Изобретение относится к области диагностирования центробежных машин, преимущественно насосов.
Цель изобретения - повышение точности и снижение трудоемкости диагностирования.
На фиг. 1 представлена функциональная схема устройства, с помощью которого осуществляется автоматическая диагностика машины; на фиг. 2 - схема .блока формирователя ортогональных составляющих X и Y вибросигнала; на фиг. 3 - схема блока получения модуля векторной разности: на фиг. 4 - принцип разложения вектора на ортогональные составляющие; на фиг. 5 - принцип получения модуля векторной разности.
Устройство содержит установленный на диагностируемой машине датчик вибрации 1, последовательно соединенные с ним усилитель 2 и синхронный полосовой фильтр 3, управляющий вход которого соединен с выходом формирователя 4 опорного сигнала, один из входов которого соединен с выходом датчика 5 оборотов. Выход синхронного полосового фильтра 3 соединен с одним из входов блока 6 формирования составляющих X и Y вибросигнала, выходы которого соединены с входами X и Y блоков 7 получения модуля векторной разности между исходным и текущим вектором каждой из составляющих. Второй вход блока 6 соединен с выходом формирователя 4 опорного сигнала. Управляющие входы формироватеХ|
О СО
:vi ;х1
ля 4 опорного сигнала и блоков 7 получения модуля векторной разности соединены с выходом задатчика частотных составляющих 8. Выходы блоков 7 соединены со входами блока 9 классификации неисправностей, выход которого соединен со входом блока 10 индикации,
В свою очередь блок формирования составляющих X и Y вибросигнала состоит из фазовращателя (ФВ) и двух устройств вы- борки и хранения УВХ (фиг. 2).
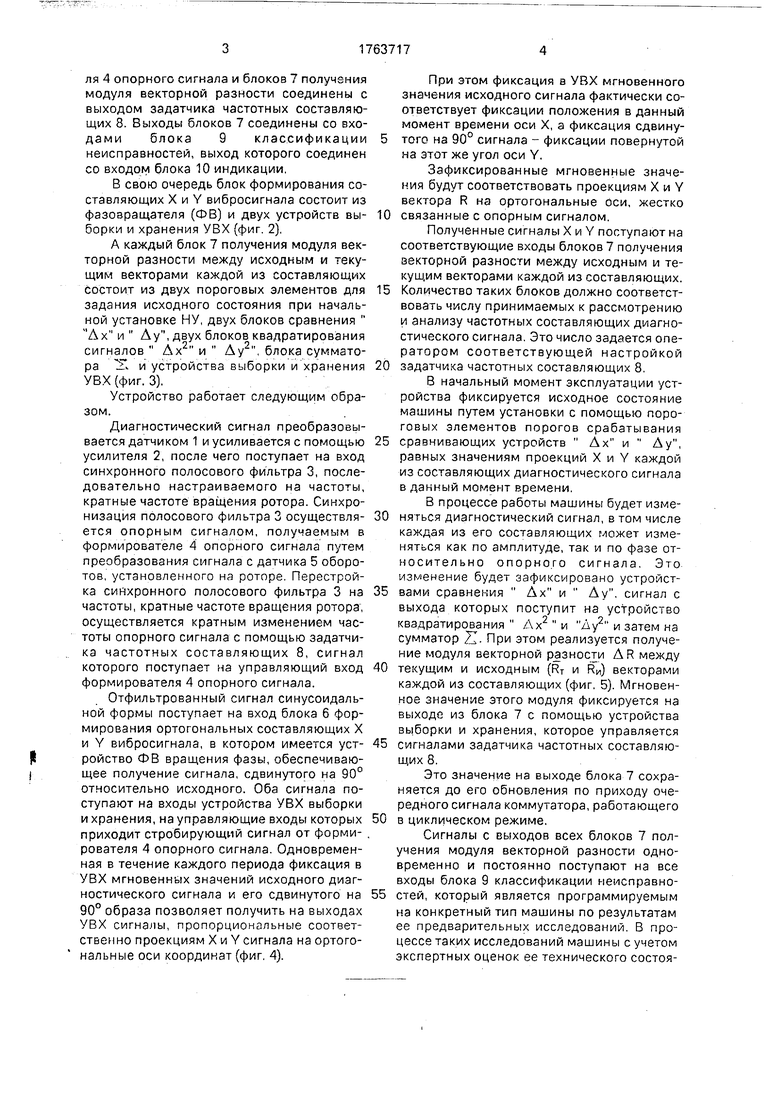
А каждый блок 7 получения модуля векторной разности между исходным и текущим векторами каждой из составляющих состоит из двух пороговых элементов для задания исходного состояния при начальной установке НУ, двух блоков сравнения Лх и Ау, двух блоков квадратирования сигналов Ах2 и Ау2, блока сумматора и устройства выборки и хранения УВХ (фиг. 3).
Устройство работает следующим образом.
Диагностический сигнал преобразовывается датчиком 1 и усиливается с помощью усилителя 2, после чего поступает на вход синхронного полосового фильтра 3, последовательно настраиваемого на частоты, кратные частоте вращения ротора. Синхронизация полосового фильтра 3 осуществля- ется опорным сигналом, получаемым в формирователе 4 опорного сигнала путем преобразования сигнала с датчика 5 оборотов, установленного на роторе. Перестройка синхронного полосового фильтра 3 на частоты, кратные частоте вращения ротора, осуществляется кратным изменением частоты опорного сигнала с помощью задатчи- кэ частотных составляющих 8, сигнал которого поступает на управляющий вход формирователя 4 опорного сигнала.
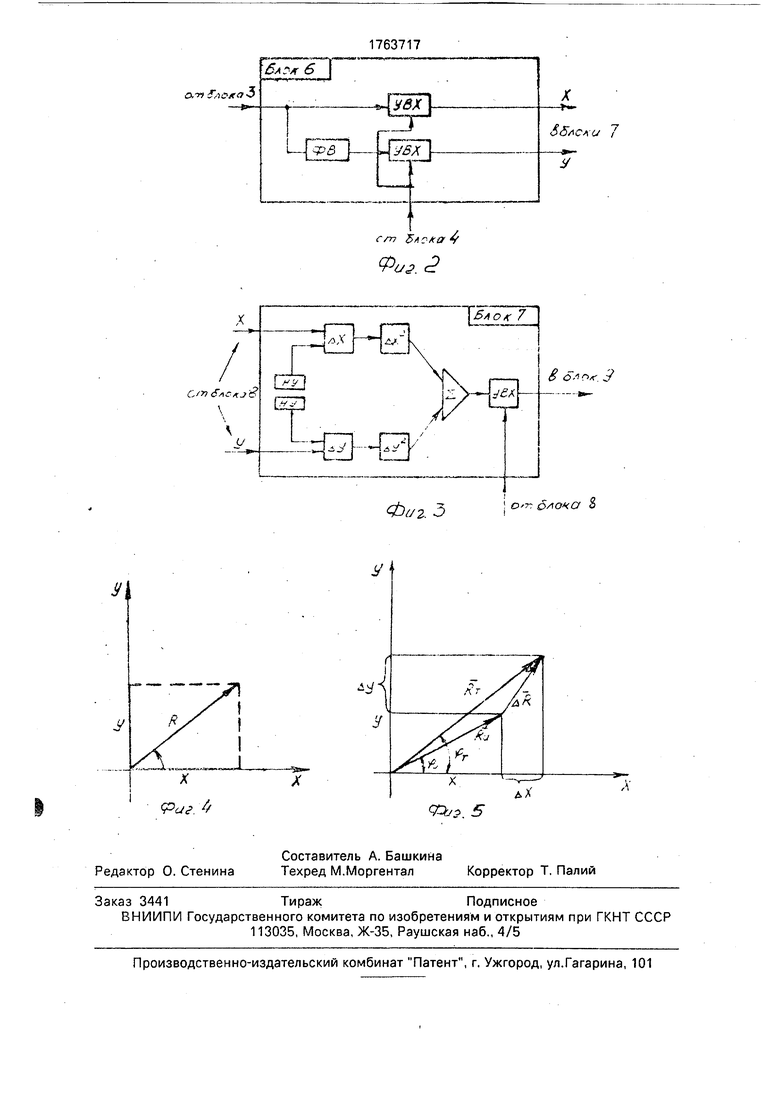
Отфильтрованный сигнал синусоидальной формы поступает на вход блока 6 формирования ортогональных составляющих X и Y вибросигнала, в котором имеется уст- ройство ФВ вращения фазы, обеспечивающее получение сигнала, сдвинутого на 90° относительно исходного. Оба сигнала поступают на входы устройства УВХ выборки и хранения, на управляющие входы которых приходит стробирующий сигнал от форми- рователя 4 опорного сигнала. Одновременная в течение каждого периода фиксация в УВХ мгновенных значений исходного диагностического сигнала и его сдвинутого на 90° образа позволяет получить на выходах УВХ сигналы, пропорциональные соответственно проекциям X и Y сигнала на ортогональные оси координат (фиг. 4).
При этом фиксация в УВХ мгновенного значения исходного сигнала фактически соответствует фиксации положения в данный момент времени оси X, а фиксация сдвинутого на 90° сигнала - фиксации повернутой на этот же угол оси Y.
Зафиксированные мгновенные значения будут соответствовать проекциям X и Y вектора R на ортогональные оси, жестко связанные с опорным сигналом.
Полученные сигналы X и Y поступают на соответствующие входы блоков 7 получения векторной разности между исходным и текущим векторами каждой из составляющих. Количество таких блоков должно соответствовать числу принимаемых к рассмотрению и анализу частотных составляющих диагностического сигнала. Это число задается оператором соответствующей настройкой задатчика частотных составляющих 8.
В начальный момент эксплуатации устройства фиксируется исходное состояние машины путем установки с помощью пороговых элементов порогов срабатывания сравнивающих устройств Ах и Ау, равных значениям проекций X и Y каждой из составляющих диагностического сигнала в данный момент времени.
В процессе работы машины будет изменяться диагностический сигнал, в том числе каждая из его составляющих может изменяться как по амплитуде, так и по фазе относительно опорного сигнала. Это изменение будет зафиксировано устройствами сравнения Ах и Ау. сигнал с выхода которых поступит на устройство квздратирования Лх и Л у2 и затем на сумматор ZI- При этом реализуется получение модуля векторной разности AR между текущим и исходным (RT и Ри) векторами каждой из составляющих (фиг. 5). Мгновенное значение этого модуля фиксируется на выходе из блока 7 с помощью устройства выборки и хранения, которое управляется сигналами задатчикз частотных составляющих 8.
Это значение на выходе блока 7 сохраняется до его обновления по приходу очередного сигнала коммутатора, работающего в циклическом режиме.
Сигналы с выходов всех блоков 7 получения модуля векторной разности одновременно и постоянно поступают на все входы блока 9 классификации неисправностей, который является программируемым на конкретный тип машины по результатам ее предварительных исследований. В процессе таких исследований машины с учетом экспертных оценок ее технического состояния выявляются закономерности изменений каждой из частотных составляющих диагностического сигнала в зависимости от появляющихся в машине неисправностей и в соответствии с комбинациями этих изменений выдается сигнал на блок 10 индикации, сигнализирующий о возникшей неисправности.
В результате достигается поставленная цель - повышение точности и снижение трудоемкости диагностирования.
Формула изобретения 1. Устройство для автоматической диагностики технического состояния гидромашины, содержащее установленные на диагностируемой гидромашине датчик числа оборотов и датчик вибрации, выход последнего через усилитель соединен с входом синхронного полосового фильтра, выход которого соединен со схемой формирования диагностических параметров, а уп- равляющий вход - с выходом формирователя опорного сигнала, вход которого подключен к датчику числа оборотов, отличающееся тем, что, с целью повышения точности и снижения трудоемкости диагностирования, схема формирова- ния диагностических параметров выполнена в виде блока формирования ортогональных проекций векторных составляющих, задатчика частотных составляющих, блоков вычисления векторных разностей, количество которых равно числу частотных составляющих и блока классификации неис0
5
0
5
0
5
правностей с индикатором на выходе, при этом блок формирования ортогональных векторных составляющих выполнен в виде двух элементов выборки-хранения и фазовращателя, причем выход полосового фильтра соединен с рабочим входом одного элемента выборки-хранения непосредственно, а с рабочим входом другого - через фазовращатель, задатчик частотных составляющих подключен к управляющим входам формирователя опорного сигнала и всех блоков вычисления векторных разностей, выходы последних соединены с блоком классификации неисправностей, а рабочие входы - с выходами элементов выборки-хранения, к управляющим входам которых подключен выход формирователя опорного сигнала.
2. Устройство поп, 1,отличающее- с я тем, что каждый блок вычисления модулей векторной разности выполнен в виде двух пороговых элементов, двух блоков сравнения, двух квадраторов, сумматора и элемента выборки-хранения, управляющий вход которого соединен с выходом задатчика частотных составляющих, выход - с блоками классификации неисправностей, а рабочий вход - с выходом сумматора, входы которого подключены к выходам квадраторов, а входы последних - с выходами блоков сравнения, входы каждого из которых соединены с одним пороговым элементом - с выходом одного элемента выборки-хранения блока формирования ортогональных составляющих.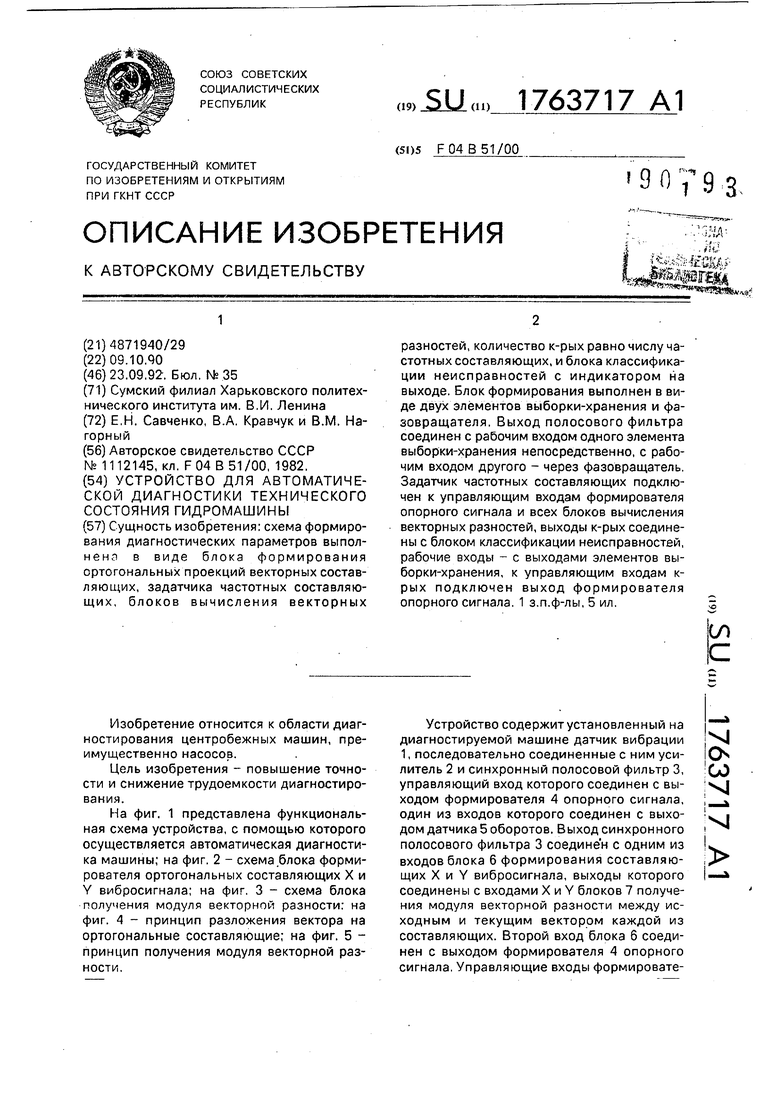

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СДВИГА ФАЗ ДВУХ СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1992 |
|
RU2007736C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2057346C1 |
| Статистический анализатор конечной разности фазы сигнала | 1988 |
|
SU1596270A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ СТЕПЕНИ КОНЦЕНТРАЦИИ ВНИМАНИЯ ОПЕРАТОРА ПРИ ВОСПРИЯТИИ И ОБРАБОТКЕ ИНФОРМАЦИИ | 2018 |
|
RU2704562C1 |
| Устройство для защиты от замыканий на землю | 1987 |
|
SU1492409A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА ДВУХ СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1992 |
|
RU2020494C1 |
| Устройство для диагностирования цилиндропоршневой группы двигателя внутреннего сгорания | 1990 |
|
SU1777021A1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И/ИЛИ ТРАНСМИССИИ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165605C1 |
| Ультразвуковой эхокардиограф | 1986 |
|
SU1530175A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
Сущность изобретения: схема формирования диагностических параметров выполнено в виде блока формирования ортогональных проекций векторных составляющих, задатчика частотных составляющих, блоков вычисления векторных разностей, количество к-рых равно числу частотных составляющих, и блока классификации неисправностей с индикатором на выходе. Блок формирования выполнен в виде двух элементов выборки-хранения и фазовращателя. Выход полосового фильтра соединен с рабочим входом одного элемента выборки-хранения непосредственно, с рабочим входом другого - через фазовращатель. Задатчик частотных составляющих подключен к управляющим входам формирователя опорного сигнала и всех блоков вычисления векторных разностей, выходы к-рых соединены с блоком классификации неисправностей, рабочие входы - с выходами элементов выборки-хранения, к управляющим входам к- рых подключен выход формирователя опорного сигнала. 1 з.п.ф-лы, 5 ил.
. /
o,f -3 - -4bLX
С Ъ 5лс-лз 3
(У
-М-.
L.
э-чз
х
5/1СА--
/
У
TXT Ялока у
с
T5/f 7
. 3
| Способ диагностики механизма | 1982 |
|
SU1112145A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
