Изобретение относится к машиностроению и касается автоматизированного оборудования для контроля пневматических ручных машин вращательного действия при изготовлении, ремонте и обслуживании.
Известен способ выходного контроля пневматических ручных машин вращательного действия, имеющих выходной вал, при котором запускают машину, измеряют частоту вращения ее выходного вала, вычисляют ее максимум и сравнивают с номинальной величиной 1 При этом способе каждая машина устанавливается в нагружатель и нагружается постоянным значением момента М, при котором находят постоянное значение частоты вращения N (об/мин) и вычисляют мощность Р по формуле
Р яММ/30 (Вт)
Каждая полученная таким образом пара чисел (N, Р) определяет точку на механической характеристике машины Многократно повторяют измерения мощности Р при различных значениях момента М от холостого хода до полной остановки машины и по точкам строят кривую зависимости мощности от частоты вращения По этой кривой определяют частоту N вращения вала при максимальной мощности Затем задают и стабилизируют частоту вращения N и измеряют значения крутящего момента М и расхода Q воздуха Значения М измеряют не менее трех раз Находят величину максимальной мощности Р как среднее значение Величины N, Р, Q определяют годность или негодность машины в сравнении с номинальными величинами
Этот способ контроля 1 непроизводителен, так как требует многократного измерения мощности, построения характеристики, нахождения на ней максимума и сравнения его с номинальным значением и не может быть применен при серийном и массовом выпуске ручных машин Построение кривой по
сл
с
ч о сл
XI
hO СЛ
токам и определение максимума по графику имеет невысокую точность.
Кроме того, погрешности в определении, задании и стабилизации частоты вращения N вносят значительную погрешность в опре- деление величины расхода Q.
Наиболее близким к заявляемому является устройство выходного контроля пневматических ручных машин вращательного действия, содержащее нагружатель в виде маховика, связанные с валом маховика первичный преобразователь и тормоз с пусковым устройством, имеющим вход, измеритель расхода воздуха и вычислительное устройство, вход которого связан с первичным преобразователем 2. В этом устройстве первичный преобразователь является датчиком ускорения, а вычислительное устройство является аналоговым и состоит из интегратора и умножителя. Мощность определяется с помощью вычисли- тельногр устройства, на вход которого поступает сигнал от датчика ускорения, Мощность определяется однократно при разгоне от одного фиксированного значения угловой скорости до другого и является средним значением мощности на интервале разгона. Таким образом, получение мгновенных значений мощности, а значит, и определение точного значения ее максимума не представляется возможным. Поскольку требованиями на ручные пневматические машины вращательного действия регламентируются номинальные параметры этих ма- шин: максимальная мощность Р (соответствует экстремуму механической характеристики пневмопривода), частота вращения N вала и расхода воздуха Q при максимальной мощности, - то устройство 2 не может быть использовано для контроля пневматических машин вращательного дей- ствия.
Устройство 2 также имеет невысокую производительность и. недостаточную надежность контроля параметров пневматических машин, что определяется нестационарностью и неопределенностью механической характеристики в момент пуска пневматического лопастного пневмопривода ручных машин вращательного действия. Это связано с тем, что при запу- ске машины, когда угловая скорость вращения близка к нулю, отсутствуют силы, прижимающие лопатки к статору, поэтому возможно западание лопаток. При этом воздух перетекает от впуска на выхлоп, и пневмодвигатель, нагруженный маховиком, медленно разгоняется или вообще не трогается с места. В первом случае снижается производительность стенда, а во втором
ухудшается надежность его запуска, Кроме того, выбег маховика после окончания измерений снижает производительность контроля, особенно при массовом выпуске.
Следует учесть, что используемые в устройстве 2 аналоговое вычислительное устройство и датчик ускорений для измерения угловых ускорений обладают низкой точностью.
Цель изобретения - расширение области применения, повышение производительности, надежности и точности определения номинальных параметров,
Поставленная цель достигается тем, что устройство выходного контроля пневматических ручных машин вращательного действия снабжено электроприводом, кинематически связанным с маховиком, пусковым устройством испытуемой машины, имеющим вход, а пусковое устройство электропривода имеет вход, причем вычислительное устройство является устройством программного управления и имеет дополнительный вход и три выхода, дополнительный вход устройства программного управления связан с измерителем расхода воздуха, а выходы - со входами пусковых устройств электропривода, тормоза и пускового устройства испытуемой машины, причем первичный преобразователь выполнен в виде импульсного преобразователя угла и связан с вычислительным устройством через формирователь.
Так как электропривод кинематически связан с маховиком, являющимся нагружа- телем для испытуемой пневматической машины, то при включении вычислительным устройством программного управления пусковых устройств электропривода и испытуемой пневматической машины и выключении посредством пускового устройства тормоза обеспечивается надежный и ускоренный запуск шпинделя пневматической машины с маховиком. Скорость вращения контролируется вычислительным устройством с помощью первичного преобразователя, По достижении скорости вращения, необходимой для надежного разгона маховика испытуемой пневматической машины, вычислительное устройство программного управления отключает электропривод и начинает собственно вычисление текущей мощности на шпинделе испытуемой пневматической машины. Использование в качестве первичного преобразователя угла импульсного преобразователя позволяет с высокой точностью фиксировать приращение угла, благодаря чему исключается операция вычитания, что снижает погрешность при определении угловой скорости. Связь
первичного преобразователя с вычислительным устройством программного управления, т Ште Тб идательГобес пёчйва ёт возможность1 ШЩрёния времен н ых интервалов, соответствующих угловым интервалам, задаваемым импульсным преобразователем угла. Импульсы от преобразователя угла поступают на вход формирователя, на выходе которого формируются ворота, соответствующие интервалу времени между двумя последовательными импульсами преобразователя угла. Как известно, современные методы измерения временных интервалов 3 имеют настолько малую погрешность, что несмотря на увеличение погрешности при взятии производной угловой скорости по времени d (о /dt, суммарная погрешность вычисления углового ускорения (а вместе с ним и мгновенной мощности) оказывается значительно ниже, чем погрешность вычисления мощности в прототипе 2.
Вычислительное устройство вычисляет мгновенную мощность при каждом импульсе первичного преобразователя и сравнива ётеёс предыдущими значениями мощности для определения максимума. Подбор дискретности импульсного датчика позволяет обеспечить необходимую точность вычисления максимума. В момент достижения р устройство программного управления фиксирует значение частоты вращения N с помощью первичного преобразователя и расхода Q с помощью измерителя расхода воздуха. Этим обеспечивается возможность и необходимая точность определения номинальных TiatfaMefp oB, что расширяет область применения заявляемого устройства на пневматические ручные машины вращательного де йствия, Величина момента инер- ции маховика определяет режим ра згона, требуемый по условиям соответствия вели- чиньГО и величин Р и N и их точности Остановка подобным образом выбранного ма о йГтгребует определенного времени. Поэтому по окончании измерений (достижения максимума мощности и взятия отсчета гно мШШэШх параметров) вычислительное у стро йство программного управления организует ускоренную остановку маховика сле- дующим образом: выключает подачу воздуха с помощью пускового устройства испытуемой машины и включает пусковое устройство тормоза (при необходимости включает электродвигатель в реверсивном ШНр аШеЖи). Тем самым испытания закон- че Ш Т л агЪдарТ этому длителыность цикла запуск-йзмерение-останов занимает наименьшее из всех возможных время, которое неЪревьТшаеТЙесТЙлъкйх секунд При этом
повышается производительность, надежность и точность измерений, обеспечивается возможность расширения области примененИя за счет использования устройства при массовом выпуске пневматических
ручных машин. Все это характеризует изобретение как соответствующее критерию положительный эффект.
Известно использование электропривода для привода машин и механизмов 2.
0 Однако использование электропривода для обеспечения надежного запуска при контроле и испытаниях пневматической ручной машины вращательного действия, нагруженной маховиком, нам не известно. Ис5 пользование его в предлагаемом устройстве создает сверхсуммарный эффект: повышение надежности запуска.
Вычислительные устройства для управления известны. Однако вычислительное ус0 тройство программного управления, имеющее дополнительный вход и три выхода, причем этот вход соединен с измерителем расхода воздуха, а выходы - со входами пусковых устройств электропривода, тормо5 за и пускового устройства испытуемой машины, нам не известно.
Известно использование импульсного преобразователя вместе с формирователем для измерения мощности 4. Однако исполь0 зование импульсного преобразователя, связанного с вычислительным устройством через формирователь, для повышения точности снятия номинальных параметров пневматической ручной машины вращательного дейст5 вия: угловой частоты вращения и расхода воздуха, соответствующих максимуму мощности, - нам не известно. Использование импульсного преобразователя, связанного с вычислительным устройством, через форми0 рователь создает сверхсуммарный эффект: расширение области применения на пневматическое ручные машины вращательного действия и повышение точности определения их номинальных параметров.
5 Таким образом, сравнительный анализ известных устройств и признаков, изложенных в отличительной части формулы, показывает, что два известных признака использованы по новому назначению и име0 ют сверхсуммарный эффект, а другие отличительные признаки в отдельности и в совокупности в известных технических устройствах не известны. Поэтому предложенное техническое решение следует признать
5 соответствующим критерию существенные отличия.
На фиг. 1 изображена схема устройства; на фиг. 2 - механическое характеристики испытуемой машины.
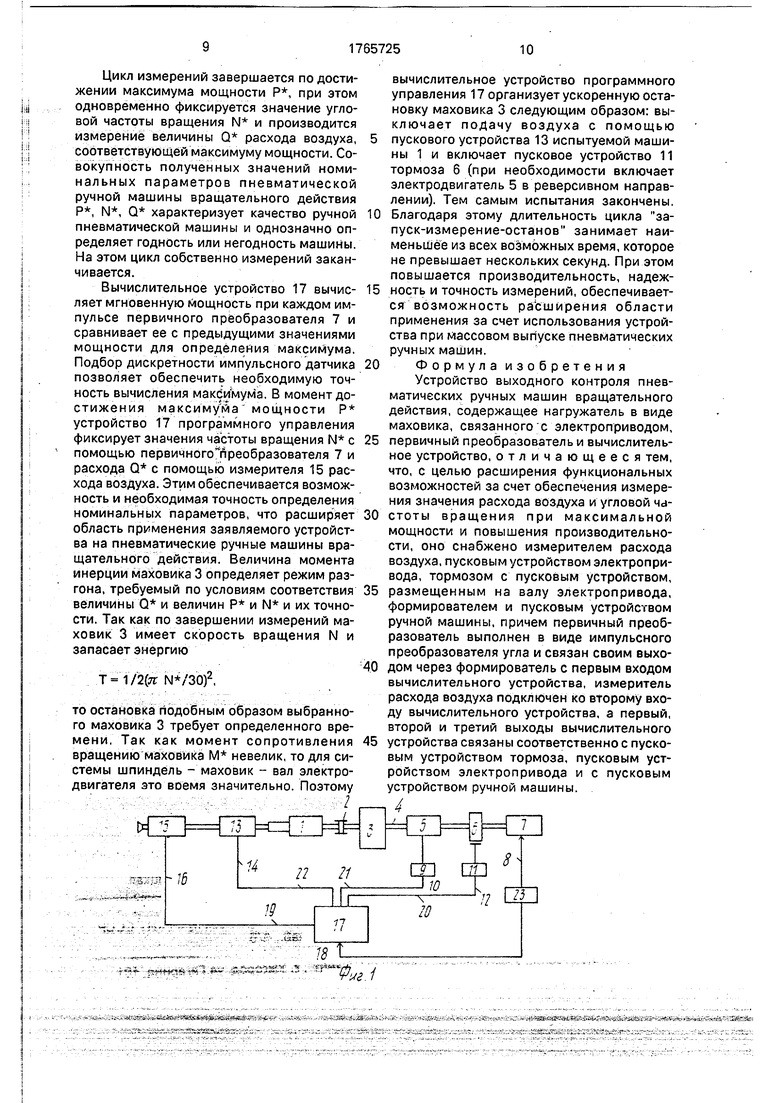
Испытуемая пневматическая ручная машина 1 вращательного действия муфтой 2 соединена с маховиком 3, закрепленным на валу 4 электродвигателя 5. Другой конец вала электродвигателя снабжен электро- магнитным тормозом 6 и соединен с первичным преобразователем 7 угла поворота, имеющим выход 8. Электродвигатель 5 имеет пусковое устройство 9 со входом 10, а тормоз 6 имеет пусковое устройство 11 со входом 12. Запуск машины 1 осуществляется пусковым устройством 13 со входом 14, Устройство выходного контроля также снабжено измерителем 15 расхода воздуха с выходом 16 и вычислительным устройством 17, являющимся устройством программного управления со входом 18 и дополнительным входом 19 и тремя выходами 20, 21 и 22. Вход 18 устройства программного управления 17 через формирователь 23 соединен с выходом 8 первичного преобразователя 7, а дополнительный вход 19 - с выходом 16 измерителя расхода воздуха 15, а выходы 20, 21 и 22 соединены со входами 12, 10 и 14 устройств 11, 9 и 13 запуска тормоза 6, элек- тродвигателя 5 и испытуемой машины 1 соответственно.
Механические характеристики испытуемой пневматической машины (фиг, 2): кривая 23 - крутящий момент M(N), кривая 24 - мощность на шпинделе P(N) и кривая 25 - расхода Q(N) воздуха в зависимости от частоты N вращения. При контроле пневматических машин вращательного действия определяют номинальные параметры 26, 27 и 28 частоты вращения N, максимума мощности P(N) и расхода воздуха Q(N) соответственно на частоте 26 вращения N, 29 - частота вращения NI надежного запуска машины.
Устройство работает следующим обра- зом. После установки машины 1, соединения ее муфтой 2 с маховиком 3 и закрепления ее (устройство закрепления на фиг. 1 не показано) устройство 17 программного управления включает устройства 9 и 13 запуска электродвигателя 5 и испытуемой машины 1 соответственно. Начинается ускоренный разгон вала 4 маховика 3. Уст- ройство 17 программного управления контролирует через формирователь 23, на который поступают импульсы от первичного преобразователя 7, разгон пневматической машины 1. Импульсы от первичного преоб- разователя 7 поступают на вход формирователя 23, на выходе которого формируются импульсы, соответствующие интервалу времени между двумя последовательными импульсами первичного преобразователя 7,
поступающие на вход 18 устройства 17 программного управления. По достижении частоты Nt вращения 29 маховика, соответствующей надежному запуску машины, устройство 17 программного управления отключает электродвигатель 5 через пусковое устройство 9 по выходу 21. Теперь испытуемая машина 1 продолжает самостоятельно разгонять маховик 3. При этом представляющая точка проходит по кривой 24 слева направо от точки 30, соответствующей частоте вращения NI (точка 29), при которой осуществляется надежный запуск. Текущая мощность вычисляется по формуле:
Р JTNM/30,
где М lE + Mc,
I - момент инерции маховика;
Е - угловое ускорение;
Мс - момент сопротивления вращения маховика.
По достижении точки 27 кривой 24, где мощность достигает максимума
Р P(N),
устройство 17 программного управления производит отсчет величины расхода с помощью измерителя расхода 15 по дополнительному входу 19
Q - Q(N).
На этом измерения заканчиваются. Устройство 17 программного управления выключает пусковое устройство 13 машины по выходу 22 и включает пусковое устройство 11 тормоза 6 по выходу 20, обеспечивая ускоренный останов машины, Возможно одновременное включение электродвигателя 5 в реверсивном направлении для ускоренного останова, После остановки маховика 3, о чем сигнализирует первичный преобразователь 7 через формирователь 23 по входу 18, устройство 17 программного управления отключает тормоз 6 по выходу 20 (и электродвигатель 5 по выходу 21 в случае реверса) и завершает цикл испытания, сигнализируя оператору об окончании испытаний.
Совместный запуск пневмопривода испытуемой машины 1 и кинематически соединенного с ним электропривода 5 маховика 3 обеспечивает надежный и ускоренный разгон вала ручной пневматической м.ашины 1 и соединенного с ним маховика 3 (для обеспечения необходимой нагрузки) до заданной скорости, на которой начинается цикл измерений.
Цикл измерений завершается по достижении максимума мощности Р, при этом чодновременно фиксируется значение угловой частоты вращения N и производится 1измерение величины Q расхода воздуха,
соответствующей максимуму мощности. Совокупность полученных значений номинальных параметров пневматической ручной машины вращательного действия Р, N, Q характеризует качество ручной пневматической машины и однозначно определяет годность или негодность машины. На этом цикл собственно измерений закан- 1чивается.
Вычислительное устройство 17 вычис- ляет мгновенную мощность при каждом им«пульсе первичного преобразователя 7 и
jсравнивает ее с предыдущими значениями
|мощности для определения максимума.
|Подбор дискретности импульсного датчика
позволяет обеспечить необходимую точность вычисления максимума. В момент до- стижения максимума мощности Р устройство 17 программного управления фиксирует значения частоты вращения N с помощью первичного преобразователя 7 и расхода Q с помощью измерителя 15 расхода воздуха. Этим обеспечивается возможность и необходимая точность определения номинальных параметров, что расширяет область применения заявляемого устройства на пневматические ручные машины вращательного действия. Величина момента инерции маховика 3 определяет режим разгона, требуемый по условиям соответствия величины Q и величин Р и N и их точности. Так как по завершении измерений маховик 3 имеет скорость вращения N и запасает энергию
Т 111(п )2
то остановка подобным образом выбранного маховика 3 требует определенного времени. Так как момент сопротивления вращению маховика М невелик, то для системы шпиндель - маховик - вал электродвигателя это воемя значительно. Поэтому
;
5
10
15
0
5 0 5
0
5
вычислительное устройство программного управления 17 организует ускоренную остановку маховика 3 следующим образом: выключает подачу воздуха с помощью пускового устройства 13 испытуемой машины 1 и включает пусковое устройство 11 тормоза 6 (при необходимости включает электродвигатель 5 в реверсивном направлении). Тем самым испытания закончены Благодаря этому длительность цикла запуск-измерение-останов занимает наименьшее из всех возможных время, которое не превышает нескольких секунд. При этом повышается производительность, надежность и точность измерений, обеспечивается возможность расширения области применения за счет использования устройства при массовом выпуске пневматических ручных машин.
Формула изобретения Устройство выходного контроля пневматических ручных машин вращательного действия, содержащее нагружатель в виде маховика, связанного с электроприводом, первичный преобразователь и вычислительное устройство, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения измерения значения расхода воздуха и угловой частоты вращения при максимальной мощности и повышения производительности, оно снабжено измерителем расхода воздуха, пусковым устройством электропривода, тормозом с пусковым устройством, размещенным на валу электропривода, формирователем и пусковым устройством ручной машины, причем первичный преобразователь выполнен в виде импульсного преобразователя угла и связан своим выходом через формирователь с первым входом вычислительного устройства, измеритель расхода воздуха подключен ко второму входу вычислительного устройства, а первый, второй и третий выходы вычислительного устройства связаны соответственно с пусковым устройством тормоза, пусковым устройством электропривода и с пусковым устройством ручной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2012 |
|
RU2521788C2 |
| СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА | 2018 |
|
RU2714022C2 |
| Электроагрегат газопоршневой | 2023 |
|
RU2798400C1 |
| ПРИВОДНАЯ СИСТЕМА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ УКАЗАННОЙ СИСТЕМОЙ | 2017 |
|
RU2723370C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМОМ РАБОТЫ ПЛАЗМОТРОНА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389055C2 |
| РАЗГОННОЕ УСТРОЙСТВО ДЛЯ ВЗЛЕТА КОРАБЕЛЬНЫХ САМОЛЕТОВ | 2019 |
|
RU2712407C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН В ДИНАМИЧЕСКОМ РЕЖИМЕ | 2014 |
|
RU2561230C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |

Сущность изобретения- устройство содержит. 1 ручную машину (1), 1 муфту (2), 1 маховик (3), 1 электропривод (5), 1 тормоз (6), 1 первичный преобразователь (7), 1 пусковое устройство (9) электропривода, 1 пусковое устройство (11) тормоза, 1 пусковое устройство (13) ручной машины, 1 ручную машину (15), 1 вычислительное устройство
.4Ь. Ј-4jUi « Aj. , ,
- ь& г «t /
т&
i --SS-isig b .v., .-2: /f
Jl
Фиг. 2
| УСТРОЙСТВО для ИЗМЕРЕНИЯ мощности | 0 |
|
SU299750A1 |
