Изобретение относится к области электронной весоизмерительной техники и может быть использовано для быстрого и высокоточного взвешивания грузов в условиях динамических и случайных помех, сопутствующих нагружению платформенных весов, уменьшению массы груза в дозирующих весах при расфасовывании, перемещению грузов различного рода подъемными механизмами и одновременном их взвешивании, например, крановыми, монорельсовыми и другими весами.
Известен класс [1-6] электронных весоизмерителей, основанных на использовании силоизмерительных датчиков, которые в статических условиях обладают высокой точностью, но в динамических условиях взвешивания имеют большие ошибки. Известны [7] способы определения веса груза в динамических условиях, когда показания силоизмерительных датчиков фильтруют, статистически обрабатывают, но и они не обеспечивают необходимой точности определения веса груза, требуют большого интервала времени измерений, существенно ограничивают интенсивность погрузочно-разгрузочных работ, резко снижают производительность дозирующих весов.
Наиболее близким по целевому назначению и технической сущности к предлагаемому изобретению является способ измерения массы груза [8], который взят в качестве прототипа. В этом способе после нагружения весов производят три последовательных измерения сигнала датчика веса: первое измерение производят в момент достижения измеряемой величиной экстремального значения, а интервалы двух последующих измерений задают относительно момента первого измерения, результаты измерений запоминают, а затем производят вычисление веса груза.
Недостатком этого способа является низкая точность, обусловленная принципиальным допущением о существовании лишь одной низкочастотной гармонической составляющей ошибки взвешивания, когда в общем случае имеются и другие гармонические составляющие, методическая и случайная составляющие ошибки. В связи с этим не представляется возможным точно определить экстремум низкочастотной гармонической составляющей и, как следствие, - точные значения ее амплитуды и круговой частоты, являющихся основой для определения уточняемого веса груза. Поэтому на самом деле по прототипу не представляется возможным исключить все динамические ошибки определения веса, в том числе полностью даже заявленную гармоническую низкочастотную составляющую.
Технический результат изобретения - обеспечение быстрого и высокоточного взвешивания грузов всему множеству типов электронных весоизмерителей, использующих силоизмерительные датчики, и в динамических условиях, а также при наличии случайных помех.
Рассмотрим проблематику точности процесса взвешивания. В статических условиях (фиг. 1), когда ось чувствительности силоизмерительного датчика F0 постоянно строго вертикальна и груз не совершает даже продольных колебаний, вес G груза действительно определяется с высокой степенью точности, поскольку сила веса G - это вектор
G=m•g,
где m - масса груза;
g - вектор ускорения, который в условиях поля земного тяготения направлен вертикально вниз и на поверхности Земли имеет модуль, равный в районе экватора gЭ = 9,78049 м/с2, в районе полюса gП = 9,83235 м/с2,
направленный вертикально вниз
F0•F1+m•g=0,
где F1 - модуль силы, измеренный при этом силоизмерительным датчиком.
Реальный процесс взвешивания и особенно грузов, перемещаемых подъемными механизмами, транспортными средствами, имеет обычно явно выраженный динамический характер, сопровождаемый:
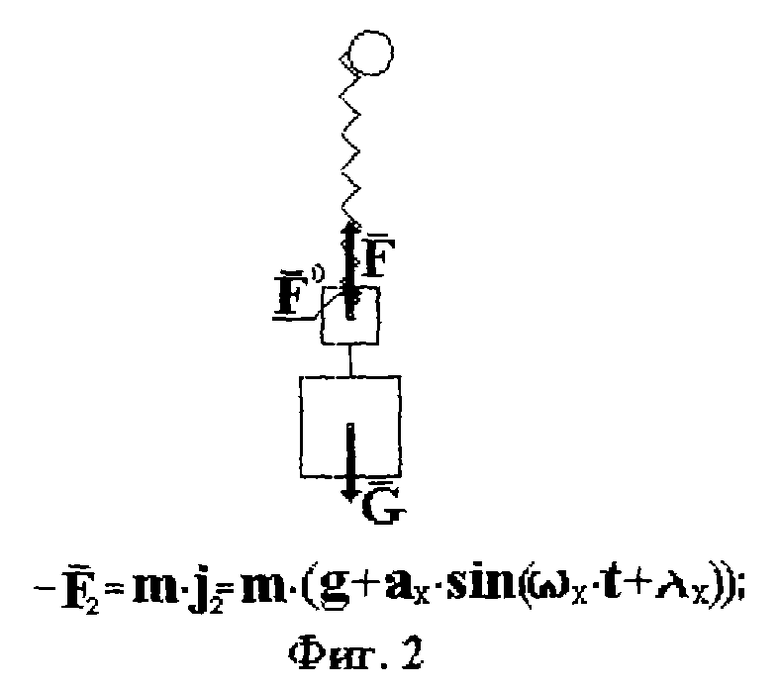
- упругими продольными (фиг. 2) колебаниями, когда
-F0•F2= m•g+m•ax•sin(ωx•t+λx),
где ax,ωx,λx - соответственно, амплитуда, круговая частота и начальная фаза продольных колебаний груза;
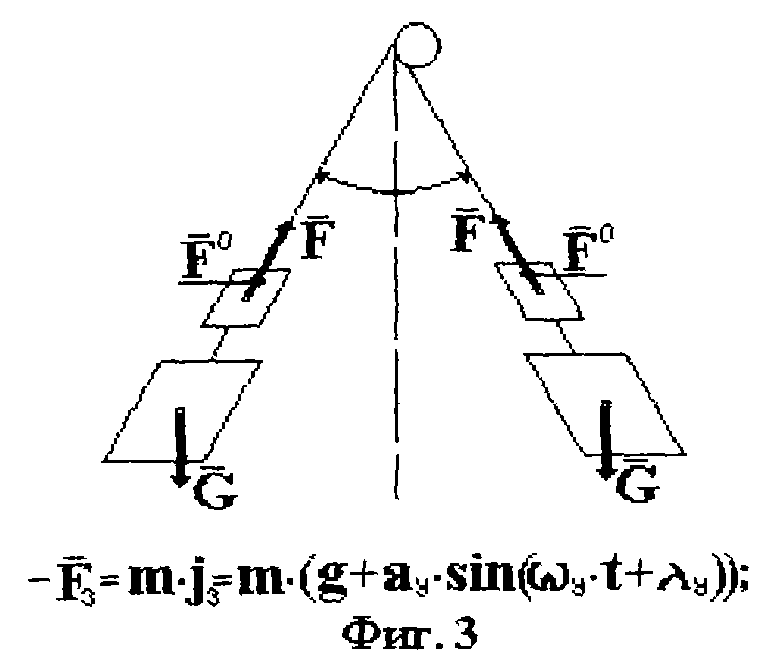
- маятниковыми поперечными (фиг. 3) колебаниями, когда
-F0•F3= m•g+m•ay•sin(ωy•t+λy),
где ay,ωy,λy - соответственно, амплитуда, круговая частота и начальная фаза маятниковых колебаний груза;
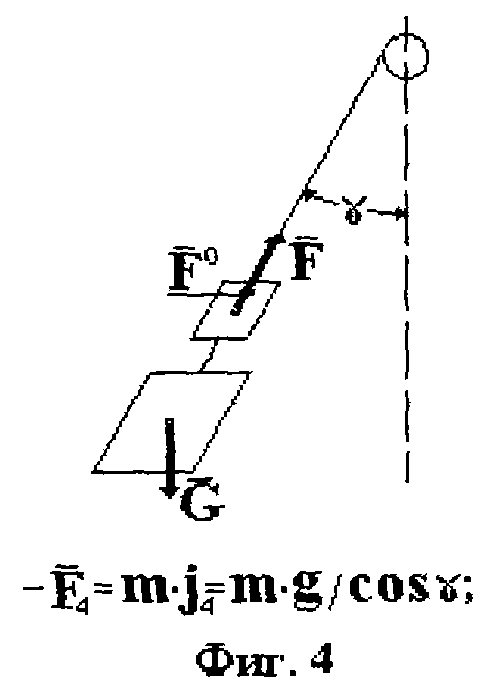
- отклонениями каната с грузом (фиг. 4) от вертикали на некоторый угол γ за счет центробежных сил при вращении стрелы подъемного механизма или(и) поступательного ускоренного движения основания подъемного механизма
-F0•F4= m•g/cosγ,
- различными механическими случайными вибрационными силами ξ.
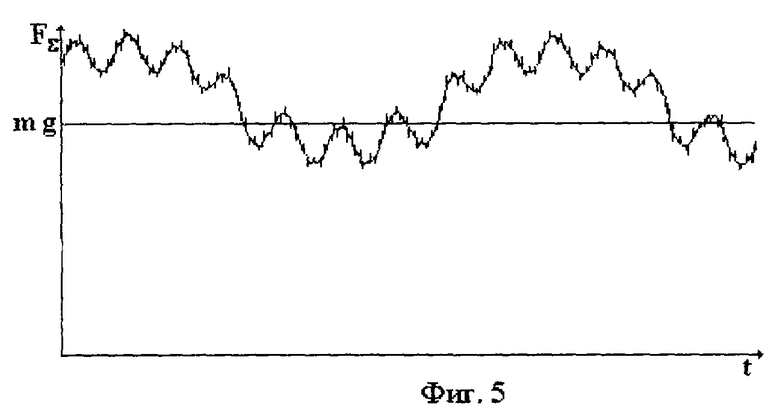
Совокупное влияние указанных факторов приводит к тому, что текущее значение показаний (фиг. 5) силоизмерительного датчика, ориентированного осью чувствительности вдоль грузового каната, равно
и содержит детерминированные методическую (сомножитель 1/cosγ при m•g=G) и гармонические m•ax•sin(ωx•t+λx), m•ay•sin(ωy•t+λy), а также случайную ξ составляющие ошибок определения веса G груза.
Указанный выше технический результат достигается тем, что в способе после нагружения наряду с измерениями сигнала F силоизмерительного датчика веса
дополнительно измеряют линейное ускорение j грузоприемного устройства с помощью акселерометра, установленного осью чувствительности вдоль оси чувствительности силоизмерительного датчика
Производят ряд i, где 1<i≤n, измерений сигналов обоих датчиков при взвешивании одного и того же груза, синхронно преобразуют эти сигналы в цифровую форму и одновременно делят сигнал Fi на сигнал ji. Полученное действительное значение массы
mi=Fi/ji (3)
груза умножают на соответствующее данной местности земного шара по долготе значение ускорения земного тяготения gм и получают ряд i последовательных значений веса Gмi груза для данной местности
Gмi=mi•gм. (4)
Суммируют значения веса Gмi груза, полученную сумму ΣGмi делят на количество выполненных отсчетов n и получают уточненное среднестатистическое значение взвешиваемого груза
Gм= (ΣGмi)/n, (5)
свободное от случайных помех ξ.
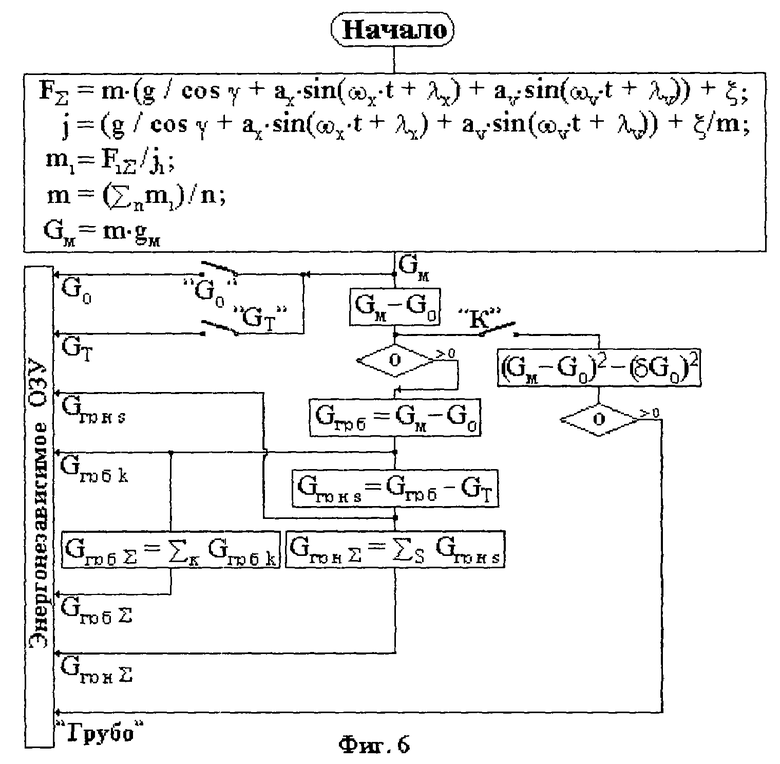
Вес G0 грузоприемного устройства (узла захвата груза, платформы весов,.. .) определяют по формулам (1) - (5) и соответствующим им алгоритмам (фиг. 6) при порожних взвешенных весах, нажимая на пульте управления кнопки "Взвешивание" и "G0" и запоминают полученное значение G0 в энергонезависимом многооперандном запоминающем устройстве.
Вес Gгр.б. брутто-груза определяют при взвешенных весах с брутто-грузом, нажимая на пульте управления кнопку "Взвешивание", из вычисленного по (1) - (5) значения веса GмБ вычитают значение веса G0 грузоприемного устройства и полученный результат Gгр.б запоминают в энергонезависимом многооперандном запоминающем устройстве.
Вес GТ тары определяют при взвешенных весах, нагруженных только тарой, нажимая на пульте управления кнопки "Взвешивание" и "GТ", из вычисленного по (1) - (5) значения веса Gмт вычитают значение веса G0 грузоприемного устройства и полученный результат GТ запоминают в энергонезависимом многооперандном запоминающем устройстве.
Вес нетто-груза Gгр.н определяют при взвешенных весах, нажимая на пульте управления кнопку "Взвешивание", из вычисленного по (1) - (5) значения веса Gмн вычитают значения веса GТ тары и веса G0 грузоприемного устройства и полученный результат Gгр.н. запоминают в энергонезависимом многооперандном запоминающем устройстве.
Суммарное значение Gгр.б.Σ всех K, где 1<k≤K, взвешиваемых брутто-грузов Gгр.б.k определяют методом последовательного их суммирования
Gгр.б.Σ = ΣGгр.б.k (6)
и полученный результат суммирования запоминают в энергонезависимом многооперандном запоминающем устройстве.
Суммарное значение Gгр.н.Σ всех S, где 1<s≤S, взвешиваемых нетто-грузов Gгр.н.s определяют методом их последовательного суммирования
Gгр.н.Σ = ΣGгр.н.s (7)
и полученный результат суммирования запоминают в энергонезависимом многооперандном запоминающем устройстве.
Текущие результаты взвешиваний выводят на блок индикации, запомненные результаты используют для документирования, анализа и оценки выполненных работ.
Операцию сопутствующего автоконтроля выполняют при каждом порожнем взвешенном состоянии весов, для чего на пульте управления нажимают кнопки "Взвешивание" и "Контроль". При этом сравнивают (фиг. 6) текущее измеренное значение веса GОИ грузоприемного устройства с его запомненным значением G0 и, если квадрат разности (GОИ-G0)2 превышает квадрат заданного значения допуска (δG0)2:
(Gои-Go)2> (δGo)2, (8)
то индицируют грубость процесса взвешивания и принимают соответствующие меры поверки и настройки весов.
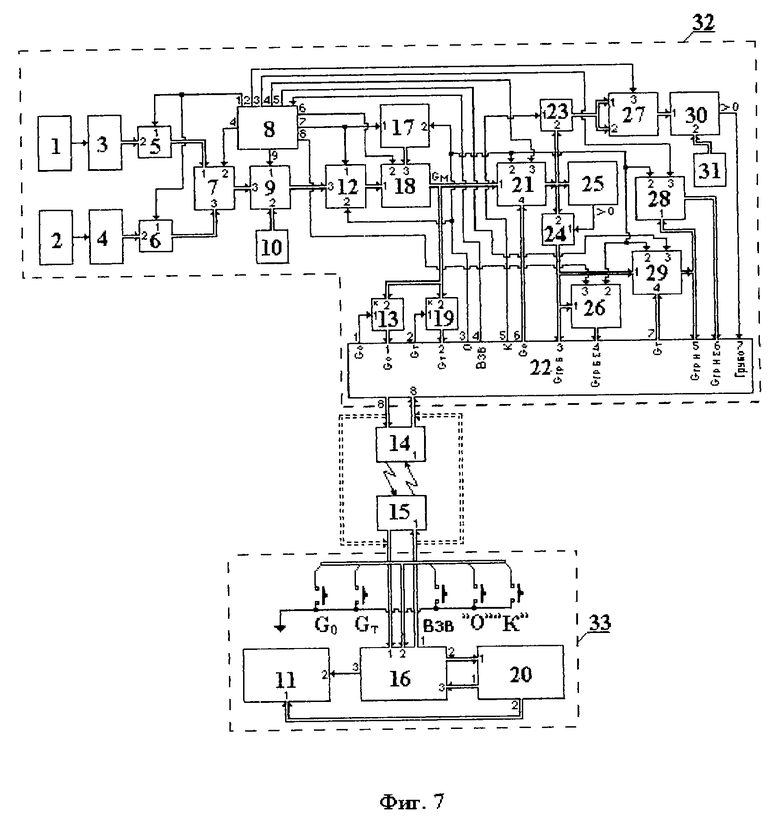
На фиг. 7 представлена схема устройства, реализующего изложенный способ. Устройство по отношению к прототипу:
- упрощено за счет исключения автокомпенсатора следящего уравновешивания, триггера знака, реверсивного счетчика, генератора импульсов времени, делителя частоты, формирователя сигналов управления, программируемой логической матрицы, однооперандного оперативного запоминающего устройства, логической схемы с входящими в нее Т-триггером, двумя схемами И и схемой ИЛИ;
- наращено введением датчиков линейных ускорений 2, двух аналого-цифровых преобразователей 3 и 4, двух энергонезависимых многооперандных запоминающих устройств 22 и 20, управляемого генератора-синхронизатора 8 вместо обычного генератора импульсов времени, двух делителей 7 и 18, двух умножителей 9 и 27, пяти сумматоров 12, 21, 26, 28 и 29, двоичного счетчика 17, двух компараторов 25 и 30, дополнительно четырех многоразрядных ключей 13, 19, 23 и 24, двух задатчиков 10 и 31 параметров, пульта функционального управления и индикации 33, двух телеметрических приемопередатчиков 14 и 15;
- сохранило в своем составе силоизмерительные датчики 1, два многоразрядных ключа 5 и 6, микропроцессор 16, блок индикации 11.
Силоизмерительные датчики 1 веса выходом подключены ко входу первого аналого-цифрового преобразователя 3, разрядные выходы которого подсоединены ко вторым информационным входам первого многоразрядного ключа 5. Датчики линейных ускорений 2 выходом подключены ко входу второго аналого-цифрового преобразователя 4, разрядные выходы которого подсоединены ко вторым информационным входам второго многоразрядного ключа 6. Оба многоразрядных ключа 5 и 6 первыми управляющими входами связаны с первым управляющим выходом управляемого генератора-синхронизатора 8, а разрядными выходами соответственно подключены к первому (делимое) и третьему (делитель) входам первого делителя 7. Управляемый генератор-сихронизатор 8 обеспечивает процесс синхронного функционирования измерительно-вычислительного модуля 32 весов и для этого он соединен входом - с четвертым выходом первого энергонезависимого многооперандного запоминающего устройства 22, вторым выходом - с третьим управляющим входом второго умножителя 27, третьим выходом - с третьим управляющим входом четвертого сумматора 28, четвертым выходом - с третьим управляющим входом второго сумматора 21, пятым выходом - с третьим управляющим входом пятого сумматора 29, шестым выходом - со вторым управляющим входом второго делителя 18, седьмым выходом одновременно - с первым счетным входом двоичного счетчика 17 и первым управляющим входом первого сумматора 12, восьмым выходом - с третьим управляющим входом третьего сумматора 26, девятым выходом - с первым управляющим входом первого умножителя 9, десятым выходом - со вторым управляющим входом первого делителя 7.
Первый делитель 7 выходом связан с третьим входом первого умножителя 9. Первый умножитель 9 подсоединен вторым входом к выходу первого задатчика 10 параметра, а выходом - к третьему входу первого сумматора 12. Первый сумматор 12 выходом подключен к первому входу второго делителя 18. Второй делитель 18 третьим входом связан с разрядным выходом двоичного счетчика 17, а выходом соединен одновременно с первым входом второго сумматора 21 и вторыми информационными входами третьего 13 и четвертого 19 многоразрядных ключей. Третий и четвертый многоразрядные ключи 13, 19 информационными выходами подключены соответственно к первому и второму входам первого энергонезависимого многооперандного запоминающего устройства 22, а управляющими первыми входами - к его первому и второму управляющим выходам. Второй сумматор 21 четвертым входом связан с шестым информационным выходом первого энергонезависимого многооперандного запоминающего устройства 22, а выходом подключен одновременно ко входу первого компаратора 25 и ко вторым информационным входам пятого 23 и шестого 24 многоразрядных ключей. Пятый многоразрядный ключ 23 первым управляющим входом соединен с пятым управляющим выходом первого энергонезависимого многооперандного запоминающего устройства 22, а выходом подключен одновременно к первому и второму входам второго умножителя 27. Шестой многоразрядный ключ 24 первым управляющим входом подсоединен к положительному выходу первого компаратора 25, а выходом связан одновременно с третьим информационным входом первого энергонезависимого многооперандного запоминающего устройства 22 и первыми входами третьего 26 и пятого 29 сумматоров. Третий сумматор 26 выходом соединен с четвертым информационным входом первого энергонезависимого многооперандного запоминающего устройства 22. Пятый сумматор 29 четвертым входом подключен к седьмому информационному выходу первого энергонезависимого многооперандного запоминающего устройства 22, а выходом одновременно к первому входу четвертого сумматора 28 и пятому информационному входу первого энергонезависимого многооперандного запоминающего устройства 22. Четвертый сумматор 28 выходом подсоединен к шестому информационному входу первого энергонезависимого многооперандного запоминающего устройства 22. Второй компаратор 30 первым информационным входом связан с выходом второго умножителя 27, вторым информационным входом с выходом задатчика 31 параметра, а положительным выходом - с седьмым входом первого энергонезависимого многооперандного запоминающего устройства 22. Третий управляющий выход первого энергонезависимого многооперандного запоминающего устройства 22 соединен с обнуляющими вторыми входами первого 12, второго 21, третьего 26, четвертого 28, пятого 29 сумматоров и двоичного счетчика 17.
Измерительно-вычислительный модуль 32 весов сопрягается с пультом функционального управления и индикации 33 весов двунаправленным каналом телеметрической связи. Первый телеметрический приемопередатчик 14 соединен входом с восьмым выходом первого энергонезависимого многооперандного запоминающего устройства 22, а выходом с его восьмым входом. Второй телеметрический приемопередатчик 15 подсоединен к пульту функционального управления и индикации 33 весов, а именно первым выходом к первому входу микропроцессора 16, первым входом к первому выходу микропроцессора 16. Первый 14 и второй 15 телеметрические приемопередатчики связаны между собой либо эфиром в оптическом или радиодиапазонах, либо проводной (кабель, витая пара), либо волоконнооптической линией с использованием интерфейса, например, типа RS-485.
Второе энергонезависимое многооперандное запоминающее устройство 20 подключено первым информационным входом ко второму выходу микропроцессора 16, вторым выходом к первому входу индикатора 11, первым выходом к третьему входу микропроцессора 16. Третий выход микропроцессора 16 соединен со вторым входом индикатора 11.
Выходы кнопок "G0", "GТ", "Взвешивание", "Обнуление", "Контроль" пульта 33 функционального управления и индикации связаны со вторым информационным входом микропроцессора 16 и через него через телеметрический канал восьмым входом первого энергонезависимого многооперандного запоминающего устройства 22 с измерительно- вычислительным модулем 32 весов.
Функционирование устройства, в котором реализован предлагаемый массометрический способ, происходит следующим образом.
После нагружения и разаретирования платформенных весов, после отрыва груза от исходной площадки крановыми весами на выходе их силоизмерительных датчиков 1 появляется электрический сигнал F, пропорциональный весу груза (1) с наложенными на него динамическими и случайными помехами (фиг. 5). Этот сигнал аналого-цифровым преобразователем 3 превращается в последовательность многоразрядных двоичных чисел, которые поступают на информационный вход первого многоразрядного ключа 5. Одновременно на выходе датчиков 2 линейных ускорений (акселерометров), установленных осями чувствительности параллельно осям чувствительности соответствующих силоизмерительных датчиков 1, образуется электрический сигнал (2), пропорциональный линейному ускорению j грузоприемного устройства с грузом. Этот сигнал вторым аналого-цифровым преобразователем 4 также превращается в последовательность многоразрядных двоичных чисел, которые поступают на информационный вход второго многоразрядного ключа 6. Оба многоразрядных ключа 5 и 6 открываются одновременно, поскольку на их первые управляющие входы от генератора-синхронизатора 8 поступает единый синхроимпульс. Мгновенное цифровое значение показаний силоизмерительных датчиков Fi поступает на первый вход делителя 7 в качестве делимого, мгновенное цифровое значение показаний акселерометров ji подается синхронно на третий вход этого же делителя 7 в качестве делителя. Частное от деления на выходе первого делителя 7 представляет собой мгновенное значение массы совокупного груза mi= FiΣ/ji без динамических ошибок, которое подается на третий вход первого умножителя 9, где умножается на местное значение ускорения земного тяготения gм, вводимое на второй вход первого умножителя 9 в качестве сомножителя с выхода первого задатчика 10 параметра. Полученное мгновенное значение веса совокупного груза mi•gм = Gмi поступает на третий вход первого сумматора 12. Описанные измерения и вычисления производятся по (1) - (5) под управлением синхроимпульсов работающего генератора-синхронизатора, то есть когда оператор нажатием кнопки "Взвешивание" на пульте 33 функционального управления и индикации весов подал через микропроцессор 16, телеметрический канал 15 и 14, восьмой вход первого энергонезависимого многооперандного запоминающего устройства 22, через его четвертый выход сигнал на включение генератора-синхронизатора 8. При нажатой кнопке "Взвешивание" производится i циклов (1≤i≤n) измерений Fi, ji, вычислений mi, Gмi, суммирований ΣnGмi и подсчет в двоичном счетчике 17 значения n. На первый вход второго делителя 18 в качестве делимого с выхода первого сумматора поступает сумма ΣnGмi, на третий вход в качестве делителя - значение n с выхода двоичного счетчика 17. На выходе второго делителя 18 таким образом получается среднестатистическая оценка Gм= (ΣnGмi)/n совокупного взвешиваемого груза Gм. Этот сигнал поступает одновременно на первый вход второго сумматора 21 и на вторые информационные входы третьего 13 и четвертого 19 многоразрядных ключей. При порожних взвешенных весах и нажатых кнопках "G0" и "Bзв." вычисленное значение веса проходит через открывшийся многоразрядный ключ 13 на первый информационный вход первого энергонезависимого многооперандного запоминающего устройства 22 и там запоминается в качестве веса грузоприемного устройства G0. При наличии на взвешенных весах только тары и нажатых кнопках "GТ" и "Bзв." полученное значение Gмт проходит через открывшийся многоразрядный ключ 19 на второй информационный вход первого энергонезависимого многооперандного запоминающего устройства 22 и там запоминается в качестве веса тары GТ. Во втором сумматоре 21 из значения Gмт вычитается запомненная величина G0 и разность (Gмт-G0) с выхода этого сумматора поступает одновременно на вторые информационные входы пятого 23 и шестого 24 многоразрядных ключей, а также на вход первого компаратора 25. На положительном выходе первого компаратора 25 при выполнении условия (Gм-G0)>0 появляется сигнал, открывающий шестой многоразрядный ключ 24, и полученная величина (Gм-G0) поступает на входы третьего 26 и пятого 29 сумматоров, а также через третий информационный вход заносится в память первого энергонезависимого многооперандного запоминающего устройства 22 как вес брутто-груза Gгр.б= Gм - G0. В третьем сумматоре 26 к предыдущим добавляется текущий вес брутто-груза Gгр.б.k и полученная сумма Gгр.б.Σ = ΣGгр.б.k при (1<k≤K) через четвертый информационный вход заносится в память первого энергонезависимого многооперандного запоминающего устройства 22. В пятом сумматоре 29 из значения Gгр.б вычитается поступающая с седьмого информационного выхода первого энергонезависимого многооперандного запоминающего устройства 22 запомненная величина GТ и разность (Gгр.б-Gт) с выхода этого сумматора в качестве нетто-груза Gгр.н поступает на вход четвертого сумматора 28 и на пятый информационный вход первого энергонезависимого многооперандного запоминающего устройства 22 для запоминания. В четвертом сумматоре 28 к предыдущим добавляется текущий вес Gгр.н.s нетто-груза и полученная сумма Gгр.н.Σ = ΣSGгр.н.s при (1<s≤S) через шестой информационный вход заносится в память первого энергонезависимого многооперандного запоминающего устройства 22.
При выполнении операции сопутствующего автоконтроля на пульте функционального управления и индикации 33 при порожнем взвешенном состоянии весов наряду с нажатием кнопки "Взвешивание" замыкают кнопку "Контроль". Сигнал от кнопки "Контроль", как и от других управляющих кнопок, проходит через микропроцессор 16, телеметрический канал 15 и 14 и заносится в первое энергонезависимое многооперандное запоминающее устройство 22 через его восьмой вход. Сигнал "Контроль" с пятого выхода первого энергонезависимого многооперандного запоминающего устройства 22 поступает на управляющий вход пятого многоразрядного ключа 23 и открывает его. При этом разность (GОИ-G0), где GОИ - текущее измеренное значение веса порожних весов, направляется на оба информационных входа второго умножителя 27, то есть она возводится в квадрат (GОИ-G0)2. Далее во втором компараторе 30 происходит сравнение значения квадрата разности (GОИ-G0)2, поступающего на его первый вход, с квадратом допуска (δGo)2, вводимого с задатчика 31 параметра на его третий вход, и, если квадрат разности (GОИ-G0)2 превышает квадрат допуска (δGo)2, то с положительного выхода второго компаратора 30 на седьмой вход первого энергонезависимого многооперандного запоминающего устройства 22 следует сигнал "Грубо", который, как и все другие сигналы и массивы, получаемые в измерительно-вычислительном модуле 32 весов, следует в пульт функционального управления и индикации 33 через восьмой информационный выход первого энергонезависимого многооперандного запоминающего устройства 22, через телеметрический канал 14 и 15 на первый информационный вход микропроцессора 16 и далее со второго выхода микропроцессора 16 - на первый вход второго энергонезависимого многооперандного запоминающего устройства 20 для документирования и передачи со второго выхода на первый вход индикатора 11. При этом с третьего выхода микропроцессора 16 на второй вход индикатора 11 следует управляющий сигнал для визуализации оператору всей полученной информации, в том числе и слова "Грубо". Нажатие на пульте функционального управления и индикации 33 кнопки "Обнуление" приводит к появлению соответственно на третьем выходе первого энергонезависимого многооперандного запоминающего устройства 22 сигнала, который обнуляет, то есть приводит перед работой весов в исходное состояние через вторые обнуляющие входы первый 12, второй 21, третий 26, четвертый 28, пятый 29 сумматоры и двоичный счетчик 17. Весы готовы к производству очередной серии взвешиваний.
Источники информации
1. Платформенные весы врезные типа ВП1, ВП2, ВП5, технические описания, АО "Тензо-М", 1998.
2. Платформенные весы для взвешивания скота типа ВП-ХХСК, технические описания, АО "Тензо-М", 1998.
3. Платформенные передвижные весы типа ВПА, технические описания, АО "Тензо-М", 1998.
4. Крановые весы типа ВК, техническое описание, АО "Тензо-М", 1998.
5. Автомобильные весы типа ВА, технические описания, АО "Тензо-М", 1998.
6. Вагонные весы типа РД, РД-Д, технические описания, АО "Тензо-М", 1998.
7. Современное состояние и тенденции развития крановых весов. Обзорная информация. М., ЦНИИТЭИприборостроения, 1979.
8. SU 1742631 A1, 23.06.92.
Изобретение относится к электронной весоизмерительной технике и предназначено для быстрого и высокоточного взвешивания грузов в условиях динамических помех при нагружении платформенных весов, в дозирующих весах при расфасовывании, при перемещении грузов различными подъемными механизмами и одновременном их взвешивании крановыми, монорельсовыми и другими весами. В процессе взвешивания измеряют силу веса силоизмерительными датчиками. Дополнительно измеряют линейные ускорения грузоприемного устройства акселерометрами, установленными осями чувствительности вдоль осей чувствительности силоизмерительных датчиков. Синхронно преобразуют оба сигнала в цифровую форму. Одновременно делят первый сигнал на второй для получения действительного значения массы груза без динамических ошибок. Полученное значение массы умножают на присущее данному месту земного шара ускорение земного тяготения и определяют вес груза. Технический результат - повышение точности взвешивания в условиях динамических помех. 2 с.п.ф-лы, 7 ил.
| Способ измерения массы груза | 1990 |
|
SU1742631A1 |
| Устройство для взвешивания | 1989 |
|
SU1737279A1 |
| Устройство для регистрации веса в динамике | 1983 |
|
SU1153239A1 |
| US 4677579 A1, 30.06.1987 | |||
| US 7505749 A, 14.06.1988 | |||
| СПОСОБ ТЕРМОУМЯГЧЕНИЯ ВОДЫ | 1993 |
|
RU2115630C1 |

