Изобретение относится к контрольно- измерительной технике и может быть использовано для определения линейных геометрических размеров контрастных объектов.
Известно устройство для бесконтактного контроля размеров деталей, включающее источник света, диафрагму, линзу, объектив, линейный многоэлементный датчик изображения, видеоусилитель, блок управления, блок определения середины штриха, блок усреднения измерений, блок вычисления размеров, индикатор. Недостатком данного устройства является низкая точность из-за дискретности многоэлементного фотоприемника.
Наиболее близким по технической сущности к заявляемому устройству является выбранное в качестве прототипа устройство для измерения линейных размеров, содержащее объектив, направляющий световой поток на объект, линейку фоточувствительных элементов, причем объектив расположен между измеряемым объектом и линейкой, вибровозбудитель, жестко связанный с линейкой, тактовый генератор, подключенный к выходу линейки, генератор низких частот, выход которого подключен к вибровозбудителю, счетчик, один выход которого подключен к выходному блоку, а другой - к генератору, индикатор, подключенный к счетчику. Измерение проводится в два этапа. Во время первого этапа при неподвижной линейке измеряется линейный размер объекта с точностью до элемента дискретизации линейки. Во время второго этапа линейка совершает продольные колебания и линейный размер уточняется.
Недостатком данного устройства является низкая надежность вследствие вибрации микросхемы фотоприемника.
Целью изобретения является повышение надежности устройства.
Указанная цель достигается тем, что устройство для измерения линейных размеров, состоящее из объектива, предназна(Л
С
V
О
э
ценного для направления светового потока на объект, линейки фоточувствительных элементов, тактового генератора, подсоединенного к управляющему входу линейки, выходного блока, подсоединенного к выхо- ду линейки, индикатора, дополнительно содержит расположенную между объективом и линейкой плоскопараллельную прозрачную пластину, установленную под углом к линейке и одним концом жестко соединен- ную с ней, а другим - с механизмом изменения угла наклона пластины, вычислительный блок и цифро-аналоговый преобразователь, вход механизма соединен с выходом циф- роаналогового преобразователя, вход последнего соединен с выходом вычислительного блока, вход вычислительного блока подсоединен к выходному блоку, а выход - к индикатору.
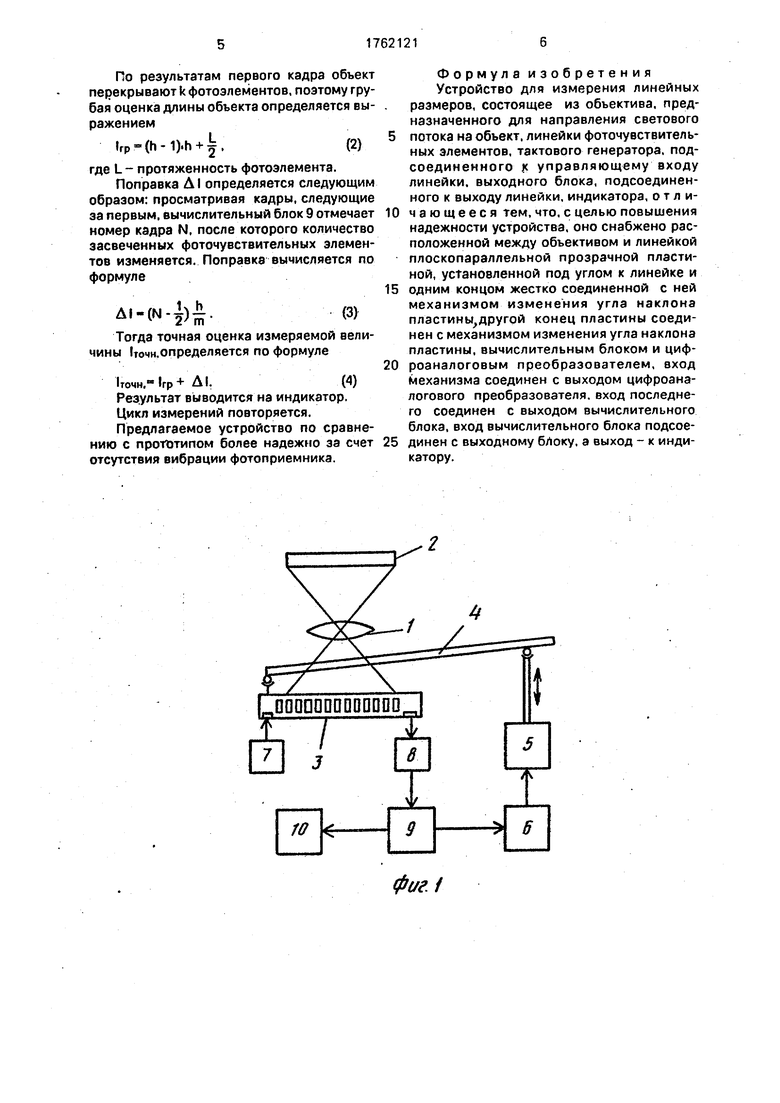
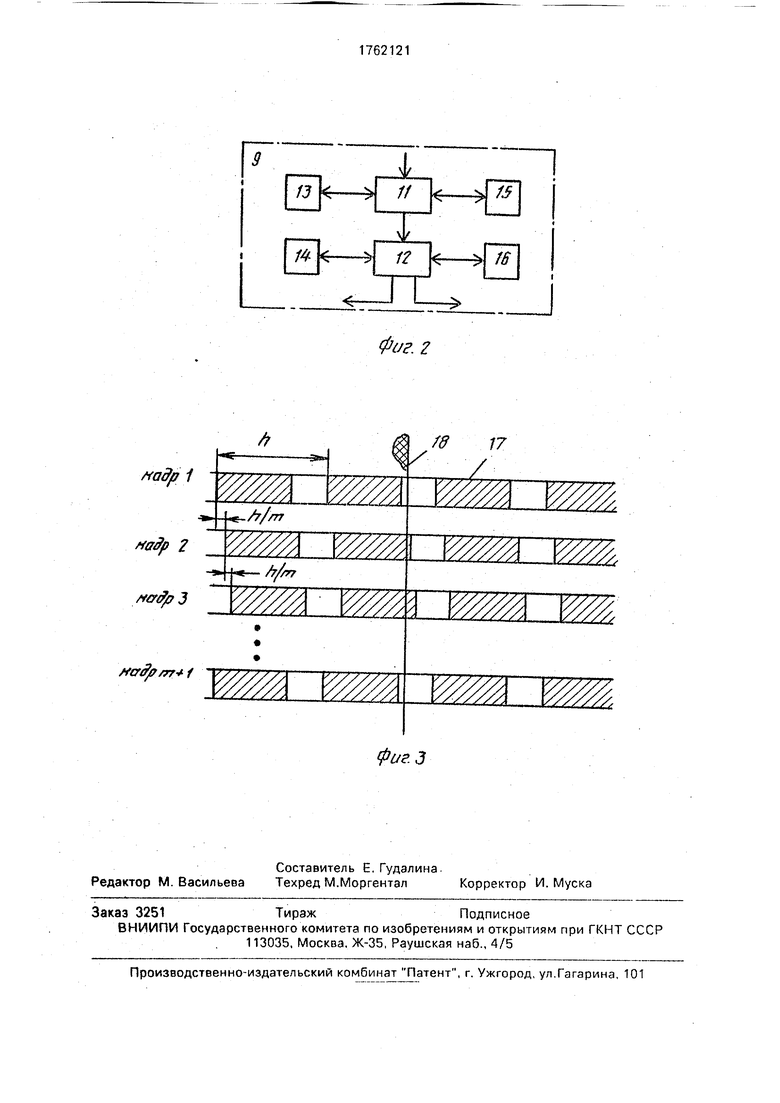
На фиг.1 представлена блок-схема уст- ройства для измерения линейных размеров; на фиг.2 - структура вычислительного блока; на фиг.З - временная диаграмма проведения измерения.
Устройство для измерения линейных размеров состоит из объектива 1, направляющего световой поток от объекта 2 на линейку 3 фоточувствительных элементов, причем между объективом 1 и под углом а к линейке 3 установлена плоскопараллельная пластина 4, одним концом жестко соединенная с ней, а другим - с механизмом изменения угла наклона пластины 5, вход которого соединен с цифроаналоговым преобразователем (ЦАП) 6, Тактовый генератор 7 соеди- нен с управляющим входом линейки 3, а выход линейки 3 соединен с выходным блоком 8. выход последнего соединен с входом вычислительного блока 9. выходы которого соединены с ЦАП 6 и индикатором 10.
Вычислительный блок 9 (фиг.2) состоит из последовательно соединенных процессора 11 для предварительной обработки в реальном масштабе времени и процессора . 12, выполняющего функции масштабирова- ния, управления, организации вывода на индикатор 10 и ЦАП 6. Процессоры 11, 12 соединены каждый соответственно с оперативными запоминающими устройствами (ОЗУ) 13, 14 для хранения промежуточных результатов и постоянными запоминающими устройствами (ПЗУ) 15, 16 для хранения программ, констант и таблиц.
Процессоры 11,12 могут быть выполнены на однокристальной микро-ЭВМ к 1816 ВЕ35.
Оперативно-запоминающие устройства 13, 14 могут быть выполнены на микросхемах типа К 537 РУ10, постоянно-запоминающие устройства 15, 16 - на микросхемах типа К 556 РФ5.
В качестве индикатора 10 может быть использован семисегментный индикатор на АЛС ЗЗЗБ. Тактовый генератор 7 может быть реализован на микросхеме типа К155 ЛАЗ, а выходной блок (компаратор) 8 - на микросхеме типа К 544 УД26.
Механизм угла наклона пластины может быть выполнен на основе пьезоэлемен- та.
Устройство работает следующим образом.
Изображение измеряемого объекта 2 (фиг. 1) проецируется на линейку 3 и охватывает определенное число фоточувствительных элементов. В исходном состоянии плоскопараллельная пластина 4 имеет угол наклона а, равный нулю. В соответствии с формулой плоскопараллельной пластины
Ap-a-slng-(1- la) , О) r - sirra
где Ду - величина сдвига изображения;
d - толщина плоскопараллельной пластины;
п - показатель преломления пластины, изменение угла наклона приводит к перемещению границы измеряемого объекта (фиг.З).
При помощи импульсов с тактового генератора 7 происходит сканирование с линейки 3 через выходной блок 8 в вычислительный блок 9. Здесь полученное изображение запоминается и выдается команда в ЦАП 6 изменить при помощи механизма угол наклона так, чтобы изображение сдвинулось (сместилось) на определенную величину.
Точность измерения определяется дискретностью линейки фоточувствительных элементов. Пусть необходимо повысить дискретность фотоприемника в m раз. Для этого будем сдвигать изображение вдоль
линейки m раз на величину , где h шаг линейки.
Процесс считывания изображения повторяется до тех пор, пока сдвиг изображения относительно исходного положения не достигнет величины h (фиг.З). Затем вычислительный блок 9 определяет границу объекта, анализируя собранную информацию. Этот анализ проводится следующим образом: выходной блок 8 настроен так, что освещении более половины фотоэлемента выдается логическая 1, в противном случае 0й. Результат измерения будет выглядеть подобно изображенному на фиг.З.
По результатам первого кадра объект перекрывают k фотоэлементов, поэтому грубая оценка длины объекта определяется выражением
lrP-(h-1).h + |,(2)
где L- протяженность фотоэлемента.
Поправка Д) определяется следующим образом: просматривая кадры, следующие за первым, вычислительный блок 9 отмечает номер кадра N, после которого количество засвеченных фоточувствительных элементов изменяется. Поправка вычисляется по формуле
Д1-(М-{)
Ј m
(3
Тогда точная оценка измеряемой величины 1Точн.определяется по формуле
точн.
1Ф+ Д1.
(4)
Результат выводится на индикатор.
Цикл измерений повторяется.
Предлагаемое устройство по сравнению с прототипом более надежно за счет отсутствия вибрации фотоприемника.
Формула изобретения Устройство для измерения линейных размеров, состоящее из объектива, предназначенного для направления светового
5 потока на объект, линейки фоточувствительных элементов, тактового генератора, подсоединенного к управляющему входу линейки, выходного блока, подсоединенного к выходу линейки, индикатора, о т л и0 чающееся тем, что, с целью повышения надежности устройства, оно снабжено расположенной между объективом и линейкой плоскопараллельной прозрачной пластиной, установленной под углом к линейке и
5 одним концом жестко соединенной с ней механизмом изменения угла наклона пластины другой конец пластины соединен с механизмом изменения угла наклона пластины, вычислительным блоком и циф0 роаналоговым преобразователем, вход механизма соединен с выходом цифроана- логового преобразователя, вход последнего соединен с выходом вычислительного блока, вход вычислительного блока подсое5 динен с выходному блоку, а выход - к индикатору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейных размеров | 1987 |
|
SU1439401A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2006 |
|
RU2319990C1 |
| Способ получения оптических изображений объектов, наблюдаемых при больших угловых скоростях, и устройство для его реализации | 2017 |
|
RU2653087C1 |
| Способ контроля передаточной функции оптической системы и устройство для его осуществления | 1985 |
|
SU1318821A1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Способ измерения расстояния между отражающими поверхностями объекта | 1989 |
|
SU1793215A1 |
| Устройство для нанесения лаковых покрытий | 1989 |
|
SU1717259A1 |
| Способ измерения геометрических размеров прозрачных труб | 1989 |
|
SU1753269A1 |
Изобретение относится к контрольно- измерительной технике. Цель изобретения - повышение надежности устройства. Устройство содержит объектив 1, направляющий световой поток от объекта 2 на линейку фоточувствительных элементов, причем между объективом и под углом к линейке установлена плоскопараллельная пластина 4, одним концом жестко соединенная с ней, а другим - с механизмом 5 изменения угла наклона пластины. Для повышения дискретности измерений сканируют изображением светового пятна по линейке Зт раз на величину Дуз h/m, где h - шаглинейки. 3 ил.
.DaoaODDDDDDDOj
/
в
в
фиг.1
надр 1
tfafy 2 #&фЗ
#сп р/тг+ f
Фаг. 2
фиг.З
| Приборы и системы управления, 1984, № 1,с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| Устройство для измерения линейных размеров | 1987 |
|
SU1439401A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
