Изобретение относится к приборостроению, технике оптических систем обзора пространства и поиска препятствий и может быть применено, в частности, в технике оптической локации, системах построения 3D-изображений.
В настоящее время существует несколько наиболее характерных способов получения изображения объектов и устройств для их реализации, основанных на подсветке объекта лазерным излучением.
По способам развертки и соотношению диаграмм направленности источника и приемника различают три варианта построения систем видения и измерения дальности [В.Е. Карасик, В.М. Орлов. Лазерные системы видения. М.: МГТУ им. Н.Э. Баумана, 2001, с.46-53].
В первом варианте объект сканируют зондирующим лазерным излучением с узкой диаграммой направленности, а регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, осуществляют посредством приемника с широкой диаграммой направленности.
При реализации второго способа сканирование отсутствует, объект освещают зондирующим лазерным излучением с широкой диаграммой направленности, а регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, посредством приемника с узкой диаграммой направленности.
Реализация третьего способа (Патент RU №2084925, приоритет 14.04.1995 г., МПК: G01S 17/06) отличается от реализации первых двух тем, что объект сканируют зондирующим лазерным излучением с узкой диаграммой направленности, а регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, осуществляют посредством приемника с узкой диаграммой направленности, которую перемещают синхронно с лазерным пучком подсветки. Этот способ и аппаратура, его реализующая, имеют наибольшее отношение сигнал/шум при одинаковых исходных данных и имеет наибольшую помехоустойчивость от внешних факторов.
В качестве строчных сканирующих устройств в оптико-локационной аппаратуре в настоящее время наибольшее распространение получили вращаемые зеркальные многогранники - призмы и пирамиды, позволяющие достигать достаточно больших углов сканирования при большой частоте следования развертки во времени и формирования качественного распределения энергии. Для кадровой развертки широко используется вращаемое зеркало, угол отклонения которого задается электромеханическим приводом, реализованным, например, на шаговом двигателе.
На таких механических сканерах реализован волоконно-оптический локатор, описанный в статье "Hellas: Obstacle warning system for helicop-ters" K.R. SchuIz, S. Scherbarth, U. Fabry (Laser Radar Technology and Applications VII, Gary W. Kamerman, Editor, Proceedings of SPIE Vol.4723 (2002) 2002 SPIE-0277-786/X/02), а также волоконно-оптический сканер, описанный в (Пат. RU №2302025, приоритет 06.12.2005 г., МПК: G02B 26/10, G02B 26/08).
Волоконно-оптический сканер состоит из строчного сканирующего устройства, выполненного в виде двух наклонных в противоположные стороны зеркал, которые закреплены на шпинделе двигателя и синхронно вращаются. По обе стороны от наклонных зеркал на одной оптической оси расположены объективы передающего и приемного каналов, которые оптически сопряжены с торцами волоконно-оптических жгутов, вмонтированных по окружности в неподвижные коллекторы. Вторые торцы жгутов соединены в две двухрядные линейки, и они обращены в область сканирования. В центры коллекторов вмонтированы световоды. Один центральный световод передающего канала связан с лазерным излучателем, а второй центральный световод приемного канала связан с приемником излучения.
Но данная конструкция имеет аберрационные искажения (астигматизм, кома) при изменении направления излучения через объективы под углом к оптической оси, что приводит к виньетированию излучения и, следовательно, к потерям энергии излучения как на выходном, так и входном каналах устройства, и требуется высокая точность изготовления коллекторов как по шагу расположения оптических волокон, так и по диаметру их расположения для обеспечения согласования входных и выходных каналов коллекторов. Вне зависимости от степени точности изготовления зеркал, им присущи некоторые ошибки сборки, в частности отклонения от заданных углов между зеркальными гранями и осью вращения многогранника. Все это ведет к необходимости увеличения размеров граней многогранника или увеличения апертуры формирующей оптики, и то, и другое приводит к увеличению габаритов сканирующего устройства, а необходимость большой скорости сканирования требует увеличения скорости вращения зеркального многоугольника, что при больших габаритах зеркального многогранника технически невыполнимо. Также при повороте зеркальной поверхности происходит линейное геометрическое смещение луча в пространстве, что приводит к неравномерности скорости сканирования и снижению точности позиционирования луча в области сканируемого пространства.
Большим недостатком лазерных локаторов с механическим сканированием угловых диаграмм направленности передающего и приемного каналов является ограниченная информативность и значительные габаритно-весовые характеристики. Скорость строчного сканирования определяется возможностями механических сканеров (двигателей) и изменить ее (увеличить или уменьшить) при изменении условий применения, например, при изменении погодных условий - ухудшении видимости, практически невозможно. Увеличить скорость сканирования, чтобы увеличить частоту обновления кадров и повысить число элементов в строке изображения, также практически невозможно. Надежность механических сканеров, особенно в широком температурном диапазоне использования (в ряде случаев лазерный локатор находится снаружи устройства) является недостаточной.
Техническим результатом предлагаемого изобретения является повышение информативности лазерного локатора, уменьшение габаритно-весовых характеристик, а также повышение надежности.
Технический результат в предлагаемом изобретении достигается тем, что в систему импульсной лазерной локации, содержащую импульсный лазер, однокоординатное сканирующее устройство, включающее последовательно соединенные с лазером акустооптический дефлектор и выходную оптическую систему передающего канала, оптический объектив фотоприемного устройства, однокоординатное сканирующее устройство по второй координате, ортогональной первой координате, фотоприемное устройство, вычислительное устройство, а также блок управления акустооптическим дефлектором, вход управления которого подключен к выходу управления дефлектором вычислительного устройства, а выход подключен к входу управления дефлектора, причем вход синхронизации лазера подключен к выходу синхронизации вычислительного устройства, введены призменный светоделитель, измерительный канал, массив фотоприемных устройств, включающий К фотоприемников, выходы которых подключены к измерительным входам дальности вычислительного устройства, а также К волоконно-оптических жгутов, содержащих М волокон, которые с одной стороны смонтированы вместе и обращены торцами к соответствующим фотоприемникам, а с другой стороны волокна каждого жгута смонтированы в однорядные линейки, которые суммарно образуют однорядную линейку из МК волокон, торцы которой обращены к выходу оптического объектива фотоприемного устройства и расположены в его фокальной плоскости, призменный светоделитель размещен между выходом акустооптического дефлектора и входом выходной оптической системы передающего канала, причем оптический вход измерительного канала соединен со вторым выходом призменного светоделителя, а выход соединен с входом компенсации угловых ошибок вычислительного устройства.
Введение массива фотоприемных устройств, включающего К фотоприемников, а также К волоконно-оптических жгутов, содержащих М волокон, которые с одной стороны смонтированы вместе и обращены торцами к соответствующим фотоприемникам, а с другой стороны волокна каждого жгута смонтированы в однорядные линейки, которые суммарно образуют однорядную линейку из МК волокон, торцы которой обращены к выходу оптического объектива фотоприемного устройства, что позволило уменьшить габаритно-весовые характеристики, повысить надежность за счет устранения оптико-механического строчного сканера, а также снять ограничения на скорость строчного сканирования и соответственно повысить информативность лазерного локатора.
Введение призменного светоделителя, размещеного между выходом акустооптического дефлектора и входом выходной оптической системы передающего канала, и измерительного канала, оптический вход которого соединен со вторым выходом призменного светоделителя, а выход соединен с входом компенсации угловых ошибок вычислительного устройства позволило повысить надежность локатора при работе в диапазоне температур за счет стабилизации углового положения сканирующего лазерного пучка.
Заявителем и авторами не обнаружено в патентной и научно-технической литературе систем импульсной лазерной локации, выполненных подобным образом.
На фиг.1 приведена структурная схема системы импульсной лазерной локации.
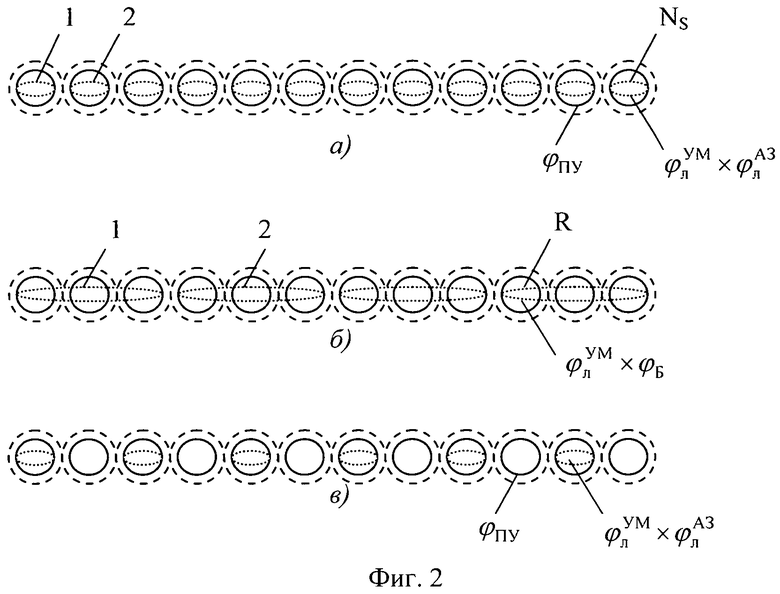
На фиг.2 для одной строки условно представлены варианты положения лазерных пучков и полей зрения для каждого волокна в картинной плоскости исследуемого пространства для случая дискретного изменения частоты управления дефлектором (фиг.2а), для случая ЛЧМ сигнала управления дефлектором (фиг.2б) и для случая облучения лазерным пучком полей зрения волокон с пропуском облучения для соседнего волокна (фиг.2в).
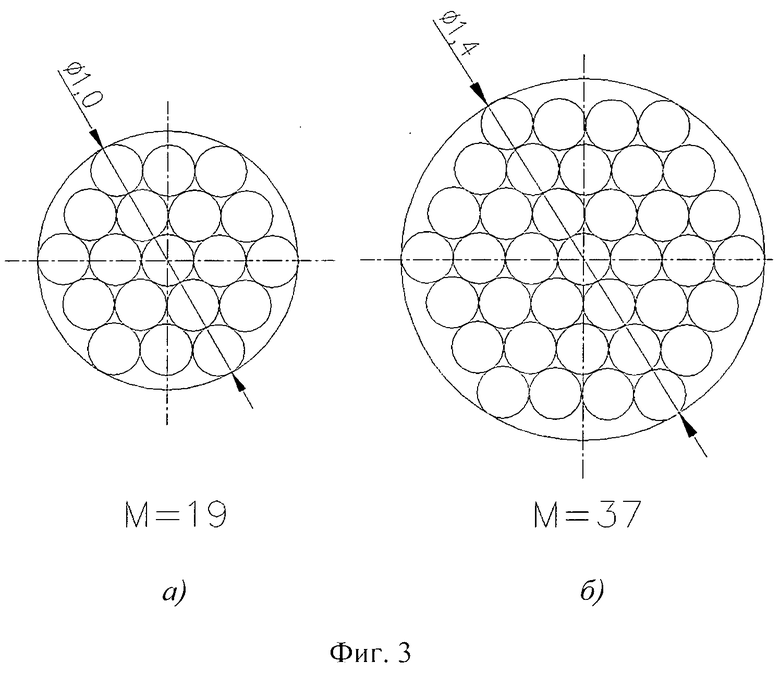
На фиг.3 приведен вид торца волоконно-оптических жгутов, содержащих М=19 волокон (фиг.2а) и содержащих М=37 волокон (фиг.2б), которые с этой стороны смонтированы вместе и обращены торцами к соответствующему фотоприемнику.
Система импульсной лазерной локации (фиг.1) содержит импульсный лазер 1, однокоординатное сканирующее устройство 2, акустооптический дефлектор 3, призменный светоделитель 4, выходную оптическую систему передающего канала 5, блок управления акустооптическим дефлектором 6, измерительный канал 7, оптический объектив фотоприемного устройства 8, волоконно-оптические жгуты 91-9К, массив фотоприемных устройств 101-10К, вычислительное устройство 11 и однокоординатное сканирующее устройство 12. Жгуты 91-9К содержат КМ волокон 131-13КМ.
Выход лазера 1 через акустооптический дефлектор 3 и первый оптический выход призменного светоделителя 4 соединен с входом выходной оптической системы передающего канала 5. Второй оптический выход призменного светоделителя 4 соединен с входом измерительного канала 7. Выход измерительного канала 7 соединен с входом компенсации угловых ошибок вычислительного устройства 11. Выход блока управления дефлектором 6 соединен с входом управления акустооптического дефлектора 3. Вход блока управления дефлектором 6 соединен с выходом управления дефлектором вычислительного устройства 11. Вход синхронизации лазера 1 подключен к выходу синхронизации вычислительного устройства 11.
Выход оптического объектива фотоприемного устройства 8 через волоконно-оптические жгуты 91-9К соединен с массивом фотоприемных устройств 101-10К. Выходы фотоприемных устройств 101-10К соединены с измерительными входами дальности вычислительного устройства 11.
Входы/выходы управления сканером вычислительного устройства 11 соединены с соответствующими входами/выходами однокоординатного сканирующего устройство 12.
Работа системы импульсной лазерной локации происходит следующим образом. Вычислительное устройство 11 формирует коды положения лазерного пучка по строке, которые поступают на вход блока управления дефлектором 6, и, с временной задержкой τ, которая зависит от инерционности акустооптического дефлектора, синхроимпульсы, подаваемые на вход синхронизации лазера 1. Блок управления дефлектором 6, являющийся синтезатором частот, формирует высокочастотный сигнал fС, частота которого пропорциональна величине поступившего кода положения лазерного пучка по строке. Высокочастотный сигнал fС, поданный на акустооптический дефлектор 3, возбуждает в дефлекторе акустические волны, на которых происходит дифракции падающего на дефлектор лазерного пучка.
Синхроимпульс, поданный на вход синхронизации лазера 1, вызывает генерацию короткого лазерного импульса, который, проходя акустооптический дефлектор 3, отклоняется на угол, величина которого пропорциональна величине высокочастотного сигнала fС. Далее отклоненный (дифрагированный) лазерный пучок проходит выходную оптическую систему передающего канала 5 и увеличивает угол отклонения пропорционально угловому увеличению выходной оптической системы передающего канала 5. Далее лазерный пучок отражается от зеркала однокоординатного сканирующего устройства 12 и излучается в пространство обзора.
Часть лазерного пучка, отклоненного дефлектором 3, отводится призменным светоделителем на второй выход и далее он поступает в измерительный канал 7. В измерительном канале 7 определяется текущее угловое положение отклоненного лазерного пучка при заданном (опорном) коде положения. Вычисляется величина углового отклонения текущего углового положения отклоненного лазерного пучка от ожидаемого углового положения для заданного кода положения и эта величина поступает в вычислительное устройство 11 для коррекции кодов положения с целью компенсации угловой ошибки сканирования, обусловленной влияниями температуры окружающей среды.
Коды положения, которые формирует вычислительное устройство 11, последовательно изменяются от наименьшего до наибольшего значения с заданной дискретностью, определяя тем самым диапазон изменения величин высокочастотного сигнала и, следовательно, угловой диапазон сканирования лазерного пучка по строке. Диапазон изменения величин высокочастотного сигнала fС равен величине Δf=fmax-fmin, где fmax и fmin - наибольшая и наименьшая частоты управления дефлектором 3. Крайние угловые азимутальные положения дифрагированного лазерного пучка представлены на фиг.1. Они соответствуют частотам fmax и fmin. При последовательном дискретном изменении частоты управления дефлектором 3 в этом диапазоне дифрагированный лазерный пучок в пространстве образует горизонтальную строку, содержащую NS точек, где ND - число кодов положения в последовательности кодов строки. Дискрет изменения частоты ΔFМ управления дефлектором 3 при переключении соседних точек в этом случае равен величине ΔFМ=Δf/NS. Положение этой горизонтальной лазерной строки по углу места определяется угловым положением зеркала однокоординатного сканирующего устройства 12. По углу места (в кадре) за счет отклонения сканирующего устройства 12 может быть сформировано NК дискретных положений лазерных строк.
Объектив фотоприемного устройства 8, волокна 131-13КМ, волоконно-оптических жгутов 91-9К и массив фотоприемных устройств 101-10К имеют мгновенное поле зрения для каждого фотоприемного устройства 101-10К, сопряженное с угловым положением лазерного пучка, вышедшего из однокоординатного сканирующего устройства 2 в требуемом направлении по первой координате, как представлено на фиг.2а. Таким образом, для каждого кода положения лазерного импульса в строке известен номер волокна из набора волоконно-оптических жгутов 91-9К, на который должен быть сфокусирован отраженный от удаленного объекта лазерный импульс, а также известен номер фотоприемного устройства из массива фотоприемных устройств 101-10К, на который придет отраженный сигнал.
Отраженный от удаленного объекта лазерный импульс принимается объективом фотоприемного устройства 8 и, в зависимости от угла прихода, фокусируется им на одно из волокон волоконно-оптических жгутов 91-9К. Принятый лазерный поток по волокну направляется на одно фотоприемное устройство из массива фотоприемных устройств 101-10К и преобразуется в электрический импульс, задержанный на время τЗ=2L/c относительно времени излучения, где L - дальность до удаленного объекта, с - скорость света.
Вычислительное устройство 11 измеряет величину временной задержки принятого лазерного импульса относительно синхроимпуса (или, как вариант, относительно излученного лазером светового импульса) и вычисляет текущую дальность по данному направлению до отражающей поверхности. Выходными данными вычислительного устройства 11 являются текущий код направления по строке (азимут), текущий код направления по кадру (угол места, снимаемый с датчика углового положения зеркала) и дальность. Текущий набор этих данных за один кадр позволяет построить трехмерное изображение исследуемого пространства.
На фиг.2 для одной строки условно представлены варианты положения лазерных пучков и полей зрения для каждого волокна из набора волоконно-оптических жгутов 91-9К, на который должен быть сфокусирован отраженный от удаленного объекта лазерный импульс, в картинной плоскости исследуемого пространства. На фиг.2а в строке уложено М×К=NS лазерных пучков, имеющих угловую расходимость 
Современные конструкции акустооптических дефлекторов за счет закоса входных и выходных граней реализованы таким образом, что падающий лазерный пучок и дифрагированный на центральной рабочей частоте f0 лазерный пучок соосны. Центру угла сканирования соответствует частота управления дефлектора f0=(fmax+fmin)/2. Диапазон частот управления дефлекторов Δf=fmax-fmin определяет угловой размер растра 
При линейном изменении частот управления дефлектором (сигнал с линейной частотной модуляцией - ЛЧМ сигнал) происходит угловое уширение дифрагированного лазерного пучка вдоль направления сканирования (Бондаренко Д.А., Карасик В.Е., Семенков В.П. Исследование режима дифракции лазерного пучка на линейно частотно-модулированной акустической волне в анизотропном акустооптическом дефлекторе//Вестник МГТУ им. Н.Э. Баумана. Спец. выпуск «Современные проблемы оптотехники». 2011. С.31-41). Если за время τ перед подачей синхроимпульса, вызывающего появление лазерного импульса, на дефлектор 3 подать ЛЧМ сигнал с девиацией частоты ΔFБ, то дифрагированный лазерный пучок будет иметь угловой размер 
Для повышения частоты обновления кадров возможно формировать строчную развертку не только за счет последовательной засветки соседних мгновенных полей формирующего приемного устройства, а пропуская одну, две или несколько позиций засветки, как представлено на фиг.2в. Для ряда приложений все вышеописанные варианты формирования строчной развертки могут быть применены для оптимизации получаемого изображения картинной плоскости.
Лазер 1, работающий в импульсном режиме, может быть реализован на активном элементе из граната с неодимом и накачкой полупроводниковыми лазерными диодами. Внутри резонатора может быть установлен акустооптический модулятор, например, серийно выпускаемый МЗ-321М, имеющий частоту сигнала управления 80 МГц. Вариант выполнения такого лазера изложен в книге (В.В. Безотосный и др. Высокоэффективный компактный Nd3+:YAG - лазер на длине волны 1,064 мкм, работающий в непрерывном и импульсном режимах, с диодной накачкой и модуляцией добротности акустооптическим затвором. Квантовая электроника, т.35, №6 (2005), 507-510). Такой лазер обеспечивает на выходе дифракционную расходимость лазерного излучения, а в импульсном режиме частота повторения импульсов достигает 200 кГц. При выходной апертуре лазера 4,5 мм угловая расходимость лазерного излучения составит величину около 0,3 мрад.
При построении системы импульсной лазерной локации с другими длинами волн в качестве лазера может быть использован лазер на активном элементе из граната с неодимом и накачкой полупроводниковыми лазерными диодами и внутрирезонаторным нелинейным преобразованием излучения во вторую гармонику (λ=0,53 мкм) или с параметрическим внутрирезонаторным преобразованием в безопасную для глаз длину волны (λ=1,57 мкм). Возможно использование волоконных лазеров с безопасной для глаз длиной волны λ=1,54 мкм.
В качестве дефлектора 3 системы импульсной лазерной локации могут быть использованы акустооптические дефлекторы со светозвукопроводом из парателлурита (ТеO2). Такие дефлекторы могут сканировать лазерное излучение в видимой области (например, 0,53 мкм) и ближней ИК-области спектра (например, 1,064 мкм), в том числе в безопасной для зрения спектральной области ~1,5 мкм. При реализации конструкции дефлектора с углом Брюстера (Патент RU №2462739, приоритет 08.07.2011 г., МПК: G02F 1/33) для лазерного излучения с длиной волны 1,064 мкм и диапазона частот управления дефлектора λf=32 МГц можно реализовать полный угол сканирования 6,6 градуса. Центральная рабочая частота f0 равна при этом 80 МГц. Для световой апертуры дефлектора 9 мм постоянная времени дефлектора τ~14 мкс, а число разрешимых состояний дефлектора по критерию Релея равно Nd~450. Диаметр лазерного пучка на входе такого дефлектора составляет величину около 4,5 мм.
При использовании дефлектора 3 с вышеприведенными параметрами и выходной оптической системы передающего канала 5, имеющей увеличение 5, на выходе системы импульсной лазерной локации обеспечивается сканирование лазерного пучка в пределах 33 градуса. Выходную оптическую систему передающего канала 5 целесообразно реализовать цилиндрической. Угловая расходимость лазерного излучения на выходе системы импульсной лазерной локации составит в этом случае величину около 0,3 мрад×1,5 мрад, причем большая угловая расходимость лазерного пучка соответствует направлению сканирования лазерного пучка (фиг.2а).
Блок управления дефлектором 6 может быть реализован на стандартной микросхеме синтезатора частот, например, AD9954YSVB, имеющей встроенную схему быстрого сканирования по частоте, выход которой подключен к широкополосному усилителю мощности, реализованному, например, на стандартной микросхеме RA07H0608V. При использовании лазера с длиной волны 1,064 мкм выходная мощность высокочастотного сигнала блока управления дефлектором 6 в диапазоне частот управления дефлектором Δf=fmax-fmin=96 МГц…64 МГц=32 МГц должна составлять около 5 Вт. Современные синтезаторы частот имеют двухбайтный код установки частоты, что позволяет очень точно позиционировать угловое положение лазерного пучка при сканировании. Например, задав диапазон кода положения лазерного пучка по строке, равным 8192±4096, чтобы обеспечить вышеуказанный диапазон частот управления дефлектором 80±16 МГц, реально получить 8192 угловых дискрета позиционирования лазерного пучка по строке.
В измерительном канале 7 определяется текущее угловое положение отклоненного лазерного пучка при определенном коде положения, например, равном 8192, соответствующему центральной частоте диапазона частот управления дефлектором f0=80 МГц. Дифрагированный лазерный пучок частично отражается призменным светоделителем 4 на второй выход и далее поступает в измерительный канал 7. Измерительный канал представляет собой длиннофокусный объектив, в фокальной плоскости которого находится фотоприемное устройство, например ПЗС-линейка, содержащая 256 элементов. На ПЗС-линейке строится изображение лазерного пучка. Фокус объектива и размеры ПЗС-линейки выбираются таким образом, чтобы изображение лазерного пучка накрывало два-три десятка элементов линейки и в нормальных условиях находилось примерно в центре линейки. Центр лазерного пучка определяется как среднее значение номеров освещенных элементов линейки. При изменении температуры окружающей среды положение изображения лазерного пучка на элементах ПЗС-линейки будет изменяться из-за изменения угла дифракции лазерного пучка в дефлекторе и, вычисляя в вычислительном устройстве 11 новое среднее значение номеров освещенных элементов линейки, нетрудно определить величину компенсации температурных уходов дефлектора. Такая операция занимает по времени доли мс и может выполняться как перед началом работы системы импульсной лазерной локации, так и в процессе работы.
Конструкция объектива фотоприемного устройства 8 может быть аналогичной известным волоконно-оптическим локаторам.
Волокна волоконно-оптических жгутов 91-9К (фиг.1) с одной стороны, обращенной к фотоприемному устройству, уложены в круг. Пример укладки для 19 и 37 волокон показан на фиг.3а и на фиг.3б соответственно. Диаметр укладки волокон dВ для вышеуказанных случаев равен 5dВ и 7dВ, где dВ - внешний диаметр волокна. Волокна волоконно-оптических жгутов 91-9К с другой стороны, обращенной к объективу фотоприемного устройства 8, уложены в линейку, как представлено на фиг.1: в начале линейки уложены первые волокна всех жгутов, далее вторые волокна всех жгутов и т.д. Волоконно-оптические жгуты 91-9К могут быть выполнены из оптических волокон, например, с внешним диаметром dВ=200 мкм и диаметром центральной светопроводящей части dС=160 мкм. Диаметр укладки волокон db для вышеуказанных случаев равен 1,0 мм и 1,4 мм.
В качестве фотоприемных устройств могут использоваться как набор одиночных лавинных фотодиодов, так и линейка лавинных фотодиодов, геометрические размеры фоточувствительных площадок которых обеспечат прием лазерного излучения с выхода волоконно-оптического жгута. Диаметр фоточувствительных площадок DФ лавинных фотодиодов должен превышать диаметр укладки волокон dВ на 10-40 процентов и для вышеуказанных случаев можно использовать лавинные фотодиоды с диаметром площадок 1,5 мм и 2,0 мм. При введении специальной оптической системы для фокусировки лазерного излучения с выхода волоконно-оптического жгута диаметр площадок может быть уменьшен.
Число К используемых фотоприемных устройств в локаторах с большим угловым полем зрения целесообразно выбрать равным 8 или 10 шт. В зависимости от решаемой задачи число их может быть и иным.
При К=8, числе волокон в жгуте М=37 и внешнем диаметре волокон 200 мкм линейные размеры dF волокон, обращенных к объективу фотоприемного устройства 8 и уложенных в линейку, равны dF=59,2 мм. Число волокон и, следовательно, число угловых разрешимых элементов в строке равно при этом NS=296.
При угловом поле зрения системы импульсной лазерной локации по строке, равноым 2φF, фокусное расстояние FПУ объектива фотоприемного устройства 8 должно быть равным 
Вычислительное устройство 11 может быть реализовано, например, на управляющем микроконтроллере STM 32F407, имеющем высокую тактовую частоту, значительное количество периферийных блоков - ЦАП и АЦП, внешние интерфейсы различных типов, а также большие ОЗУ и ПЗУ.
Однокоординатное сканирующее устройство по второй координате 12, как и в известных волоконно-оптических сканерах, может быть реализовано на основе сканирующего зеркала с шаговым двигателем и датчиком углового положения зеркала.
Сравним предложенную систему импульсной лазерной локации и известные волоконно-оптические сканеры.
В известных волоконно-оптических сканерах формирующее устройство для образования потока импульсного лазерного излучения в требуемом направлении по первой координате (объектив передатчика) практически соответствует формирующему приемному устройству, обеспечивающему передачу отраженного от объекта импульсного лазерного излучения к фотоприемному устройству (объективу приемника), так как они оптически согласованы с оптическими волокнами, по которым передается и принимается лазерное излучение. Эти объективы имеют достаточно большие веса и габариты. Световая апертура такого объектива не менее 50 мм. В предлагаемой системе присутствует лишь один объектив (приемный). Передающая часть оснащена малогабаритной оптической системой с апертурой 10-15 мм, что уменьшает габаритно - весовые характеристики.
Выполнение скоростного сканирующего строчного устройства на основе акустооптического дефлектора повысило надежность системы за счет устранения механического сканера, имеющего зависимость параметров в широком температурном диапазоне использования. В частности, замерзание смазки сканера при низких температурах сложно устранить электронным способом.
В известных волоконно-оптических сканерах частота обновления информации составляет не более 3 Гц и изменить ее практически невозможно. Она определяется частотой повторения лазера, которая в аналогах равна 60 кГц, числом волокон в строчном сканирующем устройстве, равном 100-120, и числом строк при выполнении каровой развертки однокоординатным сканирующим устройством. Число строк в кадре при этом примерно равно 200.
В предложенной системе импульсной лазерной локации акустооптический дефлектор позволяет изменять угловую расходимость лазерного излучения по направлению сканирования при использовании линейно частотно-модулированного сигнала управления дефлектором. При этом возможно одновременно принимать отраженные лазерные импульсы с нескольких мгновенных полей зрения. В предложенном примере реализации это дает повышение частоты обновления информации до 8 раз или, при меньшей частоте обновления информации, позволяет повысить информативность кадра за счет повышения разрешения по строкам.
Отметим также, что акустооптический дефлектор позволяет формировать лазерную строку не только за счет последовательной засветки соседних мгновенных полей формирующего приемного устройства, а иным способом, например, пропуская одну или две позиции соседней засветки в строке, формируя разную структуру соседних строк, но повышая при этом частоту обновления кадров, т.е. информативность системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЛАЗЕРНОГО РАСТРА | 2013 |
|
RU2532504C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2011 |
|
RU2477866C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2000 |
|
RU2177208C1 |
| АКУСТООПТИЧЕСКИЙ АНИЗОТРОПНЫЙ ДЕФЛЕКТОР | 2011 |
|
RU2462739C1 |
| ЛАЗЕРНАЯ СИСТЕМА НАБЛЮДЕНИЯ | 2021 |
|
RU2780708C1 |
Изобретение относится к области оптической локации и касается системы импульсной лазерной локации. Система содержит импульсный лазер, два однокоординатных сканирующих устройства, акустооптический дефлектор, выходную оптическую систему, вычислительное устройство, блок управления акустооптическим дефлектором, призменный светоделитель, измерительный канал, массив фотоприемных устройств, объектив массива фотоприемных устройств и волоконно-оптические жгуты. Волоконно-оптические жгуты с одной стороны смонтированы вместе и обращены торцами к фотоприемным устройствам, а с другой стороны волокна каждого жгута смонтированы в однорядные линейки, которые суммарно образуют однорядную линейку из волокон, торцы которой расположены в фокальной плоскости объектива фотоприемного устройства. Призменный светоделитель размещен между выходом акустооптического дефлектора и входом выходной оптической системы. Оптический вход измерительного канала соединен с выходом призменного светоделителя, а выход соединен с входом компенсации угловых ошибок вычислительного устройства. Технический результат заключается в уменьшении габаритно-весовых характеристик, повышении надежности и информативности лазерного локатора. 3 ил.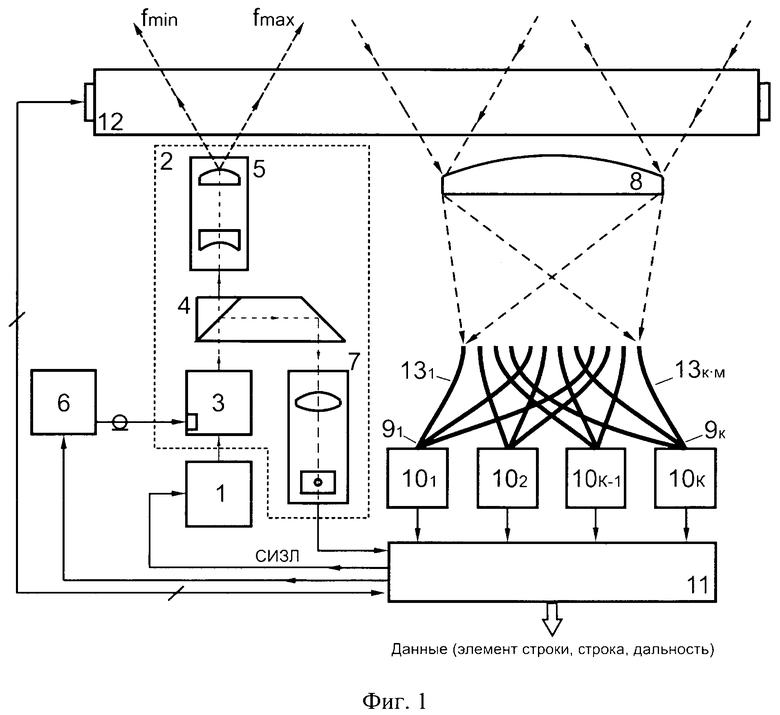
Система импульсной лазерной локации, содержащая импульсный лазер, однокоординатное сканирующее устройство, включающее последовательно соединенные с лазером акустооптический дефлектор и выходную оптическую систему передающего канала, оптический объектив фотоприемного устройства, однокоординатное сканирующее устройство по второй координате, ортогональной первой координате, фотоприемное устройство, вычислительное устройство, а также блок управления акустооптическим дефлектором, вход управления которого подключен к выходу управления дефлектором вычислительного устройства, а выход подключен к входу управления дефлектора, причем вход синхронизации лазера подключен к выходу синхронизации вычислительного устройства, отличающаяся тем, в нее введен призменный светоделитель, измерительный канал, массив фотоприемных устройств, включающий К фотоприемников, выходы которых подключены к измерительным входам дальности вычислительного устройства, а также К волоконно-оптических жгутов, содержащих М волокон, которые с одной стороны смонтированы вместе и обращены торцами к соответствующему фотоприемнику, а с другой стороны волокна каждого жгута смонтированы в однорядные линейки, которые суммарно образуют однорядную линейку из МК волокон, торцы которой обращены к выходу оптического объектива фотоприемного устройства и расположены в его фокальной плоскости, призменный светоделитель размещен между выходом акустооптического дефлектора и входом выходной оптической системы передающего канала, причем оптический вход измерительного канала соединен со вторым выходом призменного светоделителя, а выход соединен с входом компенсации угловых ошибок вычислительного устройства.
| СПОСОБ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2397510C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| US 5953110 A1, 14.09.1999 | |||
| ОГНЕСТОЙКАЯ КОМПОЗИТНАЯ ОСНОВА ДЛЯ БИТУМНЫХ КРОВЕЛЬНЫХ ЛИСТОВ | 2002 |
|
RU2271279C2 |

