Изобретение относится к геофизике, а именно к контролю магнитной индукции постоянных магнитов сейсмоприемников в процессе их сборки и эксплуатации, и может найти применение в геофизическом приборостроении, сейсмометрии, а также в технике определения характеристик магнитных систем с постоянными магнитами.
Известен способ определения магнитной индукции, включающий изготовление измерительного датчика в виде ампулы с жидкостью и охватывающей ее катушки, подачу в катушку сигнала с высокочастотного генератора до резонансного совпадения с частотой f прецессии ядер атомов вещества жидкости, усиление сигнала, фазочувст- вительное выпрямление и измерение частоты. Способ использует связь частоты f прецессии ядер с магнитной индукцией:
0)
В-Йггде у - гиромагнитное отношение магнитного момента ядра атомов данного вещества к моменту движения.
Наиболее близким к предлагаемому является способ определения магнитной индукции, основанный на периодическом
перемещении измерительной катутики в магнитном поле, включающий изготовление измерительной катушки, закрепление ее на торце пьезоэлектрического кристалла, помещение катушки в зазор измеряемого магнита, подачу на вибратор сигнала от генератора гармонических колебаний, усиление выходного сигнала с катушки, детектирование, интегрирование и измерение сигнала в единицах магнитной индукции. К недостаткам способа, кроме погрешностей детектирования сигнала, можно отнести пониженную достоверность из-за отличия режима контроля магнитов от их условий работы в реальных сейсмоприемниках. Целью изобретения является повышение точности при измерении магнитной индукции магнитов сейсмоприемников. Указанная цель достигается тем, что в способе измерения магнитной индукции постоянных магнитов, включающем возбуждение, путем подачи электрического сигнала, колебаний датчика магнитной индукции, измерительная катушка которого с известным параметром k помещена в зазор магнита, измерение выходного сигнала Ем с катушки и определение магнитной индукции В, в ка(Л
С
vj ел ел ю
ю
честве датчика магнитной индукции используют колебательный механизм сейсмопри- емника, возбуждение осуществляют путем подачи ступени постоянного тока I. размером, обеспечивающим отклонение колебательного механизма в пределах рабочего диапазона амплитуд, измерение выходного сигнала проводят о режиме собственных колебаний после выключения тока I, а значение магнитной индукции находят по фбрмуле
, I
где постоянная С определяется для сейс- моприемников поступательного вида по формуле:,
m w0 e
, 2
а для сейсмоприемников вращательного вида по формуле:
К и) е
nJlfi
2
где К - момент инерции;
ub - круговая частота собственных колебаний;
L- расстояние от точки подвеса до центра катушки;
р - степень затухания;
fi - номер измеряемой амплитуды выходного сигнала;
m - масса подвижного инертного тела.
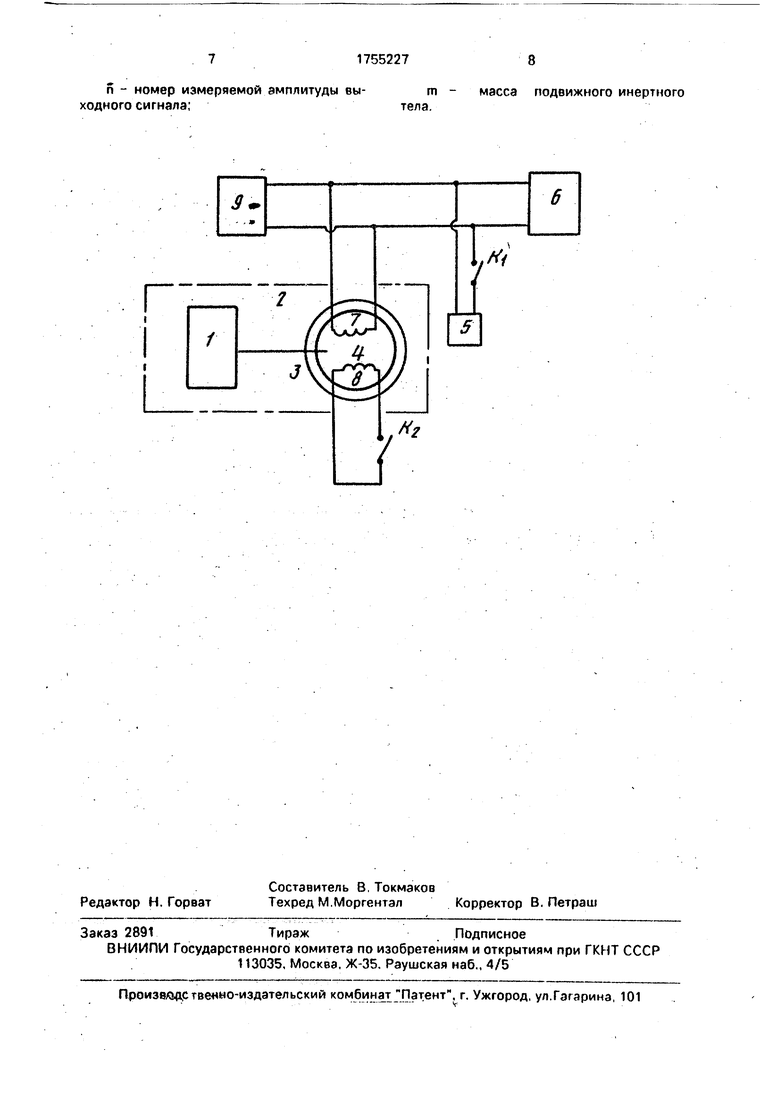
Способ реализуется с помощью устройства, структурная схема которого показана на чертеже. На чертеже обозначено: колебательный механизм 1 сейсмоприемника, на основании 2 которого установлен контролируемый магнит 3, измерительная катушка 4. жестко закрепленная на колебательном механизме, являющемся датчиком магнитной индукции, источник постоянного тока 5 с ключом Ki, измеритель б ЭДС Ем. На измерительной катушке 4 показана измерительная обмотка 7 с известным параметром k и обмотка успокоения 8 с ключом К2. К измерительной катушке может быть подключен осциллограф 9 для контроля формы синусоиды и состояния успокоения колебательного механизма. В схему может быть введено решающее устройство с выводом полученного значения магнитной индукции В на цифровой индикатор.
В основу способа положен закон электромагнитной индукции, согласно которому а процессе перемещения измерительной катушки в линейном поле постоянного магнита при условии взаимной перпендикуляр0
5
0
5
0
ности векторов скорости перемещения и плотности потока магнитной индукции в катушке наводится электродвижущая сила Е, равная
E Bnlcx,(2)
где В - магнитная индукция:
п - число витков катушки;
1С - средняя длина одного витка,
х - скорость перемещения катушки.
Заметив, что отношение Е/Ј определяет величину S - чувствительность сейсмоприемника, магнитную индукцию В можно представить в виде:
в-тйили В k-S, (3)
где k -j- параметр катушки.
Входящая в формулу (3) чувствительность S в явном виде не удобна для массового контроля магнитов, поскольку требует определения с контролируемым магнитом. Из выражения для переходного процесса колебательного механизма с измерительной катушкой при условии возбуждения ступенькой тока можно получить зависимость (для сейсмоприемника с посту- па те л ь н ):
у
4
m w0 e
подставив которое в формулу (3) получим:
35
В k- m о)0 е
/SoAjtmiy
или
в су15Г
(4)
где постоянная С определяется для сейсмоприемника с поступательным перемещением инертной массы формулой:
tm
С kijm ofe е,(5)
g для сейсмоприемника с вращательным перемещен ием ф ормулой:
К I/ йЛ т
C-f-JKttfee(6)
В этих соотношениях: m - масса колебательной системы для поступательного сейсмоприемника, k - момент инерции маятника вращательного сейсмоприемника, аь - круговая частота собственных колебаний, L - расстояние от точки подвеса маятника до центра измерительной катушки. степень затухания колебательного механизма, лишенного успокоения, tm - время достижения максимума, Ем - значение ЭДС в максимуме.
Величина С является постоянной колебательного механизма с измерительной катушкой. Поскольку степень затухания ft весьма мала (порядка 0,01), с хорошей степенью точности можно принять
° 4
где То - период собственных колеба- п
Ok,
tm
Mo ний. Тогда tm
В этом случае выражения для постоянной С
упрощаются:
для поступательного сейсмоприемника
пЯ/
С Ыт OJb e
для вращательного сейсмоприемника
С jKuJ -e
В принципе коэффициент С может учитывать любую амплитуду колебаний в экспо- ненциальном множителе. Но для сокращения времени, повышения точности и удобства аппаратурной реализации достаточно измерять значение первой амплитуды EI. Тогда п 1.
Важным обстоятельством является то, что абсолютная точность измерения магнитной индукции определяется постоянной погрешностью определения величины С, а относительная погрешность массового контроля магнитов определяется случайными погрешностями измерения ЭДС Ем (при закрепленном для данного типа магнитов значения тока I в пределах рабочего диапазона амплитуд), которая при современной технике измерения может быть сведена к 0,1 %.
Способ осуществляют следующим образом.
Контролируемый магнит 3 устанавливают на основании 2, помещают измерительную катушку в зазор магнита, замыкают ключ К2. замыкают ключ Ki и подают от источника тока 5 постоянный ток известной величины i в измерительную обмотку 7, отклоняющий колебательный механизм в пределах рабочего диапазона амплитуд. После успокоения механизма 1 размыкают ключ и измерителем 6 измеряют выходной сигнал EI, соответствующий амплитуде первого колебания, а значение магнитной индукции В находят по формуле (4).
Практически под устройство для контроля магнитов был приспособлен сейсмоп- риемник СМ-ЗКВ без внешнего кожуха, маятник которого со специально изготовленной измерительной катушкой и разме0
щенной обмоткой в центре катушки (f Шир и- ной, меньшей высоты полюсного наконечника магнита, использовался в качестве датчика магнитной индукции.
Возможное влияние городских микро- сейсм оценивалось из следующих положений: максимальный уровень микросейсм в дневное время в условиях г. Москвы составляет около 0,6 мкм. При чувствительности измерительного устройства Sc
81 -
В -с
m
на частоте 1 Гц шумовая ЭДС
5
0
5
0 5 0
5 0 5
равна 0,5 мВ. Измерение индукции проводи-, лось при токе 0,5 мА и сигнале ЭДС около 500 мВ. Следовательно, в наихудших уелови ях городских микросейсм их доля при измерениях не превышала 0,1 % от полезного сигнала. Формула изобретения Способ измерения магнитной индукции постоянных магнитов, включающий возбуждение колебаний путем подачи электрического сигнала датчика магнитной индукции, измерительная катушка которого с известным параметром к помещена в зазор магнита, измерение выходного сигнала Ем с катушки и определение магнитной индукции В,отличающийся тем, что, с целью повышения точности при измерении магнитной индукции магнитов сейсмоприемни- ков, в качестве датчика магнитной индукции используют колебательный механизм сейсмоприемника. возбуждение осуществляют путем подачи ступени постоянного тока I, величиной, обеспечивающей отклонение колебательного механизма в пределах рабочего диапазона амплитуд, измерение выходного сигнала Ем проводят в режиме собственных колебаний после выключения тока i, а значение магнитной индукции находят по формуле
В С Y E .
где С - постоянная, определяемая для сей- смоприемников поступательного вида по
формуле f
Iпл:/
С Щт e 2
а для сейсмоприемников вращательного вида по формуле:
Гjur/r1
С |Цк«-е 2
где К - момент инерции;
- круговая частота собственных колебаний;«« --.-.
L- расстояние от точки подвеса до центра катушки;
ft- степень затухания;
n - номер измеряемой амплитуды вы-m ходиого сигнала;тела.
масса подвижного инертного

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕРКИ ЭЛЕКТРОДИНАМИЧЕСКИХ СЕЙСМОПРИЕМНИКОВ | 1992 |
|
RU2031418C1 |
| Способ калибровки сейсмических каналов с записью на промежуточный носитель | 1989 |
|
SU1755229A1 |
| Устройство для определения физических свойств веществ | 1981 |
|
SU949419A1 |
| Устройство проверки идентичности сейсмоприемников | 1989 |
|
SU1651256A1 |
| Устройство для определения параметров сейсмоприемников | 1975 |
|
SU557342A1 |
| Электродинамический преобразовательный блок сейсмоприемника ускорений | 1989 |
|
SU1720037A1 |
| Способ определения коэффициента преобразования электродинамического сейсмоприемника | 1983 |
|
SU1123006A1 |
| Вибрационное устройство для определения физических свойств веществ | 1976 |
|
SU609078A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 2008 |
|
RU2377506C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ МАЛЫХ ЛИНЕЙНЫХ РАЗМЕРОВ | 2014 |
|
RU2564823C1 |
Использование: геофизическое приборостроение, сейсмометрия, виброметрия при определении характеристик магнитных систем с постоянными магнитами. Сущность изобретения: при измерении магнитной индукции в качестве датчика используют колебательный механизм сейс- моприемникз с известными параметрами измерительной катушки, путем анализа максимума его отклика на ступеньку тока известной величины, проведенного в режиме свободных колебаний. 1 ил,
Г
| Электрические измерения/Под, ред | |||
| А.В.Фремке | |||
| Л.: Энергия | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| САННЫЙ ВЕЛОСИПЕД С ВЕДУЩИМ КОЛЕСОМ, СНАБЖЕННЫМ ШИПАМИ | 1921 |
|
SU265A1 |
| БСЭ, том.15, с.193, М., 1974 | |||
