(54) УСТРОЙСТВО КОРРЕЛЯЦИОННОГО ЗРЕНИЯ РОБОТА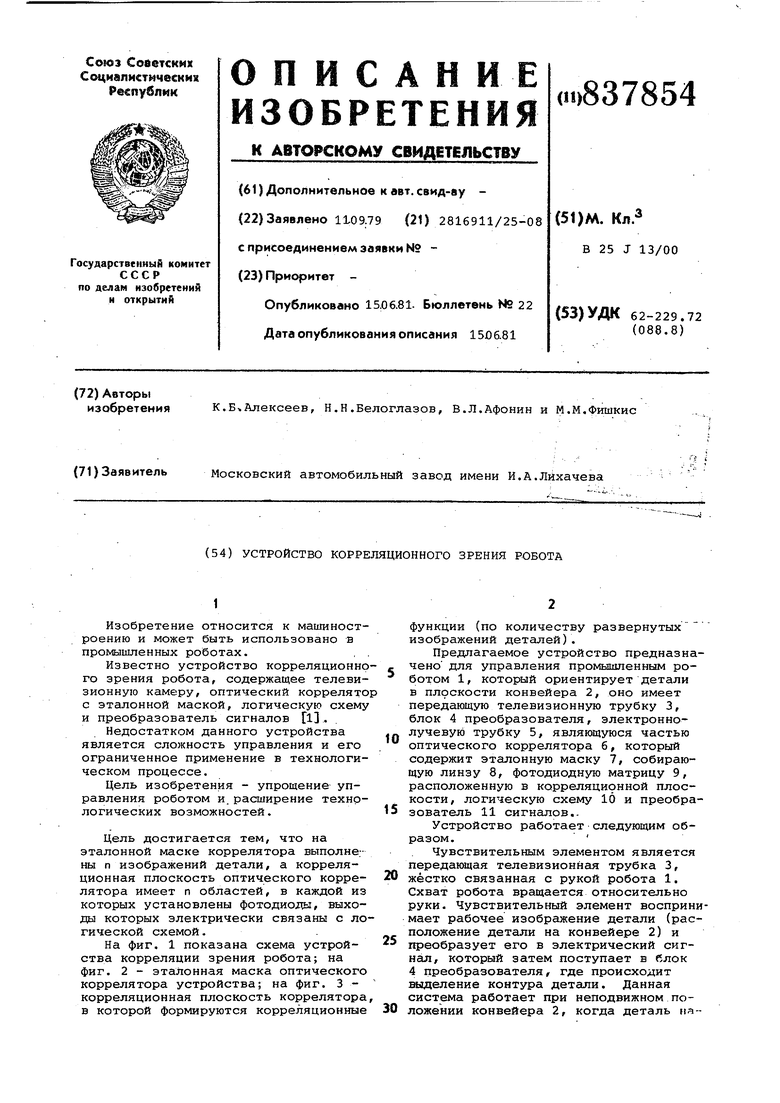
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство корреляционного зрения робота | 1990 |
|
SU1770120A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ЦВЕТА ОБЪЕКТА | 1998 |
|
RU2142144C1 |
| Устройство для ориентации плоских деталей с прямолинейными сторонами | 1983 |
|
SU1085753A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| Устройство для контроля отклонения геометрических параметров деталей | 1983 |
|
SU1138645A1 |
| Устройство для распознавания и определения координат объекта манипулирования в рабочей зоне робота | 1985 |
|
SU1370639A1 |
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР | 2002 |
|
RU2212054C1 |
| СПОСОБ ВИДЕОСОПРОВОЖДЕНИЯ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2716005C2 |
| СИСТЕМА ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2012 |
|
RU2538336C2 |
| КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНЫЙ КООРДИНАТОР ЦЕЛИ | 1989 |
|
RU2103707C1 |
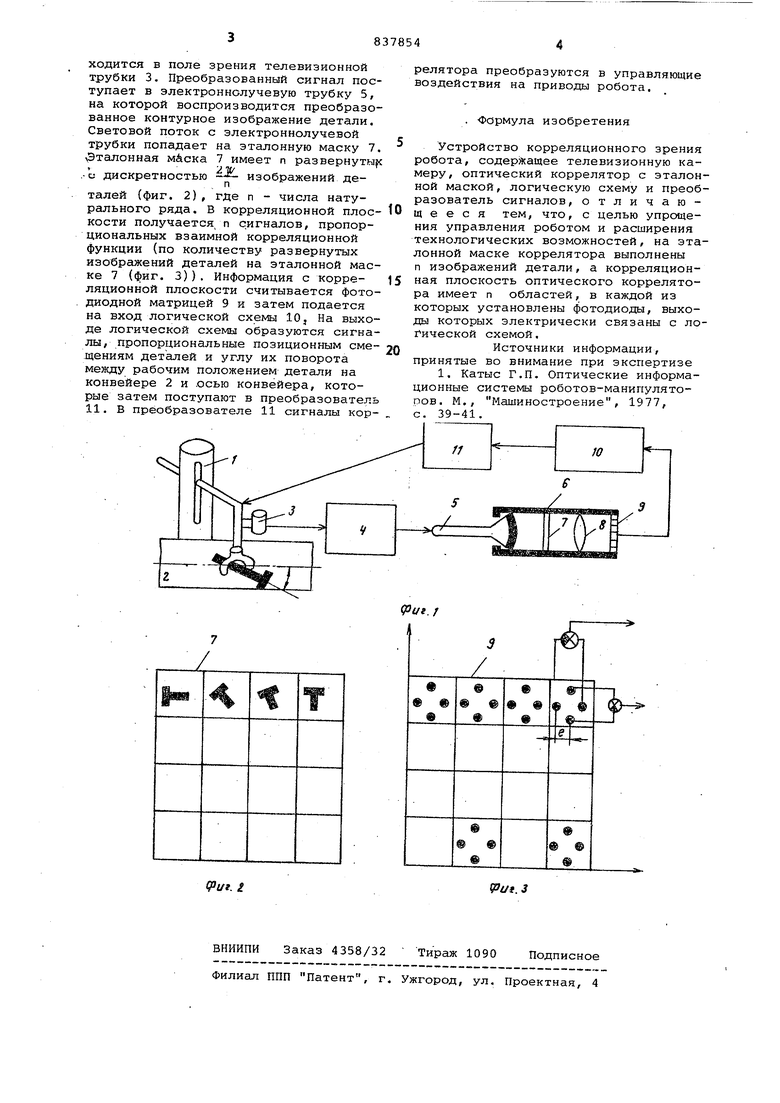
Изобретение относится к машиностроению и может быть использовано в промышленных роботах., Известно устройство корреляционно го зрения робота, содержащее телевизионную камеру, оптический коррелято с эталонной маской, логическую схему и преобразователь сигналов 1. Недостатком данного устройства является сложность управления и его ограниченное применение в технологическом процессе. Цель изобретения - упрощение управления роботом и.расширение технологических возможностей. Цель достигается тем, что на эталонной маске коррелятора выполнены п изображений детали, а корреляционная плоскость оптического коррелятора имеет п областей, в каждой из которых установлены фотодиоды, выходы которых электрически связаны с ло гической схемой. На фиг. 1 показана схема устройства корреляции зрения робота; на фиг. 2 - эталонная маска оптического коррелятора устройства; на фиг. 3 корреляционная плоскость коррелятора в которой формируются корреляционные функции (по количеству развернутых изображений деталей). Предлагаемое устройство предназначено для управления промышленным роботом 1, который ориентирует детали в плоскости конвейера 2, оно имеет передающую телевизионную трубку 3, блок 4 преобразователя, электроннолучевую трубку 5, являющуюся частью оптического коррелятора б, который содержит эталонную маску 7, собирающую линзу 8, фотодиодную матрицу 9, расположенную в корреляционной плоскости, логическую схему 10 и преобразователь 11 сигналов.. Устройство работает следующим образом. Чувствительным элементом является передающая телевизионная трубка 3, жёстко связанная с рукой робота 1. Охват робота вращается относительно руки. Чувствительный элемент воспринимает рабочее изображение детали (расположение детали на конвейере 2) и преобразует его в электрический сигнал, который затем поступает в блок 4 преобразователя, где происходит иеделение контура детали. Данная система работает при неподвижном положении конвейера 2, когда деталь ня
