Изобретение относится к трикотажному машиностроению, в частности к кругловя- зальным машинам,
Известны механизмы накатки полотна кругловязальных машин, типа МС, МСП и др., содержащие накатной валик, товарный валик, направляющие и цепную передачу.
Недостатком известных конструкций механизмов накатки полотна является непостоянство усилия накатки, отрицательно сказывающееся на качестве вырабатываемого трикотажного полотна. При накатке полотна в рулон на кругловязальных машинах типа МС (МСП-10) усилие накатки создается за счет сил трения, возникающих в зоне прижатия рулона полотна к накатному валику механизма. При этом усилие накатки изменяется с увеличением веса рулона и достигает максимального значения при его максимальном диаметре. При такой конструкции механизма накатки усилие накатки полотна, в силу изменения веса рулона, может в несколько раз превышать усилие, предусмотренное технологическими требованиями. Нестабильность усилия накатки передается механизму оттяжки полотна и, в
конечном итоге отрицательно сказывается на его качестве.
Наиболее близким к предлагаемому является механизм накатки полотна кругловя- зальной машины, содержащий товарный валик, накатной валик, направляющие и цепную передачу. Усилие накатки полотна создается силами трения, обусловленными весом рулона полотна, опирающегося сверху на накатной валик.
Недостатком данной конструкции механизма накатки полотна является то, что в процессе накатки рулона полотна его вес увеличивается. При этом увеличивается и нормальное давление в зоне взаимодействия рулона полотна с накатным валиком, а следовательно, увеличивается и сила трения, создающая усилие накатки полотна. Неравномерность усилия накатки полотна передается механизму оттяжки, что приводит к нарушению стабильности петельной структуры трикотажного полотна и снижению его качества.
Цель изобретения - повышение надежности работы механизма накатки и повышение качества трикотажного полотна за счет стабилизации усилия его накатки.
(Л
-ч ел
00
д
о
00
Поставленная цель достигается тем, что в механизме, содержащем накатной валик, товарный валик, направляющие и цепную передачу движения накатному валику, направляющие для подъема товарного валика с рулоном полотна над ведущим валиком установлены с возможностью смещения валика от вертикальной оси и выполнены JB виде криволинейного профиля, описываемого кривой, координаты точек которой определяются из условия Л di +d2.
Я9
а arcsln
Ai f ± V 1 + f2 - A
1 +f где «i - угол радиус-вектора;
р - радиус вектор 1-й точки профиля направляющей;
di - диаметр накатного валика;
d2i - диаметр рулона полотна для i-ro его положения;
AI - параметр для 1-го положения рулона, определяется из условия
Al -QTTW + fsin/3-cos/)- где FH - усилие накатки полотна;
QI - вес товарного валика;
Q21 - вес рулона полотна диметром dai;
fa - приведенный коэффициент трения накатного валика по рулону полотна;
f - приведенный коэффициент трения товарного валика по направляющим;
J3 -угол наклона полотна, поступающего на рулон,
при этом за начало координат принято исходное вертикальное положение оси, проходящей через геометрические центры накатного и товарного валиков,
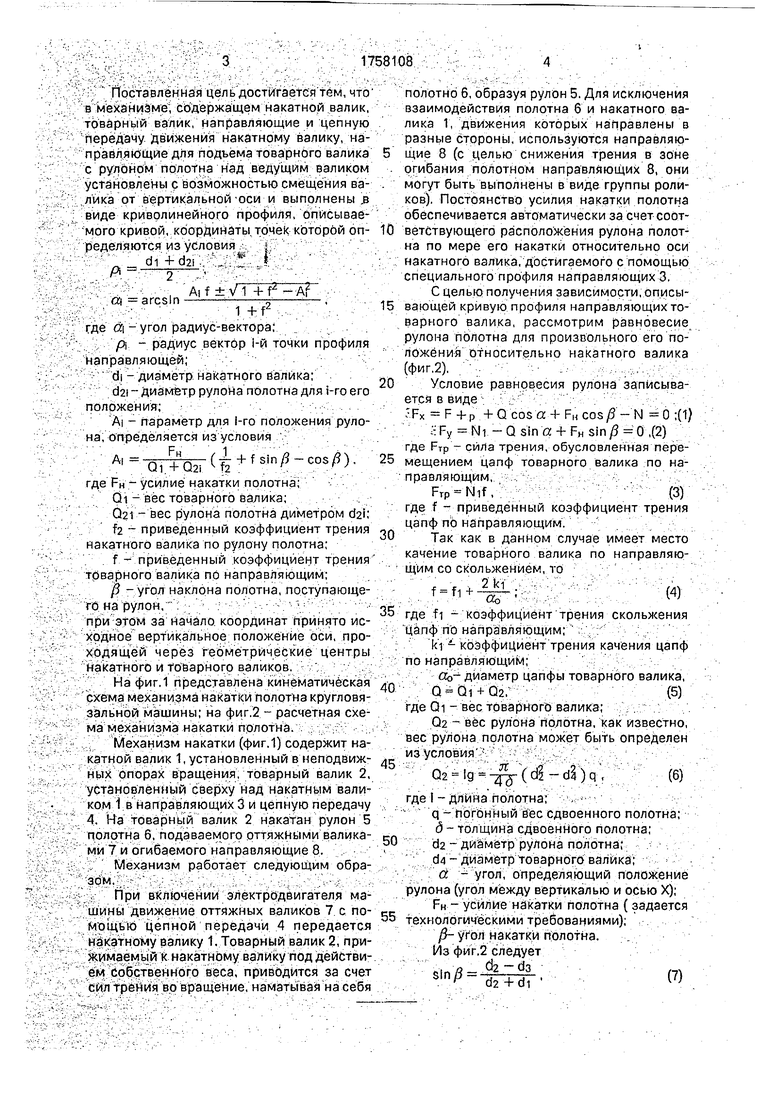
На фиг.1 представлена кинематическая схема механизма накатки полотна кругловя- зальной машины; на фиг.2 - расчетная схема механизма накатки полотна.
Механизм накатки (фиг.1) содержит накатной валик 1, установленный в неподвижных опорах вращения, товарный валик 2, установленный сверху над накатным валиком 1 в направляющих 3 и цепную передачу 4, На товарный валик 2 накатан рулон 5 полотна 6, подаваемого оттяжными валиками 7 и огибаемого направляющие 8.
Механизм работает следующим образом.
При включении электродвигателя машины движение оттяжных валиков 7 с помощью цепной передачи 4 передается накатному валику 1, Товарный валик 2, прижимаемый к накатному валику под действием собственного веса, приводится за счет сил трения во вращение, наматывая на себя
полотно 6, образуя рулон 5. Для исключения взаимодействия полотна б и накатного валика 1, движения которых направлены в разные стороны, используются направляющие 8 (с целью снижения трения в зоне огибания полотном направляющих 8, они могут быть выполнены в виде группы роликов). Постоянство усилия накатки полотна обеспечивается автоматически за счетсоответствующего расположения рулона полотна по мере его накатки относительно оси накатного валика, достигаемого с помощью специального профиля направляющих 3. С целью получения зависимости, описывающей кривую профиля направляющих товарного валика, рассмотрим равновесие рулона полотна для произвольного его положения относительно накатного валика (фиг.2).
Условие равновесия рулона записывается в виде Fx F+p +Qcosa + Fncos/3-N 0 ;(1)
- Fy N1 - Q sin a + FH sin /3 0 ,(2) где FTp - сила трения, обусловленная перемещением цапф товарного валика по направляющим,
Frp-Nif,(3)
где f - приведенный коэффициент трения цапф по направляющим.
Так как в данном случае имеет место качение товарного валика по направляющим со скольжением, ю
f fl+-2 l-;(4)
где fi - коэффициент трения скольжения цапф по направляющим;
ki коэффициент трения качения цапф по направляющим;
OQ- диаметр цапфы товарного валика, Q Qi + Q2.(5)
где СИ - вес товарного валика;
Qa - вес рулона полотна, как известно, вес рулона полотна может быть определен из условия
Q2 (cg-d3)q,(6)
где I - длина полотна;
q - погонный вес сдвоенного полотна; д - толщина сдвоенного полотна; da - диаметр рулона полотна; d4 - диаметр товарного валика; а - угол, определяющий положение рулона (угол между вертикалью и осью X);
FH - усилие накатки полотна {задается технологическими требованиями), ft- угол накатки полотна. Из фиг,2 следует
- тзг- 7
где di - диаметр накатного валика;
da - диаметр окружности направляющих полотна.
Из условия (2) получим
Ni Qslntf -FHsln/.(8)
Подставляя (8) в (3), находим , FTp Qfsina -FHfsln/
Поскольку усилие накатки полотна обеспечивается за счет сил трения, обусловленных прижатием рулона полотна к накатному валику, следовательно
FH Nf2,
где N - нормальное усилие прижатия рулона полотна к накатному валику;
f - приведенный коэффициент трения накатного валика по рулону полотна.
Так как в зоне прижатия рулона к накатному валику имеет место трение качения и скольжения (линейная скорость накатного валика всегда больше скорости оттяжки трикотажного полотна), то аналогично (4):
f2 f3 + 2-.(11)
где fa - коэффициент трения скольжения накатного валика по рулону полотна;
К2 - коэффициент трения качения накатного валика по рулону.
Из (10) имеем
N , h
(12)
Подставляя (9) и (12) в исходное уравнние (1), получим
F 1 cosa + f sin a - ( - + f sin / - cos /)
(13) или
V1 A -f sina, (14)
rAeA(-l + f ,6) (15)
Решая уравнение (14) относительно получим
Л-F -j-1/.t 1
(16)
а arcsin
Af ± Vf2 - А + 1
f2 + 1
f + 1
Таким образом, i-e положение геомет- рического центра рулона полотна (координата кривой, описывающей профиль направляющих товарного валика) для обеспечения условия FH const, может быть задана в векторной форме параметрами cinpi :
. Aif ±Vf2 -АГ + 1 ,,, а - arcsin -л ,(17)
л - d1 +d2l PI0
где а - угол между вертикалью, проходящей через центр накатного валика, и осью X, проходящей через центры накатного валика и рулона полотна с диаметром d2i,
10
15
20
25
30
35
40
45 50
AI - параметр, определяемый из (15) при диаметре рулона полотна, равном d2i;
pi - рздиус-оектор 1-й точки профиля направляющей.
При установке предлагаемого механизма накатки полотна на кругловязальную машину КО-2 с диаметром игольного цилиндра 450 мм при заправке х/б пряжей толщиной 18,5 текс в два конца, приняв в качестве исходных: Q 30,3 Н; Ри 30 Н, q 2,2 Н/м; (5 2,5 мм; di - 60 мм; da 80 мм; d4 50 мм; f 0,1; fa 0,5 (вес товарного валика Qi определен из уравнения (13), исходя из условия обеспечения накатки полотна с заданным усилием накатки FH 30 Н в начальный момент, когда товарный валик расположен строго вертикально над накатным валиком а 0°, пренебрегая весом полотна Q2 0) и, используя полученные ранее зависимости (6), (7), (15), (17) и (18), определим координаты нескольких точек профиля направляющих товарного валика, например для d20 й2мин d4 50 мм; d2i 80 мм; d22 200 мм; d23 400 мм1
«о 0;PQ 55 мм;
а 34°;/ 1 70 мм;
«2 57,5°; pi 130мм; «з 78,5°; рз 230 мм; что вполне реально.
Использование предлагаемой конструкции механизма накатки полотна кругло- вязальной машины позволяет по сравнению с известной повысить качество трикотажного полотна за счет постоянства усилия его накатки, упростить конструкцию механизма накатки и повысить надежность в работе механизма накатки полотна и машины в целом за счет упрощения конструкции механизма.0
Формула изобретения
Механизм накатки полотна кругловя- зальной машины, содержащий накатный валик с цепной передачей, товарный валик, установленный в направляющих над накатным валиком, отличающийся тем, что, с целью улучшения качества полотна за счет стабилизации натяжения при наматывании на товарный валик, направляющие выполнены с криволинейным профилем, координаты точек которого относительно центра накатного валика определяются из условия dt +d2i 2
55
f . AI f ± V 1 + f - Af o arcsin
1 +f/ где d - угол радиус-вектора;
p( - радиус-вектор i-й точки профиля направляющей;
di -диаметр накатного валика;
ctei - диаметр рулона полотна для 1-го его положения;
AI - параметр для 1-го положения рулона, определяемый из условия
)
где FH - усилие накатки полотна;
QI - вес товарного валика;
Qai - вес рулона полотна диаметром dzi;
h - приведенный коэффициент трения накатного валика по рулону полотна;
f - приведенный коэффициент трения товарного валика по направляющим;
/J - угол наклона полотна, поступающего на рулон.

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм намотки полотна кругловязальной машины | 1990 |
|
SU1772247A1 |
| Механизм намотки полотна кругловязальной машины | 1990 |
|
SU1772248A1 |
| Механизм намотки полотна кругловязальной машины | 1990 |
|
SU1758107A1 |
| Механизм намотки полотна кругловязальной машины | 1990 |
|
SU1740514A1 |
| Привод кругловязальной машины | 1986 |
|
SU1694733A1 |
| Механизм оттяжки полотна кругловязальной машины | 1990 |
|
SU1772246A1 |
| Механизм оттяжки полотна кругловязальной машины | 1991 |
|
SU1784685A1 |
| ТОВАРОПРИЕМНОЕ УСТРОЙСТВО К КРУГЛОТРИКОТАЖНОЙ МАШИНЕ | 1972 |
|
SU359322A1 |
| Устройство для накатки полотна на товарный валик | 1978 |
|
SU690097A1 |
| Машина для измерения длины и накатыванияВ РулОН ТЕКСТильНОгО пОлОТНА | 1978 |
|
SU821371A1 |
Использование: в кругловяззльних машинах. Сущность изобретения1 механизм накатки полотна содержит накатный валик с цепной передачей, товарный валик, установленный над накатным в направляющих криволинейного профиля, обеспечивающего постоянство давления товарного валика на накатный в процессе наработки полотна. 2 ил.
Фиг. 2 ,
8
Фиг. I
| Гарбарин В,Н | |||
| Проектирование трикотажных машин Л.: Машиностроение, 1980, с.414-416. |
