Изобретение относится к способам определения координат источников электромагнитных излучений с помощью наземных оптических средств путем регистрации и измерения поляризационных характеристик регистрируемого светового излучения. Источниками света могут быть, например, осветительные фотозаряды, фотоавиабомбы типа «Фотаб», болиды или метеориты, траекторию которых нужно определить.
Известен способ определения угловых координат источника по поляризационным характеристикам рассеянного земной атмосферой оптического излучения [1]. Реализация способа состоит в измерении азимута поляризации χ солнечного излучения. По измеренному значению χ определяют угловые координаты источника. Недостатком способа является невозможность определения пространственных координат источника.
Другим аналогом может служить способ определения дальности до импульсного светового сферического источника путем регистрации и измерения степени поляризации рассеянного излучения [2]. Способ основан на том, что регистрируют излучение под заданным углом относительно направления на источник. В процессе рассеяния излучение становится частично поляризованным. По мере распространения излучения степень поляризации сначала возрастает, достигает максимума, а затем снова уменьшается. Отслеживая развитие степени поляризации во времени, отсчитываемого от начала вступления импульса прямого излучения от источника, измеряют время достижения максимума поляризации и по измеренному значению определяют расстояние до источника. Недостатком способа является необходимость наличия прямой видимости на источник и точного фиксирования времени прихода прямого излучения.
Прототипом служит способ определения эпицентрального расстояния и высоты источника ультрафиолетового излучения с помощью средств космического базирования [3]. Способ основан на том, что при помощи оптического поляриметрического устройства, установленного на спутнике с известной высотой орбиты, регистрируют ультрафиолетовое рассеянное земной атмосферой излучение. Излучение регистрируют не менее чем в двух оптических каналах, оптические оси которых ориентированы под определенным углом относительно надира и которые вращаются вокруг общей вертикальной оси. Оптические оси каналов и ось вращения лежат в одной плоскости референции. В каждом канале устанавливают поляризационные анализаторы, у которых оси полного пропускания поляризованной компоненты лежат в этой же плоскости референции. При вращении плоскости референции азимут поляризации χ в обоих каналах меняется. Поэтому изменяются и амплитуды оптического сигнала от поляризованной компоненты. В соответствии с законом Малюса [1] эта амплитуда пропорциональна cosχ2. Вращая плоскость референции, измеряют амплитуду сигнала от поляризованной компоненты излучения и фиксируют положение плоскости, при котором сигнал в обоих каналах равен нулю. При дальнейшем вращении измеряют угол поворота плоскости референции относительно зафиксированного положения, при котором в одном из каналов сигнал становится максимальным. В этот момент измеряют азимут поляризации χ в противоположном канале. По измеренным значениям углов определяют эпицентральное расстояние и высоту источника.
Техническая проблема заключается в том, что, как считалось ранее, для определения местоположения движущегося объекта необходимым является условие прямой видимости. Реализация предлагаемого изобретения позволит решить проблему определения местоположения самосветящегося объекта и его траектории при отсутствии прямой видимости на него.
Технический результат предлагаемого изобретения состоит в том, что при помощи оптического поляриметрического устройства, установленного в двух и более наземных пунктах наблюдения Nm, следят за изменением азимута поляризации χm рассеянного атмосферой светового излучения от источника, координаты которого нужно определить. Число т - это номер пункта наблюдения. При этом не требуется наличие прямой видимости на источник. По результатам измерений определяют координаты объекта. Если координаты меняются, то объект движется.
Технический результат достигается тем, что в каждом пункте наблюдения регистрируют поляризованную компоненту рассеянного атмосферой светового излучения в двух узких оптических каналах, вращающихся вокруг общей вертикальной оси, направленной в зенит. Оси полей зрения каналов устанавливают под углом θотносительно вертикали так, чтобы они и ось вращения лежали в одной плоскости, которая называется плоскостью референции. В каждом оптическом канале устанавливают поляризационные анализаторы, у которых оси полного пропускания поляризованной компоненты лежат в плоскости референции. При вращении плоскости референции вокруг вертикальной оси амплитуда оптического сигнала от поляризованной компоненты изменяется, поскольку меняется азимут поляризации χ. Вращая плоскость референции, фиксируют угол поворота, когда сигнал от поляризованной компоненты в обоих каналах обращается в нуль. Этот угол указывает направление на источник, т.е. его относительный азимут αm. Азимут αm измеряют относительно прямой линии, соединяющей два соседних пункта наблюдения Nm и Nm+1. При дальнейшем вращении в каждом пункте Nm измеряют угол поворота ϕm, при котором сигнал от поляризованной компоненты в одном из двух каналов становится максимальным. Этот угол измеряют относительно фиксированного угла вращения плоскости референции, при котором сигнал от поляризованной компоненты регистрируемого светового излучения в обоих каналах обращается в нуль. По результатам измерений углов ϕm и αm во всех пунктах наблюдения при известном расстоянии между ними (база) определяют эпицентральное расстояние Rm и высоту источника h, а также зенитный угол θи источника. Если объект движется, то по изменению со временем этих параметров можно определить траекторию объекта..
Предлагаемый способ отличается от прототипа тем, что вместо средств космического базирования применяют наземные пункты наблюдения. Другое отличие - вместо известной высоты спутника в качестве базы используют расстояние между пунктами наблюдения.
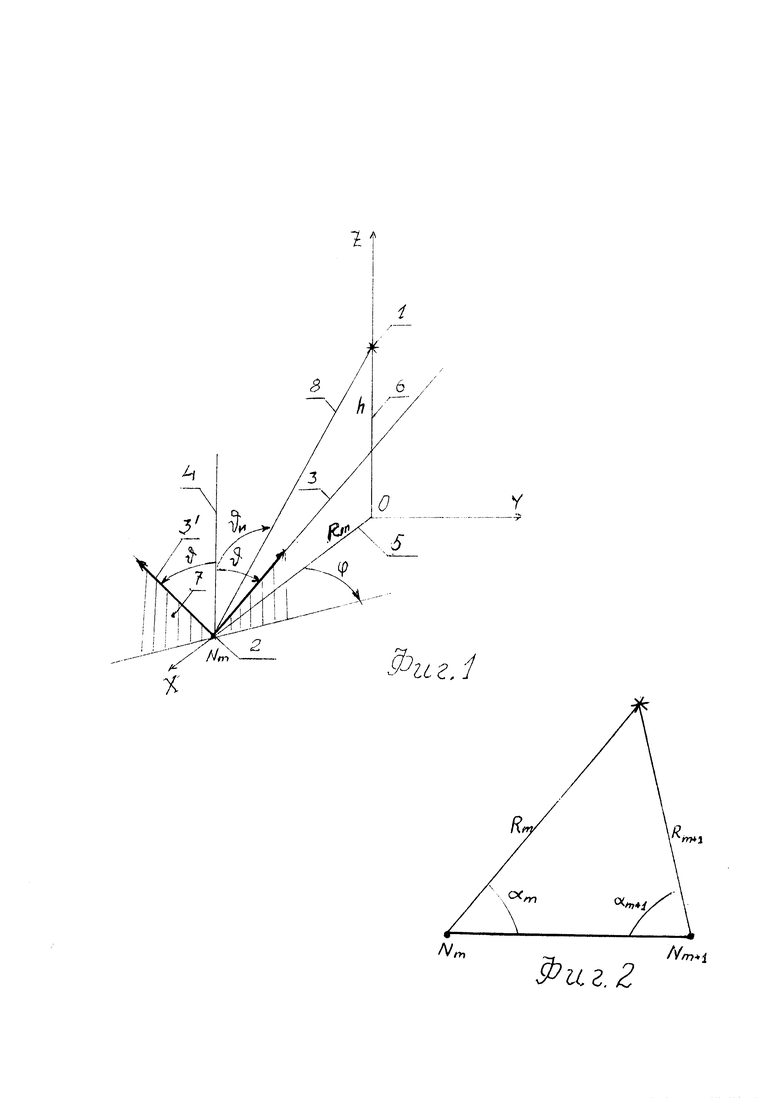
Схема реализации способа представлена на фиг. 1, где показаны: 1 - источник светового излучения; 2 - поляриметрическое устройство, установленное в каждом пункте Nm; 3 и 3' - оси двух оптических каналов; 4 - ось, вокруг которой вращаются два канала; 5 - искомое эпицентральное расстояние Rm между точками О и Nm; 6 - высота источника h; 7 - плоскость референции; 8 - направление на источник; θи - зенитный угол источника; θ - угол наклона оптических осей поля зрения относительно вертикали; ϕ - угол поворота плоскости референции.
Суть способа состоит в следующем. Пусть на высоте h от земной поверхности (плоскость XOY на фиг. 1) возник источник светового излучения. Световые лучи рассеиваются атмосферой, приобретая значительную степень поляризации примерно от 0,1 до 0,8. Поляризованная компонента рассеянных лучей попадает в поля зрения двух каналов оптического поляриметрического устройства 2. Оси 3 и 3 полей зрения ориентированы под заданным углом θ относительно зенита. Оси 3-4-3' на фиг. 1 образуют плоскость референции, которая вращается вокруг оси 4. Когда сигнал от поляризованной компоненты в обоих каналах равен нулю, это означает, что угол ϕ=0, поскольку в этот момент плоскость референции совпадает с плоскостью вертикала источника, образуемая линиями 6 и 8 и, следовательно, плоскость поляризации перпендикулярна оси полного пропускания поляризационных анализаторов. В этот момент измеряют относительные азимуты αm источника. При дальнейшем вращении плоскости референции в некоторый момент оптический сигнал от поляризованной компоненты в одном из каналов достигает максимума, поскольку в этот момент ось полного пропускания поляризационного анализатора в этом канале совпадает с плоскостью поляризации регистрируемого излучения. В этот момент измеряют угол ϕm, соответствующий максимуму поляризованной компоненты в данном канале. Зенитный угол источника определяют по формуле:

Эпицентральное расстояние определяют следующим образом. Пусть в двух соседних пунктах наблюдения Nm и Nm+1 с базой b между ними измерены относительные азимуты источника αm и αm+1 (см. фиг. 2). Относительные азимуты - это углы между направлениями на источник и линией, проходящей через пункты Nm и Nm+1. Эпицентральное расстояние от источника до пункта наблюдения Nm определяют по формуле:

Расстояние до второго пункта определяют по такой же формуле, но угол αm+1 заменяют на угол αm.
Высоту источника определяют по формуле:

Таким образом, измерив углы ϕm, αm и αm+1, при заданной величине угла θ определяют не только угловые, но и пространственные координаты источника, не наблюдая его самого.
Источники информации:
1. Шерклифф У. Поляризованный свет. - М: Мир, 1965.
2. Пузанов Ю.В. Поляризация излучения как индикатор расстояния до импульсного источника. - Известия РАН, серия «Физика атмосферы и океана», 1993, т. 29, №4, стр. 574-576.
3. Пузанов Ю.В. Способ определения эпицентрального расстояния и высоты сферического источника ультрафиолетового излучения с помощью средств космического базирования. - Патент РФ №2672674, 2017 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения эпицентрального расстояния и высоты сферического источника ультрафиолетового излучения с помощью средств космического базирования | 2017 |
|
RU2672674C1 |
| Способ измерения степени поляризации светового излучения молний и устройство для его осуществления (варианты) | 2020 |
|
RU2761781C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОПТИКО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТОВ | 1997 |
|
RU2107281C1 |
| СПОСОБ ЛАЗЕРНОГО ЗОНДИРОВАНИЯ АТМОСФЕРНЫХ КРИСТАЛЛИЧЕСКИХ ОБРАЗОВАНИЙ | 2021 |
|
RU2772071C1 |
| ПОЛЯРИМЕТРИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ВЗАИМНОГО РАЗВОРОТА | 1992 |
|
RU2047836C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОПТИКО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 1998 |
|
RU2156453C1 |
| ПОЛЯРИЗАЦИОННЫЙ ДАТЧИК ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2006 |
|
RU2343507C2 |
| Способ и система для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров | 2022 |
|
RU2804147C1 |
| Поляриметр для измерения концетрации сахара в моче | 1990 |
|
SU1749783A1 |
| Оптическое измерительное устройство | 1988 |
|
SU1672312A1 |
Изобретение относится к способам определения координат источников электромагнитных излучений с помощью наземных средств наблюдения путем регистрации и измерения поляризационных характеристик регистрируемого излучения в нескольких пунктах. Техническим результатом является обеспечение возможности определения местоположения самосветящегося объекта и его траектории при отсутствии прямой видимости на него. Способ заключается в том, что при помощи оптического поляриметрического устройства, установленного в каждом пункте, регистрируют рассеянное земной атмосферой световое излучение от сферического самосветящегося источника. Излучение регистрируют в двух оптических каналах, оптические оси которых наклонены под определенным углом относительно вертикали и которые вращаются вокруг общей вертикальной оси. Оптические оси каналов и их общая ось вращения лежат в одной плоскости референции. В каждом канале устанавливают поляризационные анализаторы, у которых оси полного пропускания поляризованной компоненты лежат в этой же плоскости референции. При вращении плоскости референции измеряют амплитуду сигнала от поляризованной компоненты регистрируемого излучения и фиксируют положение плоскости, при котором сигнал в обоих каналах равен нулю, а это значит, что источник находится в плоскости референции. В этот момент в каждом пункте наблюдения измеряют относительные азимуты источника между плоскостью вертикала источника и линией, соединяющей пункты. При дальнейшем вращении измеряют угол поворота плоскости референции относительно зафиксированного положения, при котором в одном из каналов сигнал становится максимальным. По измеренным значениям углов при известной базе между пунктами определяют эпицентральное расстояние источника, его высоту и зенитный угол, используя установленные соотношения. Траекторию объекта можно определить, фиксируя с течением времени изменение значений измеряемых параметров. 2 ил.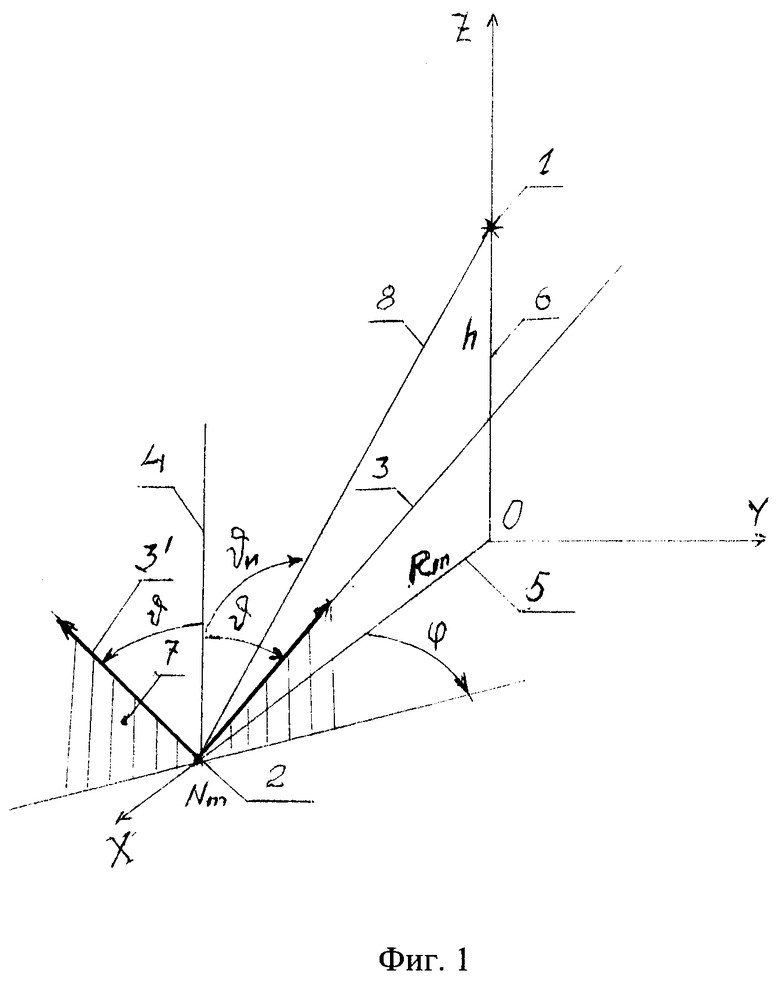
Способ определения местоположения сферического источника светового излучения наземным средством наблюдения, включающий регистрацию рассеянного земной атмосферой излучения от источника и измерение поляризационных характеристик регистрируемого излучения, отличающийся тем, что рассеянное излучение регистрируют не менее чем в двух пунктах наблюдения с базой b между ними, в каждом пункте устанавливают оптическое поляриметрическое устройство, содержащее два канала, оптические оси которых ориентированы под углом θ относительно зенита и которые вращаются вокруг общей вертикальной оси, причем оси полей зрения оптических каналов и ось вращения лежат в одной плоскости референции, а в пределах апертуры каждого канала устанавливают поляризационные анализаторы, у которых оси полного пропускания поляризованной компоненты излучения лежат в этой же плоскости референции, при вращении плоскости референции измеряют амплитуду оптического сигнала от поляризованной компоненты, фиксируют угол поворота плоскости референции, при котором этот сигнал в обоих каналах равен нулю, в этот момент измеряют азимуты источника относительно линии, соединяющей два пункта, в каждом пункте наблюдения измеряют угол поворота плоскости референции ϕm, который отсчитывают от фиксированного угла и при котором в одном из каналов сигнал от поляризованной компоненты достигает максимума, а эпицентральное расстояние Rm, высоту h и зенитный угол источника θи определяют по формулам:

где b - база между пунктами наблюдения; αm и αm+1 - относительные азимуты; ϕm - измеренный угол поворота плоскости референции; θ - заданный угол наклона поля зрения.
| Способ определения эпицентрального расстояния и высоты сферического источника ультрафиолетового излучения с помощью средств космического базирования | 2017 |
|
RU2672674C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2001 |
|
RU2179707C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ СЕЛЕКЦИИ ЭЛЕКТРОМАГНИТНЫХ ВОЛН С ПОСЛЕДУЮЩЕЙ ПОЛЯРИЗАЦИОННОЙ ОБРАБОТКОЙ СИГНАЛОВ | 2018 |
|
RU2720588C1 |
| СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ | 2009 |
|
RU2416108C1 |
| ПЕЛЕНГАТОР ОПТИЧЕСКОГО ДИАПАЗОНА | 2008 |
|
RU2357271C1 |
| US 5812267 A, 22.09.1998 | |||
| CN 106443584 A, 22.02.2017 | |||
| WO 2018184913 A1, 11.10.2018 | |||
| CN 106970361 A, 21.07.2017 | |||
| US 6407702 B1, 18.06.2002. | |||

