Изобретение относится к области навигационного приборостроения и может быть использовано при создании прецизионных одногироскопных корректируемых гирокомпасов.
Известны одногироскопные корректируемые гирокомпасы, построенные с использованием трехстепенного карданового подвеса гироплатформы (см [1] стр. 305 - 308) и с использованием двухстепенного карданового подвеса (см. [1] стр. 263 - 265).
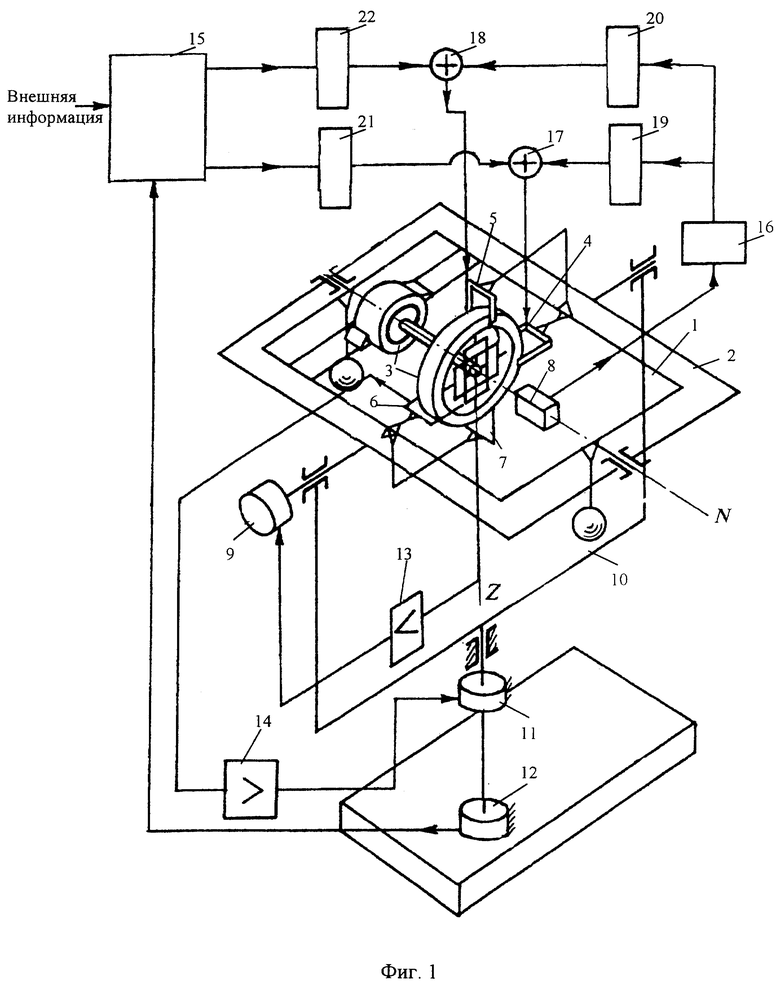
Функциональная схема одногироскопного корректируемого гирокомпаса с трехстепенным кардановым подвесом - прототипа первого варианта изобретения изображена на фиг. 1. Гирокомпас включает гироплатформу 1, обладающую нижней маятниковостью. "Северная" ось N платформы параллельна оси подшипников промежуточной горизонтальной рамки 2 карданового подвеса, вертикальная ось Z перпендикулярна плоскости платформы, "восточная" ось (на фиг. 1 не показана) лежит в плоскости платформы и перпендикулярна осям N и Z. На платформе установлен трехстепенный гироскоп 3 (на фиг. 1 показан динамически настраиваемый гироскоп), кинетический момент которого параллелен <северной> оси платформы, а оси датчиков момента 4 и 5 и датчиков угла 6 и 7 параллельны вертикальной и "восточной" осям платформы. На платформе также установлен акселерометр 8, ось чувствительности которого параллельна "северной" оси платформы. На цапфе промежуточной горизонтальной рамки 2 карданового подвеса установлен двигатель стабилизации 9 вокруг "восточной" оси платформы. На цапфе наружной вертикальной рамки 10 карданового подвеса установлены двигатель стабилизации 11 вокруг вертикальной оси платформы и датчик угла курса 12. Гирокомпас включает также два усилителя стабилизации 13 и 14, устройство ввода внешней информации 15, фильтр 16, два сумматора 17 и 18, два блока масштабирования 19 и 20, блоки формирования восточной 21 и вертикальной 22 угловых скоростей. Выход акселерометра 8 соединен с входом фильтра 16, выход которого соединен с входами блоков масштабирования 19 и 20, выходы которых соединены с входами сумматоров 17 и 18 соответственно. Свободные входы сумматоров 17 и 18 соединены с выходами блоков формирования восточной 21 и вертикальной 22 угловых скоростей соответственно. Выход сумматора 17 соединен с входом датчика момента гироскопа 4 вокруг вертикальной оси платформы, выход сумматора 18 соединен с входом датчика момента гироскопа 5 вокруг "восточной" оси платформы. Выход устройства ввода внешней информации 15 соединен с входами блоков формирования вертикальной угловой скорости платформы 22 и восточной угловой скорости платформы 21, а его входы - с внешними по отношению к гирокомпасу источниками информации о скорости объекта и широте его места и выходом датчика угла курса 12. Выход датчика угла гироскопа вокруг вертикальной оси платформы 6 соединен с входом усилителя стабилизации 14, выход которого соединен с входом двигателя стабилизации 11, выход датчика угла гироскопа 7 вокруг "восточной" оси платформы соединен с входом усилителя стабилизации 13, выход которого соединен с двигателем стабилизации 9.
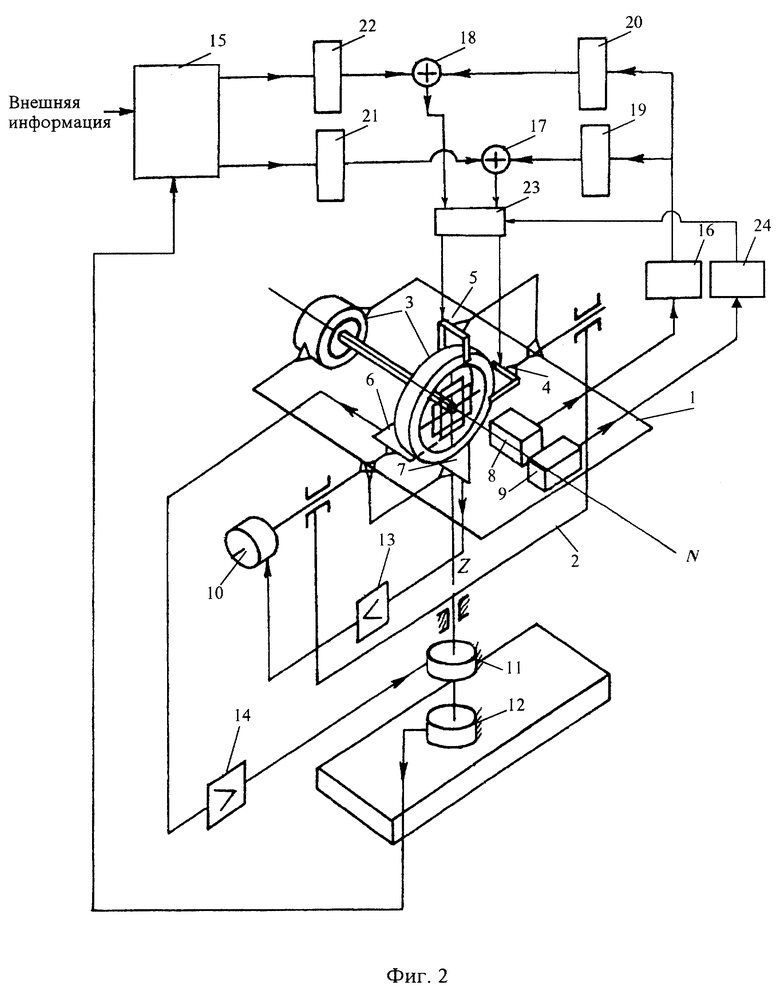
Функциональная схема одногироскопного корректируемого гирокомпаса с двухстепенным кардановым подвесом - прототипа второго варианта изобретения изображена на фиг. 2. Гирокомпас включает гироплатформу 1, "восточная" ось платформы (на фиг. 2 не показана) совпадает с осью подшипников внешней вертикальной рамки 2 карданового подвеса, вертикальная ось Z перпендикулярна плоскости платформы, "северная" ось N лежит в плоскости платформы и перпендикулярна "восточной" и вертикальной осям. На платформе установлен трехстепенный гироскоп 3 (на фиг. 2 показан динамически настраиваемый гироскоп), кинетический момент которого параллелен <северной> оси платформы, а оси датчиков момента 4 и 5 и датчиков угла 6 и 7 параллельны вертикальной и "восточной" осям платформы. На платформе установлены также два акселерометра: "северный" 8, ось чувствительности которого параллельна "северной" оси платформы и "восточный" 9, ось чувствительности которого параллельна "восточной" оси платформы. На цапфе платформы установлен двигатель стабилизации 10 вокруг "восточной" оси платформы. На цапфе наружной вертикальной рамки 2 карданового подвеса установлен двигатель стабилизации 11 вокруг вертикальной оси платформы и датчик угла курса 12. Гирокомпас включает также два усилителя стабилизации 13 и 14, устройство ввода внешней информации 15, фильтр 16, два сумматора 17 и 18, два блока масштабирования 19 и 20, блоки формирования восточной 21 и вертикальной 22 угловых скоростей, блок аналитической стабилизации 23, а также блок вычисления наклона платформы вокруг <северной> оси 24. Выход "северного" акселерометра 8 соединен с входом фильтра 16, выход которого соединен с входами блоков масштабирования 19 и 20. Выходы блоков масштабирования 19 и 20 соединены с входами сумматоров 17 и 18 соответственно. Свободные входы сумматоров 17 и 18 соединены с выходами блоков формирования восточной 21 и вертикальной 22 угловых скоростей соответственно. Выход сумматора 18 соединен с первым входом, а выход сумматора 19 - со вторым входом блока аналитической стабилизации 23, свободный вход которого соединен с выходом блока вычисления наклона платформы вокруг "северной" оси 24, вход которого соединен с выходом "восточного" акселерометра 9. Первый вход блока аналитической стабилизации 23 соединен с входом датчика момента гироскопа вокруг вертикальной оси платформы 4, а второй его выход - с входом датчика момента гироскопа 5 вокруг "восточной" оси платформы. Выход устройства ввода внешней информации 15 соединен с входами блоков формирования вертикальной угловой скорости платформы 22 и восточной угловой скорости платформы 21, а его входы - с внешними по отношению к гирокомпасу источниками информации о скорости объекта и широте его места и выходом датчика угла курса 12. Выход датчика угла гироскопа вокруг вертикальной оси платформы 6 соединен с входом усилителя стабилизации 14, выход которого соединен с входом двигателя стабилизации 11. Выход датчика угла гироскопа вокруг "восточной" оси платформы 7 соединен с входом усилителя стабилизации 13, выход которого соединен с двигателем стабилизации 10.
Недостатком гирокомпасов-прототипов по первому и второму вариантам изобретения является то, что из-за ускорений при маневрировании объекта-носителя и качке они возмущаются. Так при движении судна возникает значительная дополнительная погрешность до 2,7 градуса (см.[1], таблицу 2.10 стр. 257 и таблицу 2.11 стр. 300).
Целью настоящего изобретения является повышение точности одногироскопного корректируемого гирокомпаса за счет устранения его возмущаемости при маневрировании объекта.
Возмущаемость одногироскопного корректируемого гирокомпаса по первому варианту изобретения при воздействии северных ускорений при маневрировании объекта-носителя устраняется за счет того, что в известный одногироскопный корректируемый гирокомпас, включающий гироплатформу. обладающую нижней маятниковостью, помещенную во внешний кардановый подвес с тремя степенями свободы, причем "северная" ось платформы совпадает с осью подшипников промежуточной горизонтальной рамки карданового подвеса, вертикальная ось перпендикулярна плоскости платформы, "восточная" ось лежит в плоскости платформы и перпендикулярна "северной" и вертикальной осям, на платформе установлены трехстепенный гироскоп с двумя датчиками угла и двумя датчиками момента и акселерометр, причем кинетический момент гироскопа параллелен "северной" оси платформы, оси датчиков момента и датчиков угла гироскопа вокруг вертикальной и "восточной" осей параллельны этим осям, а ось чувствительности акселерометра параллельна "северной" оси платформы, на цапфе промежуточной горизонтальной рамки карданового подвеса установлен двигатель стабилизации вокруг "восточной" оси платформы, на цапфе наружной вертикальной рамки установлены двигатель стабилизации вокруг вертикальной оси платформы и датчик угла курса, гирокомпас включает также два усилителя стабилизации, устройство ввода внешней информации, два сумматора, два блока масштабирования, блоки формирования восточной и вертикальной угловых скоростей, причем входы первого сумматора соединены с выходами первого блока масштабирования и блока формирования восточной угловой скорости, а его выход - с входом датчика момента гироскопа вокруг вертикальной оси платформы, входы второго сумматора соединены с выходами второго блока масштабирования и блока формирования вертикальной угловой скорости, а его выход - с входом датчика момента гироскопа вокруг "восточной" оси платформы, выход устройства ввода внешней информации соединен с входом блока формирования вертикальной угловой скорости, а его входы - с внешними по отношению к гирокомпасу источниками информации о скорости объекта-носителя и широте его места и выходом датчика угла курса, выход датчика угла гироскопа вокруг вертикальной оси платформы соединен с входом первого усилителя стабилизации, выход которого соединен с входом двигателя стабилизации вокруг вертикальной оси платформы, выход датчика угла гироскопа вокруг "восточной" оси платформы соединен с входом второго усилителя стабилизации, выход которого соединен с двигателем стабилизации вокруг "восточной" оси платформы, дополнительно введены блок интегрирования, третий блок масштабирования, два блока вычитания, третий сумматор, блок формирования северного компенсирующего ускорения, причем уменьшаемый вход первого блока вычитания соединен с выходом <северного> акселерометра, а его вычитаемый вход - с выходом блока формирования северного компенсирующего ускорения, вход которого соединен с выходом устройства ввода внешней информации, входы третьего сумматора соединены с выходом первого блока вычитания и третьего блока масштабирования, а его выход - с входом блока интегрирования, выход которого соединен с входом блока формирования восточной угловой скорости и с уменьшаемым входом второго блока вычитания, вычитаемый вход которого соединен с выходом устройства ввода внешней информации, а выход - с входами первого, второго и третьего блоков масштабирования.
Полное устранение возмущаемости гирокомпаса обеспечивается тем, что в него дополнительно вводятся блок аналитической стабилизации и блок вычисления наклона платформы вокруг "северной" оси, причем первый вход блока аналитической стабилизации соединен с выходом первого сумматора, второй вход - с выходом второго сумматора, третий вход - с выходом блока вычисления наклона платформы вокруг "северной" оси, первый выход блока аналитической стабилизации соединен с датчиком момента гироскопа вокруг вертикальной оси, второй выход - с датчиком момента гироскопа относительно "восточной" оси, а вход блока вычисления наклона платформы вокруг "северной" оси соединен с выходом устройства ввода внешней информации.
Возмущаемость одногироскопного корректируемого гирокомпаса по второму варианту изобретения при воздействии северных ускорений при маневрировании объекта-носителя устраняется за счет того, что в известный одногироскопный корректируемый гирокомпас, включающий гироплатформу, помещенную во внешний кардановый подвес с двумя степенями свободы, причем "восточная" ось платформы совпадает с осью подшипников внешней вертикальной рамки карданового подвеса, вертикальная ось перпендикулярна плоскости платформы, "северная" ось лежит в плоскости платформы и перпендикулярна "восточной" и вертикальной осям, на платформе установлены трехстепенный гироскоп с двумя датчиками угла и двумя датчиками момента, "северный" и "восточный" акселерометры, причем кинетический момент гироскопа параллелен "северной" оси платформы, оси датчиков момента и датчиков угла гироскопа вокруг вертикальной и "восточной осей параллельны этим осям, а оси чувствительности "северного" и "восточного" акселерометров параллельны "северной" и "восточной" осям платформы соответственно, на цапфе платформы установлен двигатель стабилизации вокруг "восточной" оси платформы, на цапфе наружной вертикальной рамки установлены двигатель стабилизации вокруг вертикальной оси платформы и датчики угла курса, гирокомпас включает также два усилителя стабилизации, устройство ввода внешней информации, два сумматора, два блока масштабирования, блоки формирования восточной и вертикальной угловых скоростей, блок аналитической стабилизации и блок вычисления наклона платформы вокруг "северной" оси, причем входы первого сумматора соединены с выходами первого блока масштабирования и блока формирования восточной угловой скорости, а его выход - с первым входом блока аналитической стабилизации, входы второго сумматора соединены с выходами второго блока масштабирования и блока формирования вертикальной угловой скорости, а его выход - со вторым входом блока аналитической стабилизации, выход "восточного" акселерометра соединен с входом блока вычисления наклона платформы вокруг "северной" оси, выход которого соединен со свободным входом блока аналитической стабилизации, два выхода которого соединены с датчиками момента гироскопа вокруг "восточной" и вертикальной осей платформы, выход устройства ввода внешней информации соединен с входом блока формирования вертикальной угловой скорости, а его входы - с внешними по отношению к гирокомпасу источниками информации о скорости объекта-носителя и широте его места и выходом датчика угла курса, выход датчика угла гироскопа вокруг вертикальной оси платформы соединен с входом первого усилителя стабилизации, выход которого соединен с входом двигателя стабилизации вокруг вертикальной оси платформы, выход датчика угла гироскопа вокруг "восточной" оси платформы соединен с входом второго усилителя стабилизации, выход которого соединен с двигателем стабилизации вокруг "восточной" оси платформы, дополнительно введены блок интегрирования, третий блок масштабирования, два блока вычитания, третий сумматор, блок формирования северного компенсирующего ускорения, причем уменьшаемый вход первого блока вычитания соединен с выходом "северного" акселерометра, а его вычитаемый вход - с выходом блока формирования северного компенсирующего ускорения, вход которого соединен с выходом устройства ввода внешней информации, входы третьего сумматора соединены с выходом первого блока вычитания и третьего блока масштабирования, а его выход - с входом блока интегрирования, выход которого соединен с входом блока формирования восточной угловой скорости и с уменьшаемым входом второго блока вычитания, вычитаемый вход которого соединен с выходом устройства ввода внешней информации, а выход - с входами первого, второго и третьего блоков масштабирования.
Полное устранение возмущаемости гирокомпаса обеспечивается тем, что в него дополнительно вводятся третий блок вычитания и блок вычисления "восточного" ускорения, причем выход "восточного" акселерометра соединен с вычитаемым входом третьего блока вычитания, вычитающий вход которого соединен с выходом блока вычисления "восточного" ускорения, выход третьего блока вычитания соединен с входом блока вычисления наклона платформы вокруг "северной" оси.
На фиг. 1 изображена функциональная схема прототипа заявленного устройства по первому варианту изобретения.
На фиг. 2 изображена функциональная схема прототипа заявленного устройства по второму варианту изобретения.
На фиг. 3 изображена функциональная схема примера конкретного исполнения заявленного устройства по первому варианту изобретения.
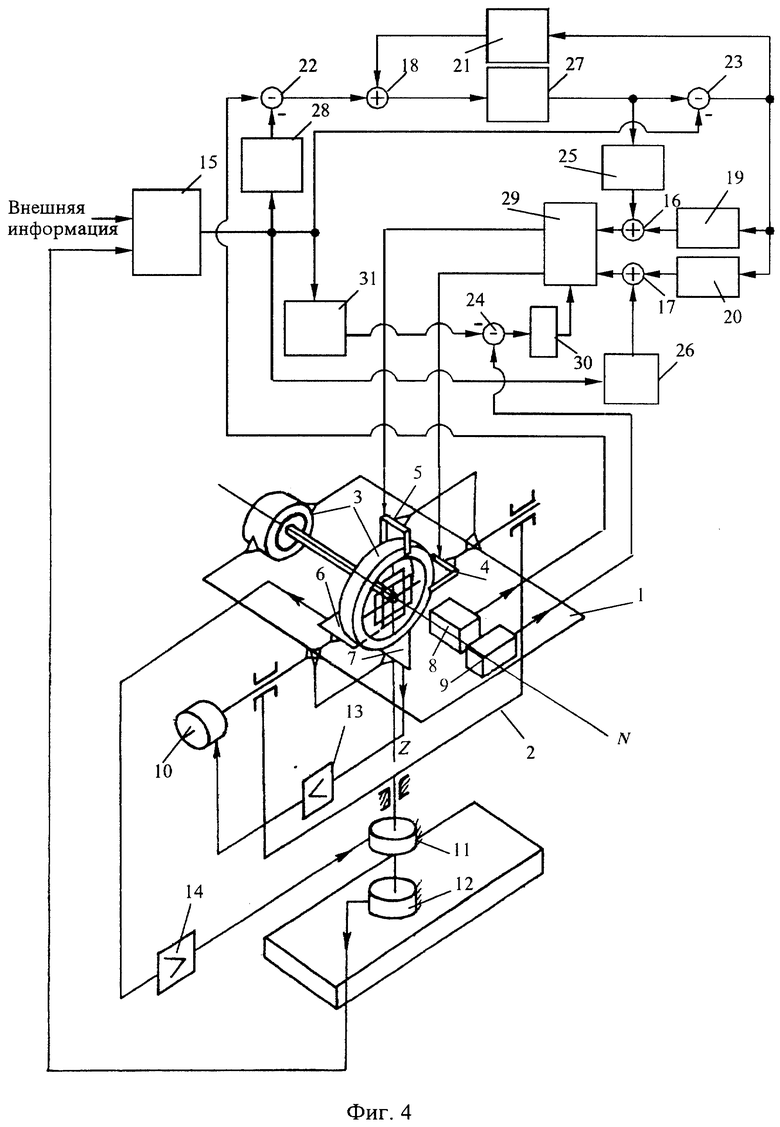
На фиг. 4 изображена функциональная схема примера конкретного исполнения заявленного устройства по второму варианту изобретения.
Одногироскопный корректируемый гирокомпас по первому варианту изобретения (фиг. 3) включает гироплатформу 1, обладающую нижней маятниковостью. "Северная" ось N платформы параллельна оси подшипников промежуточной горизонтальной рамки 2 карданового подвеса, вертикальная ось Z перпендикулярна плоскости платформы, "восточная" ось (на фиг. 3 не показана) лежит в плоскости платформы и перпендикулярна осям N и Z. На платформе установлен трехстепенный динамически настраиваемый гироскоп 3, кинетический момент которого параллелен "северной" оси платформы, а оси датчиков момента 4 и 5 и датчиков угла 6 и 7 параллельны вертикальной и "восточной" осям платформы. На платформе также установлен акселерометр 8, ось чувствительности которого параллельна "северной" оси платформы. На цапфе промежуточной горизонтальной рамки 2 карданового подвеса установлен двигатель стабилизации 9 вокруг "восточной" оси платформы. На цапфе наружной вертикальной рамки 10 карданового подвеса установлены двигатель стабилизации 11 вокруг вертикальной оси платформы и датчик угла курса 12. Гирокомпас включает также два усилителя стабилизации 13 и 14, устройство ввода внешней информации 15, три сумматора 16, 17, 18, три блока масштабирования 19, 20, 21, два блока вычитания 22, 23, блоки формирования восточной 24 и вертикальной 25 угловых скоростей, блок интегрирования 26, блок формирования северного компенсирующего ускорения 27, блок аналитической стабилизации 28 и блок вычисления наклона платформы вокруг "северной" оси 29.
Входы сумматора 16 соединены с выходами блоков масштабирования 19 и формирования восточной угловой скорости 24, а его выход - с первым входом блока аналитической стабилизации 28. Входы сумматора 17 соединены с выходами блоков масштабирования 20 и формирования вертикальной угловой скорости 25, а его выход - со вторым входом блока аналитической стабилизации 28. Выходы блока аналитической стабилизации 28 соединены с входами датчиков момента гироскопа вокруг "восточной" 5 и вертикальной 6 осей платформы. Выход устройства ввода внешней информации 15 соединен с: входом блока формирования вертикальной угловой скорости 25, вычитающим входом блока вычитания 23, входом блока формирования северного компенсирующего ускорения 27, входом блока вычисления наклона платформы вокруг "северной" оси 29. Входы устройства ввода внешней информации 15 соединены с внешними по отношению к гирокомпасу источниками информации о скорости объекта-носителя и широте его места и с выходом датчика угла курса 12. Выход сумматора 18 соединен с входом блока интегрирования 26, а его входы - с выходами блока масштабирования 21 и блока вычитания 22, вычитаемый вход которого соединен с выходом акселерометра 8, а вычитающий - с выходом блока формирования северного компенсирующего ускорения 27. Выход блока вычисления наклона платформы вокруг "северной" оси 29 соединен со свободным входом блока аналитической стабилизации 28. Выход блока интегрирования 26 соединен с вычитаемым входом блока вычитания 23 и входом блока формирования восточной угловой скорости 24. Выход блока вычитания 23 соединен с входами блоков масштабирования 19, 20, 21. Выход датчика угла гироскопа 6 вокруг вертикальной оси платформы соединен с входом первого усилителя стабилизации 14, выход которого соединен с двигателем стабилизации вокруг вертикальной оси платформы 11. Выход датчика угла гироскопа 7 вокруг "восточной" оси платформы соединен с входом усилителя стабилизации 13, выход которого соединен с двигателем стабилизации вокруг "восточной" оси платформы 9.
Одногироскопный корректируемый гирокомпас по второму варианту изобретения (фиг. 4) включает гироплатформу 1, "восточная" ось которой (на фиг. 4 не показана) совпадает с осью подшипников внешней вертикальной рамки 2 карданового подвеса, вертикальная ось Z перпендикулярна плоскости платформы, "северная" ось лежит в плоскости и перпендикулярна "восточной" и вертикальной осям. На платформе установлен трехстепенный динамически настраиваемый гироскоп 3, кинетический момент которого параллелен "северной" оси платформы, а оси датчиков момента 4 и 5 и датчиков угла 6 и 7 параллельны вертикальной и "восточной" осям платформы. На платформе установлены также два акселерометра: "северный" 8, ось чувствительности которого параллельна "северной" оси платформы и "восточный" 9, ось чувствительности которого параллельна "восточной" оси платформы. На цапфе платформы установлен двигатель стабилизации 10 вокруг "восточной" оси платформы. На цапфе наружной вертикальной рамки 2 карданового подвеса установлен двигатель стабилизации 11 вокруг вертикальной оси платформы и датчик угла курса 12. Гирокомпас включает также два усилителя стабилизации 13 и 14, устройство ввода внешней информации 15, три сумматора 16, 17, 18, три блока масштабирования 19, 20, 21, три блока вычитания 22, 23, 24, блоки формирования восточной 25 и вертикальной 26 угловых скоростей, блок интегрирования 27, блок формирования северного компенсирующего ускорения 28, блок аналитической стабилизации 29, блок вычисления наклона платформы 30 вокруг "северной" оси и блок вычисления восточного ускорения 31.
Входы сумматора 16 соединены с выходами блоков масштабирования 19 и формирования восточной угловой скорости 25, а его выход - с первым входом блока аналитической стабилизации 29. Входы сумматора 17 соединены с выходами блоков масштабирования 20 и формирования вертикальной угловой скорости 25, а его выход - со вторым входом блока аналитической стабилизации 29. Выходы блока аналитической стабилизации 29 соединены с входами датчиков момента гироскопа вокруг "восточной" 5 и вертикальной 6 осей платформы. Выход устройства ввода внешней информации 15 соединен с: входом блока формирования вертикальной угловой скорости 26, вычитающим входом блока вычитания 23, входом блока формирования северного компенсирующего ускорения 28 и входом блока вычисления восточного ускорения 31. Входы устройства ввода внешней информации 15 соединены с внешними по отношению к гирокомпасу источниками информации о скорости объекта-носителя и широте его места и выходом датчика угла курса 12. Выход сумматора 18 соединен с входом блока интегрирования 27, а его входы - с выходами блока масштабирования 21 и блока вычитания 22, вычитаемый вход которого соединен с выходом "северного" акселерометра 8, а вычитающий - с выходом блока формирования северного компенсирующего ускорения 28. Выход блока вычисления наклона платформы вокруг "северной" оси 30 соединен со свободным входом блока аналитической стабилизации 29. Выход блока интегрирования 27 соединен с вычитаемым входом блока вычитания 23 и входом блока формирования восточной угловой скорости 25. Выход блока вычитания 24 соединен с входами блоков масштабирования 19, 20, 21. Вычитаемый вход блока вычитания 24 соединен с выходом "восточного" акселерометра 9, его вычитающий вход - с выходом блока вычисления восточного ускорения 31, а его выход - с входом блока вычисления наклона платформы 30 вокруг "северной" оси. Выход блока вычисления наклона платформы 30 вокруг "северной" оси соединен со свободным входом блока аналитической стабилизации 29. Выход датчика угла гироскопа 6 относительно вертикальной оси платформы соединен с входом первого усилителя стабилизации 14, выход которого соединен с входом двигателя стабилизации вокруг вертикальной оси платформы 11. Выход датчика угла гироскопа 7 относительно "восточной" оси платформы соединен с входом усилителя стабилизации 13, выход которого соединен с двигателем стабилизации 10 вокруг "восточной" оси платформы.
Устройства ввода внешней информации, сумматоры, блоки вычитания, формирования восточной и вертикальной угловых скоростей, интегрирования, формирования северного компенсирующего ускорения, аналитической стабилизации, вычисления наклона платформы вокруг "северной" оси, вычисления восточного ускорения реализованы в ЦВМ.
Блок ввода внешней информации включает в свой состав аналогово-цифровые преобразователи для приема скорости V от лага и курса К от датчика курса, а также цифровой канал связи, например RS-232, для приема составляющих скорости VEви, VNви и широты Φви от спутниковой навигационной системы (СНС). В случае отсутствия информации от СНС северная и восточная скорости VNви, VEви вычисляются по формулам:
VNви = VcosK (1)
VEви = VsinK
а широта вычисляется по формуле:
Φви = ∫(VNви/R)dt (2)
где R - средний радиус Земли.
В блоке формирования северного компенсирующего ускорения значение северного компенсирующего ускорения вычисляется по формуле:
WNk = (2UsinΦви+(VEвиtgΦви)/R)VEви (3)
где U - модуль угловой скорости вращения Земли.
В блоке формирования восточной угловой скорости значение восточной абсолютной угловой скорости вычисляется по формуле:
ωE = -VN/R (4)
где VN - значение северной составляющей линейной скорости объекта, вычисленное блоком интегрирования.
В блоке формирования вертикальной угловой скорости значение вертикальной угловой скорости ωZ вычисляется по формуле:
ωZ = (UsinΦви+(VEвиtgΦви)/R) (5)
Выходные сигналы блоков масштабирования Y1, Y2, Y3 вычисляются по формулам:
Y1= a1(VN- VNви), (6)
Y2= a2(VN- VNви),
Y3= a3(VN- VNви),
где a1, a2, a3 - константы,
значение (VN - VNви) формируется блоком вычитания.
В блоке вычисления наклона платформы вокруг "северной" оси значение наклона платформы вокруг северной оси γ вычисляется по формулам: (7)
(7)
для первого варианта изобретения и
γ = arcsin(Yвх/G) (8)
для второго варианта изобретения,
где G - ускорение силы тяжести,
Yвх - входной сигнал блока, производная от значения восточной угловой скорости, полученной из устройства ввода внешней информации.
производная от значения восточной угловой скорости, полученной из устройства ввода внешней информации.
В блоке вычисления восточного ускорения (для второго варианта изобретения) формируется значение восточного ускорения aE по формуле: (9)
(9)
Блок аналитической стабилизации включает в свой состав преобразователи код-ток, формирующие сигналы управления на датчики момента гироскопа. Сигналы управления, подаваемые на датчики момента гироскопа, вычисляются по формулам:
DMZ = (pcosγ-rsinγ)m (10)
DME = (psinγ+rcosγ)m
где p, r - сигналы на входах блока, имеющие смысл восточной и вертикальной угловой скорости,
DMZ - сигнал, подаваемый на датчик момента гироскопа вокруг вертикальной оси,
DME - сигнал, подаваемый на датчик момента гироскопа вокруг "восточной" оси,
m - масштабный коэффициент, имеющий размерность [сила тока/угловая скорость].
Таким образом, в первом и втором вариантах изобретения управление гироскопом формируется по следующему алгоритму:
p = -VN/R + a2(VN - VNви)
r = (UsinΦви+(VEвиtgΦви)/R)+a3(VN-VNви)
для первого варианта изобретения (11)
для второго варианта изобретения
DMZ = (pcosγ-rsinγ)m
DME = (psinγ+rcosγ)m
где WN, WE - сигналы "северного" и "восточного" акселерометров соответственно.
Уравнения ошибок, соответствующие уравнениям (11) для случая отсутствия инструментальных погрешностей и погрешностей внешней информации, имеют вид:
 (12)
(12)
где δVN - погрешность выработки северной составляющей скорости,
β - угол между вектором кинетического момента и плоскостью горизонта,
α - погрешность выработки курса.
Соотношения (12) в правых частях не имеют членов, определяемых параметрами движения объекта, следовательно, заявленные компасы по первому и второму вариантам изобретения не возмущаются при маневрировании объекта. Отсутствие возмущаемости увеличивает в 2-4 раза точность заявленных компасов по сравнению с прототипами.
Нетрудно показать, что при реализации компаса без блока вычисления наклона платформы вокруг "северной" оси и блока аналитической стабилизации для первого варианта изобретения и без третьего блока вычитания, блоков вычисления восточного ускорения и наклона платформы вокруг "северной" оси уравнения ошибок имеют вид:
 (13)
(13)
где aE - восточное ускорение объекта-носителя.
Таким образом, в данном случае обеспечивается частичная невозмущаемость компаса - невозмущаемость только при наличии "северных" ускорений, что увеличивает в 1,5 -2 раза точность заявленных компасов по сравнению с прототипами.
Источник информации
1. Технические средства судовождения. Конструкция и эксплуатация. Под редакцией Е.Л.Смирнова. Санкт-Петербург, Элмор, 2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
| ГИРОАЗИМУТГОРИЗОНТКОМПАС | 2001 |
|
RU2202769C2 |
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |
| ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 2000 |
|
RU2157966C1 |
| АНАЛИТИЧЕСКИЙ ГИРОКОМПАС ДЛЯ КВАЗИСТАТИЧЕСКИХ ИЗМЕРЕНИЙ | 2009 |
|
RU2408843C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 2001 |
|
RU2187074C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
Изобретение относится к области навигационного приборостроения и может быть использовано при создании прецизионных одногироскопных корректируемых гирокомпасов. Гирокомпас по первому варианту содержит гироплатформу с нижней маятниковостью, помещенную в кардановый подвес с тремя степенями свободы. На платформе установлен трехстепенный гироскоп и акселерометр. Кардановый подвес снабжен двумя двигателями стабилизации и датчиком угла курса. Гирокомпас также включает блок интегрирования, два усилителя стабилизации, устройство ввода внешней информации, три сумматора, два блока вычитания, три блока масштабирования, блоки формирования "восточной" и вертикальной угловых скоростей, блоки формирования "северного" компенсирующего ускорения и аналитической стабилизации, блок вычисления наклона платформы вокруг "северной" оси. Гирокомпас по второму варианту содержит гироплатформу, помещенную в кардановый подвес с двумя степенями свободы. На гироплатформе установлены два акселерометра. Гирокомпас в частном случае включает дополнительно блок вычитания и блок вычисления восточного ускорения. Обеспечивается повышение точности гирокомпаса за счет устранения его возмущаемости при маневрировании объекта. 2 с. и 2 з.п. ф-лы, 4 ил.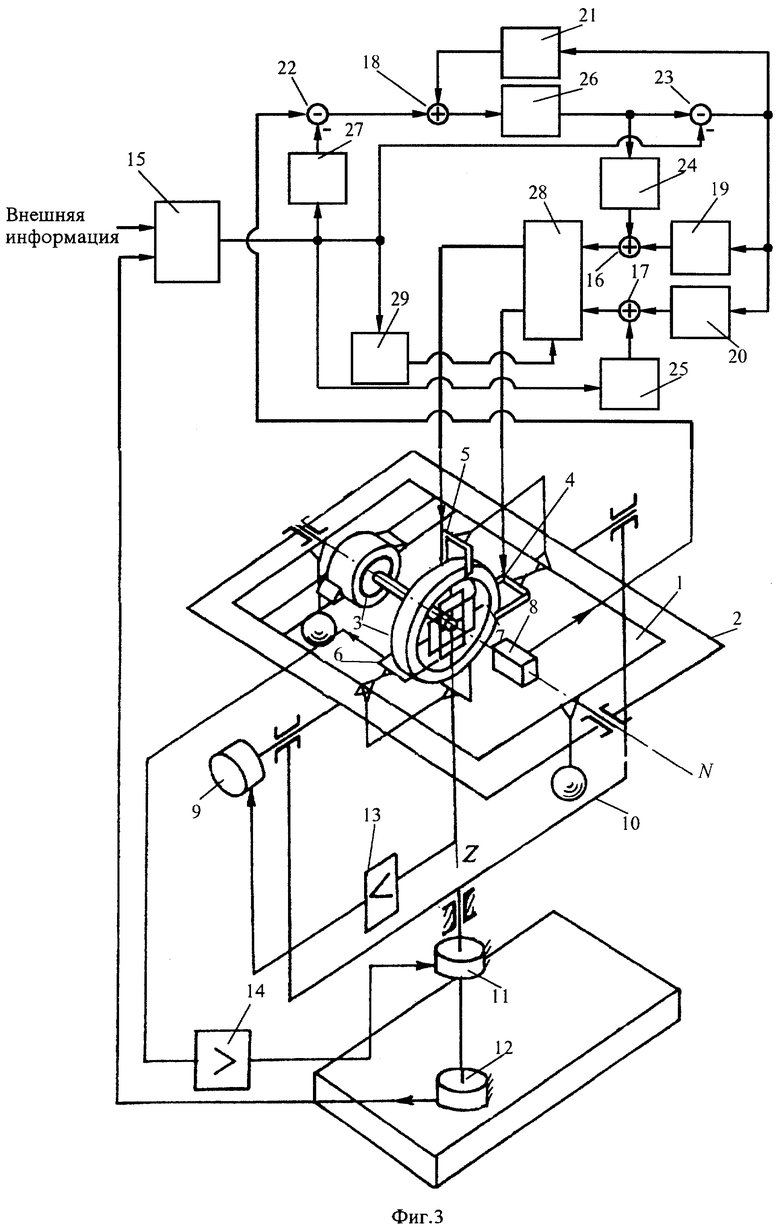
| Технические средства судовождения | |||
| Конструкция и эксплуатация | |||
| /Под ред | |||
| Е.Л.Смирнова | |||
| - С.-Пб.: Элмор, 2000, с | |||
| Держатель для поленьев при винтовом колуне | 1920 |
|
SU305A1 |
| Железнодорожный снегоочиститель на глубину до трех сажен | 1920 |
|
SU263A1 |
| RU 2063612 C1, 10.07.1996 | |||
| ГИРОГОРИЗОНТКОМПАС | 1993 |
|
RU2051330C1 |
| RU 2073206 C1, 10.02.1997 | |||
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОЙ СВАРКИ ЖЕЛЕЗНЫХ ТРУБ | 1927 |
|
SU9521A1 |
| Головка симметричного между вагонного штепсельного соединения для электрических проводов | 1928 |
|
SU13422A1 |
| DE 3033280 A, 22.01.1982. | |||

