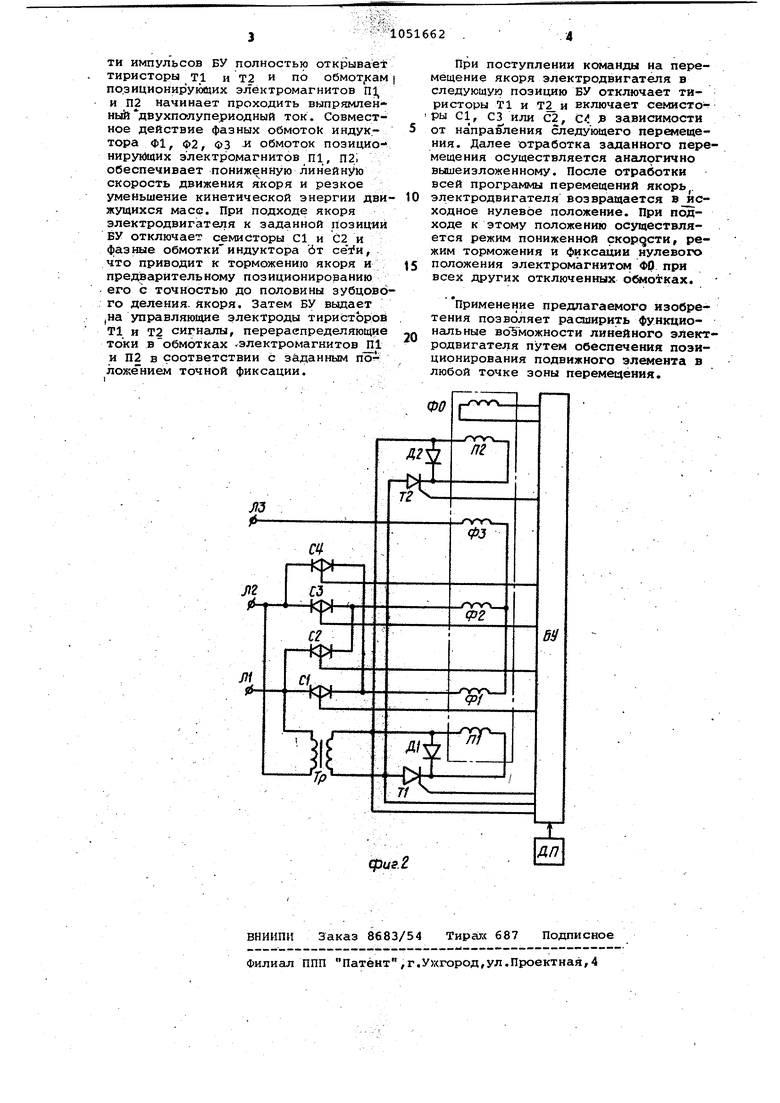
Изобретение относится к электротехнике, в частности к электрическим машинам с линейным переиещением под вижного элемента, и может быть использовано в линейных приводах метал лорежущих станков, промышленных ро ботов и в других механизмах, где требуется линейное перемещение с точным позиционированием. Известен линейный электродвигатель, содержащий индуктор с ферромаг нитным якорем. Этот электродвигатель имеет сплошной цилиндрический якорь и обеспечивает передвижение механизма из одного крайнего положения в другое 1 J Недостатком известного электродвигателя является невозможность обеспечения фиксированного останова рабочего органа производственного механизма в любой точке пути. Наиболее близкий к предлагаемому является линейный электродвигатель, содержащий индуктор с трехфазной обмоткой и ферромагнитным якорем, в пазах которого установлены короткозамкнутые токрпроводящие элементыГ21 Недостаток указанного двигателя заключается в невозможности останова и фиксации рабочего органа в произвольной точке,что ограничивает функциональные возможности привода. Цель изобретения - расширение функциональных возможностей линейного электродвигателя путем обеспечения точного позиционирования. Указанная цель достигается тем, что в линейном электродвигателе, содержащем индуктор с трехфазной Обмоткой и ферромагнитным якорем, в пазах которого установлены короткозамкнутые токопроводяцие элементы, с обоих тстрцов индуктора установлены электромагниты с обращенными к якорю ферромагнитными полюсами, расстоя ние между осями которых равно или кратно зубцовому делению якоря, причем расстояние между электромагнитами кратно полюсному делению якоря. На фиг. 1 показаны конструкция электромагнитов и их крепление к корпусу линейного электродвигателя . для случая цилиндрического якоря; .на фиг. 2 - схема управления электро двигателем. Устройство состоит из индуктора 1 и якоря 2, в поверхностном слое кото рого чередуются ферромагнитные зубцы 3 и токопроводящие элементы 4. С торцов индуктора установлены позиционирующие электромагниты содержащие Обмотки 5, полюса 6, набранные из пластин электротехнической стали и литые ярма 7. Расстояние между элект ромагнитами кратно зубцовому делению .якоря. Поэтому при. расположении под полюсами одного из электромагнитов , зубцов якоря под полюсами другого электромагнита будут пазы якоря. Электрическая схема управления линейным электродвигателем включает в себя фазные обмотки Ф 1,0 2 и Ф 3 электродвигателя, обмотки П1 и П2. позиционирующих электромагнитов, обмотку ео электромагнита фиксации начальногоположения якоря, коммутатор из семисторов. С1, С2, СЗ и С4 . лируемые.выпрямители з тиристоров . Т1, Т2 и диодов Д1, Д2/ блок управления (ВУ , трансформатор Тр для питания блока- управления и регулируемых выпрямителей и датчик положеНИН (ДП), вырабатывающий импульсы при перемещении якоря синхронно чередованию структуры поверхностного слоя якоря. Устройство работает следующим образом. При протекании постоянного тока по обмоткам позиционирующих электромагнитов образуются магнитные потоки, проходящие по полюсам 6 и ярмам 7 электромагнитов, зубцам 3 и телу якоря 2 и создающие при движущимся якоре тормозное усилие, а при неподвижнее якоре фиксирунвдее усилие. Фиксированное положение якоря определяется соотнсяяением токов в обмотках позициониру1-адих электромагнитов. В частности, фиксированное положение якоря, показанное на фиг.1, соответствует равенству токов в обмотках обоих позиционирующих электромагнитов. При включении только левого или только правого позиционирукидего электромагнита фиксированное положение якоря будет соответственно правее или левее показанного на фиг. 1 положения на величину, равную половине зубцовоГо деления якоря, При распределении токов в обмотках позиционирующих электромагнитов происходит изменение положения фиксации в пределах половины зубцового деления якоря. В исходном положении якорь электродвигателя находится в начальном нулевом положении, где он фиксируется маломсзщным фиксирующим электромагнитом ФО, например, за торец якоря. В память БУ заложена программа работы электропривода. При поступлеНИИ команды на отработку программы БУ отключает.обмотку электромагнита фр и отпирает семисторы С1 и СЗ в результате включаются фазные обмотки Ф1, Ф2, ФЗ. индуктора электодвигатейя и якорь электродвигатея перемещается в направлении заанной позиции. Одновременно от атчика импульсов в БУ поступают мпульсы, число которых сравниватся с числом, записанным в памяти, ри определенной разности полученых от датчика и записанных в памяти итотульсов БУ полностью открывает тиристоры Т1 и Т2 и по o6MoTjKaM позиционирующих электромагнитов П, и П2 начинает проходить выпрямленный двухполупериодный ток. Совместное действие фазных обмотоК индуктора Ф1, Ф2, ФЗ л обмоток позицио нирунйцих электромагнитов П1, n2.i обеспечивает пониженную линейную скорость движения якоря и резкое уменьшение кинетической энергии движущихся масс. При подходе якоря электродвигателя к заданной позиции БУ отключает семисторы С1 и С2 и фазные обмоткииндуктора 6т , что приводит к торможению якоря и предварительному позиционированию его с точностью до половины зубцовбго деления, якоря. Затем БУ вьщает ,на управляющие электроды тиристоров Т1 и Т2 сигналы, перераспределяющие токи в обмотках vэлeктpoмaгнитoв 1 и П2 в соответствии с заданным по точной фиксации.
При поступлении команды на перемещение якоря электродвигателя в следующую позицию БУ отключает тиристоры Т1 и включает семисто ры С1, СЗ или С2, С 3 зависимости от направления следующего перемещения. Далее отработка заданного перемещения осуществляется анашогично вышеизложенному. После отработки всей программы перемещений якорь,,
0 электродвигателя возвращается В исходное нулевое положение. При подходе к этому положению осуществляется режим пониженной cKopqcTH, режим торможения и фиксации нулевого положения электромагнитом ФО при
5 всех других отключенных обмотках.
применение предлагаемого изобретения позволяет расширить функциональные ВО1ГМОЖНОСТИ линейного элект0родвигателя путем обеспечения позиционирования подвижного элемента в любой точке зоны перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1990 |
|
SU1823095A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2547813C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| Электропривод | 1975 |
|
SU597051A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
| Линейный многофазный двигатель | 1978 |
|
SU1166232A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
ЛИНЕЙНЫЙ ЭЛВКТРОДВИГАТЕЛЬ, содержащий индуктор с трехфазной обмоткой и ферромагнитным якорем, в пазах которого установлены короткозамкнутые токопроводящие элементы, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения точного позиционирования, с обоих торцов индуктора установлены электромагниты с обращенными к якорю ферромагнитными полюсами, расстояние между осями которых равно или кратно зубцовому делению якоря, причем расстояние между э лектромагнитами кратно полюсному делению якоря. сл ffi о IsD
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Соколов М.И., Сорокин Л.К | |||
| Электропривод с линейными асинхронными двигателями | |||
| М., энергия, 1974, с | |||
| Пуговица | 0 |
|
SU83A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ивоботенко Б.А | |||
| и др | |||
| Электропривод: с ноилми линейными двигателями переменного тока.- В сб.,Автоматизированный электропривод | |||
| М., энергия 1980, с.250-256. | |||
