Фиг.1
Изобретение относится к области машиностроения и может быть использовано для определения координат в системах технического зрения промышленных роботов.
Известно устройство корреляционного зрения робота, содержащее телекамеру, оптический коррелятор с эталонной маской, логическую схему и преобразователь сигналов. Данное устройство {является простран- ственно-н«инвариантной оптической системой, что снижает его функциональные возможности.
Из известных технических решений наиболее близким по технической сущности является устройство корреляционного зрения робота, которое содержит телевизионную камеру, оптический коррелятор с эталонной маской, на которой выполнено п изображений детали, а корреляционная плоскость оптического коррелятора имеет п областей, в каждой из которых установлены фотодиоды, выходы которых электрически связаны с логической схемой.
Известное устройство основано на принципах геометрической оптики. Поэтому наличие характерных аберрационных искажений определяет возможность работы таких устройств с объектами, имеющими простые геометрические формы. Использование для считывания полезного сигнала фотоэлектрических преобразователей мгновенного действия в сочетании с устройством ввода, катодолюминофор которого имеет конечное время после свечения искажает результаты корреляционного анализа изображений, что снижает его функциональные возможности.
Целью настоящего изобретения является расширение функциональных возможностей за счет расширения класса распознаваемых объектов и увеличения точности определения их координат путем использования дифракционного коррелятора, ввод распознаваемых изображений в который осуществляется электронно-лучевой трубкой с катодолюминисцентным квазимонохроматическим экраном, а для считывания автокорреляционного сигнала используется фотоэлектрические преобразователи с полным накоплением заряда.
На фиг.1 приведена принципиальная схема устройства; на фиг. 2 блок-схема блока анализатора видеосигнала.
Предлагаемое устройство предназначено для управления роботом 1, который ра- ботае с объектами, расположенными в рабочей плоскости 2 (например, конвейер), оно содержит телекамеру 3, блок оконтури- вания изображения 4, оптический гологра- фический коррелятор, во входной плоскости
которого установлена электронно-лучевая трубка (ЭЛТ) с катодолюминисцечтным квазимонохроматическим экраном 5, в частной плоскости установлен с возможностью вращения вокруг оптической оси голографиче- ский пространственный фильтр б, кинематически связанный с устройством вращения 7 (например, шаговый двигатель). В выходной плоскости установлен видео0 датчик 8, фотомишень которого является многоэлементным фотоэлектрическим преобразователем с полным накоплением заряда (например, телекамера с видиконом или с ПЭС матрицей). Передняя фокальная пло5 скость первой Фурье-преобразующей линзы 9 голографического коррелятора совпадает с плоскостью экрана ЭЛТ 5, а в ее задней фокальной плоскости (частотной плоскости голографического коррелятора)
0 установлен голографический пространственный фильтр 6 (Фурье-голограмма распознаваемого изображения), передняя и задняя фокальные плоскости Фурье-преоб- разующей линзы 10 совпадают, соответст5 венно,сголографическим
пространственным фильтром б и видеодатчиком 8, осуществляющим преобразование пространственного распределения излучения на выходе голографического корреля0 тора в электрический сигнал. Выход вйдеодатчика 8 электрически связан со входом блока-анализатора видеосигнала 11, последний содержит двухпороговый компаратор 12, на вход которого подается ви5 деосигнал с видеодатчика 8, амплитудный селектор 13, на вход которого подается видеосигнал с видеодатчика 8, а выход электрически связан с блоком выделения задних фронтов строчных 14 и кадровых 15 синхро0 импульсов. Два двоичных счетчика 16 и 17. Вход счетчика 16 электрически связан с блоком выделения задних фронтов строчных синхроимпульсов 14 и выходом генератора тактовых сигналов 18, а входы счетчика 17
5 электрически связаны с выходом амплитудного селектора 13 и выходом блока выделения задних фронтов кадровых синхроимпульсов 15. Два буферных регистра 19 и 20. Цифровой вход буферного реги0 стра 19 электрически связан с цифровым выходом двоичного счетчика 16, а цифровой вход буферного регистра 20 - с цифровым выходом двоичного счетчика 17. стробируе- мые входы буферных регистров 19 и 20 элек5 трически связаны с выходом двухпорогового компаратора 12 и блоком сопряжения 21, на вход которого подаются электрические сигналы с выходов даухпо- рогового компаратора 12, блока выделения кадровых синхроимпульсов 15, и цифровые
сигналы с выходов буферных регистров 19 и 20. Выходы блока сопряжения 21 электрически связаны со входами буферных регистров 19 и 20, вычислительным блоком 22 (например, ЭВМ), блоком усилителей 23 и приводом вращения 7 голографического пространственного фильтра 6. Блок сопряжения 21 может быть выполнен в стандарте КАМАК, содержащем типовые блоки: цифро-аналоговый преобразователь (2ЦАП10), модуль управления шаговым двигателем (МУШД), модуль обмена данными (МОД-1), аналого-цифровой преобразователь (АЦП 13/20).
Устройство работает следующим образом. Чувствительным элементом является передающая трубка телевизионной камеры 3, установленная на расстоянии от рабочей плоскости 2, определяемым условием совпадения масштабов изображения рабочего объекта на экране ЭЛТ 5 и эталонного обь- екта, Фурье-голограмма которого записана на пространственном фильтре 6. В рабочем режиме оптический голографический коррелятор выполняет корреляционный анализ изображений объектов, попадающих в поле зрения телекамеры 3. Чувствительный элемент телекамеры 3 воспринимает множество объектов, находящихся в рабочей плоскости 2, и преобразует его в электрический сигнал, который затем поступает в блок 4, где происходит оконтуривание изображений. Преобразованный сигнал поступает в ЭЛТ 5, на экране которой воспроизводится контурное изображение объектов, находящихся в рабочей плоскости 2. Световой поток с экрана ЭЛТ 5 проходит через пространственный фильтр 6, и Фурье- преобразующие линзы 9, 10 в результате чего в корреляционной плоскости на фотомишени еидеодатчика 8 формируется световое поле, распределение интенсивности которого пропорционально функции взаимной корреляции эталонного изображения и той части оконтуренного изображения, которая оказывается светящейся на экране ЭЛТ 5 в текущий момент времени. Сигнал, полученный в результате полного накопления элементами фотоэлектрического преобразователя светового потока за время кадровой развертки ЭЛТ 5, пропорционален функции взаимной корреляции эталонного изображения и всего изображения на экране ЭЛТ 5.
Показатели наличия распознаваемого объекта в рабочей плоскости является появление в выходной плоскости голографическогокорреляторачеткогоавтокорреляционного сигнала, представляющего собой пространственно-локализованный максимум интенсивности излучения на фоне общего распределения интенсивности со значительно меньшей амплитудой, соответствующего функциям взаимной корреляции. Нижний порог двухпорогового компаратора 12 выбирается таким образом, чтобы электрический сигнал, соответствующий максимуму автокорреляции превышал указанный порог на 10-20% (для исключе0 ния влияния шумов устройства), но был выше уровня сигналов, соответствующих функциям взаимной корреляции. Верхний порог двухпорогового компаратора 12 выбирается из условия исключения влияния на
5 работу компаратора синхроимпульсов, содержащихся в видеосигнале (ниже их уровня). Корреляционный метод распознавания изображений по амплитудному признаку основан на известной теореме Коши-Швар0 ца, согласно которой сигнал автокорреляции всегда превышает сигнал взаимной корреляции (корреляционный функционал достигает своего максимума на данном классе функций только в случае автокорре5 ляции). В том случае, если напряжение на выходе видеодатчика 8, соответствующее степени интенсивности светового распределения в корреляционной плоскости не превышает нижнюю пороговую величину,
0 установленную в двухпороговом компараторе 12, на выходе компаратора 12 устанавливается сигнал низкого уровня, соответствующий либо отсутствию искомого объекта в рабочей плоскости, либо несов5 падению ориентации искомого и эталонного изображений объекта. По этому сигналу, который через блок сопряжения 21 поступает в вычислительный блок 22, где программным путем вырабатывается ко0 манда на дискретное вращение пространственного фильтра 6. В результате устройство вращения 7 приводит во вращение пространственный фильтр 6 с угловой дискретностью, определяемой выбранной угловой
5 точностью устройства. Вращение пространственного фильтра 6 осуществляется до тех пор, пока уровень напряжения, соответствующий корреляционному максимуму в световом распределении выходной плоскости
0 коррелятора не превысит заданного порогового напряжения компаратора 12, что является показателем наличия искомого объекта в рабочей плоскости и совпадение ориентации изображений этого объекта на экране
5 ЭЛТ 5 и эталонного изображения фильтра 6. В этом случае на выходе компаратора 12 формируется строб-сигнал, поступающий через устройство сопряжения 21 в вычислительный блок, где программным путем формируется команда на останов вращения
пространственного фильтра 6. Программным же путем на основе данных о первоначальной ориентации пространственного голографического фильтра 6 и числа дискретных угловых вращений, выполненных ус- тройством вращения 7 до его останова, вычисляется угловая ориентация распознаваемого изображения во входной плоскости голографического фильтра 6 (и соответственно ориентация детали в рабочей пло- скости 2 ). Определение пространственных координат X и У объекта в рабочей плоскости 2 осуществляется следующим образом. Двухпороговый компаратор 12 при наличии на его входе видеосигнала, уровень напря- жения которого превышает или соответствует пороговому напряжению компаратора 12, вырабатывает строб-сигнал высокого уровня: при этом амплитудный селектор 13 постоянно выделяет из видеосигнала строч- ные и кадровые синхроимпульсы, поступающие затем на входы блоков выделения задних фронтов строчных 14 и кадровых t5 синхроимпульсов. На вход двоичного счетчика 17 поступают синхроимпульсы, выде- ляемые амплитудным селектором 13, а его цифровой выход электрически связан с входом буферного регистра 20, данные в который записываются по строб-сигналу компаратора 12, что позволяет зарегистри- ровать номер той строки, на которую пришел корреляционный пик, и, соответственно, определить одну из пространственных координат объекта в предметной плоскости. С начала нового кадра счетчик 17 обнуляется стробом блока 15. формируемого по заднему фронту кадрового синхроимпульса. Счетчик 16 обнуляется задним фронтом каждого строчного синхроимпульса, после чего счетчик 16 отсчитыва- ет импульсы генератора 18 прямоугольных импульсов, частота которого выбрана из условия соответствия верхней границе частот- ного спектра видеосигнала, что дает точность определения другой пространет- венной координаты до одного элемента разрешения телевизионного изображения используемого телевизионного стандарта. Цифровой выход счетчика 16 электрически связан с входом буферного регистра 19, за- пись двоичного представления числа прямоугольных импульсов в буферный регистр 19, вырабатываемых тактовым генератором 18 с момента сброса счетчика 16 задним фронтом очередного строчного синхроим- пульса, происходит только при наличии сигнала высокого уровня (строб-сигнала) на выходе компаратора 12, Считывание двоичного представления пространственных координат объекта с буферных регистров 19 и
20 в вычислительный блок 22 осуществляется по команде, вырабатываемой соответственно вычислительным блоком 22 и передаваемой через блок сопряжения 21 на буферные регистры 19 и 20. Таким образом, при наличии автокорреляционного пика в выходной плоскости голографического коррелятора в оперативную память загружается двоичное представление координат, характеризующих пространственное положение объекта в рабочей плоскости и его угловая координата.
Для однозначного определения координаты входного изображения на экране ЭЛТ 5 с предельно возможной точностью необходимо, чтобы временная когерентность излучения катодолюминофора ЭЛТ 5 отвечала соотношению
.
где А - средняя длина волны;
ДА - эффективная ширина спектра;
N - число элементов разрешения телевизионного растра на экране ЭЛТ 5.
Формула изобретения
1. Устройство корреляционного зрения робота, содержащее телекамеру, блок окон- туривания изображений, оптический коррелятор, логическую схему, преобразователь сигналов и робот с силовыми приводами, причем оптический коррелятор состоит из установленных последовательно электронно-лучевой трубки, эталонной маски линзы и фотодиодов, отличающееся тем, что, с целью расширения функциональных возможностей, коррелятор выполнен гологра- фическим и состоит из установленных последовательно электронно-лучевой трубки с катодо-люминисцентным квазимонохроматическим экраном, первой Фурье преобразующей линзы, голографического пространственного фильтра, второй Фурье преобразующей линзы и видеодатчика, фотомишень которого является многоэлементным фотоэлектрическим преобразователем с полным накоплением заряда, причем голо- графический пространственный фильтр установлен с возможностью вращения вокруг оптической оси и кинематически связанный с устройством вращения, а передняя фокальная плоскость первой Фурье преобразующей линзы совпадает с плоскостью экрана электронно-лучевой трубки, ее задняя фокальная плоскость совпадает с плоскостью голографического пространственного фильтра, передняя фокальная плоскость второй Фурье преобразующей линзы совпадает с плоскостью голографического пространственного фильтра, а ее задняя фокальная плоскость совпадает с плоскостью фотомишени видеодатчика, вход коррелятора соединен с выходом блоком оконтурива- ния изображений, вход которого соединен с выходом телекамеры, а выход коррелятора соединен с входом блока-анализатора видеосигнала, который связан с входом блока сопряжения, а выходы соединены с входами вычислительного блока, с входом привода вращения голографического пространственного фильтра и входами блока усилителей, соединенного с роботом,
2.Устройство по п,1, отличающее- с я тем, что временная когерентность излучения кэтодо-люминофора электронно-лучевой трубки выбрана из соотношения
Я - средняя длина волны;
ДА - эффективная ширина спектра;
N - число элементов разрешения телевизионного растра на экране электроннолучевой трубки,
а телекамера, используемая для формирования изображений, синхронизирована с видеодатчиком на выходе голографического коррелятора.
3.Устройство поп,1,отдичэк щее- с я тем, что блок-анализатор видеосигнала содержит двухпороговый компаратор, амплитудный селектор, блок выделения задних
фронтов строчных синхроимпульсов и блок выделения задних фронтов кадровых синхроимпульсов, два двоичных счетчика, генератор тактовых импульсов и два буферных
регистра, входдвухпорогового компараторд электрически связан с выходом видеодэтчи- ка, а выход - с блоком сопряжения, вход амплитудного селектора электрически связан с выходом видеодатчика, а выход - с
блоками выделения задних фронтов строчных и кадровых синхроимпульсов, входы первого двоичного счетчика электрически связаны с выходами блока выделения задних фронтов строчных синхроимпульсов и
генератора тактовых импульсов, а входы второго двоичного счетчика электрически связаны с выходом амплитудного селектора и выходом блока выделения задних фронтов кадровых синхроимпульсов, выход последнего электрически связан с блоком сопряжения, цифровой вход первого буферного регистра электрически связан с цифровым выходом первого двоичного счетчика, а цифровой вход второго буферного регистра - с цифровым выходом второго двоичного счетчика, стробируемые входы записи обоих буферных регистров электрически связаны с выходом двухпорогового компаратора и выходом блока сопряжения, а цифровые
выходы буферных регистров электрически связаны с цифровым входом блока сопряжения.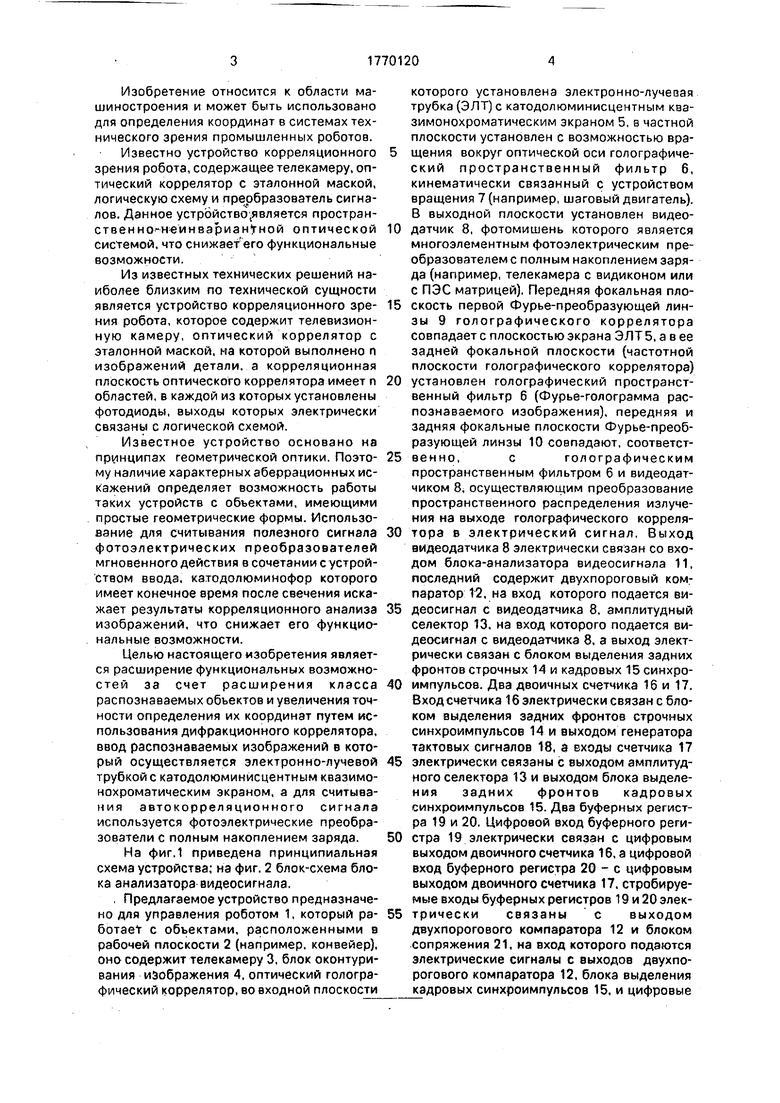
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения дальности по параллактическому углу | 1988 |
|
SU1696863A1 |
| РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 2004 |
|
RU2266565C1 |
| СТЕРЕОМОНИТОР | 2005 |
|
RU2279190C1 |
| ЦИФРОВОЙ МОНИТОР | 2004 |
|
RU2265286C1 |
| ТЕЛЕВИЗИОННО-КОРРЕЛЯЦИОННЫЙ ДАЛЬНОМЕР | 1994 |
|
RU2086918C1 |
| ДИНАМИЧЕСКИЙ ОПТИЧЕСКИЙ КОРРЕЛЯТОР | 1991 |
|
RU2022326C1 |
| ПЕРСОНАЛЬНЫЙ КОМПЬЮТЕР | 2004 |
|
RU2279708C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ЦВЕТА ОБЪЕКТА | 1998 |
|
RU2142144C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| ЦИФРОВАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ ВЫСОКОЙ ЧЕТКОСТИ | 2000 |
|
RU2194370C2 |

Использование: для определения координат в системах технического зрения промышленных роботов. Сущность изобретения: устройство содержит робот 1. рабочую плоскость 2. телекамеру 3, блок 4 оконтурированмя изображений, электроннолучевую трубку 5. топографический пространственный фильтр 6, устройство вращения 7, видеодатчик 8, две Фурье-пре- образующие линзы 9, 10. блок-анализатор видеосигнала 11, блок сопряжения 21. вычислительный блок 22, блок усилителей 23. 2 з.п. ф-лы, 2 ил.
| Устройство корреляционного зренияРОбОТА | 1979 |
|
SU837854A1 |
