Изобретение относится к измерительной технике и может быть использовано в машиностроении, станкостроении и приборостроении, когда требуется выставить отражатель перпендикулярно оси поворота вала с ограниченным углом поворота,
Известен способ выставления отражателя перпендикулярно оси поворота вала, в котором отражатель устанавливается на поверхность вала посредством нерегулируемого приспособления. Недостатком данного способа является наличие погрешности выставления отражателя, обусловленной погрешностью нерегулируемого приспособления.
Известен способ, согласно которому отражатель устанавливается на вал с помощью регулируемой оправы. Юстировку
регулировочными винтами оправы проводят до тех пор, пока автоколлимационное изображение сетки от отражателя не перестанет выходить из допусковой окружности в поле зрения автоколлиматора при полном обороте вала вокруг своей оси. Однако существует механизмы, например механизмы с упругими опорами и др., угол поворота валов которых ограничен (менее 90 град.).
Цель изобретения - расширение функциональных возможностей за счет обеспечения выставления отражателя перпендикулярно оси поворота вала с ограниченным углом поворота.
Указанная цель достигается тем, что из- гмеряют в плоскости сетки автоколлиматора координаты трех точек, в которых располагаются автоколлимационные изображения
XJ
СП
ел о -N со
сетки при начальном положении вала и после его поворота-в два крайних положения, составляют уравнения прямых, перпендикулярных отрезкам, которые соединяют каждые из двух соседних точек расположе- ния автоколлимационных изображений сетки, и проходящих через их середины, а определение координат оси поворота вала «производят посредством решения системы полученных уравнений.
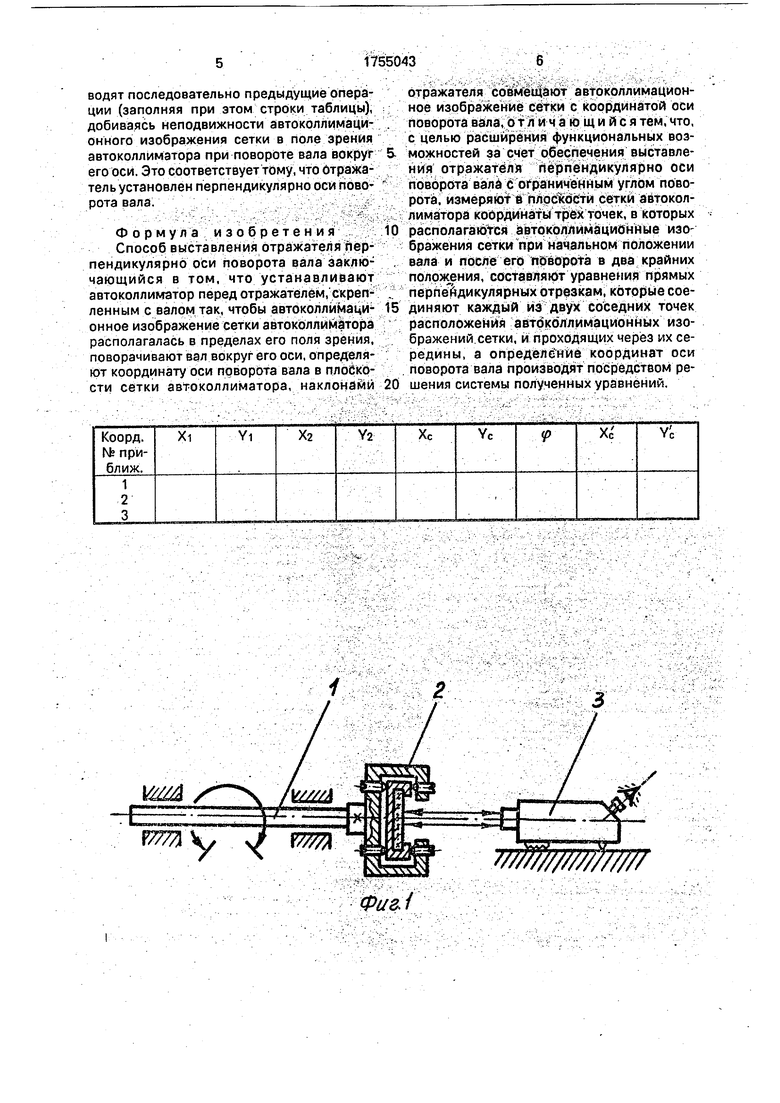
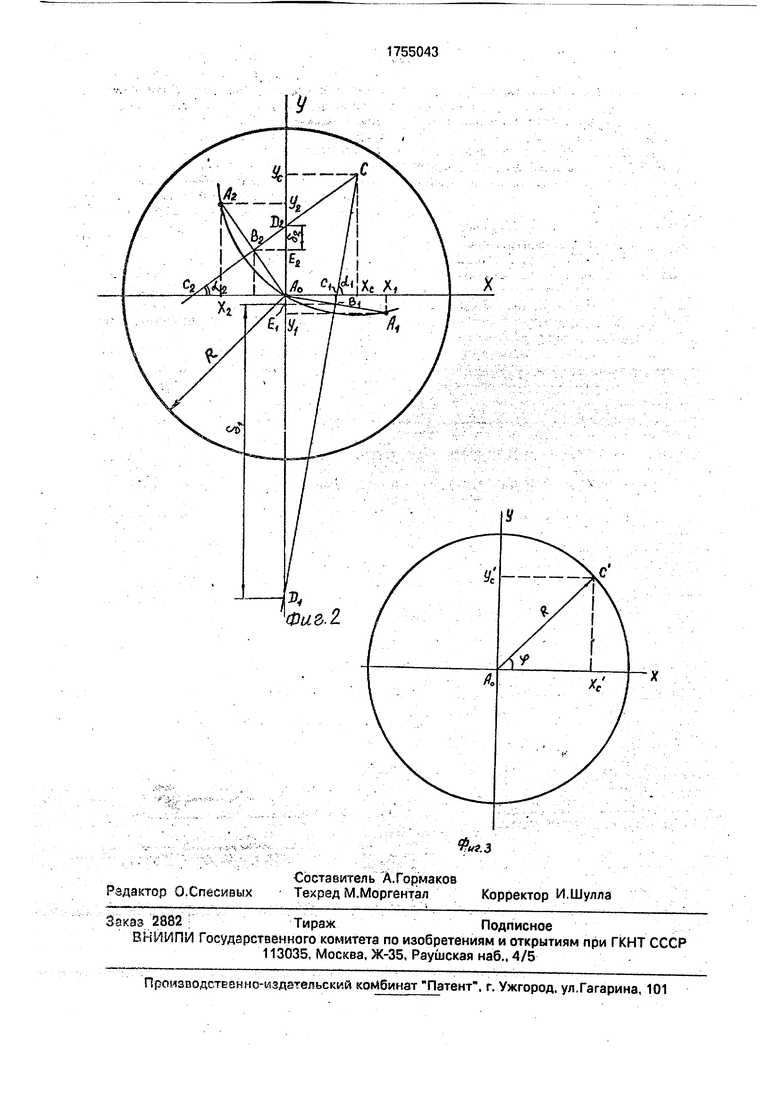
На фиг.1 показа ft а схема выставления отражателя перпендикулярно оси поворота вала; на фиг.2 - поле зрения автоколлима- то ра при определении координат оси поворота вала с поясняющими геометрическими построениями; на фиг.З - поле зрения автоколлиматора с первым приближением координат оси поворота вала.
Изобретение осуществляется следующим образом. На вал 1 (фиг.1) с ограничен- ным углом поворота укрепляют отражатель 2 в регулируемой оправе, поверхность которого приблизительно перпендикулярна оси поворота вала. Перед отражателем 2 устанавливают автоколлиматор 3 так, чтобы ав- токоллимационое изображение сетки автоколлиматора располагалось в пределах его поля зрения. Механизмами угловых перемещений автоколлиматора 3 совмещают центр автоколлимационного изображения сетки с центром самой сетки автоколлиматора в точке АО (фиг.2) с координатами Х0 О, YO 0. Поворачивают вал в два крайних положения. При этом автоколлимационное изображение сетки фиксируется в двух точ- ках AI и А2, координаты XL Yi и Х2, Y2 которых записывают в таблицу.
Составляют уравнения прямых перпендикулярным отрезкам A0Ai и А0А2 (фиг.2), которые соединяют каждые из двух сосед- них точек расположения автоколлимационных изображений сетки, и проходящих через их середины в точках Bi и 82 соответственно, Координаты оси поворота вала Xc.Yc определяют посредством решения полученных уравнений. Для этого проводят вычисления по следующему алгоритму: - определяют углы наклона прямых (фиг.2) перпендикулярных отрезкам A0Ai и А0А2
«1 90° ± arctgYi
Xil
-,дляш 90°знак -и
02. arctg 2 . для as. 90° 55
I л2
вычисляют угловые коэффициенты прямых Ki tgori; K2 tgoz;
при at, ai 90° Ki и К2 0;
при «1, Oi - 90° Ki и К2 ±
при «1, аи 90° Ki и К2 0;(2)
вычисляют абсолютные значения ординат
3i I Ki I I Xi I; 62 К21 I Х21; (3)
вычисляют абсолютные значения ординат точек пересечения прямых с осью Y
lbil - -lYil + I Y2I + I&I;
(4)
присваивают ординате bi знак ординаты Yi: ординате 02 присваивают знак ординаты Ya; вычисляют искомые координаты XcYc с учетом ЗНаКОВ Ki, K2, bi И D2
+ b . (5
Приведенный алгоритм справедлив для расположения точек AI и А2 в любых квадрантах поля зрения автоколлиматора
Если рассчитанные координаты оси поворота вала находятся за пределами поля зрения автоколлиматора, то первое приближение координат оси поворота вала С (Xc.Yc) определяют по выражениям
Хс R cos p; Yc R - sin (p,
(6)
где R - угол поля зрения автоколлиматора, угол (р рассчитывают по выражению
Yc р arc tg -;
AC
(7)
Возвращают вал в начальное положение (точка АО). При этом автоколлимационное изображение сетки должно совпадать с самой сеткой автоколлиматора Вращением регулировочных витов оправы 2 отражателя (фиг.1) приводят автоколлимационное изображение сетки в точку С с координатами Хс, Yc, или в точку С (фиг.З) с координатами Хс, YC. Механизмом угловых перемещений автоколлиматора совмещают автоколлимационное изображение сетки с самой сеткой автоколлиматора Далее проводят последовательно предыдущие операции (заполняя при этом строки таблицы), добиваясь неподвижности автоколлимаци- онного изображения сетки в поле зрения автоколлиматора при повороте вала вокруг его оси. Это соответствует тому, что Отражатель установлен перпендикулярно оси пово- рота вала.
Формула изобретения
Способ выставления отражателя перпендикулярно оси поворота вала заключающийся в том, что устанавливают автоколлиматор перед отражателем, скреп- ленным с валом так, чтобы автоколлимаци- онное изображение сетки автоколлиматора располагалась в пределах его поля зрения, поворачивают вал вокруг его оси, определяют координату оси поворота вала в плоскости сетки автоколлиматора, наклонами
отражателя совмещают автоколлимационное изображение сетки с координатой оси поворота вала, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения выставления отражателя перпендикулярно оси поворота вала с ограниченным углом поворота, измеряют в плоскости сетки автоколлиматора координаты трех точек, в которых располагаются автоколлимационные изображения сетки при начальном положении вала и после его поворота в два крайних положения, составляют уравнения прямых перпендикулярных отрезкам, которые соединяют каждый из двух соседних точек расположения автокбллимационных изображений сетки, и проходящих через их середины, а определение координат оси поворота вала производят посредством решения системы полученных уравнений.
Изобретение относится к измерительной технике и может быть использовано в машиностроении. Целью изобретения является расширение функциональных возможностей за счет обеспечения выставления отражателя перпендикулярно оси поворота вала с ограниченным углом поворота. Перед отражателем, скрепленным с валом устанавливают автоколлиматор. Поворачивают вал в два крайних положения, при этом определяют координаты XiYi и XaY2 положения автоколлимационного изображения сетки. Затем составляют уравнения прямых перпендикулярным отрезкам, которые соединяют каждые из двух соседних точек расположения автоколлимационных изображений сетки, и проходящих через их середины, определяют координату оси поворота вале посредством решения системы полученных уравнений, после чего совмещают автоколлимационное изображение сетки С этой координатой наклонами отражателя. 1 табл., 3 ил. ел С
Ьм//#////7Щ
Фи&1
| Абаджи Х.И | |||
| и др | |||
| Контроль взаимного расположения поверхностей деталей машин | |||
| Л.; Госгортехиздат, 1962, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Петров В.П | |||
| Контроль качества и испытание оптических приборов | |||
| Л.: Машиностроение, Ленинград, отделение, 1985, с | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
