Изобретение относится к области электротехники, а более точно к линейным асин- хронным электроприводам, и предназначено для использования в робототехнике.
Известны линейные асинхронные электроприводы, содержащие индукторы, состоящие из магнитопроводов с полюсами и трехфазными обмотками, и якори.
Наиболее близким по технической сущности к заявляемому является линейный асинхронный электропривод, содержащий индуктор, состоящий из магнитопроеода с полюсами и трехфазной обмоткой, якорь и коммутирующее устройство. Этот электропривод принят в качестве прототипа.
Невысокая точность позиционирования и фиксации якоря - недостатки прототипа.
Цель изобретения - повышение точности позиционирования и фиксации якоря.
Указанная цель достигается тем, что в линейном асинхронном электроприводе, содержащем индуктор, состоящий измагни- топровода с полюсами и трехфазной обмоткой, якорь и коммутирующее устройство, трехфазная обмотка индуктора выполнена из отдельных катушек, охватывающих полюсы магнитопровода индуктора, начала которых соединены с клеммами для подключения нулевого провода источника питания, а концы каждой катушки соединены через замыкающий контакт коммутирующего устройства с общей точкой подключения размыкающих контактов трех фаз, соединенных с клеммами для подключения соответствующих фаз источника питания, причем управляющий блок
коммутирующего устройства выполнен с возможностью одновременного подключения для фиксации якоря пяти фазных катушек, образующих ряд, у которого до середины один, а после середины - противоположный порядок следования фаз, причем для начала шага - с возможностью отключения последней катушки ряда, а для завершения шага - с возможностью одновременно отключения первой катушки ряда, подключения последней катушки ряда и катушки, следующей за последней катушкой ряда, где край якоря расположен над первой катушкой ряда,
Полюсы магнитопровода индуктора снабжены направляющими роликами.
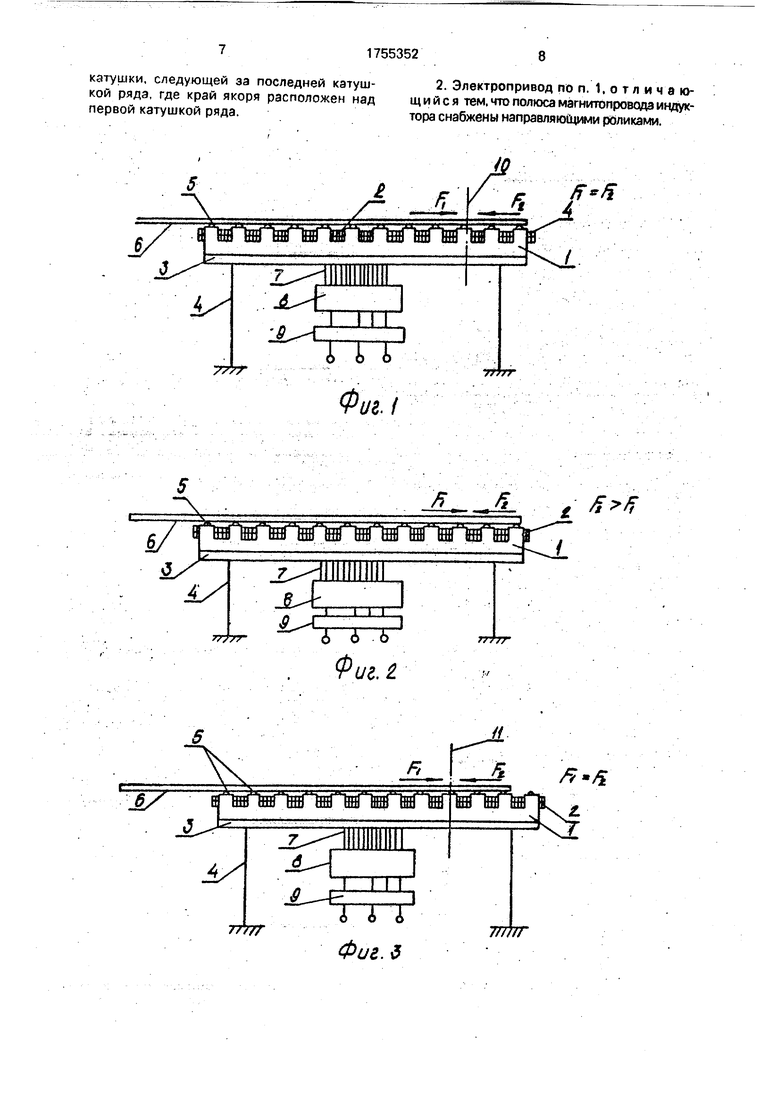
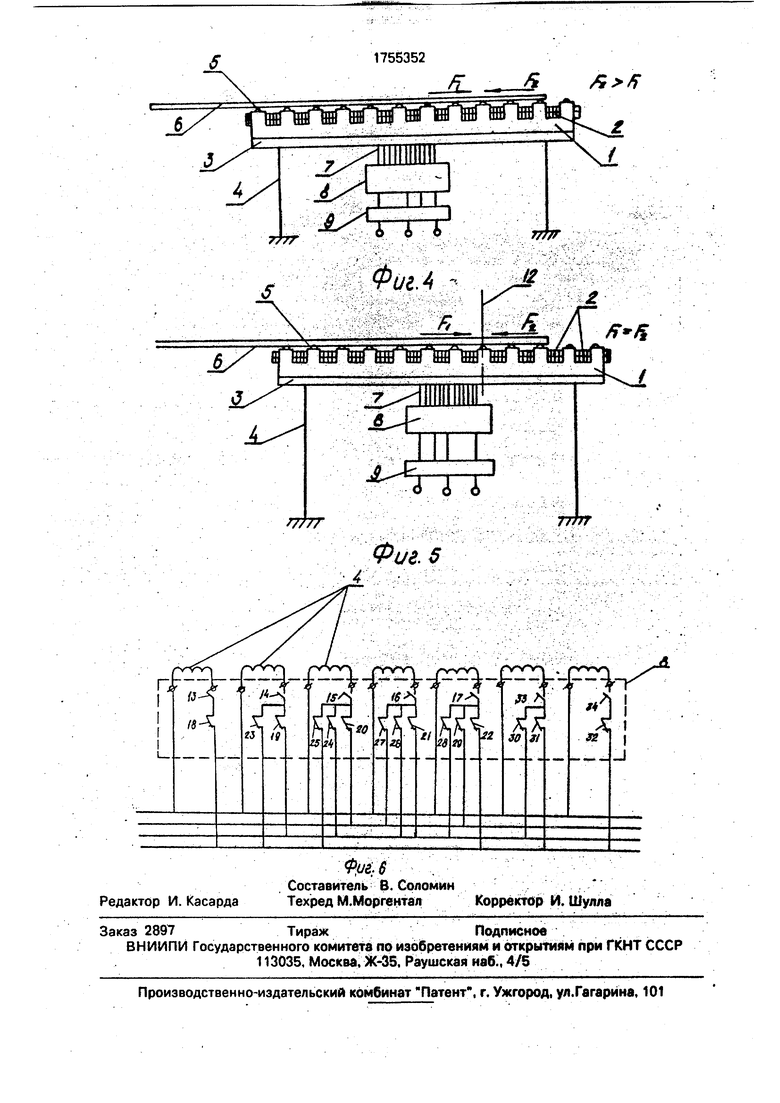
На фиг. 1 изображен общий вид линейного асинхронного электропривода с фиксированным положением якоряТна фиг. 2 - общий вид электропривода с отключенной последней катушкой ряда для начала шага; на фиг. 3 - общий вид линейного асинхронного электропривода с зафиксированным якорем после завершения первого шага; на фиг. 4 - общий вид линейного асинхронного электропривода с отключенной последней катушкой ряда для совершения второго шага; на фиг. 5 - общий вид линейного асинхронного электропривода с зафиксированным якорем после завершения второго шага; на фиг. б - схема подключения катушек обмотки индуктора посредством коммутирующего устройства к источнику трехфазного напряжения.
Индуктор линейного асинхронного двигателя содержит сердечник 1 и трехфазную обмотку, состоящую из отдельных катушек 2, охватывающих полюсы сердечника (магнитопровода) 1. Индуктор жестко закреплен на станине 3, размещенной на стойках 4, На полюсах магнитопровода 1 установлены направляющие ролики 5, на которых размещен якорь 6. Каждая катушка 2 трехфазной обмотки имеет два вывода 7, соединенных с коммутирующим устройством 8, электрически соединенным с источником трехфазного напряжения 9. Начала каждой катушки 2 соединены с клеммами для подключения нулевого провода источника напряжения 9, а концы каждой катушки 2 соединены через замыкающие контакты (на фиг. 1 не показаны) с общей точкой подключения размыкающих контактов трех фаз. Одновременно подключены к источнику напряжения пять фазных катушек 2, размещенных на пяти крайних полюсах (справа налево) магнитопровода 1. При этом до середины ряда образован прямой, а после середины - противоположный порядок следования фаз. Якорь б в данном положении зафиксирован
относительно оси 10. действующие на него усилия FI и FZ одинаковы по величине и уравновешивают друг друга.
Начало совершения первого шага якоря
5 6 (фиг. 2) осуществляется при отключении последней катушки 2 ряда Усилие F2 больше чем FL
Линейный асинхронный электропривод после завершения первого шага изображен
10 на фиг. 3. Здесь первая катушка 2 первоначального ряда отключена, а следующая за последней (левой) катушкой первоначального ряда подключена к источнику напряжения 9. Образовался новый ряд из пяти
15 катушек 2. Усилия FI и F2 снова уравновешивают друг друга, фиксируя якорь 6 в новом положении относительно оси 11
На фиг. 4 показано начало совершения второго шага. Последняя (левая) катушка 2
20 нового ряда из пяти катушек 2 отключена, равенство сил FI и Fa нарушается и якорь 6 начинает движение.
На фиг. 5 показан электропривод после завершения второго шага: якорь 6 зафикси5 рован относительно оси 12, проходящей через центр третьего ряда из пяти подключенных к источнику 9 катушек 2. Усилия, действующие на якорь 6, снова уравновешивают друг друга.
0 Схема подключения катушек 2 индуктора электропривода к коммутирующему устройству 8 показана на фиг. 6. Показаны четыре провода. Причем верхний провод является нулевым, а нижние - фазными. Под
5 нулевым проводом расположен провод фазы А, затем В и С. Для фиксированного положения якоря б, соответствующего фиг 1, замкнуты замыкающие контакты 13, 14, 15, 16 и 17 и размыкающие контакты 18, 19,20,
0 21 и 22. Разомкнуты размыкающие контакты 23. 24, 25, 26, 27, 28. 29. 30. 31 и 32 и разомкнуты замыкающие контакты 33 и 34.
Управление контактами коммутирующего устройства может осуществляться раз5 личными реле, могут быть использованы и бесконтактные коммутаторы. Для осуществления большого числа шагов линейного электропривода управление коммутацией катушек может осуществляться при помощи
0 микропроцессоров.
Линейный асинхронный электропривод работает следующим образом.
Для точной фиксации якоря 6 (фиг. 1 и 6) замыкаются замыкающие контакты 13, 14,
5 15.16 и 17 и остаются замкнутыми размыкающие контакты 18,19, 20. 21 и 22, размыкаются размыкающие контакты 23, 24, 25, 26, 27,28,29,30.31 и 32. Разомкнуты замыкающие контакты 33 и 34. При этом первые пять катушек 2 обмотки индуктора подключаются к источнику напряжения 9, образуя ряд. у которого до середины один, а после середины - противоположный порядок следования фаз, т е. до середины ряда будет порядок следования фаз С, В, А, а после середины - противоположный порядок следования фаз А, В, С.
Токи, протекающие по катушкам ряда, возбуждают бегущие навстречу друг другу магнитные поля, пересекающие якорь 6 и наводящие в нем электродвижущие силы, под действием которых в якоре потекут трехфазные вихревые токи, вступающие во взаимодействие с бегущими навстречу друг другу магнитными полями. В результате этого взаимодействия создается пара усилий FI и Р2уприложениых к якорю. Эти усилия равны по величине и уравновешивают друг друга, фиксируя якорь 6 относительно оси 10. Если якорь 6 под действием каких- либо сил сместится относительно оси 10, то равновесие этих сил нарушится и под действием разности сил якорь 6 вернется в прежнее положение
Для осуществления первого шага якоря 6 (фиг. 2 и 6) размыкают замыкающий контакт 17, все остальные контакты остаются в прежнем положении. При этом отключаются от источника напряжения последняя (крайняя левая) катушка 2 первоначально го ряда. Равновесие сил FI и Fa нарушается из-за ослабления магнитного потока, бегущего слева направо Сила F2 становится больше силы FI Под действием разности этих сил якорь 6 начинает перемещаться влево и будет двигаться до тех пор, пока силы FI и F2 не станут равными, Это произойдет, когда якорь 6 переместится влево на величину (длину) одного полюса.
Для точной электромагнитной фикса- ции якоря (фиг. 3 и 6) размыкается замыкающий контакт 13, отключая первую катушку 2 (крайнюю справа) первоначального ряда от источника напряжения. При этом замкнуты замыкающие контакты 14, 15, 16, 17, 33; замкнуты размыкающие контакты 23,24,27, 28 и 31. Разомкнуты размыкающие контакты 18, 20, 19, 21, 22, 25, 26, 30 и 32. Обрадуется новый ряд из пяти катушек, у которого до середины ряда один, а после середины противоположный порядок следования фаз. Возбуждаются одинаковые, бегущие навстречу друг другу, магнитные поля, пересекающие якорь 6 и наводящие электродвижущие силы. По якорю текут то- ки, взаимодействующие с бегущими магнитными полями, в результате чего создаются усилия FI и F2, одинаковые по величине, направленные навстречу друг другу и взаимно уравновешивающие друг друга. Якорь
6 фиксируется относительно оси 11 в новом положении.
Для осуществления следующего шага (фиг. 4 и 6) размыкается замыкающий контакт 33 и от источника питания отключается последняя катушка ряда. Равновесие усилий Ft и F2 нарушается и под действием разности этих сил якорь 6 будет двигаться влево до взаимного уравновешивания усилий. Положение остальных контактов остается тем же, что и при фиксации якоря 6 после завершения первого шага.
Для фиксации якоря 6 (фиг. 5 и 6) замыкаются замыкающие контакты 15.16,17,33 и 34, замкнуты размыкающие контакты 25, 26, 29, 30 и 32; разомкнуты замыкающие контакты 13 и 14, разомкнуты замыкающие контакты 20,21,22,24,27,28 и 31. При этом образуется новый ряд из пяти катушек, у которого до середины ряда один, а после середины - противоположный порядок следования фаз. Усилия FI и Fa взаимно уравновешиваются и якорь 6 фиксируется в новом положении относительно оси 12. И так далее.
Достигнута возможность повышения точности позиционирования якоря и его электромагнитной фиксации.
Формула изобретения
Линейный асинхронный электропривод, содержащий индуктор, состоящий из магнитопровода с полюсами и трехфазный обмотки, якорь и коммутирующее устройство, отличающийся тем, что, с целью повышения точности позиционирования и фиксации якоря, трехфазная обмотка индуктора выполнена из отдельных катушек, охватывающих полюса магнитопровода индуктора, начала которых Соединены с клеммами для подключения нулевого провода источника питания, а концы каждой катушки соединены через замыкающий контакт коммутирующего устройства с общей точкой подключения размыкающих контактов трех фаз, соединенных с клеммами для подключения соответствующих фаз источника питания, причем управляющий блок коммутирующего устройства выполнен с возможностью одновременного подключения для фиксации якоря пяти фазных катушек, образующих ряд, у которого до середины один, а после середины - противоположный порядок следования фаз, причем для начала шага - с возможностью отключения последней катушки ряда, а для завершения шага - с возможностью одновременного отключения первой катушки ряда, подключения последней катушки ряда и
катушки, следующей за последней катушкой ряда, где край якоря расположен над первой катушкой ряда.
2. Электропривод по п. 1.отличающий с я тем, что полюса магнитопроводз индуктора снабжены направляющими роликами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2259001C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1993 |
|
RU2067350C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2377707C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2005 |
|
RU2279752C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1993 |
|
RU2068613C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2050675C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2301488C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2321940C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2357349C1 |
| ЛИНЕЙНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2389125C1 |
Использование: в промышленных роботах и манипуляторах. Сущность изобретения: электропривод включает линейный асинхронный двигатель и коммутирующее устройство, линейный асинхронный двигатель содержит индуктор и якорь. Трехфазная обмотка индуктора выполнена в виде отдельных катушек, охватывающих полюса сердечника индуктора. Пять последовательных катушек индуктора поочередно образует ряд, в котором до середины ряда один, а после середины ряда противоположный порядок следования фаз. Для шагового перемещения якоря отключают последнюю катушку ряда, а после завершения шага для фиксации якоря одновременно отключают первую катушку ряда, подключают последнюю катушку ряда и катушку, следующую за последней катушкой ряда. Первой катушкой ряда считается та, над которой расположен край якоря. Для перемещения якоря полюса индуктора снабжены направляющими роликами. Изобретение позволяет повысить точность позиционирования и фиксации якоря. 6 ил. С/,
ix
Г
ЛЛ
и
iTT Фт.1
5
Фиг. 2.
77777
и
J
T т.1
F,
Ј
t/f/7
/Hill
Г777Т
Фиг. 4
7777Т
Фиг. 6
| Электропривод возвратно-поступательного движения | 1987 |
|
SU1451815A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный электродвигатель | 1982 |
|
SU1051662A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
