(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| АГРОМОСТ | 2002 |
|
RU2229202C2 |
| АГРОМОСТ | 2003 |
|
RU2242105C1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| АГРОМОСТ | 2003 |
|
RU2242104C2 |
| АГРОМОСТ | 2001 |
|
RU2196401C2 |
| АГРОКОМПЛЕКС | 2005 |
|
RU2283558C1 |
| АГРОМОСТ | 2003 |
|
RU2242106C1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Пропашной агрегат | 1990 |
|
SU1757491A1 |
| АГРОМОСТ | 2001 |
|
RU2189710C1 |
Использование: область сельхозмашиностроения, в частности средства управления рабочим курсом сельхозагрегата Сущность изобретения: рама сельхозмашины снабжена удлиненными навесными рычагами, обеспечивающими превышение реактивного момента горизонтального поворота сельхозмашины над одноименным моментом поворота агрегатированного с ним трактора, а агрегат обеспечивается гидроцилиндром с приводом от трактора и механизмом автоматизированного управления курсом агрегата, смонтированными на навеске, соединяющей трактор с сельхозмашиной. 4 ил.
Изобретение относится к сельскохозяйственному машиностроению.
Прототипом изобретения является способ автоматизированного управления курсом сельхозмашины вдоль стеблей растений(авт.св. № 631100, кл. А 01 В 69/00, бюл. № 41, 1978), у которого поводок от суммирующего устройства совмещен с рычагом управления гидрораспределителем.
Достигается лишь частичный эффект - управление только курсом сельхозмашины без обеспечения синхронного управления курсом трактора, да и то лишь в том случае, когда трактор загружен на крюке не более чем на 50% и обладает большим запасом тяги, позволяющим маневрировать курсом трактора за счет поочередного отключения тяги одной из гусениц бортовыми фрикционами. В случае полной крюковой нагрузки
трактора, обычно ограниченной пределом сопротивления пробуксовыванию гусениц трактора, попытка корректировки курса трактора по курсу сельхозмашины отключением тяги одной из гусениц еще более углуб- ляет рассинхронизацию траекторий движения машин агрегата из-за лишнего усложнения курса трактора от заглубления буксующей гусеницы, вызванного ее перегрузкой фактически в два раза вследствие отключения тяги первой, при этом неэффективно используется тяга трактора, а также допускаются повреждения неокрепших стеблей растений.
Цель изобретения - повышение качества управления сельхоззгрегатом.
Цель достигается тем, что величину параметра положения рядка относительно оси сельхозорудия формируют посредством реXI
сл ю
го о о
гистрации щупов, размещенных с двух сторон рядка растений. Сельхозорудие устанавливают на таком расстоянии от точки агрегатирования, что крутящий момент относительно этой точки превышает крутящий момент поворота сельхозмашины относительно этой же точки.
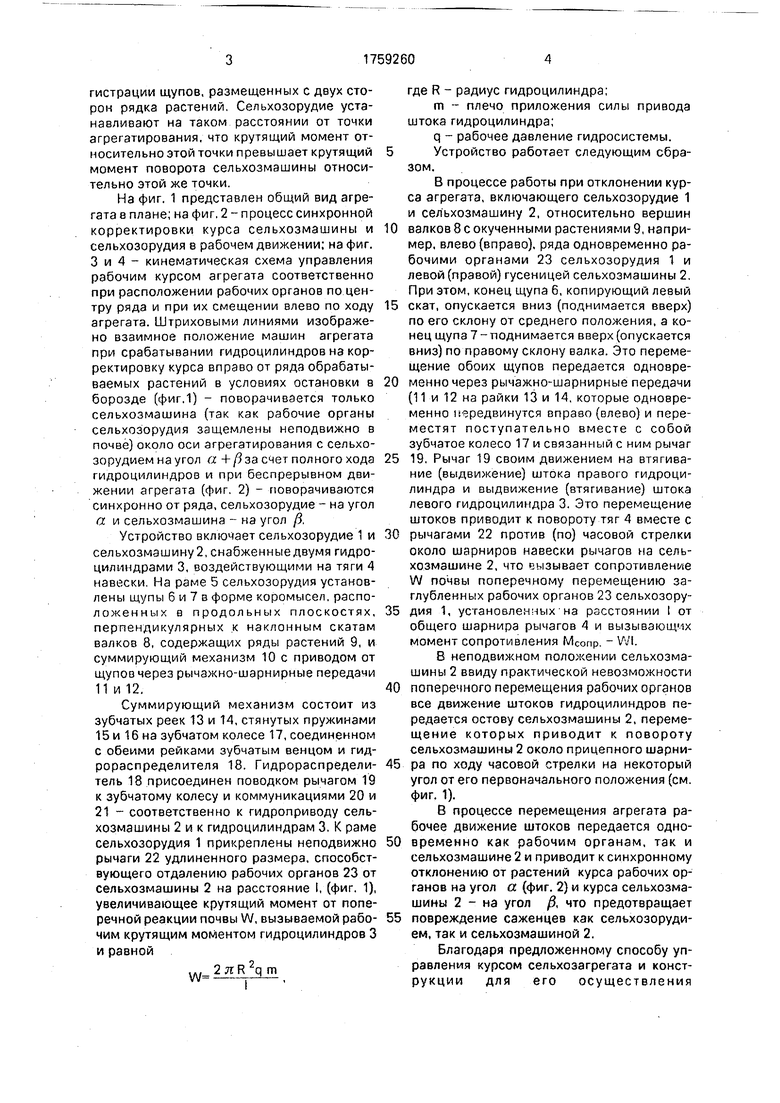
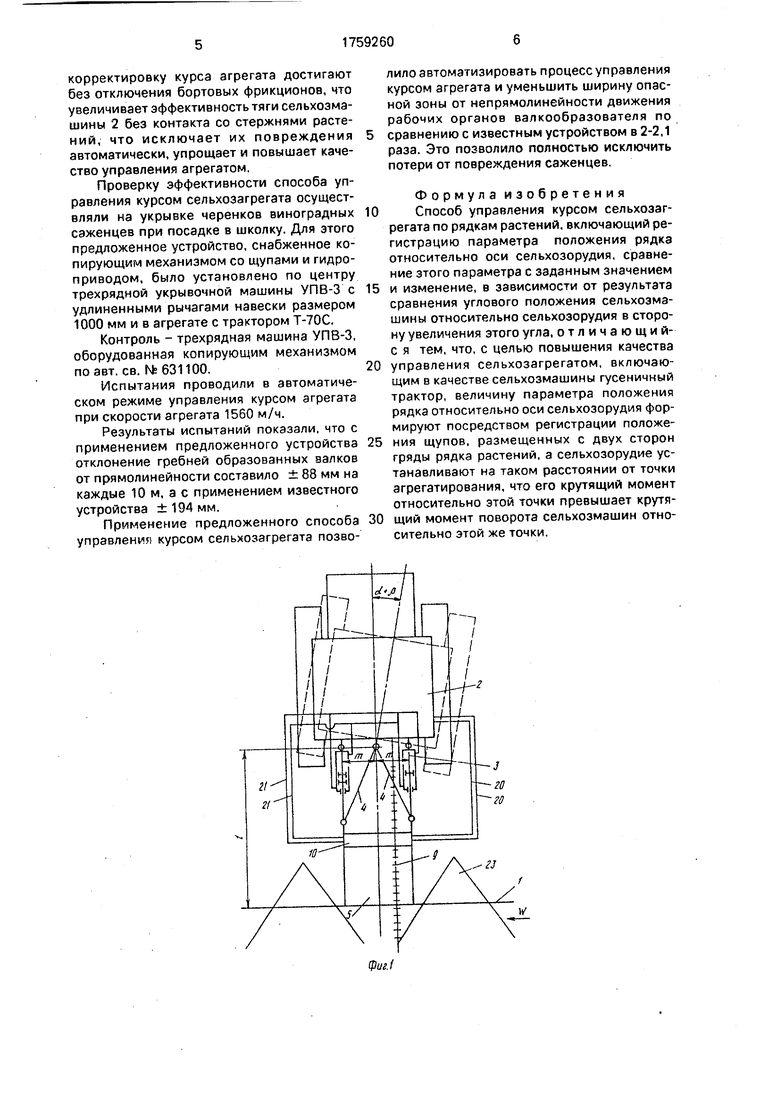
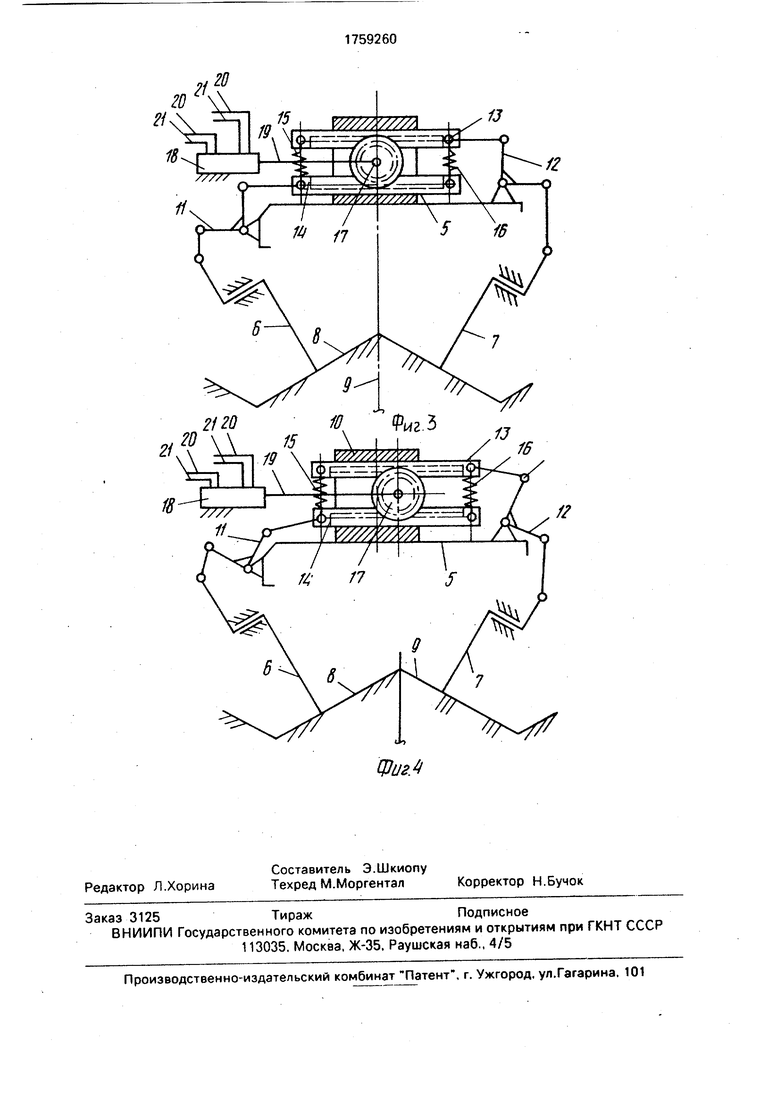
На фиг. 1 представлен общий вид агрегата а плане; на фиг. 2 - процесс синхронной корректировки курса сельхозмашины и сельхозорудия в рабочем движении; на фиг. 3 и 4 - кинематическая схема управления рабочим курсом агрегата соответственно при расположении рабочих органов по центру ряда и при их смещении влево по ходу агрегата. Штриховыми линиями изображено взаимное положение машин агрегата при срабатывании гидроцилиндров на корректировку курса вправо от ряда обрабатываемых растений в условиях остановки в борозде (фиг.1) - поворачивается только сельхозмашина (так как рабочие органы сельхозорудия защемлены неподвижно в почве) около оси агрегатирования с сельхо- зорудием на угол а + ft за счет полного хода гидроцилиндров и при беспрерывном движении агрегата (фиг, 2) - поворачиваются синхронно от ряда, сельхозорудие - на угол а и сельхозмашина - на угол Д
Устройство включает сельхозорудие 1 и сельхозмашину 2, снабженные двумя гидроцилиндрами 3, воздействующими на тяги 4 навески. На раме 5 сельхозорудия установлены щупы б и 7 в форме коромысел, расположенных в продольных плоскостях, перпендикулярных к наклонным скатам валков 8, содержащих ряды растений 9, и суммирующий механизм 10 с приводом от щупов через рычажно-шарнирные передачи 11 и 12.
Суммирующий механизм состоит из зубчатых реек 13 и 14, стянутых пружинами 15 и 16 на зубчатом колесе 17, соединенном с обеими рейками зубчатым венцом и гидрораспределителя 18. Гидрораспределитель 18 присоединен поводком рычагом 19 к зубчатому колесу и коммуникациями 20 и 21 - соответственно к гидроприводу сельхозмашины 2 и к гидроцилиндрам 3. К раме сельхозорудия 1 прикреплены неподвижно рычаги 22 удлиненного размера, способствующего отдалению рабочих органов 23 от сельхозмашины 2 на расстояние I, (фиг. 1), увеличивающее крутящий момент от поперечной реакции почвы W, вызываемой рабочим крутящим моментом гидроцилиндров 3 и равной
w 2 я R 2q m
где R - радиус гидроцилиндра;
m - плечо приложения силы привода штока гидроцилиндра;
q - рабочее давление гидросистемы.
Устройство работает следующим образом.
В процессе работы при отклонении курса агрегата, включающего сельхозорудие 1 и сельхозмашину 2, относительно вершин
валков 8 с окученными растениями 9, например, влево (вправо), ряда одновременно рабочими органами 23 сельхозорудия 1 и левой (правой) гусеницей сельхозмашины 2. При этом, конец щупа 6, копирующий левый
скат, опускается вниз (поднимается вверх) по его склону от среднего положения, а конец щупа 7-поднимается вверх (опускается вниз) по правому склону валка. Это перемещение обоих щупов передается одновременно через рычажно-шарнирные передачи (11 и 12 на райки 13 и 14, которые одновременно передвинутся вправо (влево) и переместят поступательно вместе с собой зубчатое колесо 17 и связанный с ним рычаг
рычагами 22 против (по) часовой стрелки около шарниров навески рычагов на сельхозмашине 2, что вызывает сопротивление W почвы поперечному перемещению заглубленных рабочих органов 23 сельхозорудия 1, установленчых на расстоянии I от общего шарнира рычагов 4 и вызывающих момент сопротивления МСопр. - WI.
В неподвижном положении сельхозмашины 2 ввиду практической невозможности
поперечного перемещения рабочих органов все движение штоков гидроцилиндров передается остову сельхозмашины 2, перемещение которых приводит к повороту сельхозмашины 2 около прицепного шарнира по ходу часовой стрелки на некоторый угол от его первоначального положения (см. фиг. 1).
В процессе перемещения агрегата рабочее движение штоков передается одновременно как рабочим органам, так и сельхозмашине 2 и приводит к синхронному отклонению от растений курса рабочих органов на угол а (фиг. 2) и курса сельхозмашины 2 - на угол Д что предотвращает
повреждение саженцев как селъхозоруди- ем, так и сельхозмашиной 2.
Благодаря предложенному способу управления курсом сельхозагрегата и конструкции для его осуществления
корректировку курса агрегата достигают без отключения бортовых фрикционов, что увеличивает эффективность тяги сельхозмашины 2 без контакта со стержнями растений, что исключает их повреждения автоматически, упрощает и повышает качество управления агрегатом.
Проверку эффективности способа управления курсом сельхозагрегата осуществляли на укрывке черенков виноградных саженцев при посадке в школку. Для этого предложенное устройство, снабженное копирующим механизмом со щупами и гидроприводом, было установлено по центру трехрядной укрывочной машины УПВ-3 с удлиненными рычагами навески размером 1000 мм и в агрегате с трактором Т-70С.
Контроль - трехрядная машина УПВ-3, оборудованная копирующим механизмом по авт. св. №631100.
Испытания проводили в автоматическом режиме управления курсом агрегата при скорости агрегата 1560 м/ч.
Результаты испытаний показали, что с применением предложенного устройства отклонение гребней образованных залков от прямолинейности составило ± 88 мм на каждые 10 м, а с применением известного устройства ±194 мм.
Применение предложенного способа управления курсом сельхозагрегата позволило автоматизировать процесс управления курсом агрегата и уменьшить ширину опасной зоны от непрямолинейности движения рабочих органов валкообразователя по сравнению с известным устройством в 2-2,1 раза. Это позволило полностью исключить потери от повреждения саженцев,
Формула изобретения Способ управления курсом сельхозагрегата по рядкам растений, включающий регистрацию параметра положения рядка относительно оси сельхозорудия, сравнение этого параметра с заданным значением и изменение, в зависимости от результата сравнения углового положения сельхозмашины относительно сельхозорудия в сторону увеличения этого угла, отличающий- с я тем, что, с целью повышения качества управления сельхозагрегатом, включающим в качестве сельхозмашины гусеничный трактор, величину параметра положения рядка относительно оси сельхозорудия формируют посредством регистрации положения щупов, размещенных с двух сторон гряды рядка растений, а сельхозорудие устанавливают на таком расстоянии от точки агрегатирования, что его крутящий момент относительно этой точки превышает крутящий момент поворота сельхозмашин относительно этой же точки.
Щи г. 2
2120 Я.
| Устройство для автоматического направления сельскохозяйственной машины по рядкам или междурядьям стеблевых культур | 1977 |
|
SU631100A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
