Изобретение относится к области приборостроения и может быть использовано при определении азимутов.
Известно гироскопическое устройство прицеливания, описанное в патенте US 4087919, опубл. 1978. В устройстве в качестве предварительного измерителя азимута использован магнитный компас, а в качестве корректирующего элемента - чувствительный элемент в виде поплавкового интегрирующего гироскопа для измерения азимутальной ошибки предварительного прицеливания различных объектов по магнитному компасу и коррекции ошибки прицеливания. Для выставки оси чувствительности гироскопа в горизонт используются спиртовые уровни. При этом предусмотрена система разворота гироскопа на 180° вокруг выходной оси гироскопа для исключения дрейфа гироскопа от постоянного смещения и разбалансировки. Недостатком устройства является недостаточная точность.
Известен гирокомпас, описанный в патенте US 2902772, опубл. 1959, принятый за прототип, в котором использован чувствительный элемент - поплавковый интегрирующий гироскоп и карданов подвес чувствительного элемента. Гироскоп установлен на платформе, которая лежит в плоскости внутренней рамы подвеса и имеет посредством механической связи возможность поворота относительно внутренней рамы подвеса, который служит для установки оси чувствительности гироскопа в плоскости меридиана, а азимут определяют по сигналам датчика угла (индикатора), установленного на указанной механической связи, с помощью которого определяют угловое положение платформы относительно внутренней рамы подвеса, определяя тем самым азимут. Недостатком компаса является сложность конструкции и низкая точность измерений.
Задачей заявленного изобретения является повышение точности измерений.
Сущность заявленного изобретения заключается в том, что в качестве чувствительных элементов гирокомпаса выбраны датчик угловой скорости (ДУС) для измерения азимутальной ошибки измерения в результате неточной выставки оси вращения ротора (вектора кинетического момента ротора) ДУСа на север и два наклономера для контроля положения оси чувствительности ДУСа относительно горизонтальной плоскости. Указанные чувствительные элементы расположены в термостате, который установлен в двухосном кардановом подвесе. Датчик угла установлен на внутренней оси подвеса с возможностью измерения углового положения термостата относительно рамы подвеса. ДУС установлен в термостате таким образом, что указанный датчик угла позволяет определять угол между наружной осью подвеса и осью вращения ротора гиромотора ДУСа (главной осью ДУСа) и может измерять углы между измерительными положениями ДУСа в азимуте. Для повышения точности измерений устройство позволяет производить измерения в нескольких положениях и производить компенсацию уходов гироскопа.
Заявленный гирокомпас состоит из блока чувствительных элементов, установленного на поворотном столе, блока электронных приборов, персонального компьютера и пульта управления, при этом блок чувствительных элементов, компьютер и пульт управления связаны с блоком электронных приборов посредством соединительных электрических кабелей.
На фиг.1 представлен блок чувствительных элементов на поворотном столе.
Блок чувствительных элементов включает в себя следующие элементы - три чувствительных элемента: датчик угловой скорости (1) и два наклономера H1 (2) и Н2 (3), установленные в термостате (12), двухосный карданов подвес (10) термостата с чувствительными элементами, датчик угла (4), приводы П1 (5) и П2 (6) соответственно внутренней и наружной осей подвеса, контактные механизмы КМ1 (7) и КМ2 (8) соответственно внутренней и наружной осей подвеса, отражательный элемент (9), иллюминатор (13) и жесткий несущий корпус (11), внутри которого расположены указанные элементы.
Каждый из приводов внутренней и наружной осей карданова подвеса имеет одинаковую конструкцию в виде зубчато-червячного самотормозящегося безлюфтового редуктора с шаговым двигателем.
Заявленное устройство для определения азимута содержит инерциальные чувствительные элементы, установленные в кардановом подвесе с датчиком угла на его внутренней оси, с возможностью проведения измерений сигналов чувствительных элементов и датчика угла в определенном количестве измерительных положений относительно плоскости меридиана и горизонтальной плоскости. Особенность заявленного устройства заключается в том, что ДУС и два наклономера H1 и Н2 помещены в термостат, жестко связаны друг с другом и с ротором датчика угла внутренней оси карданова подвеса, образованного рамой, внутренней и наружной осями, посредством которого закреплены в жестком корпусе установленного на поворотном столе блока чувствительных элементов гирокомпаса. При этом оси чувствительности (измерительные оси) наклономеров перпендикулярны выходной оси ДУСа, так что ось чувствительности H1 направлена параллельно главной оси ДУСа, а ось чувствительности Н2 параллельна оси чувствительности (измерительной оси) ДУСа.
ДУС представляет собой двухстепенный гироскоп с поплавковым подвесом. По оси прецессии гироскопа (выходной оси ДУСа) расположены датчик угла прецессии и датчик момента, которые с усилителем обратной связи ДУСа образуют обратную связь (электрическую пружину). Усилитель обратной связи ДУСа (УДУС) преобразует переменное напряжение датчика угла прецессии ДУСа в постоянный ток датчика момента, пропорциональный проекции абсолютной угловой скорости на ось чувствительности ДУСа. Измерительный выход УДУСа является измерительным выходом ДУСа. ДУС содержит также элементы системы обогрева - термодатчик и обмотку обогрева ДУСа.
Карданов подвес (КП) термостата с чувствительными элементами образован рамой, цапфами рамы и цапфами термостата, которые образуют соответственно наружную (ось Н) и внутреннюю (ось В), взаимно перпендикулярные оси КП, направления этих осей определены соответствующими векторами Н и В. В опорных подшипниковых узлах жесткого несущего корпуса установлены цапфы рамы КП (установлена наружная ось КП), при этом указанные опорные узлы жестко связывают направление Н наружной оси КП с несущим корпусом.
На указанном КП установлены термостат с ДУСом и наклономерами так, что выходная ось ДУСа и внутренняя ось КП расположены параллельно, контактный механизм КМ1, определяющий положение совпадения направлений кинетического момента h ротора гиромотора ДУСа и наружной оси КП Н, привод внутренней оси П1 с возможностью обеспечения поворота термостата с ДУСом и наклономерами вокруг внутренней оси и удержания термостата с ДУСом и наклономерами относительно рамы КП, датчик угла (ДУ) с возможностью измерения углов поворота ДУСа относительно рамы (углов Ф между векторами направлений Н и h); контактный механизм КМ2 с возможностью определения вертикальных положений внутренней оси КП (при расположении наружной оси КП в плоскости горизонта); привод наружной оси П2 с возможностью обеспечения поворота рамы КП вокруг наружной оси КП и удержания рамы относительно несущего корпуса и отражательный элемент, закрепленный на торце наружной оси КП (на свободном торце цапфы рамы КП).
Направления В и Н задаются следующим образом (фиг.1): для В (в частности)- П1→датчик угла; для Н-П2→отражательный элемент.
Наклономеры H1 и Н2 (акселерометры с малым диапазоном измерений, позволяющие с высокой точностью определять малые отклонения своих осей чувствительности от горизонтальной плоскости) предназначены для контроля вертикальности внутренней оси подвеса и жестко связаны с корпусом ДУСа таким образом, что оси чувствительности наклономеров приблизительно перпендикулярны внутренней оси КП и выходной оси ДУСа. Ось чувствительности H1 (14) направлена параллельно главной оси ДУСа (15), а ось чувствительности Н2 (16) параллельна оси чувствительности ДУСа (17).
Оси чувствительности наклономеров специально отклонены от перпендикуляров на углы около 5' (установлены приблизительно перпендикулярно внутренней оси), чтобы избежать полного отсутствия сигналов наклономеров при вертикальном положении внутренней оси КП, к которому необходимо стремиться при измерении азимута.
Отражательный элемент (ОЭ) предназначен для обеспечения возможности передачи измеренного прибором азимута на другие объекты, азимут которых требуется определить. ОЭ представляет собой набор призм с взаимно перпендикулярными гранями. ОЭ закрепляется на свободном торце наружной оси так, чтобы ребра призм были перпендикулярны внутренней оси КП.
Поворотный стол (18) состоит из нижнего опорного кольца, трех подъемных винтов, основания с зажимами крепления корпуса. Основание имеет неподвижную и поворотную части и привод поворотной части. В отверстия нижнего кольца вставлены винты крепления стола к поверхности, на которую устанавливается стол. С помощью трех подъемных винтов, соединяющих нижнее кольцо и неподвижную часть основания, горизонтируется верхняя поверхность поворотной части основания, на которую устанавливается блок чувствительных элементов и, таким образом, горизонтируется наружная ось КП.
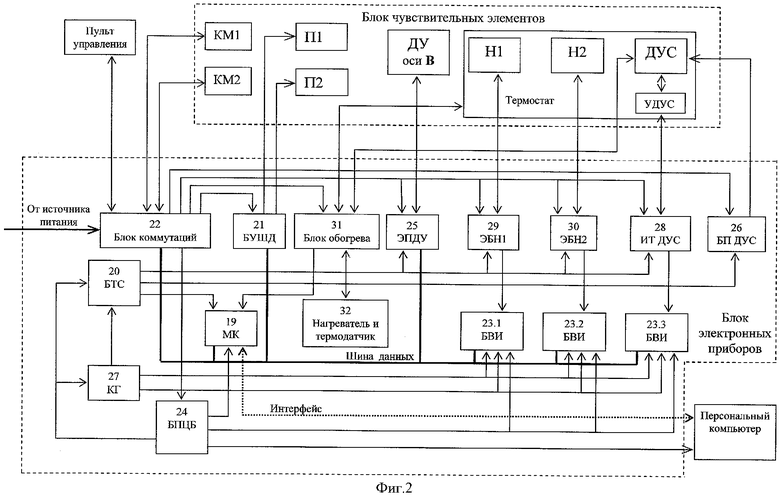
На фиг.2 представлены блок электронных приборов и его связи с блоком чувствительных элементов, компьютер и пульт управления.
Блок электронных приборов включает микроконтроллер (19), блок тактовой сетки (20), блок управления шаговыми двигателями (21), блок коммутаций (22), три блока временных интервалов (23.1, 23.2, 23.3), блок питания цифровых блоков (24), электронный прибор датчика угла (25), блок питания ДУСа (26), блок кварцевого генератора (27), измеритель тока ДУСа (28), ЭБН1 (29) - электронный блок наклономера H1 и ЭБН2 (30) - электронный блок наклономера Н2, блок обогрева (31) и нагреватель с термодатчиком (32).
Микроконтроллер (МК) управляет обменом информацией между персональным компьютером и блоками временных интервалов, блоком управления шаговыми двигателями, блоком коммутаций и электронным прибором датчика угла. По командам от компьютера МК управляет разгоном гиромотора по специальной циклограмме, опрашивает и накапливает информацию с блоков 28-30 (через соответствующие блоки временных интервалов) и блока 25 и передает ее в компьютер; управляет разворотом осей КП на заданные числа шагов шаговых двигателей с заданными скоростями, управляет разворотом осей КП в исходное положение по сигналам с контактных механизмов соответствующих осей КП, опрашивает телеметрическую информацию о напряжениях питания и тепловом состоянии гирокомпаса, опрашивает состояние контактных механизмов (замкнут-разомкнут).
МК связан с компьютером посредством стандартного интерфейса через соответствующие разъемы. С блоками временных интервалов, блоком управления шаговыми двигателями, блоком коммутаций и электронным прибором датчика угла микроконтроллер связан через многоразрядную шину данных.
Блок управления шаговыми двигателями (БУШД), управляемый МК, формирует импульсы, поступающие на обмотки шаговых двигателей приводов П1 и П2 при поворотах ДУСа относительно рамы и рамы относительно корпуса.
Блок питания (БП) ДУСа предназначен для питания гиромотора ДУСа, обмотки возбуждения датчика угла прецессии ДУСа, импульсных опор подвеса ДУСа и усилителя УДУС (на фиг.2 для простоты выходы объединены в одну линию).
Электронный прибор датчика угла (ЭПДУ) обеспечивает питание обмотки возбуждения ДУ внутренней оси КП, преобразование выходных напряжений ДУ и их фаз во временные интервалы и измерение этих интервалов в условных единицах. Отсчет угла Ф в измерительном положении в единицах угла пропорционален измеренному временному интервалу Т:Ф=k0·T. Коэффициент k0 определяется длительностями цикла измерения и условной единицы времени (интервал между метками относительного времени) и учтен в программе компьютера. Сигнал с прибора в виде цифрового отсчета положения ротора ДУ оси В относительно статора по шине данных поступает в МК.
Измеритель тока ДУСа (ИТ) и электронные блоки наклономеров ЭБН1 и ЭБН2 предназначены для измерения и преобразования соответствующих токов ДУСа, H1 и Н2, при этом с выходов ИТ, ЭБН1 и ЭБН2 снимаются последовательности импульсов, частоты следования которых являются соответствующими функциями токов с выходов ДУСа f1(IДУС), наклономера H1 f2(IH1) и наклономера Н2 f3(IH2). Кроме того, ЭБН1 и ЭБН2 осуществляют подачу питания соответственно на H1 и Н2.
Блоки временных интервалов (БВИ) предназначены для измерения количества импульсов с выходов ИТ, ЭБН1 и ЭБН2 за цикл измерения и времени их прихода внутри цикла измерения (относительного времени). Каждый блок временных интервалов получает три последовательности импульсов: метки относительного времени и метки начала циклов измерения - от блока кварцевого генератора, и импульсы от одного из источников сигнала, частоту следования которых требуется измерить. Каждый БВИ постоянно измеряет количество импульсов ni, поступивших от источника сигнала в промежуток времени tц между двумя соседними метками начала i-го цикла измерения (время цикла измерения), а также количество импульсов-меток относительного времени t, поступивших за время от метки начала цикла до прихода последнего сигнального импульса в данном цикле, и сохраняет их на время следующего цикла. Микроконтроллер накапливает суммы (количества) N=Σni сигнальных импульсов за время измерения, заданное персональным компьютером, и хранит относительное время t1 прихода сигнального импульса в цикле, предшествовавшем началу измерения, фиксирует количество циклов измерения k, относительное время t2 прихода последнего импульса в последнем цикле измерения и передает эти данные по стандартному интерфейсу в компьютер. Компьютер вычисляет частоту следования импульсов F по формуле: F=N/(k·tц+t2-t1).
Каждый БВИ имеет первый реверсивный измерительный вход, связанный с соответствующим выходом одного из блоков ИТ, ЭБН1 и ЭБН2, второй и третий входы для приема соответственно меток начала цикла и меток относительного времени, вход для подачи питания и разъем для подключения шины данных.
Блок тактовой сетки (БТС) предназначен для генерирования и трансляции опорных импульсов (в том числе меток начала цикла и меток относительного времени (относительно цикла)), предназначенных для МК, ИТ, ЭБН1 и ЭБН2, блока питания ДУСа и ЭПДУ.
Блок кварцевого генератора (КГ) предназначен для генерирования меток относительного времени и меток начала циклов измерения для блока тактовой сетки и трех БВИ.
Блок питания цифровых блоков (БПЦБ) предназначен для подачи питания на МК, кварцевый генератор и блок тактовой сетки, три БВИ и компьютер.
Блок обогрева измеряет с помощью термодатчиков отклонения температур от заданных номинальных значений в местах их установки и обеспечивает посредством обмоток обогрева и нагревателя заданный тепловой режим работы гирокомпаса, а также выдает информацию о тепловой готовности ДУСа на компьютер через МК. Блок обогрева имеет первые шесть выходов для подачи питания соответственно на термодатчики и обмотки нагрева ДУСа и термостата, на термодатчик и нагреватель блока электронных приборов, седьмой выход для передачи сигнала о тепловой готовности гирокомпаса на индикаторный (тепловой) вход МК, три измерительные входа для подачи сигналов с соответствующих выходов термодатчиков и вход для подачи питания.
Блок коммутаций обеспечивает подачу питания по командам компьютера на приборы, размещенные в блоке электронных приборов, а также контроль положений (вертикальные положения оси В и сонаправленность h и Н) ДУСа посредством контактных механизмов КМ1 и КМ2 (щетки разомкнуты/замкнуты).
Термостат в блоке чувствительных элементов представляет собой корпус из теплоизолятора, на внутренней поверхности которого расположены термодатчик и обмотка обогрева термостата. Нагреватель в блоке электронных приборов представляет собой плоскую панель, выделяющую дополнительное тепло при низких температурах для поддержания внутри блока рабочей температуры, при этом температура в блоке электронных приборов контролируется соответствующим термодатчиком блока электронных приборов.
Таким образом, заявленное устройство для определения азимута (гирокомпас) содержит гироскопический чувствительный элемент и датчик угла, установленные в кардановом подвесе с возможностью измерения азимута. Отличительная особенность заявленного устройства заключается в следующем: указанные датчик угла, чувствительный элемент, выполненный в виде датчика угловой скорости, карданов подвес, образованный рамой, внутренней и наружной осями, входят в состав установленного на поворотном столе блока чувствительных элементов гирокомпаса, который содержит при этом также два наклономера H1 и Н2, жестко связанные с корпусом ДУСа таким образом, что оси чувствительности наклономеров перпендикулярны выходной оси ДУСа (ось чувствительности H1 направлена параллельно главной оси ДУСа, а ось чувствительности Н2 параллельна оси чувствительности ДУСа), термостат, в котором расположены указанные ДУС и наклономеры, первый и второй контактный механизмы, приводы П1 и П2 соответственно внутренней и наружной осей КП, отражательный элемент и жесткий несущий корпус, в опорных узлах которого установлена наружная ось КП. При этом в КП установлены термостат с ДУСом и наклономерами так, что выходная ось ДУСа и внутренняя ось КП расположены параллельно, контактный механизм КМ1 с возможностью определения положения совпадения направлений кинетического момента ротора ДУСа и наружной оси КП; привод П1 с возможностью обеспечения поворота и удержания термостата с ДУСом и наклономерами относительно рамы КП; датчик угла с возможностью измерения углов поворота ДУСа относительно рамы; контактный механизм КМ2 с возможностью определения вертикальных положений внутренней оси КП при выставке наружной оси КП в плоскости горизонта; привод П2 с возможностью обеспечения поворота рамы КП вокруг наружной оси КП и удержания рамы относительно несущего корпуса и отражательный элемент, закрепленный на свободном торце наружной оси КП. Гирокомпас дополнительно содержит блок электронных приборов, компьютер и пульт управления. Блок электронных приборов гирокомпаса представляет собой корпус, в котором установлены приборы: микроконтроллер, блок тактовой сетки, блок управления шаговыми двигателями, блок коммутаций, три блока временных интервалов, блок питания цифровых блоков, электронный прибор датчика угла, блок питания ДУСа, блок кварцевого генератора, измеритель тока ДУСа, электронные блоки ЭБН1 и ЭБН2 соответствующих наклономеров H1 и Н2, блок обогрева и нагреватель с термодатчиком. При этом ИТ, ЭПДУ, ЭБН1 и ЭБН2 измерительными входами связаны с соответствующими измерительными выходами ДУСа, датчика угла, H1 и Н2. ЭПДУ, ЭБН1 и ЭБН2 выходами для подачи питания обеспечивают подачу питания соответственно на датчик угла, H1 и Н2. Блок тактовой сетки опорным входом связан с первым выходом блока кварцевого генератора, первым выходом связан с опорными входами ИТ, ЭБН1, ЭБН2 и ЭПДУ, а вторым и третьим выходами связан соответственно с опорными входами МК и блока питания ДУСа. Три БВИ первыми реверсивными измерительными входами связаны с соответствующими измерительными выходами блоков ИТ, ЭБН1 и ЭБН2, вторыми и третьими входами связаны соответственно с вторым и третьим выходами блока кварцевого генератора. Блок питания цифровых блоков первым выходом связан с входами для подачи питания блока тактовой сетки и блока кварцевого генератора, вторым выходом связан с входами для подачи питания трех БВИ, а третьим и четвертым выходами связан соответственно с входами для подачи питания МК и компьютера. Блок обогрева первыми шестью выходами связан с соответствующими входами термодатчиков и обмоток обогрева ДУСа и термостата, термодатчика и нагревателя блока электронных приборов, седьмым выходом связан с индикаторным входом МК, а тремя измерительными входами связан соответственно с выходами указанных термодатчиков. Блок коммутаций имеет вход для подачи питания от внешнего источника, соединен с пультом управления, через два разъема соединен соответственно с КМ1 и КМ2, первыми четырьмя выходами связан соответственно с входами для подачи питания блока управления шаговыми двигателями, блока обогрева, блока питания ДУСа, блока питания цифровых блоков, а пятым выходом связан с входами для подачи питания ЭПДУ, ЭБН1, ЭБН2 и ИТ. Четыре выхода блока питания ДУСа обеспечивают подачу питания соответственно на гиромотор, обмотку возбуждения датчика угла прецессии, усилителя обратной связи и импульсных опор подвеса гиромотора. Три БВИ, ЭПДУ, блок управления шаговыми двигателями, который двумя выходами связан соответственно с входами П1 и П2, и блок коммутаций связаны с МК посредством шины данных, а компьютер связан с МК посредством интерфейса.
Устройство работает следующим образом.
После установки блока чувствительных элементов на поворотный стол на блок электронных приборов подают питание от внешнего источника.
По командам с пульта блок 22 сначала обеспечивает подачу внешнего питания на блок 31, который подает питание на термодатчики и обмотки обогрева ДУСа и термостата блока чувствительных элементов, нагреватель и термодатчик блока электронных приборов, а затем блок 22 обеспечивает подачу питания на блоки 24, 25, 28-30. В свою очередь, блок 24 осуществляет подачу питания на блоки 27, 20, 19, 23.1, 23.2, 23.3 и компьютер. Блок 27 вырабатывает синхронизирующие (опорные) импульсы и подает их на блок 20, который при этом вырабатывает опорные частоты для блоков 28-30, 25, 26 и импульсы синхронизации (метки начала циклов работы) для МК и компьютера. Начинает работать МК в режиме ожидания команд от компьютера по интерфейсу и приема цифровой информации от блоков 25, 28-30.
Затем производится горизонтирование стола, при котором наружная ось КП устанавливается в плоскость горизонта. С помощью подъемных винтов верхняя поверхность поворотной части основания стола устанавливается в горизонтальное положение по сигналам наклономера H1, информация с которого выведена на экран компьютера. Поворотная часть стола вместе с закрепленным на ней блоком чувствительных элементов разворачивается в требуемое схемой измерений азимутальное положение, например положение, в котором теодолит в автоколлимационном режиме, установленный напротив оптического отражательного элемента, получает отраженное от него изображение своего перекрестия.
При достижении тепловой готовности гирокомпаса по команде компьютера блок 22 подает питание на блок 26, который, в свою очередь, подает питание на гиромотор ДУСа, датчик угла прецессии ДУСа, импульсные опоры подвеса ДУСа и УДУС. В результате подачи увеличенного напряжения при пониженной частоте гиромотор начинает ускоренный разгон. После разгона гиромотора на него подается номинальное напряжение.
Затем подают команду компьютеру провести грубое измерение азимута отражательного элемента (азимута направления Н).
Компьютер последовательно подает на МК команды на проведение операций выставки в вертикальное положение оси В карданова подвеса по сигналам наклономера Н2 и установки ДУСа с помощью КМ1 и датчика угла оси В в измерительное положение (ИП1), при котором вектор кинетического момента h ротора гиромотора ДУСа установлен в направлении оси Н, а ось В вертикальна и направлена вверх. МК подает на блок 22 команду включения питания блока 21, формирует и подает последовательности импульсов на блок 21, необходимые для установки подвеса в ИП1. По сигналам с блока 21 приводы П1 и П2 устанавливают карданов подвес в указанное положение. При этом установка внутренней оси вертикально вверх контролируется контактным механизмом КМ2 и наклономерами, а установка вектора h в направлении Н контролируется контактным механизмом КМ1 и датчиком угла оси В.
Далее производятся измерения сигналов ДУСа и датчика угла оси В. С блока 28 через блок 23.3 и МК информация о сигнале ДУСа F1 поступает в компьютер и запоминается. С блока 25 информация о сигнале ДУ через МК также поступает в компьютер и запоминается. Затем компьютер подает команды на разворот ДУСа из ИП1 на 90° вокруг оси В в другое положение и производит измерение сигнала ДУСа F2, снимает отсчет ДУ оси В. По результатам измерений сигналов в двух положениях компьютер рассчитывает приблизительное значение азимута вектора кинетического момента ДУСа в ИП1 по формуле: Ah=arctgF1/F2. Квадрант, в котором находится Аh, определяется по знакам F1 и F2. Таким образом, происходит привязка отсчетов датчика угла оси В к азимуту вектора кинетического момента, которая позволяет произвести измерение азимута с высокой точностью не только вектора кинетического момента ДУСа, но и направлений наружной оси Н карданова подвеса и нормали оптического отражательного элемента.
Для этого компьютеру подают команду произвести точное измерение азимута. Оно состоит из разворотов ДУСа в четыре измерительных положения, измерений сигналов ДУСа и наклономеров и снятия отсчетов датчика угла оси В в этих четырех положениях. По команде компьютера МК подает на блок 22 команду включения питания блока 21, формирует и подает последовательности импульсов на блок 21, необходимые для установки чувствительных элементов в измерительные положения. Развороты в указанные положения осуществляются П1 и П2 по сигналам с блока 21.
В первом и третьем измерительных положениях вектор h направлен приблизительно на север N, во втором и четвертом измерительных положениях - приблизительно на юг S. Для установки ДУСа в первое положение из исходного ИП1 необходимо развернуть его на угол, равный азимуту АH, определенному при грубом измерении (или на угол АH - 360, если Аh больше 180°). В первом и втором положениях (эти измерения принимают за первый полуприем) ось В направлена вертикально вверх, в третьем и четвертом положении (эти измерения принимают за второй полуприем) ДУС перевернут, ось В направлена вертикально вниз. Перемещение ДУСа из второго в третье положение достигается путем разворота ДУСа в ИП1, последующего разворота вокруг оси Н на 180° и разворота вектора h вокруг внутренней оси КП на север по показаниям ДУ. В каждом из четырех положений измеряются и обрабатываются сигналы ДУСа, наклономеров и снимаются отсчеты Ф датчика угла по соответствующим цепям: ДУС - ИТ - блок 23.3 - МК - компьютер, H1 (H2) - ЭБН1 (ЭБН2) - блок 23.1 (23.2) - МК - компьютер, ДУ - ЭПДУ-МК - компьютер.
По результатам измерений в первом и втором положениях определяется азимут вектора h (гироскопический азимут) в первом положении (в первом полуприеме) следующим образом.
Результаты измерений посредством ДУСа (измеренные частоты импульсов) в первом и втором измерительных положениях определяются соответственно выражениями:
Fn=fм·sinAh1+fн+fм·k1·sinνn+fм·k2·sinψn+fn oc;
Fs=fм·sin(Ah1+180+Δϕ)+fн+fм·k1·sinνs+fм·k2·sinψs+fs oc,
где Ah1 - гироскопический азимут в первом положении, fм - сигнал ДУСа, соответствующий горизонтальной составляющей скорости вращения Земли (получен при направлении оси чувствительности ДУСа по линии запад-восток), fн - постоянная составляющая сигнала, k1 и k2 - коэффициенты поправки на невертикальность внутренней оси, fос - сигнал, пропорциональный относительной угловой скорости движения ДУСа относительно Земли; Δϕ=(Фs1-Фn1)-180° - величина, характеризующая неточность поворота h вокруг внутренней оси на 180° (Фn1(s1) - результаты измерений посредством ДУ в первом (втором) положениях первого полуприема), υ и ψ - углы отклонения осей чувствительности наклономеров H1 и Н2 от горизонтальной плоскости. Индексы n и s относятся соответственно к первому и второму положениям.
При вычитании выражения для сигнала ДУСа во втором положении из выражения для первого положения получим:
Fn-Fs=fм·(Ah1+Ah1+Δϕ)+fм·k1·(νn-νs)+fм·k2·(ψn-ψs)+fn oc-fs oc.
Откуда азимут вектора h в первом положении:
Ah1=(Fn-Fs-fм·Δϕ-fм·k1·(νn-νs)-fм·k2·(ψn-ψs)-fn oc+fs oc)/(2·fм)=(Fn-Fs)/(2·fм)-Δϕ/2-k1·(νn-νs)/2-k2·(ψn-ψs)/2-(fn oc-fs oc)/(2·fм).
Выразим гироскопический азимут в первом положении (в первом полуприеме) через результаты измерений ДУСом, датчиком угла и наклономерами:
Ah1=kд·(Fдn1-Fдs1)+kн1·(Fн1n1-Fн1s1)+kн2·(Fн2n1-Fн2s1)+0,5·(Фn1-Фs1+180°)+kω·(ωn1-ωs1),
где kд - масштабный коэффициент ДУСа, kн1 - коэффициент поправки на невертикальность внутренней оси по наклономеру H1, kH2 - коэффициент поправки на невертикальность внутренней оси по наклономеру Н2; Fдn1(s1), Fн1n1(s1), Fн2n1(s1) - результаты измерений посредством ДУСа, H1 и Н2 в первом (с индексом n1) и втором (с индексом s1) измерительных положениях (первого полуприема); Фn1(s1) - результаты измерений посредством ДУ в первом (втором) положениях (первого полуприема); kω - коэффициент поправки на относительную скорость; (ωn1(s1) - относительная угловая скорость движения ДУСа (относительно Земли), вычисляется как средняя скорость изменения сигнала H1 в первом (с индексом n1) и втором (с индексом s1) измерительных положениях (первого полуприема). Все указанные выше коэффициенты определяются при калибровке прибора, которая проводится до начала измерений азимута на специальной базе, имеющей эталонный хранитель азимута. Эти коэффициенты зависят от широты места измерения, поэтому перед началом измерений широта вводится в компьютер для их пересчета.
По результатам измерений в третьем и четвертом положениях (во втором полуприеме) аналогично определяется азимут вектора h (гироскопический азимут) в третьем положении (во втором полуприеме) по формуле:
Ah2=-kд·(Fдn2-Fдs2)-kн1·(Fн1n2-Fн1s2)-kн2·(Fн2n2-Fн2s2)-0,5·(Фn2-Фs2-180°)+kω·(ωn2-ωs2),
где индексы n2 и s2 относятся соответственно к третьему и четвертому измерительным положениям второго полуприема.
Далее компьютер рассчитывает азимут АH наружной оси карданова подвеса: рассчитываются азимуты наружной оси подвеса при направлениях оси В вверх и вниз в виде соответствующих сумм отсчета Ф датчика угла и гироскопического азимута в первом и третьем положениях, а искомый азимут АН наружной оси вычисляется как среднее арифметическое полученных азимутов по формуле: АН=0,5·[Ah1+Ah2+(Фn2-Фn1)], если Фn2-Фn1>0, или АН=0,5·[Ah1+Ah2+(Фn2-Фn1+720°)], если Фn2-Фn1<0. Положительными отсчетами Ф датчика угла считаются отсчеты по часовой стрелке от ИП1, при направлении оси В в сторону наблюдателя, величины гироскопического азимута положительны по определению.
Затем рассчитывается азимут нормали отражательного элемента АОЭ по формуле: АОЭ=АН+ϕ, где ϕ - угол между направлениями наружной оси и нормали отражательного элемента, этот угол определяется с помощью теодолита заранее или в процессе измерения азимута как полуразность отсчетов по горизонтальному лимбу теодолита, направленного на отражательный элемент во время измерений сигналов при двух вертикальных положениях внутренней оси КП.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| СКВАЖИННЫЙ ЗОНД ИЗМЕРИТЕЛЬНОГО КОМПЛЕКСА | 1992 |
|
RU2053358C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
Изобретение относится к области приборостроения и может быть использовано при определении азимутов. Устройство для определения азимута (гирокомпас) содержит инерциальные чувствительные элементы, установленные в кардановом подвесе с датчиком угла на его внутренней оси, с возможностью проведения измерений сигналов чувствительных элементов и датчика угла в определенном количестве измерительных положений относительно плоскости меридиана и горизонтальной плоскости. Датчик угловой скорости (ДУС) и два наклономера (H1) и (Н2) помещены в термостат, жестко связаны друг с другом и с ротором датчика угла (ДУ) внутренней оси карданова подвеса (КП), образованного рамой, внутренней и наружной осями, посредством которого закреплены в жестком корпусе установленного на поворотном столе блока чувствительных элементов гирокомпаса. Оси чувствительности (измерительные оси) наклономеров перпендикулярны выходной оси ДУСа, так что ось чувствительности H1 направлена параллельно главной оси ДУСа, а ось чувствительности Н2 параллельна оси чувствительности (измерительной оси) ДУСа. Кроме того, гирокомпас содержит пульт управления, блок электронных приборов и компьютер. Техническим результатом является повышение точности измерений. 2 ил.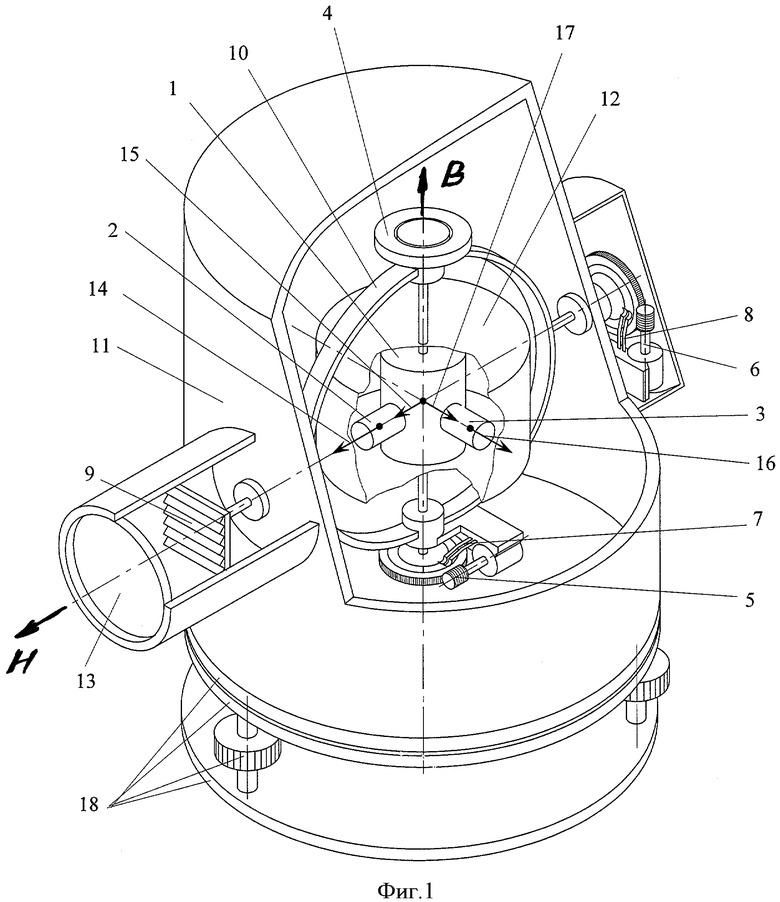
Гирокомпас, содержащий гироскопический чувствительный элемент и датчик угла, установленные на кардановом подвесе с возможностью измерения азимута, отличающийся тем, что указанные датчик угла (ДУ), чувствительный элемент, который выполнен в виде датчика угловой скорости (ДУС), и карданов подвес (КП), образованный рамой, внутренней и наружной осями, входят в состав установленного на поворотном столе блока чувствительных элементов гирокомпаса, который содержит при этом также два наклономера (H1) и (Н2), которые жестко связаны с корпусом ДУСа таким образом, что оси чувствительности наклономеров перпендикулярны выходной оси ДУСа, так что ось чувствительности H1 направлена параллельно главной оси ДУСа, а ось чувствительности Н2 параллельна оси чувствительности ДУСа, термостат, в котором расположены указанные ДУС и наклономеры, первый (КМ1) и второй (КМ2) контактные механизмы, первый (П1) и второй (П2) приводы соответственно внутренней и наружной осей КП, отражательный элемент и жесткий несущий корпус, в опорных узлах которого установлена наружная ось КП, при этом в КП установлены термостат с ДУСом и наклономерами так, что выходная ось ДУСа и внутренняя ось КП расположены параллельно и жестко связаны друг с другом, контактный механизм КМ1 с возможностью определения положения совпадения направлений кинетического момента ротора ДУСа и наружной оси КП; привод П1 с возможностью обеспечения поворота и удержания термостата с ДУСом и наклономерами относительно рамы КП; датчик угла с возможностью измерения углов поворота ДУСа относительно рамы; контактный механизм КМ2 с возможностью определения вертикальных положений внутренней оси КП при выставке наружной оси КП в плоскости горизонта; привод П2 с возможностью обеспечения поворота рамы КП вокруг наружной оси КП и удержания рамы относительно несущего корпуса, и отражательный элемент, закрепленный на свободном торце наружной оси КП; гирокомпас дополнительно содержит блок электронных приборов, компьютер и пульт управления; блок электронных приборов гирокомпаса представляет собой корпус, в котором установлены приборы: микроконтроллер (МК), блок тактовой сетки, блок управления шаговыми двигателями, блок коммутаций, три блока временных интервалов (БВИ), блок питания цифровых блоков, электронный прибор датчика угла (ЭПДУ), блок питания ДУСа, блок кварцевого генератора, измеритель тока ДУСа (ИТ), электронные блоки (ЭБН1 и ЭБН2) соответствующих наклономеров H1 и Н2, блок обогрева и нагреватель с термодатчиком, при этом ИТ, ЭПДУ, ЭБН1 и ЭБН2 измерительными входами связаны с соответствующими измерительными выходами ДУСа, датчика угла, H1 и Н2; ЭПДУ, ЭБН1 и ЭБН2 выходами для подачи питания обеспечивают подачу питания соответственно на датчик угла, H1 и Н2; блок тактовой сетки опорным входом связан с первым выходом блока кварцевого генератора, первым выходом связан с опорными входами ИТ, ЭБН1, ЭБН2 и ЭПДУ, а вторым и третьим выходами связан соответственно с опорными входами МК и блока питания ДУСа; три БВИ первыми реверсивными измерительными входами связаны с соответствующими измерительными выходами блоков ИТ, ЭБН1 и ЭБН2, вторыми и третьими входами связаны соответственно с вторым и третьим выходами блока кварцевого генератора; блок питания цифровых блоков первым выходом связан с входами для подачи питания блока тактовой сетки и блока кварцевого генератора, вторым выходом связан с входами для подачи питания трех БВИ, а третьим и четвертым выходами связан соответственно с входами для подачи питания МК и компьютера; блок обогрева первыми шестью выходами связан с соответствующими входами термодатчиков и обмоток обогрева ДУСа и термостата, термодатчика и нагревателя блока электронных приборов, седьмым выходом связан с индикаторным входом МК, а тремя измерительными входами связан соответственно с выходами указанных термодатчиков; блок коммутаций имеет вход для подачи питания от внешнего источника, соединен с пультом управления, через два разъема соединен соответственно с КМ1 и КМ2, первыми четырьмя выходами связан соответственно с входами для подачи питания блока управления шаговыми двигателями, блока обогрева, блока питания ДУСа, блока питания цифровых блоков, а пятым выходом связан с входами для подачи питания ЭПДУ, ЭБН1, ЭБН2 и ИТ; четыре выхода блока питания ДУСа обеспечивают подачу питания соответственно на гиромотор, обмотку возбуждения датчика угла прецессии, усилителя обратной связи и импульсных опор подвеса гиромотора; три БВИ, ЭПДУ, блок управления шаговыми двигателями, который двумя выходами связан соответственно с входами П1 и П2, и блок коммутаций связаны с МК посредством шины данных, а компьютер связан с МК посредством интерфейса.
| US 2902772 А, 08.09.1958 | |||
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| RU 2073206 C1, 10.02.1997 | |||
| Гирокомпас | 1991 |
|
RU2000542C1 |
| ОДНОГИРОСКОПНЫЙ КОРРЕКТИРУЕМЫЙ ГИРОКОМПАС (ВАРИАНТЫ) | 2000 |
|
RU2169349C1 |
| Устройство регулирования уровня квантования | 1979 |
|
SU885947A1 |
| JP 7071962 A, 17.03.1995. | |||

