция сложения сигналов на угле пеленга ϕу, равном 315°.
Функция сложение сигналов реализует следующую формулу:
ωо=(1-К) * ωхох+К * ωzox
где ω - результирующее значение скорости;
К - весовой коэффициент.
Значение весового коэффициента К плавно изменяется от 0 до 1 при изменении угла пеленга в диапазоне от 44° до 46°, от 134° до 136°, от 224° до 226°, от 314° до 316°.
Далее сигналы с блоков 18, 19, 20, 21, поступают на вход переключателя 22, выход которого, в зависимости от угла пеленга 13, поступает в контур стабилизации канала горизонтального наведения.
Рассмотрим подробнее работу алгоритма переключения (фиг. 4). При увеличении угла пеленга ϕу от 0° до 45°, проекция сигнала ДУС азимута на измерительную ось азимута падает до уровня 0,707 от исходного значения сигнала при нулевом угле пеленга (фиг. 2), а проекция сигнала ДУС крена на измерительную ось азимута увеличивается в 0,707 раз от исходного значения сигнала при нулевом угле пеленга (фиг. 3). Исходя из этого далее идет плавное переключение поступающих сигналов в контур стабилизации канала горизонтального наведения с ДУС азимута на ДУС крена, крутизна которого продолжает расти и проекция на измерительную ось азимута достигает максимума при угле пеленга ϕу, равном 90°, далее его крутизна уменьшается до уровня 0,707 от максимального при достижении угла пеленга ϕу, равном 135°, где происходит обратное переключение сигналов на ДУС азимута и так далее в диапазоне от 0° до 360° с учетом знаков.
Алгоритм переключения (фиг. 4) осуществляет переключение сигналов, поступающих с ДУСов для организации контура стабилизации системы по скорости. В то же время, в системе используется двухосный гироскопический датчик угла, выходным сигналом которого является значение углового положения стабилизируемой нагрузки, измеренное относительно инерциального пространства. Проекция сигнала гироскопического датчика угла в канале азимута также уменьшается по закону косинуса угла пеленга, обращаясь в ноль при достижении ϕу значения 90°. При использовании косинусной коррекции 1/Cos(ϕу) в канале управления по углу, при стремлении ϕу к значению 90°, значение Cos(ϕу) стремится к нулю, при этом 1/Cos(ϕу) стремится к бесконечности. Вышеуказанные явления приводят к тому, что использование показаний гироскопического датчика угла для замыкания контура обратной связи по углу в азимутальной плоскости на углах пеленга, близких к 90°, невозможно. Для решения этой задачи в структуру гиростабилизатора введен блок принятия решений, осуществляющий в зависимости от угла пеленга перенастройку контура стабилизации, исключая из него контур обратной связи, замкнутый по угловому положению, и переключая коррекцию в контуре обратной связи, замкнутой по скорости. Ввиду того, что из системы при углах пеленга ϕу, близких к 90°, исключается контур обратной связи по угловому положению, ожидаемо происходит увеличение ошибки стабилизации в плоскости азимута. Однако, несмотря на снижение точности, стабилизация продолжает осуществляться при любом угле пеленга.
На фиг. 5 представлена структурная схема гиростабилизатора с использованием вычислителя и блока принятия решений.
Система стабилизации линии визирования работает следующим образом. Сигнал наведения 23 поступает на блок принятия решений 27 и на устройство сравнения 24, в котором вычисляется разность между ним и текущим значением гироскопического датчика угла 25, которая через усилительно-корректирующее устройство 26, поступает на вход блока принятия решений 27. Вход блока принятия решений 27 соединен с выходом вычислителя 30, вход которого соединен с ДУС азимута 5, с ДУС крена 3, с ДУС тангажа 4. Выход угла пеленга 14 поступает на вход вычислителя 30 и вход блока принятия решений 27. Выход блока принятия решений 27 соединен с усилительно-корректирующим устройством 28 и усилительно-корректирующим устройством 29. Выбор усилительно-корректирующего устройства 28 или 29 осуществляется блоком принятия решений 27 в зависимости от текущего угла пеленга 14. Выходной сигнал от усилительно-корректирующего устройства 28 или 29 поступает на вход сумматора 31, в котором сравнивается полученное значение ошибки с измеренным датчиком тока 33 действующим значением тока в текущей фазе электродвигателя 34. Вычисленная ошибка поступает на вход усилителя мощности 32, в котором формируется управление электродвигателем 34, обеспечивая разворот гиростабилизатора так, что разность сигнала приближается к нулю. При этом разворачиваются и соответствующие оптические узлы (стабилизируемая нагрузка) 9, связанные с двигателем, для перемещения или стабилизации положения линии визирования. Двигатель 34 представляет собой синхронный моментный электродвигатель серии ДБМ, который в своем составе имеет ротор с постоянными магнитами и статор с трехфазной обмоткой. При этом на выходной вал электродвигателя 34 (ротор) жестко установлены оптические узлы (стабилизируемая нагрузка) 9, гироскопический датчик угла 25, измеряющий изменение углового положения стабилизируемой нагрузки 9 относительно инерциального пространства, а также датчики угловой скорости 5, 3, 4, измеряющие угловую скорость стабилизируемой нагрузки 9 в плоскости азимута, крена и тангажа соответственно относительно инерциального пространства. Датчики тока 33 измеряют текущее значение тока в трехфазных обмотках статора двигателя 34.
Предлагаемое техническое решение исследовано и применено в разрабатываемом в АО АНПП ТЕМП-АВИА" гироскопическом стабилизаторе прицела комбинированного ГСПК ИСМЯ.203343.026, в котором стабилизация поля зрения в плоскости тангажа и азимута обеспечивается за счет прямой стабилизации прицельного модуля. Результаты испытаний подтвердили эффективность предлагаемых технических решений. Стабилизированное наведение линии визирования при качке основания осуществляется в двух плоскостях при любых углах пеленга.
Источники информации
1. Патент РФ №2693561, МПК G01C 21/18, приоритет от 12.09.2018 г.
2. Патент РФ №2753162, МПК G01C 21/18, приоритет от 26.12.2019 г.
3. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - СПб.:"Профессия", 2003.
4. Пельпор Д.С., Колосов Ю.А., Рахтеенко Е.Р. Расчет и проектирование гироскопических стабилизаторов. - М.Машиностроение, 1972.
Изобретение относится к гироскопическим стабилизаторам, предназначенным для получения неподвижного изображения и управления линией визирования оптических приборов подвижных объектов. Сущность предлагаемого технического решения заключается в том, что в систему, содержащую индикаторную гироскопическую платформу, вводятся вычислитель, в котором реализована методика переключения сигнала с датчика угловой скорости (ДУС), зависящего от угла пеленга, на сигнал с ДУС, измеряющего угловую скорость в плоскости крена для дальнейшего его использования в контуре стабилизации азимутального канала наведения, а также блок принятия решений, осуществляющий перестройку контура стабилизации на основании текущего угла пеленга. Техническим результатом заявленного изобретения является обеспечение стабилизированного наведения в двух плоскостях без ограничения углов прокачки. 5 ил.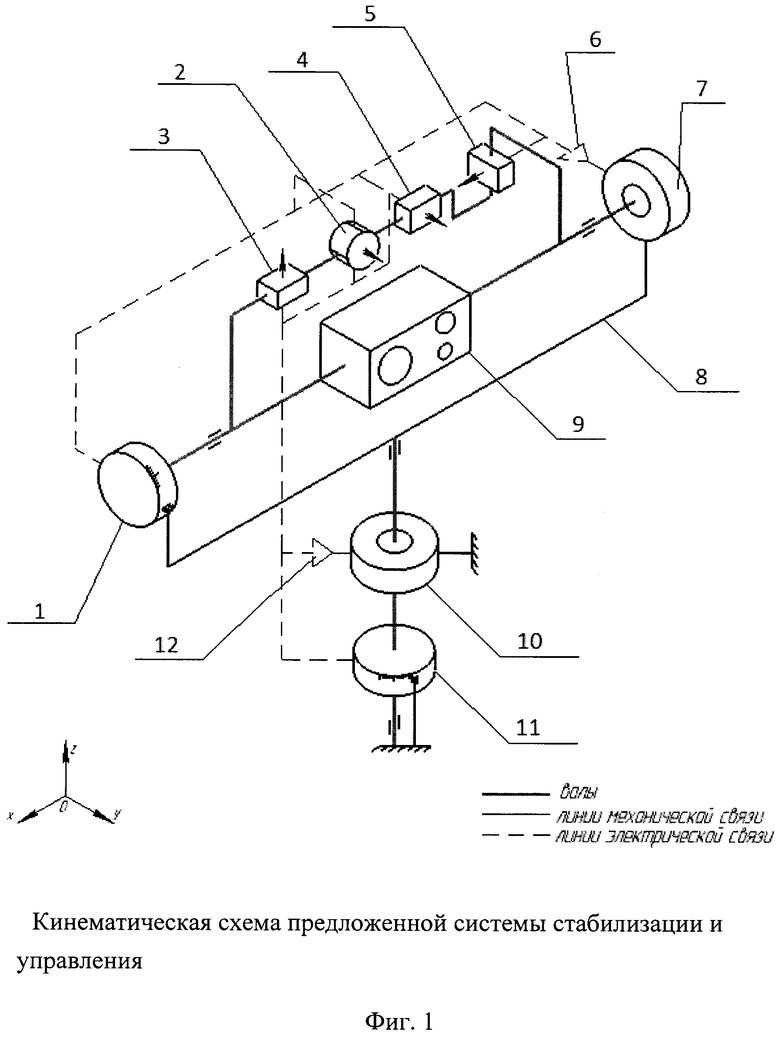
Система стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленной на ней стабилизируемой нагрузкой, карданов подвес, гироскоп с датчиками угла, усилительно-корректирующее устройство, на вход которого поступает сигнал с устройства сравнения, вычисляющее разность между текущим показанием гироскопического датчика угла и сигналом наведения, устройство суммирования, на вход которого поступает сигнал с усилительно-корректирующего устройства и сигнал с ДУС, а выход соединен со звеном коррекции, выход которого соединен с сумматором, на вход которого поступает сигнал с датчика тока и выходной сигнал звена коррекции, выход которого соединен с усилителем мощности, выход усилителя мощности соединен с двигателем, датчики угловых скоростей ДУС, измеряющие угловую скорость стабилизируемой нагрузки по каналам тангажа, азимута, крена, отличающаяся тем, что содержит блок принятия решения, осуществляющий перестройку контура стабилизации, исходя из текущего угла пеленга, на вход которого поступает сигнал с выхода усилительно-корректирующего устройства, сигнал наведения, текущий угол пеленга, сигнал с выхода вычислителя, в котором реализован алгоритм переключения в зависимости от угла пеленга сигнала с датчика угловой скорости, измеряющего угловую скорость стабилизируемой нагрузки в азимутальной плоскости, на сигнал с датчика угловой скорости, измеряющего угловую скорость в плоскости крена для дальнейшего его использования в контуре стабилизации азимутального канала наведения, на вход которого поступают текущий угол пеленга, значения угловых скоростей, измеренных датчиками угловых скоростей по каналам азимута, крена, тангажа, при этом сигнал с выхода блока принятия решения в зависимости от угла пеленга поступает на одно из двух усилительно-корректирующих устройств, выход которых соединен с одним входом сумматора, на второй вход которого поступает сигнал с датчика тока, выход которого соединен с усилителем мощности, выход усилителя мощности соединен с двигателем, причем двигатель своим первым выходом соединен с входом ДУС азимута, вторым выходом соединен с входом ДУС крена, третьим выходом соединен с ДУС тангажа, четвертым выходом соединен с входом угла пеленга, пятым выходом соединен со стабилизируемой нагрузкой, шестым выходом соединен с входом гироскопического датчика угла и седьмым выходом соединен с датчиком тока.
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ГИРОСКОПИЧЕСКОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2018 |
|
RU2693561C1 |
| US 9874308 B2, 23.01.2018 | |||
| US 9277130 B2, 01.03.2016. | |||

