Изобретение относится к измерительной технике и может быть использовано для измерения линейного перемещения контролируемого органа относительно исходного положения или контролируемой поверхности.
Известен индуктивный преобразователь линейных перемещений, содержащий катушки индуктивности, которые посредством микропроцессора подключены к измерительному мосту. Коммутация катушек с мостом предусмотрена в различных вариантах их последовательного соединения.
Наиболее близким к предлагаемому является преобразователь линейных и угловых перемещений, содержащий статор, закрепленные на нем вдоль продольной оси статора изоляционные основы и несколько пар секций измерительной обмотки, одни концы из которых соединены в общий узел, а другие предназначены для присоединения к блоку обработки сигналов, и установ- ленный с возможностью линейного перемещения вдоль продольной оси преобразователя ферромагнитный якорь, активная часть которого равна длине годной секции измерительной обмотки. Кроме того, известный преобразователь содержит замкнутый магнитопровод с полюсными выступами и расположенные по разные стороны от полюсных выступов две обмотки возбуждения, создающие встречно направленные магнитные потоки возбуждения.
Недостатком данного преобразователя является сложность его конструкции, вызванная применением громоздкой магнитной системы возбуждения и якоря с зубцами.
Цель изобретения - упрощение конструкции преобразователя.
Поставленная цель достигается тем, что в преобразователе, содержащем статор, закрепленные на нем вдоль продольной оси преобразователя изоляционные основы и несколько пар секций измерительной обмотки, одни концы каждой из которых соединены в общий узел, а другие предназначены для присоединения к блоку обработки сигналов, и установленный с возможностью линейного перемещения вдоль продольной оси преобразователя якорь, активная часть которого равна длине годной секции измерительной обмотки, секции измерительной обмотки в каждой паре размещены по разные стороны от якоря на противоположных поверхностях статора со смещением, равным т. пары секций смещены одна относительно другой на величину, равную или кратную т, а изоляционные основы для секций обмотки выполнены в виде единых гибких подложек.
На чертеже представлена функциональная схема преобразователя.
Преобразователь содержит статор 1, относительно которого с возможностью линейного перемещения вдоль продольной оси 2 преобразователя установлен якорь 3. На статоре 1 вдоль продольной оси 2 закреплены изоляционные основы 4 и 5 (на чертеже с целью показа измерительной обмотки они условно развернуты на 90° относительно их истинного положения). На изоляционных основах 4 и 5, выполненных
в виде единых гибких подложек, расположены пары секций 6-7, 8-9, 10-11 и т.д. измерительной обмотки, одни концы 12 которой соединены в общий узел, а другие концы 13 предназначены для присоединения к блоку 14 обработки сигналов.
Секции выполнены методами интегральной технологии. При этом роль измерительных играют активные проводники секций 6 - 11, расположенные перпендикулярно продольной оси 2 преобразователя, а лобовые части образуют проводники, параллельные этой оси, которые при выполнении их на гибкой подложке могут быть выведены из зоны взаимодействия.
Общий узел выведен в середине секции, общая длина которой равна г. Секции измерительной обмотки в каждой паре 6 - 7, 8 - 9, 10 - 11 и т.д. размещены по разные стороны от якоря 3 на противоположных поверхностях статора 1 со смещением, равным г, а пары секций 6 - 7, 8 - 9, 10 - 11 и т.д. смещены одна относительно другой на величину, равную или кратную г. Последнее необходимо при использовании изобретения в применении к преобразователю с пространственным смещением измерительных обмоток (фаз) на величину р т /п, где п- целое число. В этом случае каждая из фаз (измерительных обмоток) может размещаться в промежутках между секциями, кратных т.
Длина активной части 15 якоря 3 во всех случаях равна г. При пространственном смещении фаз число активных частей 15 якоря
3 может быть равным числу фаз по прототипу. При этом информация о перемещении или направлении перемещения выделяется в виде фазы в блоке 14 обработки сигналов. Преобразователь может работать как с ферромагнитной активной частью 15, так и с экранирующим материалом, а также с размещенной на якоре 3 обмоткой возбуждения. При всех условиях необходимо выполнение указанных геометрических соотношений, которые ограничивают зону взаимодействия статора и активной части якоря. Выделение нулевого уровня (уровня начального взаимодействия) осуществляется в блоке обработки сигналов.
Работа преобразователя показана на примере выполнения ферромагнитной части якоря.
При подаче возбуждения соответствующие пары секций 6-7. 8-9, 10- 11 и т.д. от блока 14 обработки сигналов включаются последовательно и их индуктивность, зависящая от местонахождения активной части 15 якоря, фиксируется в блоке 14. При этом может быть определено как положение ак- тивной части якоря, так и его перемещение относительно соответствующей пары секций подключенной измерительной обмотки.
Значительно упрощается конструкция преобразователя за счет отказа от примене- ния громоздкой магнитной системы возбуждения.
Достоинством преобразователя является также его высокая точность, обеспечиваемая применением интегральных методов изготовления секций с последующим размещением их на изоляционном основании требуемой формы.
Формула изобретения
Преобразователь линейного перемещения, содержащий статор, закрепленные на нем вдоль продольной оси статора изоляционные основы и несколько пар секций измерительной обмотки, одни концы каждой из которых соединены в общий узел, а другие предназначены для присоединения к блоку обработки сигналов, и установленный с возможностью линейного перемещения вдоль продольной оси преобразователя якорь, активная часть которого равна длине, годной секции измерительной обмотки, отличающийся тем, что, с целью упрощения конструкции, секции измерительной обмотки в каждой паре размещены по разные стороны от якоря на противоположных поверхностях статора со смещением, равным г, пары секций смещены одна относительно другой на величину, равную или кратную т, а изоляционные основы дня этих пар выполнены в виде единых гибких подложек.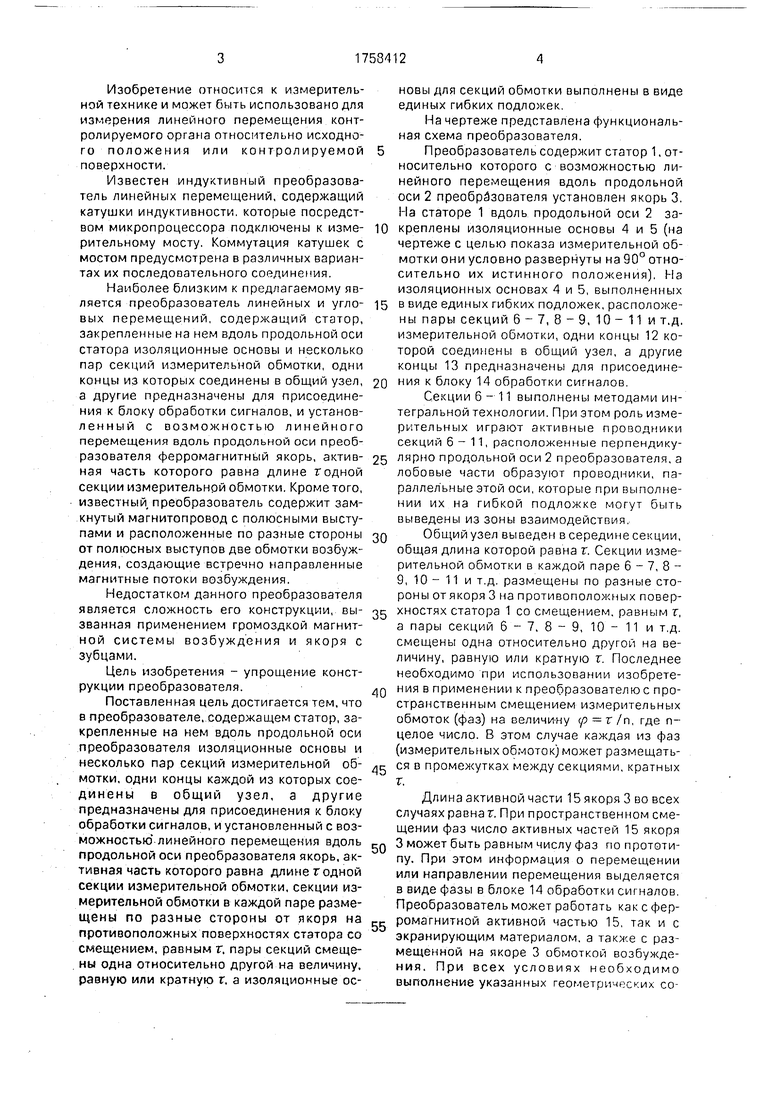
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный двигатель постоянного тока | 1979 |
|
SU1037387A1 |
| Преобразователь перемещений | 1986 |
|
SU1421981A1 |
| ВИБРОКОНТАКТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЛИНЕЙНЫХ ИЗМЕРЕНИЙ | 1990 |
|
RU2016374C1 |
| Дифференциальный трансформаторный преобразователь линейных перемещений | 1988 |
|
SU1523894A1 |
| Трансформаторный двухкоординатный преобразователь линейных перемещений | 1988 |
|
SU1657943A1 |
| Электрический двигатель постоянного тока | 1980 |
|
SU985894A1 |
| Электрический двигатель | 1981 |
|
SU983928A1 |
| СТАТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2004 |
|
RU2305889C2 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ИНДУКТОРНОГО ТИПА | 2003 |
|
RU2286642C2 |
| Преобразователь угловой скорости | 1982 |
|
SU1105818A1 |
Изобретение относится к измерительной технике. Цель изобретения - упрощение конструкции преобразователя линейного перемещения, на статоре 4 которого, не имеющем ферромагнитных детаfLS /э з я лей, размещены пары секций 6 - 7, 8 - 9 и 10-11 измерительной обмотки, одни концы 12 которых соединены в общий узел, а дру,- гие концы 13 присоединены к блоку обработки получаемых на них сигналов. Эти секции выполнены в виде плоских прямоугольных спиралей и размещены попарно с двух сторон от якоря 15 преобразователя, который установлен с возможностью линейного перемещения на его продольной оси. Длина якоря равна длине одной секции измерительной обмотки. Пары секций смещены одна относительно другой на величину, равную или кратную длине одной секции, и закреплены на общей для этих секций единой гибкой подложке. Преобразователь может работать как в амплитудном, так и в фазовом режиме работы благодаря пространственному смещению пар секций по длине преобразователя. 1 ил. (Л i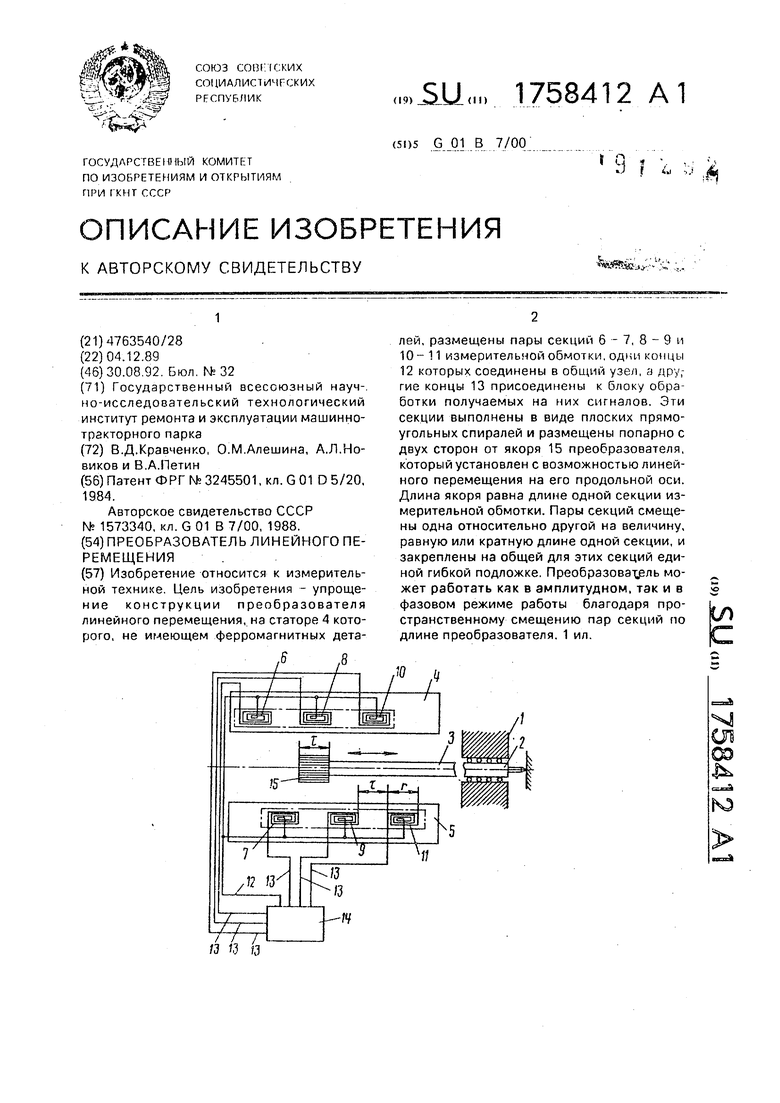
| Патент ФРГ № 3245501, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь угловых перемещений | 1988 |
|
SU1573340A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
