1
(21)4849336/28 (22) 10.07.90 (46)07.10.92. Бюл. Мг 37
(71)Научно-производственное объединение Атомкотломаш
(72)Н. А. Лопаткин
(56)1. Авторское свидетельство СССР № 2162282, кл. G 01 В 7/12, 1966.
2. Авторское свидетельство СССР №916969, кл. G 01 В 7/12, 1981.
(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ОТВЕРСТИЙ
(57)Изобретение относится к контрольно- измерительной технике и может быть использовано в различных отраслях промышленности, в частности в атомном
машиностроении и котлостроении для контроля отверстий и степени развальцовки турбинных досок теплообменных аппаратов. Цель изобретения - повышение информативности. Новым в устройстве является наличие узла фиксации конца развальцованной и начала неразвальнован- ной частей трубы, первая оптопара которого выдает сигнал на окончание развальцованной части, вторая оптопара - на начало неразвальцованной части, затем сумматоры вычисляют максимальную и минимальную раздачи трубы. Компараторами производится выявление выхода за допуск раздачи за пределами трубы и затем включение соответствующей сигнализации на блоках индикации. 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕТАНА И ДРУГИХ ГОРЮЧИХ ГАЗОВ | 1991 |
|
RU2013565C1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2579343C1 |
| Устройство для контроля параметров | 1985 |
|
SU1291930A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ДИНАМОМЕТРИЧЕСКИМ КЛЮЧОМ С ГИРОСКОПИЧЕСКИМ ДАТЧИКОМ УГЛА ПОВОРОТА, УСТАНОВЛЕННЫМ В КОРПУСЕ КЛЮЧА И ДИНАМОМЕТРИЧЕСКИЙ КЛЮЧ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2598974C1 |
| Устройство для допускового контроля амплитудно-частотной характеристики четырехполюсников | 1989 |
|
SU1608591A1 |
| СПОСОБ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И ДИНАМОМЕТРИЧЕСКИЙ КЛЮЧ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2621363C1 |
| Устройство для регистрации параметров двухполюсников | 1981 |
|
SU945829A1 |
| СТЕНД КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА ПНЕВМАТИЧЕСКИХ ГАЙКОВЕРТОВ | 2014 |
|
RU2552870C1 |
| Устройство для измерения расстояния между растениями и подсчета их количества | 1990 |
|
SU1810744A1 |


Изобретение относится к области контрольно-измерительной технике, а именно к приборам контроля диаметров глубоких отверстий, и может быть использовано в различных отраслях энергетического машиностроения, например, для контроля отверстий и степени развальцовки трубных досок теплообменных аппаратов.
Известно устройство контроля отверстий малых диаметров, содержащее датчик (измерительную головку для измерения диаметров, кинематически связанную с датчиком линейных перемещений), подключенный (через блок согласования) к блоку амплитудных измерений, содержащим две ячейки памяти (блок управления, имеющий кнопку ПУСК и две ячейки памяти), в которых фиксируется максимальное и минимальное значение диаметра, суммаSw
fe
тор, вычисляющий максимальную разность этих сигналов и блок индикации 1.
В устройстве отсутствует возможность сравнения измеренных результатов с допуском, отсутствует и возможность определения степени резвальцовки.
Известно также устройство, содержащее измерительную головку, связанный с ней датчик перемещения, четыре ячейки памяти, сумматор, блок задания допусков, компаратор и блок индикации 2.
Известное устройство обеспечивает лишь единичное измерение и оценку результатов при измерении диаметра в одном сечении по глубине отверстия, что требует от оператора дальнейшего непрерывного сравнения этих показателей с заданными при перемещении датчика по всей глубине измеряемого отверстия.
V|
О
VJ со
Ю
N
Целью изобретения является повышение информативности за счет определения степени развальцозки.
Поставленная цель достигается тем, что устройство для контроля параметров отверстий, содержащее измерительную головку, связанный с ней датчик перемещения, четыре ячейки памяти, сумматор, блок задания допусков, компаратор и блок индикации, снабжено узлом фиксации конца развальцованной и начала неразвал ьцованной части трубы, выполненным в виде подпружинен- ного.штока и двух onfonaf), расположенных на расстоянии, соответствующем зоне пе- реход а от неразвальцованнЪй к развальцованной части трубы, причем измерительная головка установлена на штанге, продольная ось которой параллельна оси подпружиненного штока, блоком управления, вторым сумматором, двумя компараторами, вторым блоком индикации и кнопкой Пуск, выходы каждой оптопары датчика перемещения и кнопки Пуск соединены соответственно с четырьмя входами блока управления, ячейки памяти подключены к четырем выходам блока управления, пятый выход которого соединен с управляющими входами блок о в индикации, выход первой ячейки памяти подключен к шестому входу блока управления и суммирующему входу первого сумматора, выход второй ячейки памяти подключен к седьмому входу блока управления, суммирующему входу второго сумматора и первому входу первого сумматора, выход третьей ячейки памяти подключен к восьмому входу блока управления и объединенным вычитающим входам второго и третьего сумматоров, выход четвертой ячейки памяти подключен к девятому входу блока управления и второму входу первого компаратора, выход первого сумматора соединен с первым входом второго блока индикации и первым входом второго компаратора, выход второго сумматора соединен с первым входом третьего компаратора и вторым входом первого блока индикации, выход первого компаратора соединен с первым входом первого блока индикации, вторые входы второго и третьего компараторов соединены с соответствующими выходами блока задания допусков, а выходы второго и третьего компараторов соединены с соответствующими входами первого блока индикации.
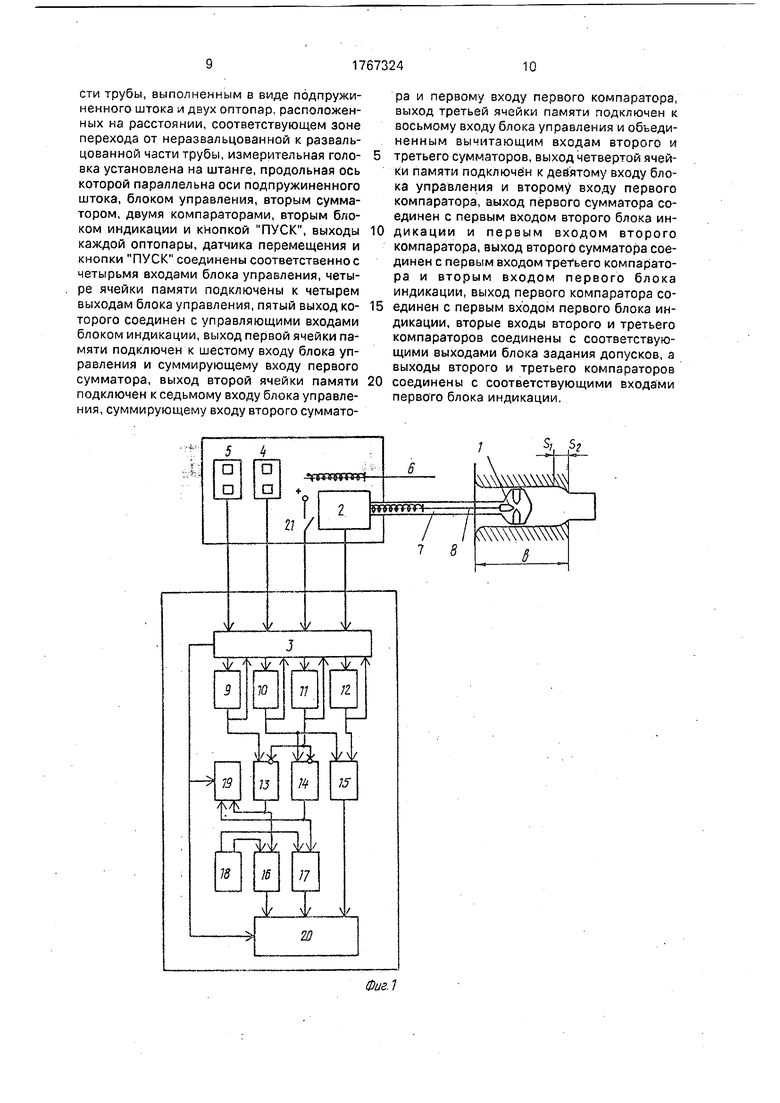
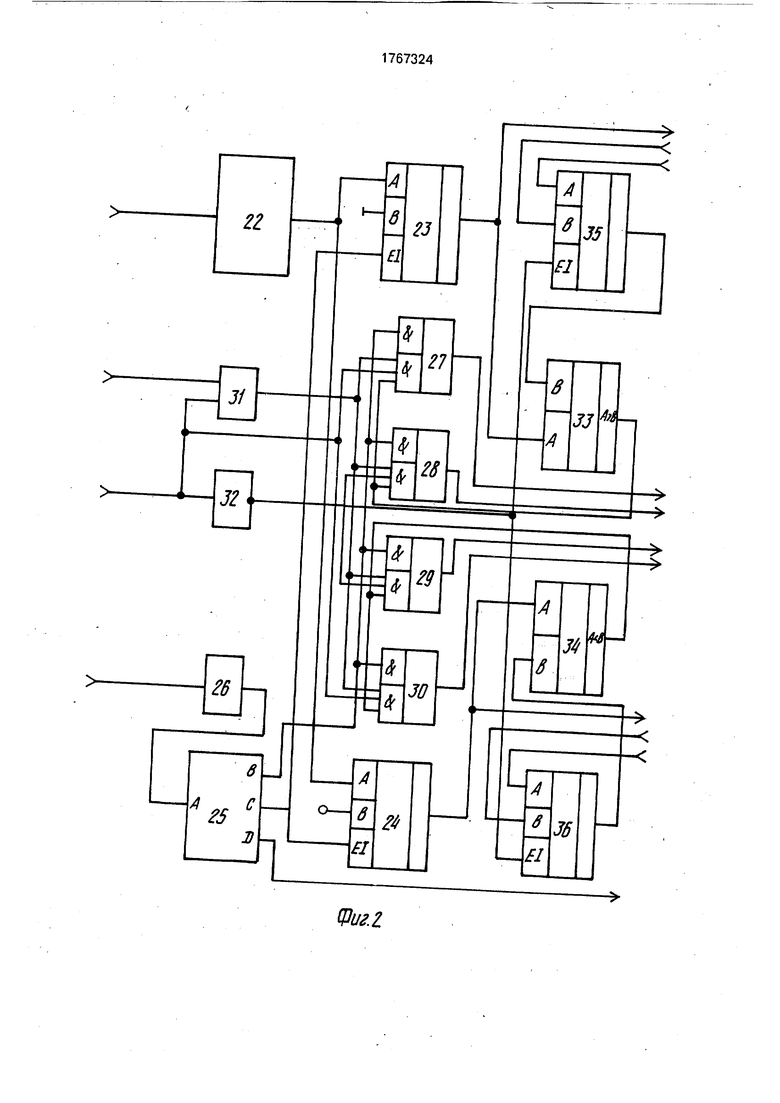
На фиг. 1 избражена структурная схема предлагаемого устройства; на фиг. 2 - алгоритм работы блока управления; на фиг. 3 - блок-схема устройства; на фиг. 4 - временная диаграмма формирователя импульсов.
Устройство содержит измерительную головку 1 для измерения диаметров, кинематически связанную с датчиком 2 линейных перемещений, подключенному через 5 согласующий блок (на черт, не показано) к первому входу устройства 3 управления.
Устройство для контроля диаметров малых отверстий и степени развальцовки снабжено двумя оптопарами 4, 5 и подпру0 жиненным подвижным штоком 6, причем две оптопары 4, 5 расположены на траектории перемещения штока б на расстоянии друг от друга, определяемой зоной перехода от неразвальцованной части трубы к раз5 вальцованной (Si 82), составляющей обычно 6-8 мм. Шток 6 и оптопары 4, 5 образуют узел фиксации конца развальцованной и начала неразвальцованной частей трубы. При конкретном выполнении устройства датчик
0 2 линейных перемещений может быть запрессован в корпусе (на черт, не показаны), выполненном в виде ручки пистолета и полой штанги 7, на конце которой размещена измерительная головка 1. В качестве датчи5 ка 1 линейных перемещений может быть избран датчик модели Микрон-2 и его подвижную головку (на черт, не показано), располагают посередине штанги 7, причем подвижная головка датчика 2 кинематиче0 ски соединена с измерительной головкой 1 посредством передаточного штока 8. Подвижный шток 6 закреплен в корпусе параллельно полой штанге 7, например, при помощи втулок. Длина полой штанги выби5 рается из условия обеспечения возможности прохождения в процессе измерения отверстия по всей глубине доски и 50 - 60 мм за пределами трубной доски, При этом полая штанги 7 может быть выполнена на0 пример, сменной, длина которой определяется типоразмером трубной доски (аналогично сменным выполняется и передаточный шток).
Длина подвижного штока 6 выбирается
5 из условия обеспечения выработки сигнала первой оптопарой 4 при достижении измерительной головкой 1 конца развальцованной части и т. о. длина подвижного штока, выходящего за лицевую поверхность корпу0 са меньше длины части полой штанги, выступающей за лицевую поверхность корпуса на ширину В трубной доски за вычетом зоны перехода от неразвальцованной части трубы к развальцованной (StSa).
5 Кроме того, оптопары в корпусе размещают из условия обеспечения прохождения штоком 6 50 - 60 мм по срабатывании второй оптопары, например, на расстоянии не менее 50 - 60 мм от задней стенки корпуса (с
целью измерения диаметра неразвальцованной части). Оптопары могут быть собраны, например, на светодиодах АЛ 107. В устройстве имеется кнопка Пуск, например, ПМ-1, размещенная, на корпусе, и связанная со вторым i входом блока управления. Выходы первой 4 и второй 5 оптопары подключены соответственно ко второму и третьему входам блока 3 управления, первый-четвертый выходы которого поданы к ячейкам 9-12 памяти, управляющие входы и выходы которых связаны с блоком 3 управления и, кроме того, выход первой ячейки 9 памяти подключен к суммирующему входу первого сумматора 13, выход второй ячейки 10 памяти - к суммирующему входу второго сумматора 14, компаратора 15. Выход третьей дополнительной ячейки подключен к вычитающим входам первого 13 и второго 14 сумматоров, четвертой ячейки памяти 12-го второму входу первого компаратора 15. На первые входы второго компаратора 16 и третьего компаратора 17 поданы соответственно первый и второй выходы блока 18 допусков, Вторые входы компаратора 16, 17 связаны соответственно с первым 13 и вторым 14 суматорами и, кроме того, с входами первого блока 19 индикации, выходы компараторов 15, 16, 17 поданы на соответствующие входы второго блока 20 индикации, причем управляющие входы блоков 19, 20 индикации связаны с управляющими входами блока 3 управления.
В качестве датчика 2 линейных перемещений можТю использовать растровый датчик, например модели 19000.
Блок 3 управления содержит схему 22 согласования с датчиком линейных перемещений, вход которого соединен с выходом датчика 2 линейных перемещений, а выход соединен со входами А цифровых коммутаторов 23, 24. Вход В цифрового коммутатора 23 соединен с общим проводом, а вход В цифрового коммутатора 24 соединен с шиной питания. Входы управления цифровых коммутаторов 23 и 24 соединены с выходом с формирователя импульсов 25. Вход формирователя 25 импульсов через инвертор 26 соединен с кнопкой 21 ПУСК, выход В формирователя импульсов 25 соединен с первыми входами схем ИЛИ 27, 28, 29, 30, а выход D формирователя 25 импульсов соединен с входом Запись схем 19, 20 индикации. Вторые входы схем ИЛИ 27 -30 состоят из трех входных схем И. Первые входы схем 27 - 30 И соединены с выходом схемы Исключающее ИЛИ 31 входы которой соединены с выходами оптопар 4 и 5. Вторые входы схем И 27 и 30 соединены с выходом оптопары 5, а вторые входы И 28,
29 соединены через инвертор 32 с выходом оптопары 5.
Третьи входы схем И 27 и 28 соединены с выходом цифрового компаратора 33, а
третьи входы схем И 29 и 30 - соединены с выходом цифрового компаратора 34.
Выходы схем ИЛИ 27 - 30 соединены с управляющими входами ячеек памяти 9 - 12.
0 Выход цифрового коммутатора 23 соединен с входом А цифрового компаратора и с информационными входами ячеек 9 и 12 памяти, а выход цифрового коммутатора 24 соединен с входом А цифрового компарато5 ра 34 с информационными входами ячеек памяти 10, 11. Вход В цифрового компаратора 33 соединен с выходом цифрового ком- мутатора 35, входы А и В которого соединены с выходами ячеек памяти 9 и 12
0 соответственно. Вход В цифрового компаратора 34 соединен с выходом цифрового коммутатора 36, входы А и В которого соединены с выходами ячеек памяти 10 и 11 соответственно. Управляющие входы циф5 ровых коммутаторов 35 и 36 через инвертор 2 соединены с выходом оптопары 5.
Блок 3 управления может быть реализован на микросхемах 561 серии.
При использовании индукционного дат0 чика схема 22 согласования состоит из фазового детектора.
При использовании растрового датчика схема 22 согласования состоит из реверсивных счетчиков и схемы определения направ5 ления.
Работу устройства поясняет алгоритм, приведенный на черт 2.
Устройство работает следующим образом.
0Предварительно оператор устанавливает заданные значения допусков на блоке 18 допусков. После введения измерительной головки датчика 2 линейных перемещений в измеряемое отверстие оператор нажимает
5 кнопку ПУСК.
Нажатием кнопки включается устройство (4) на входе блока управления формируется импульс А, разрешающий процесс измерения (см. фиг. 4).
0 Процесс измерения начинается с подготовки ячеек памяти 9-12. Подготовка заключается в записи О в ячейки хранения максимальных значений (ячейки 9, 11) и записи 1 в ячейки хранения минимальных
5 значений (ячейки 10, 12) импульсами В и С (фиг. 4).
Затем начинается процесс выделения максимальных и минимальных значений диаметра в ячейки 9, 10. Процесс выделения экстремальных значений происходит следующим образом: текущее значение диаметра, считанное с датчика 2 линейных перемещений и преобразованное в цифровой код посредством согласующего блока, блоком управления сравнивается с содержимым ячейки памяти 9.
Если измеренное значение больше содержимого ячейки памяти 9, то это значение заносится в ячейку памяти 9, если меньше или равно, то содержимое ячейки не изме- няется, далее измеренное значение сравнивается с содержимым ячейки памяти 10. Если измеренное значение меньше содержимого ячейки памяти 10, то оно заносится в ячейку памяти 10 если больше или равно - содержимое ячейки памяти не изменяется.
Далее считывается очередное текущее значение диаметра и процесс выделения экстремума повторяется.
Процесс выделения максимального и минимального значения диаметра в ячейки памяти 9, 10 происходит до тех пор, пока не сработает концевой выключатель 4,
Длина подвижного штока 6 выбирается такой, чтобы датчик 4 сработал при дости- жении измерительной головки конца развальцованной части (сечение 1, фиг. 1).
При срабатывании первого концевого выключателя 4 блок 3 управления прекращает процесс выделения экстремальных значений диаметра и переходит в режим ожидания.
Режим ожидания продолжается по срабатывании концевого выключателя 5,
После срабатывания концевого выклю- чателя 5, начинается процесс измерения ди- аметра неразвальцованной части и занесения максимального и минимального значения диаметра соответственно в ячейки 12и11.
По достижении измерительной головки .конца измеряемого отверстия, ручной измерительный инструмент поворачивается на 90° и вынимается из измеряемого отверстия. При этом происходит процесс измере- ния диаметра отверстия в другой плоскости. Процесс измерения повторяется в обратном порядке, т. е, вначале измеряется диаметр неразвальцованной части до тех пор, пока не включится концевой выключатель 5, блок управления переходит в режим ожидания, который продолжается до выключения концевого выключателя 4, а затем происходит измерение развальцованной части.
При достижении измерительной голо- вки 1 начала трубы, оператор опускает кнопку ПУСК и процесс измерения оканчивается.
В ячейках памяти фиксируются результаты:
9ячейка - Dmax
10ячейка - Dmin развальцованной части
11ячейка - dmax
12ячейка -dmin неразвальцованной части Эти значения поступают на сумматор и
компараторы, где происходит анализ качества развальцовки в соответствии с ГОСТом.
Анализ происходит следующим образом:
Сумматор 13 вычисляет максимальную раздачу трубы.
Сумматор 14 вычисляет минимальную раздачу трубы,
Amln Dmin dmin
Вычисление значения Лпах и Лып сравниваются компараторами 16 и 17с допустимыми значениями, выделяемыми блоком задания допусков.
Если получение значения Лпах и Лып выходят за пределы допусков включается соответствующая сигнализация блока 20 индикации.
Компаратор 15 сравнивает значение dmax и Dtnin при dmax Dmin имеет место раздача трубы за пределами трубной доски, и выключается соответствующая световая сигнализация (ячейка индикации 20).
Для визуального контроля развальцовки вычисленные значения Лпах и Лып выводятся на цифровые индикаторы блока 19 индикации. Результаты измерения заносятся в 19, 20 импульсов Д (см. фиг. 4),
Устройство можно использовать для измерения диаметра отверстия при сверлении и сравнения его с допуском. Для этого подвижный шток 6 фиксируют, задавая тем самым глубину погружения, а на блоке 18 задатчиков допусков устанавливают максимально допустимый диамбтр отверстия,
Таким образом предложенное устройство обладает более широкими функциональными возможностями, т. к, позволяет контролировать не только величину изменения диаметра от максимума до минимума, но и выявить соответствие допуску, определить степень развальцовки.
Формула изобретения Устройство для контроля параметров отверстий, содержащее измерительную головку, связанный с ней датчик перемещения, четыре ячейки памяти, сумматор, блок задания допусков, компаратор и блок индикации, отличающееся тем, что, с целью повышения информативности за счет определения степени развальцовки отверстия, оно снабжено узлом фиксации конца развальцовки и начала неразвальцованной части трубы, выполненным в виде подпружиненного штока и двух оптопар. расположенных на расстоянии, соответствующем зоне перехода от неразвальцованной к развальцованной части трубы, измерительная головка установлена на штанге, продольная ось которой параллельна оси подпружиненного штока, блоком управления, вторым сумматором, двумя компараторами, вторым блоком индикации и кнопкой ПУСК, выходы каждой оптопары, датчика перемещения и кнопки ПУСК соединены соответственное четырьмя входами блока управления, четыре ячейки памяти подключены к четырем выходам блока управления, пятый выход которого соединен с управляющими входами блоком индикации, выход первой ячейки памяти подключен к шестому входу блока управления и суммирующему входу первого сумматора, выход второй ячейки памяти подключен к седьмому входу блока управления, суммирующему входу второго сумматора и первому входу первого компаратора, выход третьей ячейки памяти подключен к восьмому входу блока управления и объединенным вычитающим входам второго и
третьего сумматоров, выход четвертой ячейки памяти подключён к девятому входу блока управления и второму входу первого компаратора, выход первого сумматора соединен с первым входом второго блока индикации и первым входом второго компаратора, выход второго сумматора соединен с первым входом третье го компаратора и вторым входом первого блока индикации, выход первого компаратора соединен с первым входом первого блока индикации, вторые входы второго и третьего компараторов соединены с соответствующими выходами блока задания допусков, а выходы второго и третьего компараторов
соединены с соответствующими входами первого блока индикации.
Фиг. 2.
Aw
см ) tI
П
i i I
I I i i i I
JI
IT
Фиг. 4
