1
(21)4817178/28
(22) 20.04.90
(46) 23.09.92. Бюл. № 35
(71)Московский институт приборостроения
(72)А.А.Титов
(56) Авторское свидетельство СССР № 8533378, кл. G 01 В 9/00, 1979.
Авторское свидетельство СССР № 1559251, кл. G 01 В 21/00, 1988. (54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА
Л
/
(57) Изобретение относится к измерительной технике, Целью изобретения является повышение производительности. Цель достигается тем, что в устройство, содержащее лазер 1, коллиматор 2, акустооптиче- ский модулятор 3, уголковые отражатели 4, 5, 6, линзу 7, фотоприемник 8, ключи 9, 10, фазометр 17, блок 18 управления, генератор 15 высокой частоты, введены генератор 16 высокой частоты, ключи 13, 14. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустооптический частотомер | 1988 |
|
SU1626092A1 |
| Устройство для измерения перемещений объекта | 1990 |
|
SU1795274A1 |
| Устройство для записи информации | 1988 |
|
SU1665396A1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ОПТИЧЕСКОГО СИГНАЛА СУММИРОВАНИЕМ ПУЧКОВ ИЗЛУЧЕНИЯ N ЛАЗЕРОВ В ВЕРШИНЕ КОНИЧЕСКОЙ ПОВЕРХНОСТИ И ПЕРЕДАТЧИК КОГЕРЕНТНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 1992 |
|
RU2109384C1 |
| Акустооптический спектроанализатор | 1986 |
|
SU1337805A1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2006 |
|
RU2326508C1 |
| Устройство для измерения скорости звука в жидкостях и газах | 1987 |
|
SU1538057A1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2006 |
|
RU2316142C1 |
| Акустооптоэлектронный спектроанализатор | 1988 |
|
SU1613971A1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2003 |
|
RU2246799C1 |

6
со
с
:vj о со
о° со
о
фиг.1
Изобретение относится к измерительной технике и может быть использовано для измерения продольных и поперечных перемещений объекта.
Известно устройство для измерения перемещений, содержащее лазер акустооптический модулятор, плоскопараллельную пластинку, дифракционную решетку, два отражателя, фотоприемник, фазометр, генератор высокой частоты.
Недостатком устройства являются ограниченные функциональные возможности, так как устройство не измеряет поперечных перемещений объекта.
Наиболее близким по технической сущности является устройство для измерения перемещений объекта, содержащее лазер, коллиматор, акустооптический модулятор, три триппель призмы, связанные с объектом, линзу, фотоприемник, два ключа, модулятор, генераторы низкой и высокой частот, фазометр, блок управления, индикатор. Недостатком устройства является низкая производительность, так как требуется предварительная юстировка устройства по поперечным координатам для определения продольной координаты.
Целью изобретения является повышение производительности.
Указанная цель достигается тем, что в устройство для измерения перемещений объекта содержащее последовательно оптически соединенные лазер, коллиматор, акустооптический модулятор, отражатель, установленный на объекте и выполненный в виде трех уголковых отражателей, верхние грани которых ориентированы параллельно взаимно-перпендикулярными осями, линзу и фотоприемник, фазометр, блок преобразования частот, генератор низкой частоты, генератор высокой частоты, два ключа, блок управления и вычисления, фотоприемник, выход которого соединен с первым входом фазометра, второй вход которого объединен с первым входом блока преобразования частот и соединен с выходом генератора низкой частоты, первый генератор высокой частоты, выход блока преобразования частот соединен с первыми входами ключей, вторые входы которых соединены соответственно с первым и вторым управляющими выходами блока управления и вычисления, выходы ключей соединены с первым и вторым входами акустоопти- ческого модулятора, выходы фазометра соединены соответственно с первыми информационными входами блока управления и вычисления, первый и второй управляющие входы которого являются шинами Запись и Пуск, информационные выходы
которого являются соответственно первой, второй и третьей выходными шинами, введены третий и четвертый ключи и второй генератор высокой частоты, причем выходы
генераторов высокой частоты соединены соответственно с первыми входами третьего и четвертого ключей, вторые входы которых соединены соответственно со вторым и третьим управляющими выходами блока управления и вычисления, выходы третьего и четвертого ключей объединены и соединены со вторым входом блока преобразования частот, вторые и третьи информационные входы блока управления и вычисления являются соответственно первой и второй шинами задания частот.
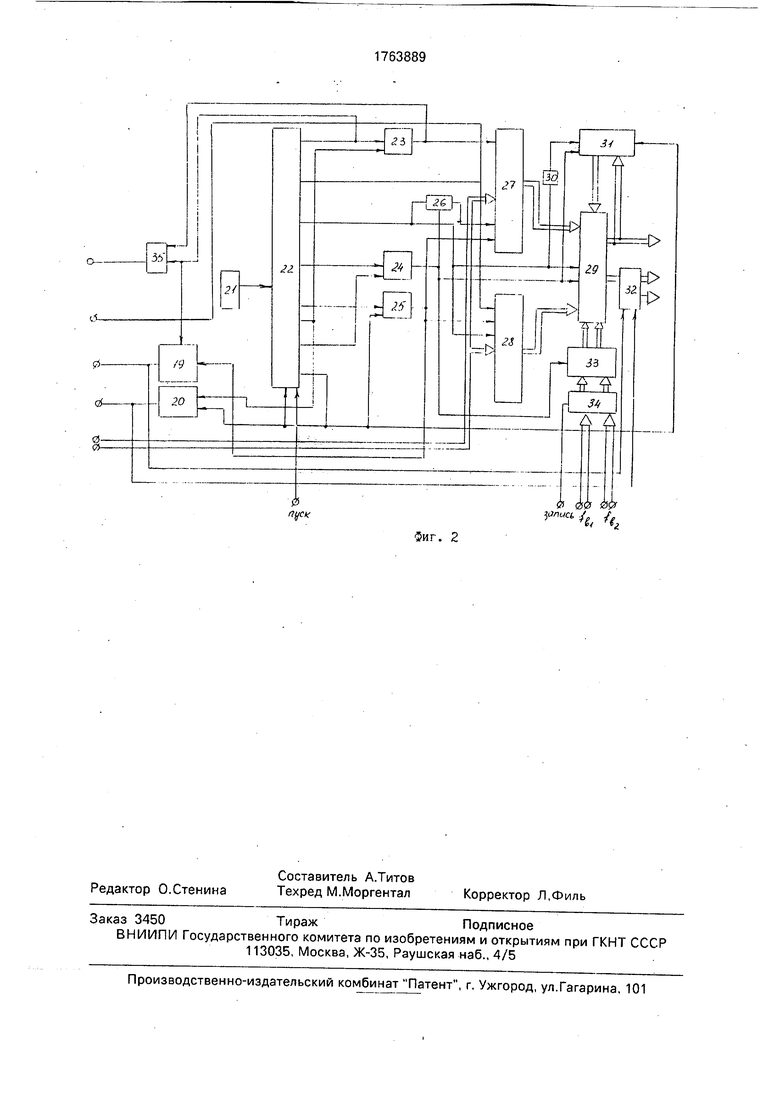
На фиг. 1 приведена функциональная схема устройства. На фиг. 2 - блок-схема блока управления и вычисления.
Устройство содержит оптически последовательно соединенные лазер 1, коллиматор 2, акустооптический модулятор 3, уголковые отражатели 4, 5, 6, установленные на объекте, линзу 7, фотоприемник 8,
первый и второй входы акустооптического модулятора 3 соединены соответственно с выходами ключей 9, 10, первые входы которых соединены с выходами блока 11 преобразования частот, первый вход которого
соединен с выходом генератора 12 низкой частоты, второй вход блока 11 соединен с выходами ключей 13, 14, первые входы которого соединены соответственно с выходами генераторов 15, 16 высокой частоты,
выходы фотоприемника 8 и генератора 12 низкой частоты соединены соответственно с первым и вторым входами фазометра 17, выходы которого соединены соответственно с первыми информационными входами
блока 18 управления и вычисления, первый и второй управляющие выходы которого соединены соответственно со вторыми входами ключей 9. 10, первый и второй управляющие входы блока 18 являются шинами Запись и Пуск, вторые и третьи информационные входы - являются первой и второй шинами задания частот, первый, второй и третий информационные выходы которого являются соответственно первой,
второй и третьей выходными шинами, третий и четвертый управляющие входы соединены соответственно со вторыми входами ключей 13, 14.
Блок управления и вычисления содержит триггеры 19, 20, выходы которых являются первым и вторым выходами блока, генератор 21 импульсов, выход которого соединен с тактовым входом регистра 22 сдвига элементы 23 24, 25,26 ИЛИ, регистры 27,
28, вычислитель 29, элемент 30 задержки,
регистр 31, коммутаторы 32, 33, запоминающее устройство 34 и элемент 35 ИЛИ.
Первый выход регистра 22 соединен с первым входом элемента 23, выход которого соединен с входом записи кода регистра 27, второй выход регистра 22 соединен с входом записи кода регистра 28 и является вторым управляющим выходом блока 18, первый управляющий выход которого через элемент 35 соединен с первым входом триггера 19 и выходом элемента 23, третий выход регистра 22 соединен с входами передачи кода регистров 27,28, первым входом управления вычислителя 29 и через элемент 30 соединен с входом записи кода регистра 31, четвертый выход регистра 22 соединен с первым входом элемента 24, выход которого соединен со вторым входом элемента 26, вторым входом управления вычислителя 29, входом передачи кода регистра 31, входом управления коммутатора 33 и через элемент 26 - с входом передачи кода регистра 27, пятый выход регистра 22 соединен с первым входом элемента 25, выход которого соединен с входами сброса регистров 27, 28 и вторым входом триггера 19, шестой выход регистра 22 соединен с первым входом элемента 23 и первым входом триггера 20, седьмой выход регистра 22 соединен со вторым входом элемента 24, восьмой выход регистра 22 соединен с входами сброс регистров 22, 31, со вторыми входами элемента 25 и триггера 20, вход Пуск регистра 22 является вторым информационным входом блока 18, выходы триггеров 19 и 20 являются третьим и четвертым управляющими выходами блока 18 и соединены соответственно с первым и вторым управляющими входами коммутатора 32, выходы регистров 27, 28, 31, первые и вторые выходы коммутатора 33 соединены соответственно с первыми, вторыми, третьими, четвертыми и пятыми информационными входами вычислителя 29. первые выходы которого соединены с информационными входами регистра 31 и являются первыми информационными выходами блока 18, вторые выходы вычислителя 29 соединены с информационными входами коммутатора 32, первые и вторые выходы которого являются вторыми и третьими информационными выходами блока 18 информационные входы регистров 27. 28 являются первым информационным входом блока 18, первые и вторые информационные входы коммутатора соединены соответственно с первыми и вторыми выходами запоминающего устройства 34, вход управления которого является третьим управляющим входом блока, а первые и вторые информационные входы
являются вторыми и третьими информационными входами блока.
Акустооптический модулятор (АОМ) 3 может быть выполнен в виде кубического
кристалла, на взаимно перпендикулярные грани которого нанесены пьезопреобра- зователи, к которым через ключи 9, 10 присоединен выход блока 11. Вершины отражателей 4, б ориентированы вдоль оси X,
0 а отражателя 5 - вдоль оси Y. В результате при смещении объекта по X отражатели 4, 6 сдвигают луч параллельно оси X, а при смещении по Y параллельно оси Y.
Рассмотрим работу устройства при по5 даче сигнала на первый вход АОМ 3, тогда дифрагированные на АОМ пучки будут ле- жать в плоскости XOZ. Если блок 11 выполняется в виде модулятора, то на АОМ 3 будет подан амплитудно-модулированный сигнал
0
U (1 -г mcos шн t) COS cos +
+ у cos ((l)в + ) t + - COS (wei - run) t,
(1) 5 где m - глубина модуляции;
7)B1, (0H - высокая и низкая частоты. Если блок 11 выполняется в виде смесителя, то на АОМ 3 можно подать напряжения двух частот и WB1 . При подаче на
0 ДОМ 3 амплитудно-модулированного сигнала в выходном сигнале, кроме первой гармоники, на фотоприемник 8 будет появляться вторая гармоника 2 WH, а при подаче только двух частот вторая гармоника будет от сутст5 вовать.
Поскольку амплитуда второй гармоники 2
пропорциональна - то в дальнейшем ее
п можно не учитывать. Поэтому для упрощения математических выражений будем считать, что на АОМ 3 подаются два напряжения с частотами а%1 и . При подаче на АОМ двух напряжений пол- - учим два дифрагированных пучка + 1 порядка, ибо остальные порядки могут быть отфильтрованы на щели фотоприемника 8. Тогда углы дифракции света будут равны:
0 sin 4, Sin(0Bl+6 H)
а в
/.fBl AfH,}
зв U3B V
где гьв - скорость звука в АОМ 3; еА - длина волны света.
Полагая, что частота fK выбрана таким образом, что дифрагированные на АОМ пучки интерферируют между собой, фронт падающей на АОМ волны плоский и АОМ осуществляет неглубокую фазовую модуляцию.
/ sin
К1щ&
можно получить следующее выражение для сигнала на выходе фотоприемника при подаче частоты fBi:
Сх 1щх/2 U / /) lexp i f«ai t + KZcos 0B1 +
Cx - 1щх/2I
+ KXsin (9Bi + exp i + WH) t + К Z cosx
x(Ui + ft) + KXsin (&i + ft,) / 2 dx 0
-- COS («Ан ) .
(3)
где К Cx в - К Z ft, 6в1 - фаза сигнала; щх - ширина щели фотоприемника; Сх смещение объекта по оси X;
о г
К -Y - волновое число.
При подаче на блок 11 другой высокой частоты fa2 получим аналогично предыдущему следующее выражение для фазы сигнала:
уЭ2Х К Сх О - К Z в &2(4)
Возьмем разность фаз этих двух сигналов:
pix К#н (#B2-#Bi)Z (5) Отсюда видно, что Ау пропорциональна только продольным перемещениям объекта.
Для нахождения фазы, пропорциональной поперечным перемещениям объекта выразим Z из (5) и подставим в выражение
х.
Тогда получим:
Фпопх К вн Сх + №)
L IB
где AfB fei - fs2.
Таким образом, подавая на блок 11 разные частоты foi и fB2 и производя вычисления по выражениям (5) и (6). можно выделить информацию о продольных и поперечных перемещениях объекта. Подавая сигнал на другой вход АОМ 3, можно получить аналогичные выражения для фазы при смещении объекта по оси Y:
piy KCy#H-KZ6 H#Bi(7)
у к су ен - к z вн ол
Ар - 02У К #н (0в2 - 0В1) Z (8)
Сравнивая выражения (5) и (8), можно видеть, что они одинаковы. Следовательно, продольную координату достаточно вычислить только один раз. Из (7) получим
Аюпу К&Су 1У+Ду5 (д)
/Л г в
В соответствии с изложенным алгоритмом рассмотрим подробнее работу устройства. На блок 18 подается сигнал Пуск, а результате чего импульсы генератора 21 начинают последовательно появляться на выходах регистра 22. Импульс с первого выхода регистра 22 через элемент 23 поступает на ключ 13, триггер 19 и на вход записи кода регистра 27. В результате срабатывают ключ 13, триггер 19, на блок 11 подается напряжение частоты fBi с генератора 15 и на
выходе блока 11 формируются сигналы трех или двух частот, которые поступают на первый вход АОМ 3, С выхода фотоприемника 8 сигнал, фаза которого равна fix, подается на фазометр 17, цифровой код с которого пропорциональный фазе /Э1Х записывается в регистр 27. Далее импульс появляется на втором выходе регистра 22, включается ключ 14 и на блок 11 подается напряжение частоты fa2 с генератора 16. Фазометр измерит фазу р2, цифровое значение которой запишется в регистр 28, так как на вход записи кода которого подается импульс. Далее импульс появляется на третьем выходе регистра 22. Он поступает на входы передачи кода регистров 27. 28 и на первый вход управления вычислителя 29. В результате коды из регистров 27, 28 поступают в вычислитель 29. который вычисляет разность фаз по выражению 5 и соответствующий код появляется на первых выходах вычислителя 29. Этот код пропорционален продольным перемещениям объекта. Одновременно код записывается в регистр 31. так как на его вход записи через элемент 30 также поступает импульс. Задержка необходима на время проведения вычислений в вычислителе 29. Далее импульс с четвертого выхода регистра 22 через элементы 24. 26 поступает на входы передачи кода регистров 27, 31, на
второй управляющий вход вычислителя 29 и на вход управления коммутатора 33. В запоминающем устройстве (ЗУ) 34 записаны коды частот гВ1 и f32 на выходах генераторов 15, 16. которые могут быть измерены частотомером и по команде запись внесены в ЗУ 34.
В результате в вычислитель 29 поступают коды с регистров 27. 31 и из ЗУ 34. Вычислитель вычисляет фазу, пропорциональную «/Эпопх код которой через открытый по первому управляющему входу коммутатор 32 поступает на вторые информационные выходы устройства. В результате на втором и третьем информационных выходах
устройства формируются коды о продольных и поперечных по оси X перемещениях объекта. Далее происходит обнуление регистров 27 и 28 и измерения перемещений по оси Y. Импульс с пятого выхода регистра 22
через элемент 25 поступает на входы сброс регистров 27, 28 и триггер 19. В результате регистры 27, 28 обнуляются, а триггер 19 сбрасывается и выключает ключ 10. Импульсы с шестого выхода регистра 22
через элемент 23 поступают на вход записи кода регистра 27 и через элемент 35 на ключ 13, а также на триггер 20, который включает ключ 9 и сигнал с выхода блока 11 поступает на АОМ. Фазометр измерит фазу , которая запишется в регистр 27. Импульс с седьмого выхода регистра 22 через элементы 24 и 26 поступает на входы передачи кода регистров 27, 31 и на коммутатор 33. В результате коды из регистров 27. 31 и из ЗУ 34 поступают в вычислитель 29, который вычисляет фазу узпопу. Так как на коммутатор 32 с триггера 20 поступает сигнал на второй вход управления, то выходы вычислителя 29 будут подключены к первым информационным выходам устройства, код на которых соответствует у попу- Импульс с восьмого выхода регистра 22 поступает на входы сброс регистров 27, 28, 31. на выключение триггера 20 и самого регистра 22. Результаты измерений с выходов устройства могут быть выведены на индикатор (на фиг. 1 не показан) или введены в ЭВМ для последующего использования.
Полный цикл измерений закончился. Для проведения новых измерений нужно опять подать сигнал Пуск. Таким образом, измерения производятся в автоматическом режиме и в отличие от прототипа не требуют каждый раз предварительной юстировки по поперечным координатам, что повышает производительность измерений. Формула изобретения Устройство для измерения перемещения объекта, содержащее последовательно установленные и оптически связанные лазер, коллиматор, акустооптический модулятор, отражатель, установленный на объекте и выполненный в виде трех уголковых отражателей, верхние грани которых ориентированы параллельно взаимно перпендикулярным осям, линзу и фотоприемник, фазометр, блок преобразования частот, генератор низкой частоты, генератор высокой частоты, два ключа, блок управления и вычисления, выход фотоприемника соединен с первым входом фазометра, второй вход которого объединен с первым- входом блока преобразования частот и соединен с выходом генератора низкой частоты, выход блока преобразования частот соединен с
первыми входами ключей, вторые входы которых соединены соответственно с первым и вторым управляющими выходами блока управления и вычисления, выходы ключей соединены соответственно с первым и вторым входами акустооптического модулятора, выходы фазометра соединены соответственно с первыми информационными входами блока управления и вычисления, первый и второй управляющие входы
которого являются шинами Запись и Пуск, первые, вторые и третьи информационные выходы которого являются соответственно первой, второй и третьей выходными шинами, отличающееся тем, что, с
целью повышения производительности, в него введены третий и четвертый ключи и второй генератор высокой частоты, блок управления и вычисления выполнен с третьим, четвертым управляющими выходами и вторыми и третьими информационными входами, выходы генераторов высокой частоты соединены соответственно с первыми входами третьего и четвертого ключей, вторые входы которых соединены соответственно с
третьим, четвертым управляющими выходами блока управления и вычисления, выходы третьего и четвертого ключей объединены и соединены с вторым входом блока преобразования частот, вторые и третьи информационные входы блока управления и вычисления являются соответственно первой и второй шинами задания частот.
0- 00 пуск
Ь && 0& Vnva f(i
Фиг. 2
