Изобретение относится к области навигационных систем, а именно к прецизионным гироскопическим датчикам угловых скоростей.
Уровень техники в данной области характеризуется общедоступными сведениями, приведенными ниже. Известен оптический гироскоп с фазовой компенсацией (Патент США N 4299490, 1982 г.), содержащий автономный источник светового излучения, в качестве которого может быть использован, например, лазер. Первый пучок светового излучения расщепляется на второй и третий пучки, которые затем снова соединяются, образуя четвертый пучок. Второй и третий пучки, полученные после расщепления, направляются в противоположные стороны по отношению к оси вращения. В гироскопе предусмотрен фазовый компенсатор, позволяющий изменять величину относительного сдвига фаз между вторым и третьим пучками. С этой целью на пути распространения этих пучков устанавливаются специальные оптические элементы, изменяющие фазу излучения, распространяющегося вдоль этих траекторий, четвертый пучок, полученный в результате соединения второго и третьего, четвертый пучок, полученный в результате соединения второго и третьего, регистрируется детектором излучения, который вырабатывает выходной электрический сигнал, соответствующий относительной фазе двух когерентных пучков, обусловленной вращением объекта относительно заданной оси. Детектор связан с цепью компенсации, предназначенной для поддержания выходного сигнала детектора на нулевом уровне в случае отсутствия вращения, что позволяет однозначно связать величину фазовой компенсации со скоростью вращения.
Недостатком этого устройства является относительно большая величина угловой скорости дрейфа, а также то, что гироскоп может измерять только одну компоненту абсолютной угловой скорости объекта, на котором он установлен.
Известен лазерный волоконный гироскоп (А.с.N 972923 C 01 C 19/64 БИ N 4, 1992), оптически связанный через разделительную пластину и невзаимный элемент с волоконным световодом, фотоприемник, усилитель, регистратор, генератор напряжения, двигатель вращения лазерного гироскопа вокруг оси, перпендикулярной его оси чувствительности, подключенный к генератору опорного напряжения, первый полосовой фильтр, настроенный на частоту вращения гироскопа, и следящая система, выполненная в виде последовательно соединенных второго полосового фильтра, настроенного на частоту генератора опорного напряжения фазового детектора, фильтра низкой частоты, интегратора и регулируемого источника постоянного тока, выход которого соединен с невзаимным элементом, а вход усилителя соединен с входами первого и второго полосовых фильтров, при этом выход первого полосового фильтра соединен с входом регистратора, а частота генератора опорного напряжения равна двойной частоте вращения гироскопа.
Это устройство принимается за прототип. В нем обеспечивается повышение точности измерения параметров вращения устройств (турбин, валов машин и др. ), но только с известным направлением угловой скорости. Поэтому оно не применимо в навигационных системах, где неизвестно направление угловой скорости вращения. При этом нестабильность скорости вращения двигателя увеличивает погрешности измерения угловой скорости.
Задачей предлагаемого изобретения является обеспечение определения знакопеременной информации о двух компонентах угловой скорости объекта и повышение точности ее.
Поставленная задача достигается тем, что в лазерном волоконном датчике угловой скорости, включающем расположенные на подвесе источник лазерного излучения, модулятор, светоделитель, чувствительный элемент в виде многовиткового световода с осью чувствительности, перпендикулярной оси подвеса, фотоприемник, оптически связанный с источником лазерного излучения через чувствительный элемент и светоделитель, усилитель, регистратор, двигатель вращения подвеса и генератор опорного напряжения, введены схема интегрирования, определения фазового угла поворота подвеса и вычитания, поляризатор, размещенный между источником лазерного излучения и модулятором, а генератор опорного напряжения выполнен в виде углового положения оси подвеса, при этом выход регистратора и выход датчика углового положения оси подвеса соединены через токоподводы со схемой интегрирования, определения фазового угла поворота подвеса и вычитания. Кроме того, лазерный волоконный датчик угловой скорости может быть выполнен таким образом, что схема интегрирования, определения фазового угла поворота подвеса и вычитания включает процессорный модуль, устройство формирования векторов прерывания, соответствующих четверти оборота оси подвеса, интегратор и аналого-цифровой преобразователь.
Введение датчика углового положения оси подвеса, выход которого и регистратора соединен через токоподводы со схемой интегрирования, определения фазового угла поворота подвеса и вычитания, позволяет уменьшить погрешности от всех возмущений, частоты изменения которых примерно на порядок меньше частоты вращения двигателя. Информация об измеряемой угловой скорости заключена в интегральной информации от фотоприемника, получаемой за четверть оборота подвеса по сигналам датчика углового положения подвеса. При этом обеспечивается компенсация всех медленных возмущений за счет того, что измеряется угловая скорость объекта и моменты времени, соответствующие их исключению в процессе суммирования и интегральной информации от фотоприемника за разные четверти периода вращения подвеса. Выполнение схемы интегрирования, определения фазового угла поворота полвеса и вычитания в виде процессорного модуля, устройства формирования вектора прерывания, интегратора и аналого-цифрового преобразователя позволяет получить с одного лазерного волоконного ДУСа информацию о двух компонентах угловой скорости объекта.
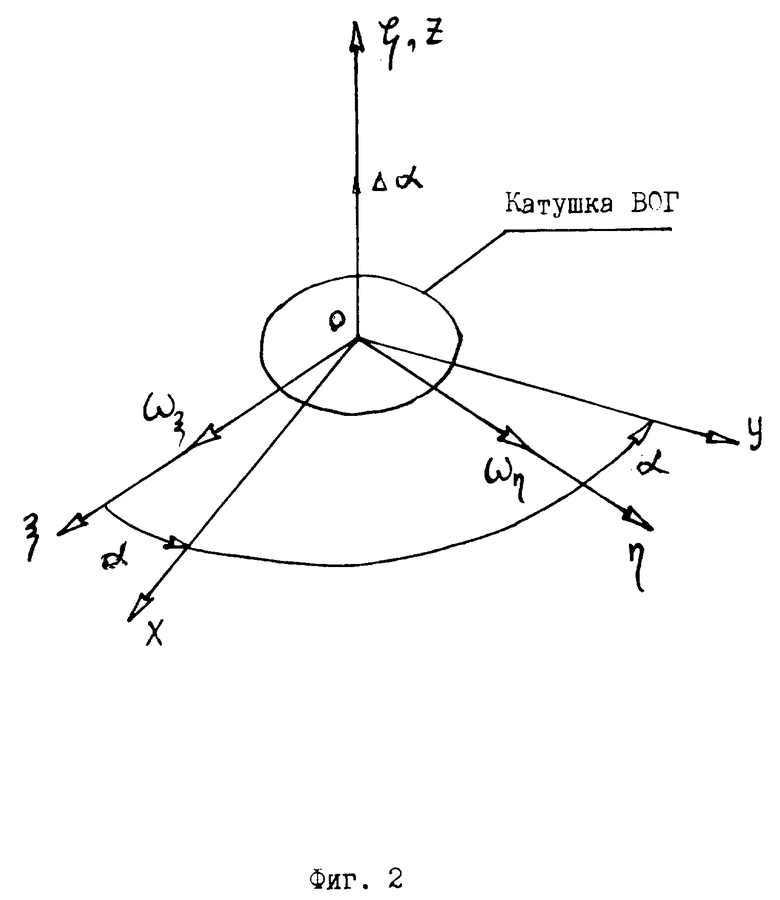
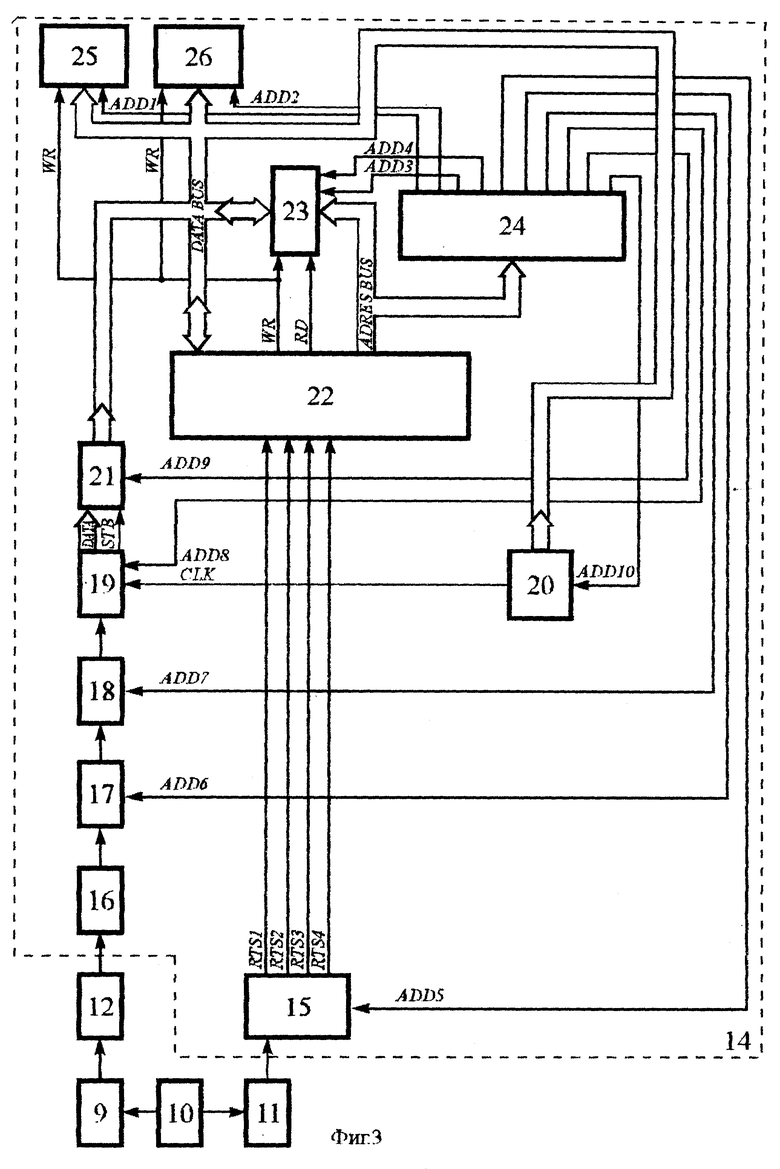
На фиг. 1 изображена схема лазерного волоконного датчика угловой скорости; на фиг. 2 - схема расположения осей систем координат датчика; на фиг. 3 - схема интегрирования, определения фазового угла поворота подвеса и вычитания.
Предлагаемое устройство лазерного волоконного ДУСа (фиг. 1) содержит лазерный источник излучения - 1, светоделитель - 2, поляризатор - 3, второй светоделитель - 4, модулятор - 5, чувствительный элемент - 6, выполненный в виде многовитковой катушки из волоконного световода с измерительной осью, перпендикулярной оси подвеса - 7. Фотоприемник 8 через усилитель подключен к регистрирующему устройству 9. Дус 9 расположен на подвесе 7, имеющем, например, шарикоподшипниковые опоры и двигатель 10, предназначенный для вращения с постоянной скоростью вокруг оси подвеса, перпендикулярный измерительной оси волоконной катушки 6. Между подвесом и корпусом прибора 13 установлен датчик углового положения оси подвеса 11 и токоподводы 12, связывающие элементы, установленные на подвесе, с регистрирующим устройством 9 и со схемой интегрирования, определения фазового угла поворота подвеса и вычитания 14 (фиг. 13).
В состав устройства 14 входят устройство формирования векторов прерывания 15, усилитель 16, интегратор 17, устройство выборки и хранения информации 18, аналого-цифровой преобразователь 19, таймер 20, буферный регистр кода 21, центральный процессор 22, блок памяти 23, дешифратор адреса 24, выходные регистры хранения кода величины угловой скорости по двум компонентам ωξ, ωη 25,26. На фиг. 3 приняты обозначения:
RST - сигналы прерывания,
ADD - адресные сигналы выбора устройства,
WR - сигнал записи,
RD - сигнал чтения.
Выход усилителя 16 соединен с первым входом интегратора 17, второй его вход соединен с шестым выходом дешифратора адреса 24, выход интегратора 17 соединен с первым входом устройства выборки и хранения информации 18, второй его вход соединен с седьмым выходом дешифратора адреса 24 выход устройства 18 соединен с первым входом аналого-цифрового преобразователя 19, второй вход его соединен через таймер 20 с десятым выходом дешифратора адреса 24, а третий вход устройства 19 соединен с восьмым выходом дешифратора 24. Два выхода аналого-цифрового преобразователя 19 соединены с первым и вторым входами буферного регистра кода 21, третий его вход соединен с девятым выходом дешифратора адреса 24. Выход устройства 21 соединен с соответствующими портами таймера 20, центрального процессора 20, блок памяти 23, выходных регистров хранения кода величины угловой скорости по двум компонентам ωξ, ωη 25,26.
Выход датчика углового положения подвеса 11 соединен с первым входом устройства формирования вектора прерывания 15, со вторым входом которого соединен пятый выход дешифратора адреса 24. Четыре выхода устройства 15 соединены с четырьмя входами центрального процессора 22, два его выхода WR и RD соединены со входом блока памяти 23, а также с помощью шин "DATA BUS" - с портами устройств 21, 25, 26, 20. Кроме того, выход центрального процессора через шину "ADRES BUS" соединен с соответствующими портами блока памяти 23 и дешифратора адреса 24.
Лазерный волоконный датчик угловой скорости работает следующим образом. С выхода источника лазерного излучения сигнал поступает на первый светоделитель 2, после которого расщепляется на два луча, вводимых в волоконный контур 6 в противоположных направлениях. Один из лучей распространяется через поляризатор 3 и второй светоделитель 4, модулятор 5, служащий элементом, который вносит "невзаимность" в лучи. Интенсивность интерференционной картины распространяющихся лучей регистрируется фотоприемником 8, сигнал с которого после усиления подается на регистрирующее устройство 9. С помощью двигателя 10 ВОГ вращается в шарикоподшипниковых опорах 7. Одновременно с датчика углового положения оси подвеса 11 снимается сигнал и вместе с сигналом регистратора 9 передается через токоподводы 12 на схему интегрирования, определения фазового угла поворота подвеса и вычитания в виде процессорного модуля 14, где происходит интегрирование по промежуткам времени, сложение сигналов с регистрирующего устройства 9 в моменты времени, определяемые датчиком углового положения подвеса, и выдача выходной информации.
Устройство 14 работает следующим образом. Сигнал угловой скорости с выхода регистратора 9 через токоподводы 12 и усилитель 16 поступает на вход процессорного модуля 14, в состав которого входят блоки 17 и 24, где происходит его интегрирование в течение соответствующих четвертей периода вращения двигателя 10. По сигналам датчика углового положения 11 формируются 1, 2, 3 или 4 импульса, в зависимости от номера четверти периода вращения ДУС, т. е. фазового угла поворота оси подвеса. Момент формирования импульсов соответствует времени перехода угла поворота ДУС с одой четверти в другую. Эти импульсы поступают на вход устройства формирования векторов прерывания 15, на выходе которого формируются сигналы прерывания RST1, RST2, RST3 или RST4, в зависимости от номера четверти периода вращения ВОГ. По этому сигналу центральный процессор 22 переходит на соответствующую подпрограмму обработки сигнала для каждой из четвертей, хранящуюся в блоке памяти 23, в котором кроме этого хранятся необходимые переменные данные.
Под управлением центрального процессора 22 понимаются следующие процессы:
- сигнал, поступающий с интегратора 16, фиксируется в УВК8 под действием сигнала ADD7 на время цикла преобразования АЦП9;
- сигналом ADD6 сбрасывается в "нуль" интегратор 17;
- сигналом ADD5 сбрасывается установленный сигнал прерывания;
- сигналом ADD8 запускается цикл преобразования АЦП9, на тактовый вход которого, кроме этого, поступают импульсы с выхода таймере 20, а сигнал STB переписывает выходные данные в буферный регистр 21;
- сигнал ADD19 позволяет подключить выходы буферного регистра 21 к шине данных процессора;
- сигнал ADD10 включает (выключает) таймер 20 для определения периода вращения двигателя 10;
- под действием сигналов WR, ADD1 и ADD2 выходные данные загружаются в выходные регистры 25 и 26.
Сигналы ADD формируются по адресным сигналам процессора с помощью дешифратора адреса 24.
Кроме перечисленных выше действий, процессор 2 выполняет необходимые вычисления по алгоритму, который выводится ниже.
Алгоритм работы процессора можно пояснить с помощью следующих теоретических выкладок. Пусть лазерный волоконный ДУС имеет следующую схему расположения систем координат (см. фиг. 2);
Oξηζ - объектовая система координат;
OXYZ - система координат, которая вращается вместе с прибором вокруг оси Oζ;
OX - измерительная ось ДУСа.
Для угловой скорости, измеряемой ДУСом, справедлива следующая взаимосвязь с абсолютными угловыми скоростями объекта ωξ и ωη:
ωχ = ωξcosα+ωηsinα+ωдр, (1)
где ωдр - угловая скорость дрейфа.
Интегрируя сигнал на выходе ВОГ, получим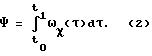
Интегрирование нужно начинать с такого момента, когда начальное условие по углу нулевое. Этот момент t0 определяется процессором 14 по сигналу датчика углового положения подвеса 12.
Для первого полупериода оборота измерительной оси ДУСа имеем:
Прибор вращается с угловой скоростью |α| ≫ |ωξ|, |ωη|. В пределах периода вращения
можно считать
ωx = const, ωh = const, ωдр = const. (5)
При этих условиях интеграл (3) становится табличным и упрощается к виду
Для второго полупериода от Т/2 до Т оборота измерительной оси ДУСа имеем:
После алгебраического сложения выражения (6) и (7) имеем:
ΨI+ΨII = ωдрT, (8)
Интегрирование функции (2) для интервалов времени от Т/4 до 3/4 и от 3/4 до 5/4 Т и аналогичные алгебраическое сложение их показывает, что
ΨIII+ΨIV = ωдрT, (10)
Таким образом, выражения (8) и (10) дают значение дрейфа, а (9) и (11) дают информацию о двух компонентах угловой скорости объекта, преобразовав которую, получаем:
Эти формулы и являются алгоритмом работы центрального процессора 22.
Для оценки результата повышения точности предлагаемого волоконнооптического ДУСа был проведен эксперимент на приборе 34-005, который закрепляется на кронштейне поворотного устройства МПУ-1, вращающаяся плоскость которого параллельна плоскости горизонта. Вращение ВОГа проводилось со скоростями 0,2; 6; 15 угл. град. в секунду. Анализ осциллограмм показал, что схема предложенного устройства позволяет определять две компоненты угловой скорости с повышением ее точности в 60 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2158903C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2014 |
|
RU2582230C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА НАЗЕМНОГО ТРАНСПОРТА | 2005 |
|
RU2296299C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
Датчик предназначен для использования в навигационных системах. На подвесе расположены источник лазерного излучения, модулятор, светоделитель и чувствительный элемент. Чувствительным элементом является многовитковая катушка из волоконного световода. Ось чувствительности катушки перпендикулярна оси подвеса. Фотоприемник оптически связан с источником через чувствительный элемент и светоделитель. Поляризатор размещен между источником и модулятором. Генератор опорного напряжения выполнен в виде датчика углового положения оси подвеса. Регистратор и датчик углового положения соединены со схемой интегрирования, определения фазового угла поворота подвеса и вычитания, что обеспечивает повышение точности определения двух компонент угловой скорости объекта. 1 з.п. ф-лы, 3 ил.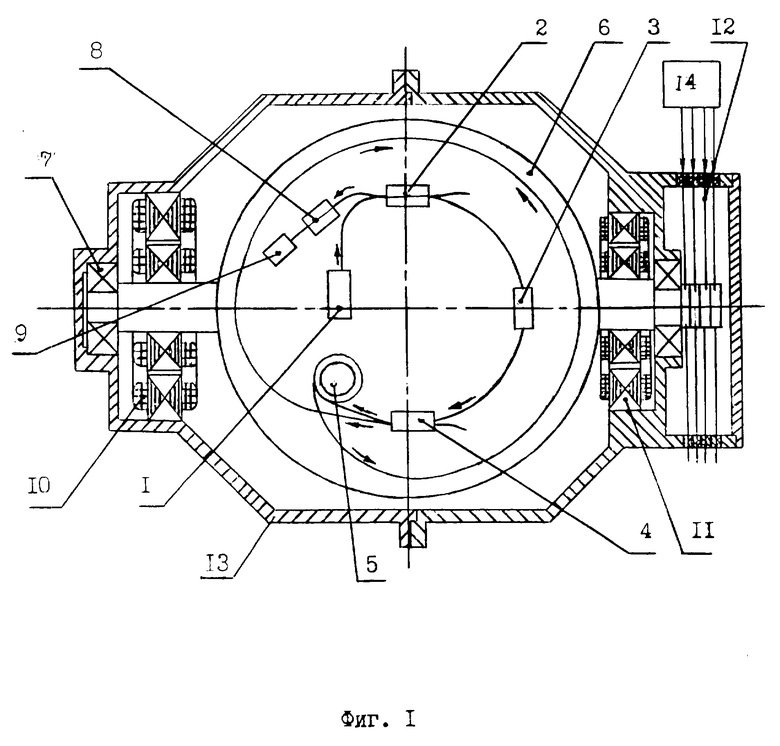
| Лазерный волоконный гироскоп | 1981 |
|
SU972923A1 |
| SU 1334888 А, 10.01.96 | |||
| Бычков С.И | |||
| и др | |||
| Лазерный гироскоп | |||
| - М.: Советское радио, 1975, с.336-390 | |||
| US 5184195 А, 02.02.93 | |||
| EP 0388499 А, 26.09.90 | |||
| RU 94028955 А, 20.06.96. | |||
