Изобретение относится к строительной технике и может быть использовано при возведении фундаментов и оснований строительных конструкций.
Целью изобретения является повышение эффективности и экономичности работы молота за счет устранения трудоемких операций при переводе работы молота без его перестановки из режима погружения в режим извлечения и обратно.
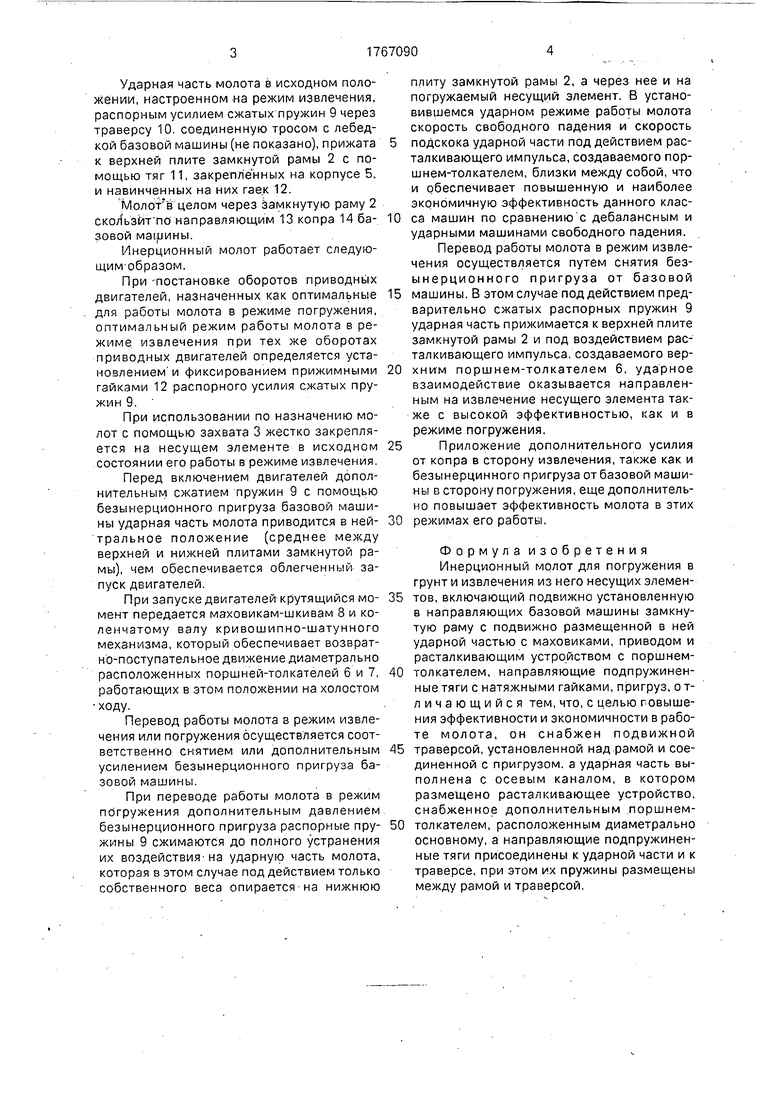
На фиг. 1 изображена принципиальная схема молота, настроенного на работу в режиме из влечения; на фиг. 2 -тоже, в режиме погружен ия.
Молот состо чт из массивной ударной части, перемещающейся в направляющих 1 облегченной жесткой рамы 2, с одной стороны которой смонтирован захват 3, жестко соединяющий молот с погружаемым или извлекаемым несущим элементом, а с другой стороны тяга 4 для подвески молота на копре базовой машины (не показано).
Ударная часть состоит из монолитного корпуса 5 с размещенным в нем в осевом канале расталкивающим устройством с двумя диаметрально противоположно расположенными поршнями-толкателями 6 и 7, выполненным в виде кривошипно-ш.зтунного механизма с коленчатым валом и маховиками-шкивами 8, приводимыми во вращение клиноременной или цепной передачэй, двигателями, расположенными на корпусе 5 ударной части или замкнутой раме 2 (не показано).
VI о
о о о
Ударная часть молота в исходном положении, настроенном на режим извлечения, распорным усилием сжатых пружин 9 через траверсу 10 соединенную тросом с лебедкой базовой машины (не показано), прижата к верхней плите замкнутой рамы 2 с помощью тяг 11, закреплённых на корпусе 5, и навинченных на них гаек 12.
Молотгв целом через замкнутую раму 2 скоЛьзйт по направляющим 13 копра 14 ба- зовой машины.
Инерционный молот работает следующим образом.
При -постановке оборотов приводных двигателей, назначенных как оптимальные для работы молота в режиме погружения, оптимальный режим работы молота в режиме извлечения при тех же оборотах приводных двигателей определяется установлением и фиксированием прижимными гайками 12 распорного усилия сжатых пружин 9.
При использовании по назначению молот с помощью захвата 3 жестко закрепляется на несущем элементе в исходном состоянии его работы в режиме извлечения
Перед включением двигателей дополнительным сжатием пружин 9 с помощью безынерционного пригруза базовой машины ударная часть молота приводится в ней- тральное положение (среднее между верхней и нижней плитами замкнутой рамы), чем обеспечивается облегченный запуск двигателей
При запуске двигателей крутящийся мо- мент передается маховикам-шкивам 8 и коленчатому валу кривошипно-шатунного механизма, который обеспечивает возвратно-поступательное движение диаметрально расположенных поршней-толкателей 6 и 7, работающих в этом положении на холостом ходу.
Перевод работы молота з режим извлечения или погружения осуществляется соответственно снятием или дополнительным усилением безынерционного пригруза базовой машины
При переводе работы молота в режим погружения дополнительным давлением безынерционного пригруза распорные пру- жины 9 сжимаются до полного устранения их воздействия на ударную часть молота, которая в этом случае под действием только собственного веса опирается на нижнюю
плиту замкнутой рамы 2, а через нее и на погружаемый несущий элемент. В установившемся ударном режиме работы молота скорость свободного падения и скорость подскока ударной части под действием расталкивающего импульса, создаваемого поршнем-толкателем, близки между собой, что и обеспечивает повышенную и наиболее экономичную эффективность данного класса машин по сравнению с дебалансным и ударными машинами свободного падения.
Перевод работы молота в режим извлечения осуществляется путем снятия безынерционного пригруза от базовой машины. В этом случае под действием предварительно сжатых распорных пружин 9 ударная часть прижимается к верхней плите замкнутой рамы 2 и под воздействием расталкивающего импульса, создаваемого верхним поршнем-толкателем 6, ударное взаимодействие оказывается направленным на извлечение несущего элемента также с высокой эффективностью, как и в режиме погружения.
Приложение дополнительного усилия от копра в сторону извлечения, также как и безынерцинного пригруза от базовой машины в сторону погружения, еще дополнительно повышает эффективность молота в этих режимах его работы.
Формула изобретения Инерционный молот для погружения в грунт и извлечения из него несущих элементов, включающий подвижно установленную в направляющих базовой машины замкнутую раму с подвижно размещенной в ней ударной частью с маховиками, приводом и расталкивающим устройством с поршнем- толкателем, направляющие подпружиненные тяги с натяжными гайками, пригруз, о т- личающийся тем, что, с целью говыше- ния эффективности и экономичности в работе молота, он снабжен подвижной траверсой, установленной над рамой и соединенной с пригрузом. а ударная часть выполнена с осевым каналом, в котором размещено расталкивающее устройство, снабженное дополнительным поршнем- толкателем, расположенным диаметрально основному, а направляющие подпружиненные тяги присоединены к ударной части и к траверсе, при этом их пружины размещены между рамой и траверсой.
г. /
У i r-W&n-H
Л 1 fr
/i ii Нчс i 1 ЬУ Ип
I--,- 4vS
1йН
; i t
1 b$
L.V: 11 N ч
I jtVV4- x. Ч4 II fi tvS 3-,-s л- P I ч
HJ
r ic
-2 /
u
TFT/y r7
Фиг. 2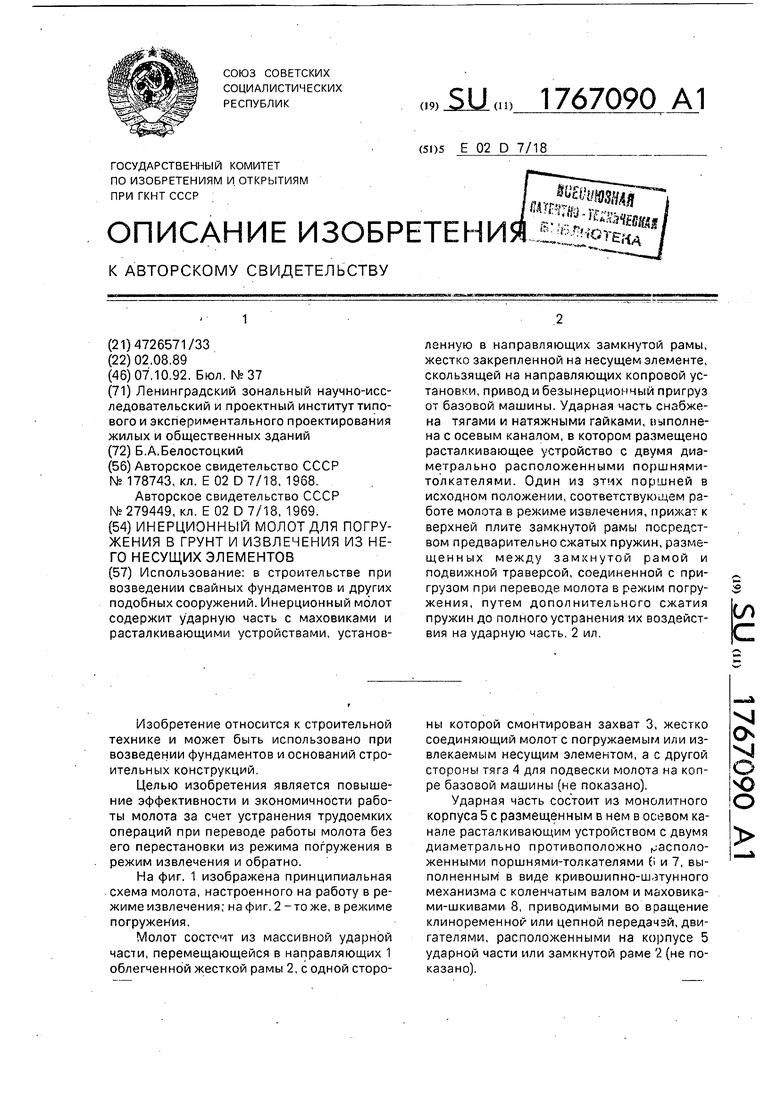
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОМОЛОТ ДЛЯ ПОГРУЖЕНИЯ НЕСУЩИХ ЭЛЕМЕНТОВ | 1970 |
|
SU279449A1 |
| МОЛОТ ДЛЯ ЗАБИВКИ СВАЙ | 1973 |
|
SU379739A1 |
| СПОСОБ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2233961C2 |
| ВИБРОМОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ, ШПУНТА и т. п. | 1968 |
|
SU210002A1 |
| Устройство для погружения и извлечения свай | 1977 |
|
SU742532A1 |
| Устройство для образования скважин в грунте | 1989 |
|
SU1647115A1 |
| УСТАНОВКА ДЛЯ ПОГРУЖЕНИЯ И ИЗВЛЕЧЕНИЯ СВАЙ ИЛИ ШПУНТА | 2001 |
|
RU2188276C1 |
| Установка для образования скважинВ гРуНТЕ | 1979 |
|
SU846668A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1996 |
|
RU2106246C1 |
| Копровое оборудование | 1977 |
|
SU729309A1 |
Использование: в строительстве при возведении свайных фундаментов и других подобных сооружений. Инерционный молот содержит ударную часть с маховиками и расталкивающими устройствами, установленную в направляющих замкнутой рамы, жестко закрепленной на несущем элементе, скользящей на направляющих копровой установки, привод и безынерционный пригруз от базовой машины. Ударная часть снабжена тягами и натяжными гайками, ныполне- на с осевым каналом, в котором размещено расталкивающее устройство с двумя диаметрально расположенными поршнями- толкателями. Один из этих поршней в исходном положении, соответствующем работе молота в режиме извлечения, прижат к верхней плите замкнутой рамы посредством предварительно сжатых пружин, разме- щенных между замкнутой рамой и подвижной траверсой, соединенной с при- грузом при переводе молота в режим погружения, путем дополнительного сжатия пружин до полного устранения их воздействия на ударную часть. 2 ил. (Л
| 0 |
|
SU178743A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ВИБРОМОЛОТ ДЛЯ ПОГРУЖЕНИЯ НЕСУЩИХ ЭЛЕМЕНТОВ | 0 |
|
SU279449A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
