Изобретение относится к измерительной технике и может быть использовано для измерения линейных перемещений объектов, например инструмента станочного оборудования, схвата робота и т. д.
Известен оптический датчик перемещений, содержащий разветвленный световод, источник и приемник светового излучения, а также регистратор отраженного от объекта измерения светового излучения.
Недостатком данного оптического датчика является относительно низкая точность, обусловленная влиянием на результаты измерения, изменений отражательной способности объекта измерения и степени прозрачности чувствительной поверхности световода (оптических шумов), а также температурного дрейфа источника и приемника светового излучения.
Известен также оптический датчик перемещений, который содержит светопрово- дящую систему с одним излучающим световодом и двумя приемными световодами, источник света, фотоприемник, диффе- (/) ренциальный усилитель и регистратор.f
В данном устройстве частичная компен- сация влияния оптических шумов и темпера- Z турного дрейфа достигается за счет избыточного (эталонного) оптического канала и дифференциальной обработки сигна- | лов. Однако, в данном случае не ч исключается отрицательное влияние на точ- О ность измерения неравномерности отража- VJ тельной способности объекта измерения и Јд) -неидентичности измерительного и эталон- KJN ного оптических каналов.wj
Наиболее близким техническим реше- нием к предлагаемому является оптический Y. датчик перемещений, содержащий свето- проводящую систему, выполненную в виде - разветвленного световода, источник света, фотоприемник, оптически связанный с источником света через светопроводящую систему, блок выборки-хранения, информационным входом соединенный с выходом фотоприемника, и регистратор.
Благодаря использованию одного измерительного опт веского канала и автоматической регулировки яркости источника светового излучения в соответствии с изменением отражтательной способности объекта измерения и температурного дрейфа устраняются недостатки, связанные с неравномерностью отражательной способности объекта измерения и температурного дрейфа. К основным недостаткам данного устройства следует отнести дополнительные погрешности, связанные с его калибровкой (автоматической регулировкой) на нелинейном участке (максимуме) с низкой крутизной статической характеристики, зависимости динамической погрешности от степени периодичности перемещений объекта измерений, а также обусловленные требованием периодичности перемещения (вибрации) объекта измерения сужения функциональных возможностей, т. е. невозможность измерять однократные перемещения объекта измерения, например схвата робота.
Целью изобретения являются повышение точности и расширение области применения оптического датчика перемещений.
Поставленная цель достигается тем, что в устройство, содержащее светопроводя- щую систему, выполненную в виде разветвленного световода, источник света, фотоприемник, оптически связанный с источником света через светопроводящую систему, блок-выборки хранения, информационным входом соединенный с выходом фотоприемника, и регистратор, дополнительно введены тактильный преобразователь, формирующий сигнал управления при приближении объекта измерения к чувствительной поверхности светопроводящей системы на заданном расстоянии, выход которого соединен с управляющим входом блока выборки-хранения, дифференциальный усилитель одним из своих входом, под- ключенный к выходу фотоприемника, вторым входом к выходу блока выборки-хранения, а выходом к входу регистратора.
Сущность изобретения заключается в том, что введение тактильного пребразова- теля и дифференциального усилителя обес- печивает повышение точности и расширение области применения за счет калибровки датчика на линейном участке статической характеристики, нечувствительности канала калибровки к оптическим шумам, температурному дрейфу и степени периодичности перемещения объекта измерения вплоть до измерения однократных перемещений.
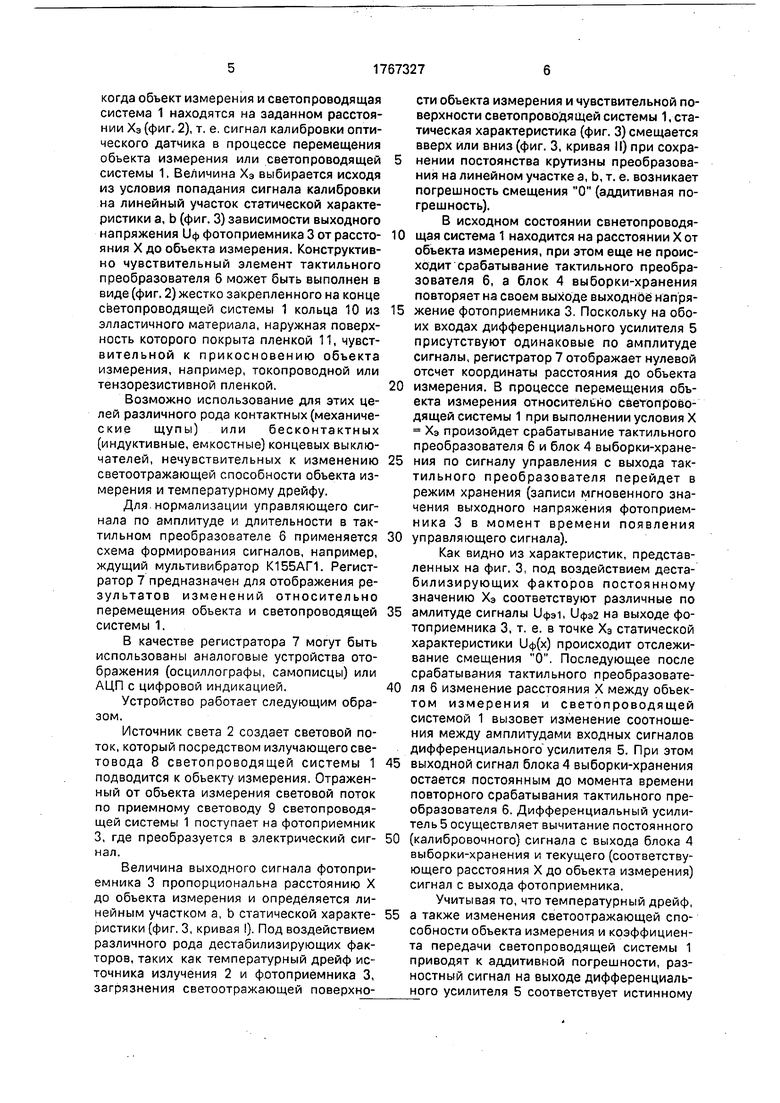
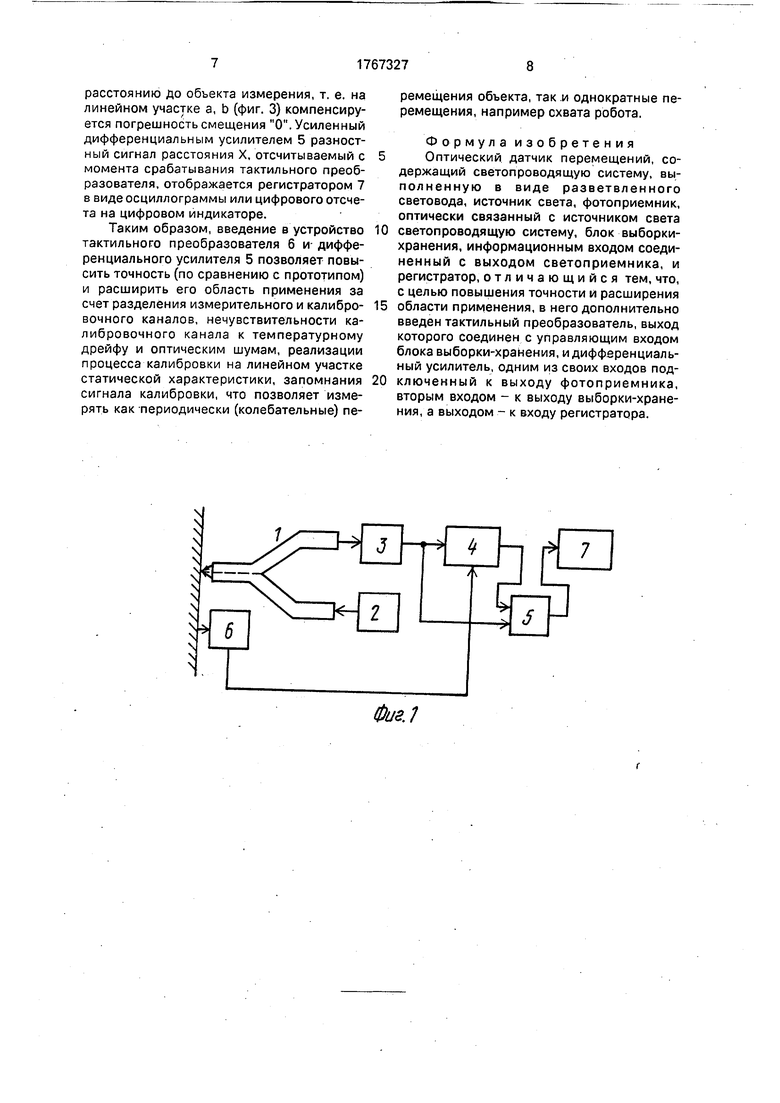
На фиг. 1 представлена блок-схема предлагаемого оптического датчика перемещений; на фиг. 1 - вариант возможной реализации тактильного преобразования;
5 на фиг. 3 - диаграмма, поясняющая принцип действия оптического датчика перемещений.
Предлагаемое устройство содержит светопроводящую систему 1, выплненную в
0 виде разветвленного световода, оптически связывающего источник света 2, объект измерения и фотоприемник 3, выход которого подключен к информационному входу блока 4 выборки-хранения и одному из входов
5 дифференциального усилителя 5; другой из входов дифференциального усилителя 5 соединен с выходом блока 4 выборки-хранения, вход управления которого связан с выходом тактильного преобразователя 6, а
0 выход дифференциального усилителя 5 соединен с входом регистратора 7.
Функции, выполнямые каждым из элементов устройства следующие: светопрово- дящэя система 1 выполнена в виде
5 разветвленного световода (фиг. 2), содержащего излучающий световод 8, по которому световой поток от источника 2 поступает к объекту измерения (на фиг. 1, 2 обозначен штриховкой). Отраженный от объекта изме0 рения световой поток воспринимается приемным световодом 9 и подается на фотоприемник 3.
В качестве источника 2 светового излучения могут быть использованы лампа нака5 ливания, светодиод или лазер. Фотоприемник 3 преобразует оптическое излучение в электрический сигнал, В качестве фотоприемника 3 могут быть использова- ны фотодиоды, фототранзисторы и
0 фотосопротивления.
Блок 4 выборки-хранения предназначен для реализации режима выборки (при отсутствии сигнала управления), когда сигнал на его выходе повторяет сигнал на ин5 формационном входе, а также режима хранения, характеризующегося запоминанием мгновенного значения данного входного сигнала в момент времени появления управляющего сигнала на управляющем
0 входе блока 4. Блок 4 выборки-хранения может быть выполнен на основе использования стандартных схем типа КР 1100 СК 2 или АЦП-ЦАП.
Дифференциальный усилитель 5 пред5 ставляет собой усилитель разностного аналогового сигнала, например стандартный операционный усилитель типа К140УД17.
Основной функцией тактильного преобразователя 6 является формирование управляющего сигнала в момент времени,
когда объект измерения и светопроводящая система 1 находятся на заданном расстоянии Хэ (фиг. 2), т, е. сигнал калибровки оптического датчика в процессе перемещения обьекта измерения или светопроводящей системы 1. Величина Хэ выбирается исходя из условия попадания сигнала калибровки на линейный участок статической характеристики а, Ь (фиг. 3) зависимости выходного напряжения Оф фотоприемника 3 от расстояния X до объекта измерения. Конструктивно чувствительный элемент тактильного преобразователя 6 может быть выполнен в виде (фиг. 2) жестко закрепленного на конце светопроводящей системы 1 кольца 10 из элластичного материала, наружная поверхность которого покрыта пленкой 11, чувствительной к прикосновению объекта измерения, например, токопроводной или тензорезистивной пленкой.
Возможно использование для этих целей различного рода контактных (механические щупы) или бесконтактных (индуктивные, емкостные) концевых выключателей, нечувствительных к изменению светоотражающей способности объекта измерения и температурному дрейфу.
Для нормализации управляющего сигнала по амплитуде и длительности в тактильном преобразователе б применяется схема формирования сигналов, например, ждущий мультивибратор К155АГ1. Регистратор 7 предназначен для отображения ре- зультатов изменений относительно перемещения объекта и светопроводящей системы 1.
В качестве регистратора 7 могут быть использованы аналоговые устройства отображения (осциллографы, самописцы) или АЦП с цифровой индикацией.
Устройство работает следующим образом.
Источник света 2 создает световой поток, который посредством излучающего световода 8 светопроводящей системы 1 подводится к объекту измерения, Отраженный от объекта измерения световой поток по приемному световоду 9 светопроводящей системы 1 поступает на фотоприемник 3, где преобразуется в электрический сигнал.
Величина выходного сигнала фотоприемника 3 пропорциональна расстоянию X до объекта измерения и определяется линейным участком a, b статической характеристики (фиг, 3, кривая I). Под воздействием различного рода дестабилизирующих факторов, таких как температурный дрейф источника излучения 2 и фотоприемника 3, загрязнения светоотражающей поверхности объекта измерения и чувствительной поверхности светопроводящей системы 1, статическая характеристика (фиг. 3) смещается вверх или вниз (фиг. 3, кривая II) при сохранении постоянства крутизны преобразования на линейном участке а, Ь, т. е. возникает погрешность смещения О (аддитивная погрешность).
В исходном состоянии свнетопроводя0 щая система 1 находится на расстоянии X от объекта измерения, при этом еще не происходит срабатывание тактильного преобразователя 6, а блок 4 выборки-хранения повторяет на своем выходе выходное напря5 жение фотоприемника 3. Поскольку на обоих входах дифференциального усилителя 5 присутствуют одинаковые по амплитуде сигналы, регистратор 7 отображает нулевой отсчет координаты расстояния до объекта
0 измерения. В процессе перемещения объекта измерения относительно светопроводящей системы 1 при выполнении условия X Хэ произойдет срабатывание тактильного преобразователя 6 и блок 4 выборки-хране5 ния по сигналу управления с выхода тактильного преобразователя перейдет в режим хранения (записи мгновенного значения выходного напряжения фотоприемника 3 в момент времени появления
0 управляющего сигнала).
Как видно из характеристик, представленных на фиг, 3, под воздействием дестабилизирующих факторов постоянному значению Хэ соответствуют различные по
5 амлитуде сигналы 11фЭ1, ОфЭ2 на выходе фотоприемника 3, т. е. в точке Хэ статической характеристики иф(х) происходит отслеживание смещения О. Последующее после срабатывания тактильного преобразовате0 ля б изменение расстояния X между объектом измерения и светопроводящей системой 1 вызовет изменение соотношения между амплитудами входных сигналов дифференциального усилителя 5. При этом
5 выходной сигнал блока 4 выборки-хранения остается постоянным до момента времени повторного срабатывания тактильного преобразователя б. Дифференциальный усилитель 5 осуществляет вычитание постоянного
0 (калибровочного) сигнала с выхода блока 4 выборки-хранения и текущего (соответствующего расстояния X до объекта измерения) сигнал с выхода фотоприемника.
Учитывая то, что температурный дрейф,
5 а также изменения светоотражающей способности объекта измерения и коэффициента передачи светопроводящей системы 1 приводят к аддитивной погрешности, разностный сигнал на выходе дифференциаль- ного усилителя 5 соответствует истинному
расстоянию До объекта измерения, т. е. на линейном участке a, b (фиг. 3) компенсируется погрешность смещения О. Усиленный дифференциальным усилителем 5 разностный сигнал расстояния X, отсчитываемый с момента срабатывания тактильного преобразователя, отображается регистратором 7 в виде осциллограммы или цифрового отсчета на цифровом индикаторе.
Таким образом, введение в устройство тактильного преобразователя 6 и- дифференциального усилителя 5 позволяет повысить точность (по сравнению с прототипом) и расширить его область применения за счет разделения измерительного и калибровочного каналов, нечувствительности калибровочного канала к температурному дрейфу и оптическим шумам, реализации процесса калибровки на линейном участке статической характеристики, запомнания сигнала калибровки, что позволяет измерять как периодически (колебательные) перемещения объекта, так и однократные перемещения, например схвата робота.
Формула изобретения
Оптический датчик перемещений, содержащий светопроводящую систему, выполненную в виде разветвленного световода, источник света, фотоприемник, оптически связанный с источником света
светопроводящую систему, блок выборки- хранения, информационным входом соединенный с выходом светоприемника, и регистратор, отличающийся тем, что, с целью повышения точности и расширения
области применения, в него дополнительно введен тактильный преобразователь, выход которого соединен с управляющим входом блока выборки-хранения, и дифференциальный усилитель, одним из своих входов подключенный к выходу фотоприемника, вторым входом - к выходу выборки-хранения, а выходом - к входу регистратора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Оптический датчик перемещений | 1986 |
|
SU1374046A1 |
| Оптический датчик перемещений | 1982 |
|
SU1112228A1 |
| Устройство для измерения импульсных перемещений | 1988 |
|
SU1562706A1 |
| Устройство для дистанционного измеренияТЕМпЕРАТуРы (ЕгО ВАРиАНТы) | 1979 |
|
SU800704A1 |
| ЛАЗЕРНЫЙ ВОЛОКОННЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2129283C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК | 2005 |
|
RU2292525C1 |
| МОРСКОЙ ТУРБИДИМЕТР | 1996 |
|
RU2112232C1 |
| Устройство для измерения обратного рассеяния в световодах | 1980 |
|
SU887968A1 |
| Устройство для измерения смещения объекта | 1985 |
|
SU1259112A1 |
| Двухлучевой логарифмирующий фотометр | 1990 |
|
SU1717969A1 |

Изобретение относится к измерительной технике. Цель изобретения - повышение точности и расширение области применения. Цель достигается введением в структуру датчика тактильного преобразователя и дифференциального усилителя, что позволяет производить калибровку датчика на линейном участке статической характеристики, компенсировать оптические шумы и температурный дрейф, осуществлять измерение как многократных вибрационных, так и однократных перемещений. 3 ил.
ШШ
8
Фиг.2
4
Фцг.З
X
| Авдошин Е | |||
| С | |||
| Волоконная оптика в военной технике США, Зарубежная радиоэлектроника, 1989, № 11, с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Оптический датчик перемещений | 1986 |
|
SU1374046A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
