Изобретение относится к области угловых измерений и может быть использовано в геодезии для определения уклонений отвесных линий при развитии геодезических сетей.
Известен способ определения уклонения отвесной линии, состоящий в измерении на определяемом пункте (пункты Лапласа) астрономических широты р идол- готы Я и геодезических широты В и долготы L и определении составляющих Ј и г) (в плоскости меридиана и первого вертикала) по известным формулам 1
Недостатком этого способа является большая трудоемкость, обусловленная главным образом необходимостью выполнения высокоточных астрономических наблюдений. Поэтому в промежуточных пунктах между пунктами Лапласа уклонения отвесных линий определяют способом интерполяции с использованием гравиметрических измерений. Однако отсутствие необходимой плотности гравиметрических данных приводит к большим ошибкам в определении уклонении отвесных линий, особенно в горных районах 2.
Наиболее близким к предлагаемому техническому решению является способ определения уклонения отвесной пинии, состоящий в том, что на доу. исходных пунктах С известными уклонениями отвесных линий устанавливают источники плоско поляризо ванного светового излучения ориеншрукл плоскости поляризации параллельно outer
vi
S
(л)
|Ы
ным линиям в этих пунктах, направляют излучение на определяемый пункт, в котором устанавливают приемную оптическую систему с поляризационным анализатором,ось которого ориентируют параллельно отвесной линии в определяемом пункте, при помощи анализатора измеряют проекции углов, образованных отвесными линиями определяемого пункта и исходных пунктов в плоскостях, перпендикулярных к направлениям с определяемого пункта на исходные пункты, а уклонения отвесных линий определяют расчетным путем 3.
Недостатком данного способа является низкая точность, обусловленная фарадеев- ским вращением плоскости поляризации светового излучения в магнитном поле Земли. Угол поворота плоскости поляризации излучения, прошедшего путь L в магнитном поле с напряженностью Н вдоль направления распространения излучения, определяется известной формулой
V
-v
Н(х) dx.
(D
где V - постоянная Верде.
При L 10 км, Н 0,3 Э угол поворота в воздухе составит 2,13 угловых минут. Поскольку точное значение интеграла в (1) неизвестно, то и учесть фарадеевское вращение в указанном способе невозможно.
Целью изобретения является повышение точности определения уклонения отвесной линии.
Цель достигается тем, что согласно способу определения уклонения отвесной линии, включающему формирование на двух исходных пунктах первых световых поляризованных лучей с плоскостями поляризации, параллельными отвесным линиям в соответствующих пунктах, регистрацию этих лучей в первых каналах на определяемом пункте и дальнейшую обработку результатов измерений, в исходных пунктах дополнительно формируют вторые поляризованные лучи, когерентные первым, с плоскостями поляризации, перпендикулярными плоскостям поляризации соответствующих первых лучей, и отстоящие от них на измеренное расстояние вдоль соответствующих отвесных линий, а на определяемом пункте совмещают соответствующие первые и вторые лучи и формируют интерференционную картину, по которой измеряют оптическую разность хода лучей, а на каждом из пунктов дополнительно синхронно измеряют зенитные расстояния осевых линий световых лучей и измеренные величины используют при обработке результатов.
Сопоставительный анализ заявляемого технического решения с прототипом показывает, что заявляемый способ отличается от известного дополнительной операцией - формированием интерференционной картины и определением оптической разности хода лучей.
Известные технические решения не обеспечивают определение точных значений уклонений отвесных линий в районах с редкой плотностью гравиметрической съемки, что достигается в заявляемом техническом решении. Это позволяет сделать вывод о его соответствии критерию существенные отличия.
Расщепление излучения источников на два пучка, разнесенных вдоль отвесной линии, ориентирование плоскостей поляризации этих пучков одного вдоль, а другого перпендикулярно направлению отвесной линии, измерение оптической разности хода принимаемых световых пучков, синхронное измерение взаимно обратных зенитных расстояний позволяют определить уклонения отвесной линии на определяемом пункте с ошибкой 0,1 -0,5 .
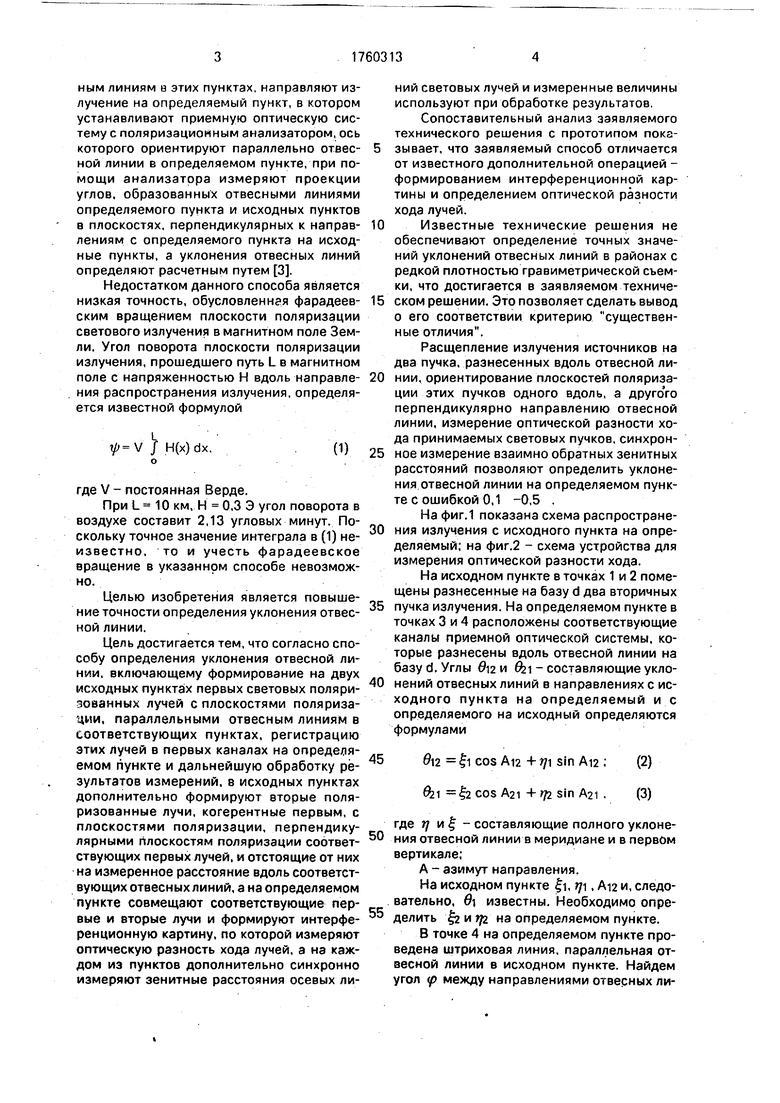
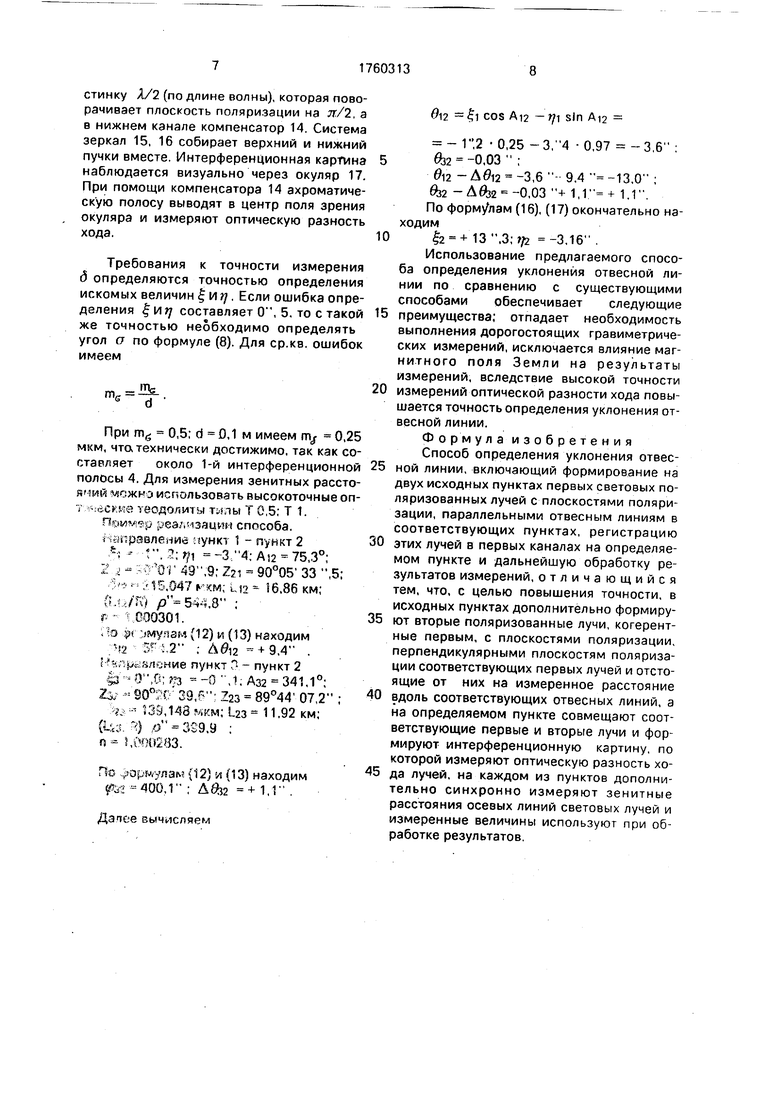
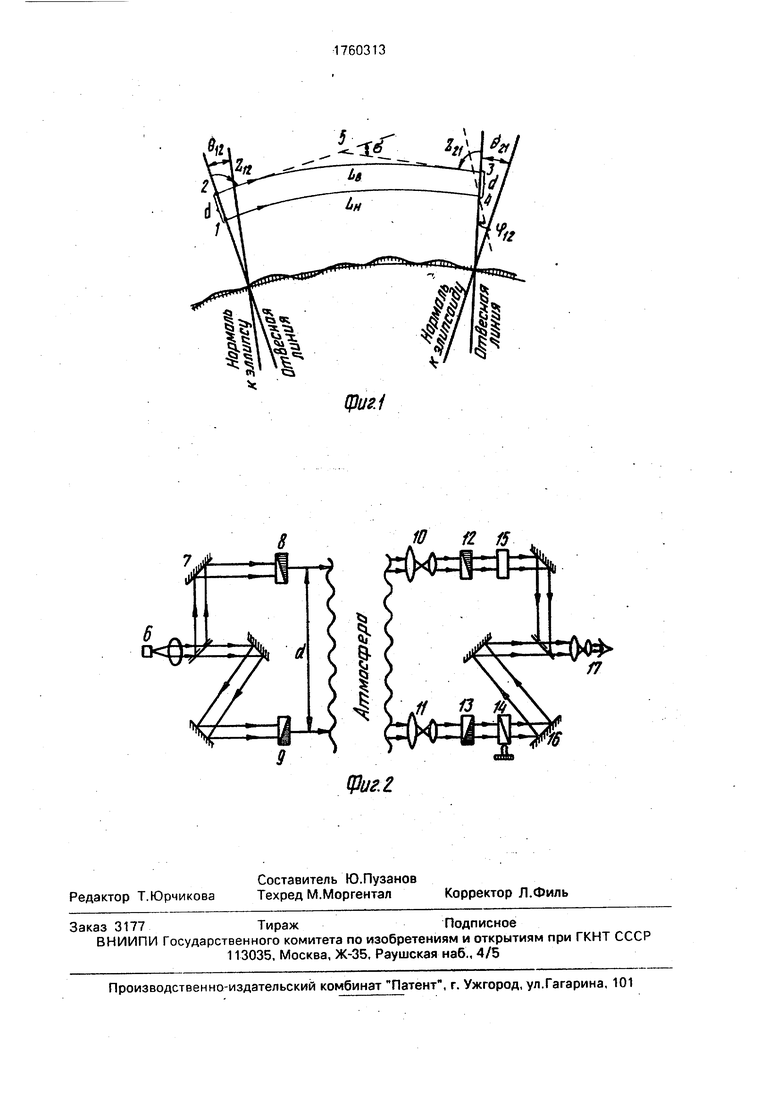
На фиг.1 показана схема распространения излучения с исходного пункта на определяемый; на фиг.2 - схема устройства для измерения оптической разности хода.
На исходном пункте в точках 1 и 2 помещены разнесенные на базу d два вторичных
пучка излучения. На определяемом пункте в точках 3 и 4 расположены соответствующие каналы приемной оптической системы, которые разнесены вдоль отвесной линии на базу d. Углы 612 и 6bi - составляющие уклонений отвесных линий в направлениях с исходного пункта на определяемый и с определяемого на исходный определяются формулами
012 Ј1 cos Ai2 4- rj sin Ai2 ; (2)
$21 Ј2 cos A21 + rji sin A21 , (3)
где rj и Ј - составляющие полного уклоне- ния отвесной линии в меридиане и в первом вертикале;
А - азимут направления. На исходном пункте |i, /1. Ai2 и, следовательно, в известны. Необходимо опре- делить %2 и rjz на определяемом пункте.
В точке 4 на определяемом пункте проведена штриховая линия, параллельная отвесной линии в исходном пункте. Найдем угол р между направлениями отвесных линий в исходном и определяемом пунктах. Согласно фиг. 1 имеем
I 10
+012-021.
К
где L/R - угол между нормалями к эллипсоиду;
L - горизонтальное положение;
R - средний радиус кривизны сечения эллипсоида.
Как следствие наклона базы d приемной оптической системы на определяемом пункте на угол р относительно базы d источников излучения на исходном пункте, а также из-за вертикального градиента пока- зателя преломления воздуха, вдоль трассы, между верхним и нижним оптическими путями световых пучков имеется оптическая разность хода.
Оптическая разность хода определяется интегралами вдоль лучевых линий
n(l)dl-/n(l)dl
LBLH
д - у d - d +
+ dn
tg n
(11)
sin 2.1 - cos 2.1 tg
относительно неизвестного ( . Учитывая малое значение (р , находим решение
фп SlnZ2l(6-yd)
12 d(n-1) + cosZ2i(a-yd) U/J
В соответствии с выражением (4), если известно, то можно найти
15
Л 012 -L.12/R .
(13)
20
Пусть аналогично найдено Д0зз Тогда согласно выражениям (2) и (3) для направлений 2-3 и 1-4 имеем
$23 §2 COS A23 +
+ ф. Sin A23 032 - Л 032 I
02 & COS A21 +
+ /2 Sin An #12 - Л 012 (14)
(15)
Изобретение относится к области геодезических измерений, в частности к способам определения уклонения отвесных линий при развитии геодезических сетей. Сущность изобретения: на каждом из двух исходных пунктах формируют два параллельных когерентных световых луча со взаимно перпендикулярными плоскостями поляризации, на определяемом пункте со- вмещзют соответствующие лучи и формируют интерференционную картину. По этой картине определяют оптическую разность хода лучей Дополнительно на всех пунктах синхронно измеряют зенитные расстояния осевых линий световых лучей. Измеренные величины используют при вычислении уклонения отвесной линии в определяемом пункте. 2 ил.
LH
/ пв О) - пн (I) dl + ,
30
JU .. (012 A On) A23 - (032 Д 032) COS A21
где n (I) - текущее значение показателя пре- Ј2 -sin (A21 - Ааз)
ломления воздуха;м§
ls-з - расстояние между точками 5 и 3 на
Фиг-1- -ог (12 - ) sin A23 - (fe2 - AfaQ sin A21
Учитывая, что35 (А21-А23)
ПВ ПН +
dn I
dy L1 и определяя угол полной рефракции
, о dy
из (5) получаем
д - d a + nd sin
Sin (221 )
На исходном пункте 1 и определяемом 4 выполнены измерения зенитных расстояний Zi2 и Z21, тогда
0 180°-Zi2-Z2i + р12 . (9)
где у Zi2 + Z2i - 180°(10)
Подставляя уравнение (9) в выражение (8), получаем уравнение
(5)
Решение этих двух уравнений относительно 2 и rfi имеет вид
30
JU
(6)
7)
(8)
40
45
50
емом стоя. (9) 55
(10)
ение
(17)
Таким образом, по известным значением $12 и $32 . А21, А2з и вычисленным значениям А 012 и Д#з2 на основе измерений оптической разности хода и зенитных расстояний можно определить искомые значения 2 и rfi - составляющие уклонения отвесной линии в определяемом пункте.
Устройство для измерения оптической разности хода на определяемом пункте работает следующим образом (фиг.2). Излучение теплового источника 6 света проходит систему зеркал 7, где расщепляется на два пучка - верхний и нижний. Скрещенные поляроиды 8 и 9 ориентированы соответственно вдоль и перпендикулярно направлению отвесной линии в исходном пункте. На определяемом пункте излучение принимается оптической системой 10, 11 по двум каналам, поляроиды 12 и 13 ориентированы по максимуму пропускания излучений, соответствующих поляризации. Принимаемое излучение проходит в верхнем канале пластинку Я/2 (по длине волны), которая поворачивает плоскость поляризации на л/2, а в нижнем канале компенсатор 14. Система зеркал 15, 16 собирает верхний и нижний пучки вместе. Интерференционная картина наблюдается визуально через окуляр 17. При помощи компенсатора 14 ахроматическую полосу выводят в центр поля зрения окуляра и измеряют оптическую разность хода.
Требования к точности измерения д определяются точностью определения искомых величин . Если ошибка определения составляет 0, 5. то с такой же точностью необходимо определять угол а по формуле (8). Для ср.кв. ошибок имеем
™б
При тб 0,5; d 0,1 м имеем irtj 0,25 мкм, чта технически достижимо, так как составляет около 1-й интерференционной полосы 4. Для измерения зенитных расстояний пжиэ использовать высокоточные оп- т е,сте теодолиты тллы Т 0,5; Т 1. Пшг. реализации способа. 1 чл-равлениё :гуню 1 - 2
-; Г , 1; ф -3 4; An - 75,3°; Г - -, ОТ 49,9; Z21 90°05 33 ,5;
- /15.047 км; U2 - 16.86 км; «f..- /Ю .8 ; г С00301.
, -о |« % муяам (12) и (13) находим 2 5Г:2 ; Л012 - + 9,4 . ,г±/г клоние пункт Г - пункт 2 $3 -0, -0 ,1,Аз2 341,1°; 2 « 90°, Г 39, 223 89°44 07,2 ; К 539,148 км; L23 11.92 км;
(Ц,: ) С: п- ,№(ЈЧЗ.
J9.9
По /ормулам {12) м (13) находим fM -400,1 ; АЙ32 + 1,1 .
Дапсе вычисляем
#12 Ј1 cos Ai2 - /1 sin Ai2
- Г.2 0,25 - 3,4 0,97 - 3,6 ;
ft2 -0,
-3, 9.4 -13, 6b2 -Д6Ь2 -0,03 +1, 1.1. По формулам (16), (17) окончательно находим
Ј + 13 ,3; -3,16.
Использование предлагаемого способа определения уклонения отвесной линии по сравнению с существующими способами обеспечивает следующие
преимущества; отпадает необходимость выполнения дорогостоящих гравиметрических измерений, исключается влияние магнитного поля Земли на результаты измерений, вследствие высокой точности
измерений оптической разности хода повышается точность определения уклонения отвесной линии.
Формула изобретения Способ определения уклонения отвесной линии, включающий формирование на двух исходных пунктах первых световых поляризованных лучей с плоскостями поляризации, параллельными отвесным линиям в соответствующих пунктах, регистрацию
этих лучей в первых каналах на определяемом пункте и дальнейшую обработку результатов измерений, отличающийся тем, что, с целью повышения точности, в исходных пунктах дополнительно формируют вторые поляризованные лучи, когерентные первым, с плоскостями поляризации, перпендикулярными плоскостям поляризации соответствующих первых лучей и отстоящие от них на измеренное расстояние
вдоль соответствующих отвесных линий, а на определяемом пункте совмещают соответствующие первые и вторые лучи и формируют интерференционную картину, по которой измеряют оптическую разность хода лучей, на каждом из пунктов дополнительно синхронно измеряют зенитные расстояния осевых линий световых лучей и измеренные величины используют при обработке результатов.
№/
10 К 15
W
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Практикум по высшей геодезии./ Под редакцией Н.В.Яковлева, М.: Недра, 1982 | |||
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Инструментальные методы геодезической рефрактометрии | |||
| - Итоги науки и техники | |||
| Геодезия и аэрофотосъемка | |||
| М | |||
| ВИНИТИ, 1979, Т.15.С.9, 29-30 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Определение разно сти уклонений отвесных линий по наблюдениям в поляризованном сеете | |||
| - Изв | |||
| вузов, сер | |||
| Геодезия и аэрофотосъемка | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
