Фиг.1
Изобретение относится к приборостроению и может быть использовано для определения азимутов ориентйрных направлений.
Известны гирокомпасы, содержащие электронный блок, чувствительный элемент, подвешенный в следящем корпусе, снабженном фотоэлектрическим датчиком угла рассогласования следящей системы. Следящий корпус установлен в трегер, на котором с возможностью в0аиШйШ установлена угломерная часть со зрительной трубой и статорной частью датчика угла, роторная часть которого имеется на следящем корпусе. Такие гирокомпаса имеют погреш- ности, связанные с изменениями в промежуток времени между Зталонйр йЙШми поправки, зависящей от взаимного положения оптической оси зрительной трубы и статора датчика угла, ротора датчика угла и оптической оси фотоэлектрического датчика.
Известен гирокомпас, содержащий систему преобразования информации и управления, чувствительный элемент, подвешенный в следящем корпусе, снабженном фотоэлектрическим датчиком угла рассогласования и триппель-призмой. Следящий корпус имеет ротор датчика угла и установлен в наружном корпусе, на котором установлен статор датчика угла, оптические контрольные элементы и два взаимно ортогональных уровня. Наружный корпус крепится на внутреннем кольце устройства горизонтирования, причем может крепить- ся с дискретностью 90°. Уровни имеют юс- тировочные винты, установленные встречно и имеющие в головках отверстия под инструмент. Для определения азимутов ориентйрных направлений используется теодолит, измеряющий угол между ориен- тирным направлением и контрольным элементом.
Недостатком является то, что такой гирокомпас обладает погрешностями, обла- дающими в течение всей эксплуатации свойствами случайных, но в то же время имеющими свойства систематических в данных конкретных условиях- температуре, горизонтировании, ориентировании корпу- са. влиянии магнитного поля. Это погрешность от вредного момента вследствие остаточной намагниченности корпуса гирокомпаса и неперпендикулярности оси вращения следящего корпуса к опорной поверхности неподвижного корпуса, еслед- ствие влияние вредных моментов из-за ошибки горизонтирования, позицион ная погрешность лимба датчика угла. В этом случае обычный путь уточнения показаний
прибора, заключающийся в увеличении числа измерений и последующем усреднении их результатов не приносит требуемого эффекта. Кроме того, выставка нулевого положения уровней, согласование теодолита и контрольного элемента, повороты наружного корпуса требуют много времени и неудобны для оператора
Целью изобретения является повышение точности и эксплуатационных характеристик
Эта цель достигается тем, что в гирокомпасе, содержащем чувствительный элемент, взвешенный в следящем корпусе, датчик угла поворота чувствительного элемента, триппель-призму, устройство горизонтирования с внутренним кольцом, наружный корпус, в котором установлен следящий корпус, датчик угла поворота следящего корпуса, оптические контрольные элементы и два взаимно ортогональных уровня с ампулами и котировочными механизмами, выполненные каждый в виде винтовой пары, при этом наружный корпус установлен на внутреннем кольце устройства горизонтирования, контрольные элементы установлены под углом 180° друг к другу, а в состав гирокомпаса введены первый и второй поворотные фланцы, установленные с возможностью поворота относительно друг друга, причем первый поворотный фланец неподвижно закреплен на наружном корпусе гирокомпаса, а второй - установлен с возможностью разворота относительно внутреннего кольца устройства горизонтирования вновь введенным приводом, при этом в котировочный механизм дополнительно введен маховичок с расположенным внутри него упорным шарикоподшипником с двумя кольцами и сепаратором, причем одно из колец упорного шарикоподшипника выполнено плоским и жестко соединено с маховичком, имеющим возможность вращения относительно корпуса котировочного механизма вокруг оси вращения винтовой пары, сепаратор упорного шарикоподшипника жестко соединен с винтом винтовой пиры котировочного механизма, а гайка винтовой пары установлена с обеспечением контакта с ампулой уровня, на втором кольце упорного шарикоподшипника выполнен палец, входящий в дугообразный паз выполненный в маховичке, причем точки контакта двух боковых дорожек этого ко- ца с шариками расположены на конусной поверхности, вершина которой расположена в точке пересечения оси винта винтовой пары юстировочного механизма с пло костью, пересекающей центры шариков упорного шарикоподшипника, при этом второо коль
цо упорного шарикоподшипника выполнено с возможностью скольжения по корпусу котировочного механизма, а момент трения кольца о корпус больше момента качения шариков по кольцу.
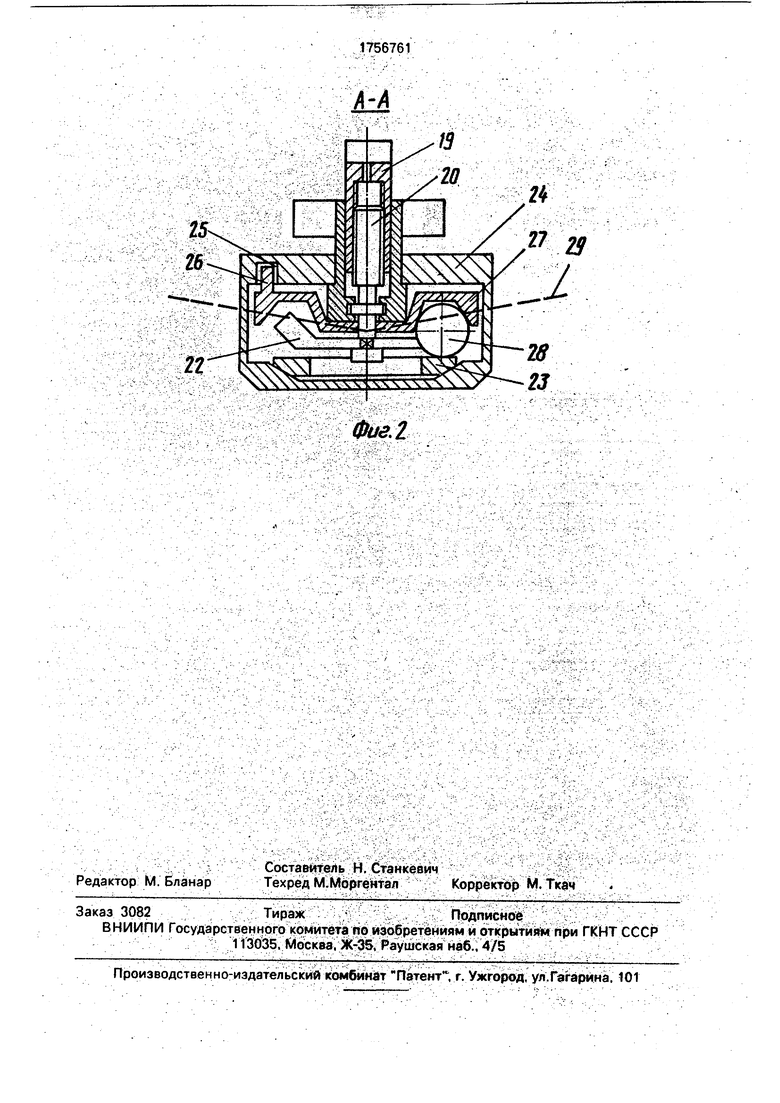
На фиг.1 изображен гирокомпас; на фиг.2 - сечение А-А на фиг.1.
Гирокомпас работает следующим образом.
Чувствительный элемент 1 подвешен в следящем корпусе 2, содержащем фотоэлектрический датчик угла 3 с триппель- призмой 4 и установленном в наружном корпусе 5, который имеет датчик угла 6 поворота следящего корпуса 2. Наружный кор- пус 5 также содержит оптические контрольные элементы 7 и два взаимно ортогональных уровня 8 с котировочными механизмами 9. Наружный корпус 5 закреплен на поворотном фланце 10, который с возможностью вращения установлен во втором фланце 11. кинематически связанном с приводом 12 и установленном с возможностью вращения в корпусе 13 внутреннего кольца устройства 14 горизонтирования, имеющего механизмы 15 горизонтирования. На корпусе 13 установлены фиксаторы 16. Чувствительный элемент 1, следящий корпус 2, фотоэлектрический датчик 3 угла и триппель-призма 4, датчик 6 угла электрически связаны с системой 17 преобразования информации и управления, а теодолит 18 находится в оптической связи с контрольным элементом 7.
Котировочный механизм 9 содержит гайку 19 и винт 20 Гайка 19 контактирует с ампулой 21 уровня, винт 20 контактирует с шайбой-сепаратором 2 упорного шарикового подшипника, одно из колец 23 которого контактирует с маховичком 24, имеющим дугообразный паз 25, в котором находится палец 26, имеющийся на втором кольце 27 подшипника. Точки контакта двух беговых дорожек этого кольца с шариками 28 принадлежат воображаемой конусной поверхности 29, вершина которой находится в точке пересечения оси винта 29 с плоскостью, содержащей центры шариков 28.
Гирокомпас работает следующим образом.
Устройство 14 горизонтирования и теодолит 18 устанавливается на местности. Фланец 10 предварительно горизонтирует- ся с помощью механизмов горизонтирования 15. Затем на фланец 10 устанавливается неподвижный корпус 5 со всем содержимым. После этого фиксаторами 16 освобождают фланцы 10 и 11 и неподвижный корпус 5 вначале вручную грубо разворачивается на фланце 10 одним из контрольных элементов в направлении на теодолит 18, а затем приводом 12 точно доворачивают фланец 11 вместе с фланцем 10 и корпусом 5 до установ ления оптической связи теодолита 18с кочтрольным элементом 7. После этого фланцы 10 и 11 блокируются фиксаторами 16.
При проведении этих работ может произойти как нарушение горизонтирования фланца 10, так и попадание в зазор между
0 корпусом 5 и фланцем посторонних частиц, например, песка, возможны ошибки оператора, погрешности при сборке корпусов 5 и 2, и поэтому ось вращения следящего корпуса 2 -не будет занимать строго вертикаль5 ного положения. С помощью котировочных механизмов 9 ампулы 21 уровней 8 устанавливают в нуль-пункт. При этом оператор вращает маховички 24, вместе с маховичками вращается кольцо 23 и, влекомое паль0 цем 26, который упирается в край паза 25, кольцо 27. Так как кольца 23 и 27 вращаются с одинаковой угловой скоростью, то шарики
28заторможены и вместе с ними с той же угловой скоростью поворачивается шайба5 сепаратор 22 и винт 20. Под воздействием винта 20 перемещается гайка 19, перемещая ампулу 21. Так как перемещение пузырька ампулы из-за поверхностного натяжения жидкости присуще запаздыва0 ние, то после установки в нуль-пункт и прекращении вращения маховичка 24, пузырек ампулы перейдет через нуль, произойдет перерегулирование на некоторой небольшой угол, Чтобы возвратить его на место,
5 маховичок 24 начинают поворачивать в обратную сторону.
При этом палец 26 свободно перемещается относительно паза 25 и кольцо 27 оказывается заторможенным. Влекомые
0 кольцом 23 шарики 28 перекатываются по беговым дорожкам кольца . Угловая скорость перемещения шариков 28 вокруг оси винта 20 более чем в 2 раза меньше, чем угловая скорость маховичка 24. Конкретное
5 передаточное число обусловлено расстоянием от центра шарика 28 до точки пересечения воображаемой конусной поверхности
29с вертикальной осью шарика. Шарики 28 будут перемещать шайбу 22, винт 20, и та0 ким образом, обратный поворот маховичка 24 будет в несколько раз медленнее перемещать гайку, 19 и вместе с ней ампулу 21. Так как угол перерегулирования небольшой и возврат пузырька осуществляется с гораздо
5 меньшей скоростью, уровни 8 окончательно устанавливаются в нуль-пункт.
После этого датчик 3 угла с помощью следящего корпуса 2 оптически согласовывается с контрольным элементом 7 и отсчет датчика угла 6 поступает в систему 17. Затем
следящий корпус 2 грубо ориентирует чувствительный элемент 1 в направлении на север, датчик угла 3 через триппель-призму 4 оптически согласовывается с чувствительным элементом 1 и угол поворота датчика угла б и результаты обработки информации (обработкой части траектории ЧЭ, по точкам реверсии, компенсационный метод измерения и т.д.) о движении чувствительного элемента 1 под влиянием его взаимодействия с угловой скоростью вращения Земли преобразуются блоком 17 в угол азимута контрольного элемента 7 At.
После этого фиксаторами 16 освобождаются фланцы 10 и 11, корпус 5 вместе с фланцем 10. Вручную грубо разворачивается на 180°, а затем приводом 12 производится более точный доворот фланца 11 до оптического согласования теодолита 18 с вторым контрольным элементом 7 и произ- водится блокировка разворота фиксаторами 16. Так как ось гирокомпаса невертикальна, уровни 8 собьются с нуль- пункта. Восстановление нулевого положения уровней 8 производится на этот раз с помощью механизмов горизонтирования 15. При этом ось гидроблока снова займет не вертикальное положение, но строго симметричное первому. Это приводит к изменению знака вредных моментов, связанных с горизонтированием, а их величина сохранится с той же степенью точности, в какой воспроизводится нулевое положение уровней 8. После этого опять датчик угла 3 оптически согласовывается с контрольным элементом 7 и т.д. до получения отсчета Аа. При нахождении среднего арифметического Ai+Aa/2 Акэ получаем точное значение азимута контрольного элемента. Для получения азимута ориентирного направления суммируется угол, снятый по теодолиту 18 между направлением на контрольный элемент 7 и на ориентир AT и Акэ : А Акэ + Ат. При этом в значении Акэ исключаются ошибки из-за вредных моментов вследст- вне ошибки горизонтирования, из-за вредных моментов вследствие остаточной намагниченности корпуса ГК и неперпендикулярности оси поворота следящего корпуса 2 к опорной поверхности корпуса 5, в два раза уменьшается позиционная погрешность лимба датчика угла 6.
Формула изобретения Гирокомпас, содержащий чувствительный элемент, взвешенный в следящем кор-
пусе, датчик угла поворота чувствительного элемента, триппель-призму, устройство горизонтирования с внутренним кольцом, наружный корпус, в котором установлен следящий корпус, датчик угла поворота следящего корпуса, оптические контрольные элементы и два взаимно ортогональных уровня с ампулами и котировочными механизмами, выполненные каждый в виде винтовой пары, при этом наружный корпус установлен на внутреннем кольце устройства гбриз онтированйя, отличающийся тем, что, с целью повышения точности и эксплуатационных характеристик, контрольные элементы установлены под углом 180° друг к другу, а в состав гирокомпаса введены первый и второй поворотные фланцы, установленные с возможностью поворота относительно друг друга, и фиксаторы обоих фланцев, причем первый поворотный фланец неподвижно закреплен на наружном корпусе гирокомпаса, а второй установлен с возможностью разворота относительно внутреннего кольца устройства горизонтирования вновь введенным приводом, при этом в юстировочный механизм дополнительно введен маховичок с расположенным внутри него упорным шарикоподшипником с двумя кольцами и сепаратором, причем одно из колец упорного шарикоподшипника выполнено плоским и жестко соединено с маховичком, имеющим возможность вращения относительно корпуса юстировочного механизма вокруг оси вращения винтовой пары, сепаратор упорного шарикоподшипника жестко сое- с винтом винтовой пары юстировочного механизма, а гайка винтовой пары установлена с обеспечением контакта с ампулой уровня, на втором кольце упорного шарикоподшипника выполнен палец, входящий в дугообразный паз, выполненный в маховичке, причем точки контакта двух беговых дорожек этого кольца с шариками расположены на конусной поверхности, вершина которой расположена в точке пересечения оси винта винтовой пары юстировочного механизма с плоскостью, пересекающей центры шариков упорного шарикоподшипника, при этом.второе кольцо упорного шарикоподшипника выполнено с возможностью скольжения по корпусу юстировочного механизма, а момент трения кольца о корпус больше момента качения шариков по кольцу.г
13
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| Устройство для юстировки световолокна в наконечнике | 1989 |
|
SU1748126A1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ И ПРЕДВАРИТЕЛЬНОЙ ОЦЕНКИ ПАРАМЕТРОВ ИЗМЕРИТЕЛЬНОГО ПРИБОРА | 2012 |
|
RU2513037C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС (ВАРИАНТЫ) | 2002 |
|
RU2215263C1 |
| ОПОРНОЕ УСТРОЙСТВО | 1996 |
|
RU2112262C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ И ЮСТИРОВКИ ПРИБОРА | 2005 |
|
RU2292572C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ | 2015 |
|
RU2610389C1 |
| УСТРОЙСТВО МОНТАЖНО-ЮСТИРОВОЧНОЕ КРУПНОГАБАРИТНЫХ ОПТИКО-МЕХАНИЧЕСКИХ СБОРОК | 2022 |
|
RU2784477C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
Изобретение относится к области приборостроения и может быть использовано для определения истинного азимута ориен- тирных направлений. Целью изобретения является повышение точности гирокомпаса и его эксплуатационных характеристик. Расположение контрольных элементов 7 под углом 180° друг к другу, введение дополнительных поворотных фланцев 10 и 11 между наружным корпусом 5 гирокомпаса и внутренним кольцом 13 устройства горизон- тирования 14, а также использованиям юс- тировочного механизма 9 с переменным передаточным отношением позволяет за короткое время производить развороты наружного корпуса 5 гирокомпаса на 180° и вставку нуль-пунктов уровней 8 с высокой точностью с целью исключения влияния ошибок горизонтирования. 2 ил.
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
