Изобретение относится к области измерительной техники и может быть использовано в системах навигации, топопривязки и ориентирования наземных подвижных объектов.
Системы навигации (СН) предназначены для автоматического непрерывного определения и выдачи в бортовую ЭВМ координат местоположения объекта, текущего дирекционного угла его продольной оси, курсового угла, дальности до пункта назначения.
Известны инерциальные навигационные системы (ИНС), в которых в качестве первичных источников информации используются инерциальные чувствительные элементы: акселерометры определяют абсолютное ускорение объекта; датчики угловой скорости (ДУС) определяют абсолютную угловую скорость.
Навигационные параметры в ИНС получают путем двухкратного интегрирования ускорений, а угловое положение объекта - интегрированием информации ДУС. Навигационные системы для наземных подвижных объектов предназначены для формирования параметров ориентации и навигации объекта. Как правило, циклограмма работы навигационной системы включает следующие этапы: начальная выставка (гирокомпасирование), навигация (работа). Варианты исполнения этих этапов могут быть различными. В частности, может быть несколько вариантов выполнения начальной выставки в зависимости от условий выполнения выставки и наличия внешней информации о координатах и углах ориентации объекта.
Известен способ определения азимутального направления (гирокомпасирования) на базе динамически настраиваемого гироскопа (ДНГ) (патент РФ №2300078), работающего в режиме двухосного датчика угловой скорости (ДУС), измеряющего горизонтальную составляющую вектора угловой скорости вращения Земли, с вертикальной ориентацией оси кинетического момента с автокомпенсацией уходов гироскопа поворотами 0-180°.
Принцип автокомпенсации уходов гироскопа поворотами 0-180° описан в монографии С.М. Зельдович, М.И. Малтинский, И.М. Окон, Я.Г. Остромухов «Автокомпенсация инструментальных погрешностей гиросистем». - Л.: Судостроение, 1976 г.
Для исключения постоянных составляющих дрейфов ДНГ проводятся измерения в двух различных азимутальных ориентациях. Это - две противоположные азимутальные ориентации, например
α1=0°, α1=180°
Прибор имеет привод разворота корпуса ДНГ вокруг оси Н, устройства питания и управления приводом и устройства для фиксации положений 0 и 180°. Программа управления процедурой поворотов, установки, измерений вводится в контроллер. Информация о токах датчиков момента ДНГ в положениях 0°, 180° также вводится в контроллер. По этой информации контроллер вычисляет азимут прибора.
Приведенные в описании рассматриваемого патента зависимости и процедуры для исключения постоянных составляющих дрейфов ДНГ получили широкое распространение в силу простоты их реализации чисто аппаратными средствами, например, в контроллерах.
Наличие привода разворота и его конструктивное исполнение существенно определяют общие габариты прибора. А точность изготовления поворотного устройства влияет на общую ошибку гирокомпасирования. В статье Ю. Голяев, А. Исаев, Ю. Колбас, С. Лантратов, В. Минзар, Г. Телегин «Гирокомпас на основе лазерного гироскопа», ЭЛЕКТРОНИКА: Наука, Технология, Бизнес 8/2006, приведены составляющие суммарной величины ошибки гирокомпасирования и проведена оценка погрешности измерения азимута, связанной с отличием угла между положениями "+" и "-" от 180°, которая определяется точностью изготовления поворотного устройства. Численное значение указанной ошибки составляет до 30". Для прецизионных измерений роль угловой ошибки фиксации возрастает, и для ее уменьшения применяют алгоритмическую коррекцию случайной составляющей рассогласования углов фиксации и оси гирокомпаса, а также несколько увеличивают размер поворотной платформы, что существенно усложняет и увеличивает габариты прибора.
Известен гирокомпас по патенту №2526477 RU, принятый за прототип, содержащий корпус, поворотный стол, блок чувствительных элементов (БЧЭ), имеющий в своем составе датчик угловой скорости и датчики горизонта (акселерометры), систему разворота БЧЭ вокруг вертикальной оси, включающую задатчик разворота и привод, блок сервисной электроники и вычислительное устройство, при этом корпус выполнен с возможностью вращения на своей оси, которая установлена на упорном подшипнике и зафиксирована в вертикально расположенном полом валу червячного редуктора, входной вал которого связан с приводным шаговым двигателем, корпус связан с внешней рамкой, установленной с возможностью качания в подшипниках, зафиксированных в корпусе, внешняя рамка в свою очередь связана с внутренней рамкой, установленной с возможностью качания в перпендикулярном направлении в подшипниках, зафиксированных во внешней рамке, на внутренней рамке, по оси качания, размещена первая вертикальная стойка с закрепленным на ней одноосным измерителем угловой скорости, представляющим собой волоконно-оптический гироскоп (ВОГ) с замкнутым контуром обратной связи, на корпусе выполнена вторая вертикальная стойка с установленным на ней линейным шаговым двигателем, ходовой винт которого через тягу связан с внешней рамкой, на внешней рамке выполнена третья вертикальная стойка с установленным на ней линейным шаговым двигателем, ходовой винт которого через тягу связан с внутренней рамкой, первый акселерометр установлен в нижней части первой стойки, жестко связанной с внутренней рамкой, а на кронштейне, расположенном снизу внешней рамки, перпендикулярно первому акселерометру расположен второй акселерометр.
Недостатками рассматриваемого устройства являются:
- большие габариты прибора за счет применения редукторного привода, состоящего из червячного редуктора и приводного шагового мотора;
- снижение точности получаемых оценочных показателей, обусловленное наличием ошибки гирокомпасирования при использовании режима автокомпенсации уходов гироскопа поворотами 0-180°, определяемой точностью изготовления поворотной платформы.
Технической задачей настоящего заявляемого изобретения является снижение габаритов прибора, применяемого в наземных подвижных объектах, и повышение точности гирокомпасирования при использовании автокомпенсации уходов гироскопа поворотами 0-180° за счет уменьшения ошибки, связанной с отличием угла между положениями "+" и "-" от 180°.
Поставленная техническая задача решается тем, что в гироскопическом измерителе, включающем основание, платформу, установленную на основании с возможностью поворота вокруг оси, перпендикулярной основанию, и фиксации в заданном положении, закрепленный на платформе блок чувствительных элементов (БЧЭ), имеющий в своем составе датчики угловой скорости и датчики горизонта (акселерометры), ось чувствительности которого перпендикулярна оси вращения платформы, блок обработки информации, блок управления платформой, согласно заявляемому изобретению ось вращения платформы устанавливается в основании через сдвоенные радиально-упорные шарикоподшипники, приводной электродвигатель выполнен в габаритах с внутренним диаметром статора не менее внешнего диаметра наружных обойм сдвоенных радиально-упорных шарикоподшипников и с длиной магнитопровода, не превышающей высоты сдвоенных радиально-упорных шарикоподшипников, при этом статор закреплен на основании, а ротор на платформе, для фиксации платформы в конструкцию введен электромагнитный тормоз, выполненный в габаритах по внутреннему диаметру не менее наружного диаметра приводного электродвигателя и по высоте, не превышающей высоты сдвоенных радиально-упорных шарикоподшипников, при этом сдвоенные шарикоподшипники, приводной электродвигатель и электромагнитный тормоз размещены концентрично и в одной плоскости, на платформе установлен один фиксированный упор, а на основании установлены два упора, при этом один упор фиксированный, а другой упор выполнен с двумя эксцентричными поверхностями и с возможностью вращения относительно собственной оси, все упоры установлены на одном диаметре относительно оси вращения платформы и упоры в основании установлены со сдвигом на 180°.
Существенными отличительными признаками являются:
- выполнение шарикоподшипниковой опоры с применением сдвоенных радиально-упорных шарикоподшипников;
- применение безредукторного привода для вращения платформы и электромагнитного тормоза для ее фиксации;
- выполнение приводного электродвигателя в габаритах с внутренним диаметром не менее наружного диаметра сдвоенных радиально-упорных шарикоподшипников, и с длиной магнитопровода, не превышающей высоты сдвоенных радиально-упорных шарикоподшипников, и выполнение электромагнитного тормоза в габаритах по внутреннему диаметру не менее наружного диаметра приводного электродвигателя и по высоте, не превышающей высоты сдвоенных радиально-упорных шарикоподшипников;
- выполнение концентричного размещения сдвоенных радиально-упорных шарикоподшипников, приводного электродвигателя, электромагнитного тормоза и размещение их в одной плоскости;
- выполнение одного из упоров с двумя эксцентричными поверхностями и с возможностью вращения относительно собственной оси.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы известны в технике, но их введение в указанной связи в заявляемый гироскопический измеритель позволяет:
- за счет использования сдвоенных радиально-упорных шарикоподшипников обеспечить необходимую жесткость конструкции и устойчивость платформы со всеми установленными на ней элементами в условиях применения на подвижных наземных объектах;
- за счет использования безредукторного привода и выполнения габаритов электродвигателя и электромагнитного тормоза в указанной взаимосвязи с габаритами шарикоподшипниковой опоры и за счет концентричного расположения их относительно оси вращения платформы и размещения их в одной плоскости обеспечить высокую степень компактности измерителя;
- за счет использования одного упора с двумя эксцентричными поверхностями и с возможностью вращения его относительно собственной оси обеспечить возможность компенсации допусков изготовления поворотной платформы и обеспечить выставку угла поворота платформы на 180° с высокой точностью, что позволит снизить ошибку гирокомпасирования, связанную с отличием угла между положениями "+" и "-"от 180°.
Изобретение поясняется чертежами, где
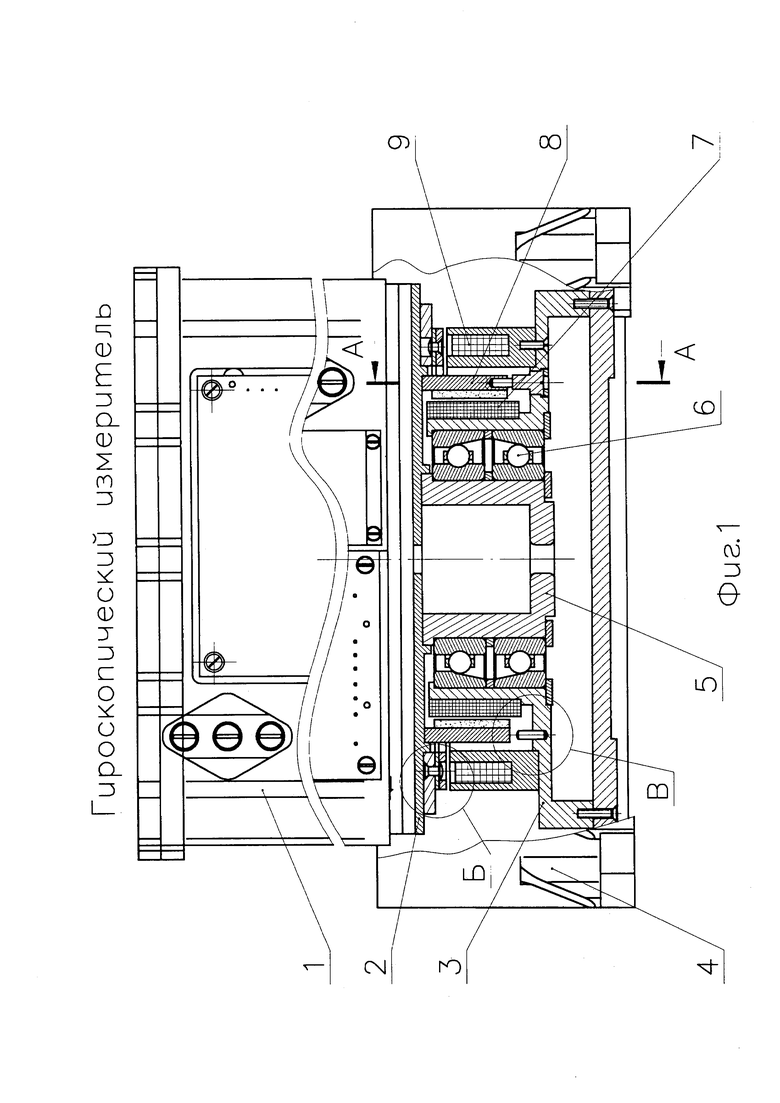
На Фиг. 1 представлен Гироскопический измеритель.
На Фиг. 2 представлены элементы конструкции электромагнитного тормоза.
На Фиг. 3 представлен упор с эксцентричными поверхностями и с возможностью вращения его относительно собственной оси.
Гироскопический измеритель (Фиг. 1) включает блок чувствительных элементов (БЧЭ) 1, имеющий в своем составе датчики угловой скорости и датчики горизонта (акселерометры) (на чертежах датчики не показаны), ось чувствительности которого перпендикулярна оси вращения платформы, и закрепленный на платформе 2, установленной на основании 3 с возможностью поворота вокруг оси, перпендикулярной основанию, и фиксации в заданном положении, блок обработки информации, блок управления платформой (на чертежах блоки не показаны). Основание 3 закреплено в корпусе 4 измерителя.
Ось 5 платформы 2 установлена в основании 3 через сдвоенные радиально-упорные шарикоподшипники 6. Такая опора с использованием сдвоенных радиально-упорных шарикоподшипников обеспечивает возможность вращения платформы 2 относительно основания 3 с БЧЭ 1 с обеспечением достаточной жесткости конструкции, требуемой для подвижных объектов наземной техники.
Приводной электродвигатель состоит из статора 7 и ротора 8.
Статор приводного электродвигателя 7 закреплен на основании 3, а ротор 8 на платформе 2, электромагнитный тормоз 9 обеспечивает фиксацию платформы 2 относительно основания 3. В качестве электромагнитного тормоза использован тормоз, приводимый в действие рабочим напряжением по типу КЕВ COMBINORM B (Германия).
Электромагнитный тормоз (Фиг. 2) 9 состоит из следующих узлов - непосредственно электромагнит 10, закрепленный на основании 3, и якорь 11, закрепленный на платформе 2, который через пружину 12 связан с тормозным диском 13, являющимся рабочей частью электромагнитного тормоза 9.
За счет предлагаемого размещения приводного электродвигателя и электромагнитного тормоза относительно шарикоподшипников узла крепления обеспечивается высокая степень компактности измерителя.
Подвижный упор 14 (Фиг. 3) на роторе электродвигателя 8, жестко связанного с платформой 2 в контакте с упором 15, закрепленным на основании 3 и имеющим эксцентричные поверхности с величиной эксцентриситета δ и возможностью вращения относительно собственной оси, определяет точность фиксированного положения платформы 2 с БЧЭ в положении «180°». Вращением упора 15 относительно собственной оси, при постоянном контактировании его с подвижным упором 14, производится компенсация допусков изготовления поворотной платформы, что обеспечивает высокую точность выставки угла поворота платформы 2 в положении «180°» и уменьшение угловой ошибки фиксации. Экспериментально была показана возможность снижения погрешности от угловой ошибки фиксации до 10'', без существенного усложнения прибора и увеличения его габаритов. Накладкой 16 обеспечивается фиксация выставленного положения упора 15 на основании 3. Фиксированный упор 17 на основании 3 определяет фиксированное положение платформы 2 с БЧЭ 1 в положении «0°».
Гироскопический измеритель работает следующим образом.
Гироскопический измеритель включается либо по команде с пульта автономного управления (ПАУ), либо от внешнего ПК. В исходном положении «0°» платформа 2 зафиксирована электромагнитным тормозом 9, при этом подвижный упор 14 находится в контакте с фиксированным упором 17 на основании 3, определяющим для платформы 2 положение «0°».
Подается питание на обмотку электромагнитного тормоза 9, и под действием пружины 12 тормозной диск 13 отходит от электромагнита 10, образуя зазор «Δ», тем самым, обеспечивая свободное вращение платформы 2 относительно основания 3, после чего по сигналу управления электродвигатель производит разворот платформы 2 с БЧЭ 1 до момента контактирования упоров 14 и 15, после чего электродвигатель отключается и снимается напряжение с обмотки электромагнитного тормоза 9, при этом тормозной диск 13 притягивается к электромагниту 10, выбирая зазор «Δ», тем самым, обеспечивая фиксацию платформы 2 относительно основания 3 в положении «180°».
Проводят измерение проекций угловой скорости вращения Земли и углов наклона и определяют предварительный азимут.
Затем подается питание на обмотку электромагнитного тормоза 9, который срабатывает и расстопаривает платформу 2 относительно основания 3, после чего по сигналу управления электродвигатель производит разворот платформы 2 с блоком 1 до момента контактирования подвижного упора 14 с фиксированным упором 17 на основании 3, после чего электродвигатель отключается и снимается напряжение с обмотки электромагнитного тормоза 9, который при этом обеспечивает фиксацию платформы 2 относительно основания 3 в положении «0°».
После чего повторно проводят измерение проекций угловой скорости вращения Земли и углов наклона, определяют азимут, и результат выдается на дисплей ПАУ или во внешний ПК.
Использование заявляемого изобретения позволило обеспечить жесткие требования по устойчивости, предъявляемые к конструкциям приборов для наземных подвижных объектов, и одновременно высокую степень компактности измерителя, а также снизить ошибку гирокомпасирования, связанную с отличием угла между положениями "+" и "-" от 180° при использовании автокомпенсации уходов гироскопа поворотами 0-180°.
В заявляемой конструкции гироскопического измерителя азимутального направления могут быть использованы все виды гироскопов: механические гироскопы, волоконно-оптические гироскопы, лазерные гироскопы и иные гироскопы.
Заявляемое техническое решение было использовано в ОАО «СКБ ПА» при разработке системы топопривязки навигации и ориентирования (СТНО) для наземных подвижных объектов в рамках ОКР «Барнаул», «Спрут».
Результаты изготовления и испытаний образцов подтвердили эффективность решений, что позволило обеспечить требования ТЗ по массе, габаритам и по точности.
Литература
1. Монография С.М. Зельдович, М.И. Малтинский, И.М. Окон, Я.Г. Остромухов. «Автокомпенсация инструментальных погрешностей гиросистем». - Л.: Судостроение, 1976 г.
2. Ю. Голяев, А. Исаев, Ю. Колбас, С. Лантратов, В. Минзар, Г. Телегин. «Гирокомпас на основе лазерного гироскопа», ЭЛЕКТРОНИКА: Наука, Технология, Бизнес 8/2006.
3. Патент №2300078 РФ.
4. Патент №2526477 РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И КОМБИНИРОВАННОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2001 |
|
RU2189564C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2550592C1 |
| ГИРОКОМПАС | 2013 |
|
RU2526477C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2571199C1 |
| СПОСОБ АНАЛИТИЧЕСКОГО ГИРОКОМПАСИРОВАНИЯ С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2110767C1 |
| ГИРОГОРИЗОНТКОМПАС | 2016 |
|
RU2617136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА НАКЛОННОГО ОБЪЕКТА С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2188392C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2194948C1 |

Изобретение относится к области измерительной техники и может быть использовано в системах навигации, топопривязки и ориентирования наземных подвижных объектов. Технический результат – повышение точности. Для этого введены: шарикоподшипниковая опора с применением сдвоенных радиально-упорных шарикоподшипников; безредукторный привод для вращения платформы и электромагнитный тормоз для ее фиксации; жесткие упоры на основании и поворотной платформе. Причем приводной электродвигатель, статор которого закреплен на основании, а ротор на платформе, выполнен в габаритах с внутренним диаметром не менее наружного диаметра сдвоенных радиально-упорных шарикоподшипников, и с длиной магнитопровода, не превышающей высоты сдвоенных радиально-упорных шарикоподшипников, и электромагнитный тормоз выполнен в габаритах по внутреннему диаметру не менее наружного диаметра приводного электродвигателя и по высоте, не превышающей высоты сдвоенных радиально-упорных шарикоподшипников; сдвоенные радиально-упорные шарикоподшипники, приводной электродвигатель, электромагнитный тормоз размещены концентрично и в одной плоскости: один из упоров выполнен с двумя эксцентричными поверхностями и с возможностью вращения относительно собственной оси. 3 ил.
Гироскопический измеритель, содержащий основание, платформу, установленную на основании с возможностью поворота вокруг оси, перпендикулярной основанию, и фиксации в заданном положении, закрепленный на платформе блок чувствительных элементов, имеющий в своем составе датчики угловой скорости и датчики горизонта (акселерометры), ось чувствительности которого перпендикулярна оси вращения платформы, блок обработки информации, блок управления платформой, отличающийся тем, что ось вращения платформы установлена в основании через сдвоенные радиально-упорные шарикоподшипники, приводной электродвигатель выполнен в габаритах с внутренним диаметром статора не менее внешнего диаметра наружных обойм сдвоенных радиально-упорных шарикоподшипников и с длиной магнитопровода, не превышающей высоты сдвоенных радиально-упорных шарикоподшипников, при этом статор закреплен на основании, а ротор на платформе, для фиксации платформы в конструкцию введен электромагнитный тормоз, выполненный в габаритах по внутреннему диаметру не менее наружного диаметра приводного электродвигателя и по высоте, не превышающей высоты сдвоенных радиально-упорных шарикоподшипников, при этом сдвоенные шарикоподшипники, приводной электродвигатель и электромагнитный тормоз размещены концентрично и в одной плоскости, на платформе установлен один фиксированный упор, а на основании установлены два упора, при этом один упор фиксированный, а другой упор выполнен с двумя эксцентричными поверхностями и с возможностью вращения относительно собственной оси, все упоры установлены на одном диаметре относительно оси вращения платформы и упоры в основании установлены со сдвигом 180°.
| ГИРОКОМПАС | 2013 |
|
RU2526477C1 |
| RU 142334 U1, 27.06.2014 | |||
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| Способ поверки многокомандных приборов активного контроля | 1990 |
|
SU1793190A1 |
| US 5247748 A1, 28.09.1993 | |||
| US 4587860 A1, 13.05.1986. | |||

