(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения емкости или индуктивности | 1980 |
|
SU883796A1 |
| Устройство для измерения приращений емкости или индуктивности | 1980 |
|
SU954896A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ | 1998 |
|
RU2138828C1 |
| Цифровой измеритель сопротивления,емкости и индуктивности | 1972 |
|
SU467302A1 |
| Устройство для измерения приращений емкости или индуктивности | 1980 |
|
SU883795A1 |
| ЦИФРОВОЙ ПОТОЧНЫЙ ИЗМЕРИТЕЛЬ ВЛАЖНОСТИ | 2009 |
|
RU2397483C1 |
| Цифровой датчик линейных перемещений | 1990 |
|
SU1739185A1 |
| Цифровой синтезатор частоты с частотной модуляцией | 1987 |
|
SU1543544A1 |
| Устройство для измерения емкости диэлектриков | 1980 |
|
SU938202A1 |
| Измеритель параметров диэлектрических сред и материалов | 1986 |
|
SU1383226A1 |
Изобретение относится к измерительной технике и позволяет повысить точность измерения перемещений, зазоров и т.п. Преобразователь содержит емкостной датчик, коммутатор, измерительный автогенератор, преобразователь частоты, стабилизированный автогенератор, частотомер, блок автоподстройки частоты, два ключа, запоминающий элемент, образцовый элемент, цифровой измеритель отношения частот, опорный регистр, цифровой коммутатор, регистр памяти, цифроаналого- вый преобразователь, перестраиваемый генератор и блок управления. 1 ил.
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений, зазоров и т.п.
Известны преобразователи перемещений емкостного типа. Одним из них является преобразователь малых приращений емкости или индуктивности, содержащий образцовый и контролируемый элементы, подключенные через ключ к измерительному генератору, смеситель, гетеродин, усилитель низкой частоты, цепь автоподстройки частоты (АПЧ). Недостатком известного преобразователя является невысокая точность преобразования, обусловленная тем, что не все элементы схемы охвачены цепью П АПЧ и их влияние не учитывается.
Известны емкостные преобразователи перемещения, в которых реализован тестовый метод повышения точности. Недостатком преобразователей перемещений, в которых реализован тестовый метод, является большая сложность, обусловленная необходимостью выполнения специального тестового перемещения. Исключение мультипликативной составляющей погрешности осуществляется с помощью системы рычагов. Кроме сложности, система рычагов вносит дополнительную погрешность из-за люфтов в соединениях, что может свести на нет выигрыш в точности при применении тестового метода.
За прототип выбрано устройство для измерения перемещений, содержащее последовательно соединенные емкостной датчик, первый ключ, измерительный автогенератор, преобразователь частоты, частотомер, блок автоподстройки частоты, второй ключ, запоминающий элемент, опорный генератор и генератор коммутационного напряжения.
Недостатком известного устройства является недостаточно высокая точность.
V4
ч
О СО N3
обусловленная тем, что из результата измерения не исключена мультипликативная составляющая систематической погрешности.
Целью настоящего предполагаемого изобретения является повышение точности преобразователя.
Поставленная цель достигается тем, что преобразователь перемещения в код, содержащий емкостной датчик, подключенный к первому входу коммутатора, выход которого включен в часрготозависимую цепь измерительного автогенератора, подключенного своим выходом к входу преобразователя частоты, к другому входу которого подсоединен стабилизированный автогенератор, выход преобразователя частоты соединен со входом частотомера, выходы измерительного и стабилизированного автогенераторов соединены также с соответствующими входами блока автоподстройки частоты, выход которого через последовательно соединенные первый ключ и запоми- нающий элемент включен в цепь подстройки частоты измерительного автогенератора, управляющие входы коммутатора первого ключа и частотомера соединены с соответствующими выходами блока управления, введены образцовый элемент, подключенный к второму входу коммутатора, перестраиваемый генератор, цифровой измеритель отношения частот, опорный регистр, цифровой компаратор, регистр памяти, второй ключ и цифроанало- говый преобразователь, причем, выходы преобразователя частоты и перестраиваемого генератора подключены к входам цифрового измерителя отношения частот, выход которого соединен с первым входом цифрового компаратора, соединенного вторым входом с опорным регистром, выход цифрового компаратора через последовательно соединенные второй ключ, регистр памяти и цифроаналоговый преобразователь включен в цепь подстройки частоты перестраиваемого генератора, выход которого соединен также с соответствующим входом частотомера, а управляющий вход второго ключа подключен к блоку управления.
Повышение точности достигается за счет исключения мультипликативной составляющей систематической погрешности (погрешности чувствительности), а исключение погрешности чувствительности за счет введения новых элементов: образцового элемента, перестраиваемого по частоте генератора, цифрового измерителя отношения частот, опорного регистра, цифрового компаратора, регистра памяти, ЦАП и соответствующих связей.
Введение образцового элемента перемещения и вышеперечисленных новых элементов и связей позволяет сформировать высокочастотный сигнал, частота которого
пропорциональна известному образцовому перемещению, затем сформировать сигнал, пропорциональный неизвестному перемещению, и далее сформировать код отношения этих частот, из которого легко
нах одится значение неизвестного перемещения, т.к. значение образцового перемещения известно, причем полученное значение кода свободно от мультипликативной составляющей систематической погрешности.
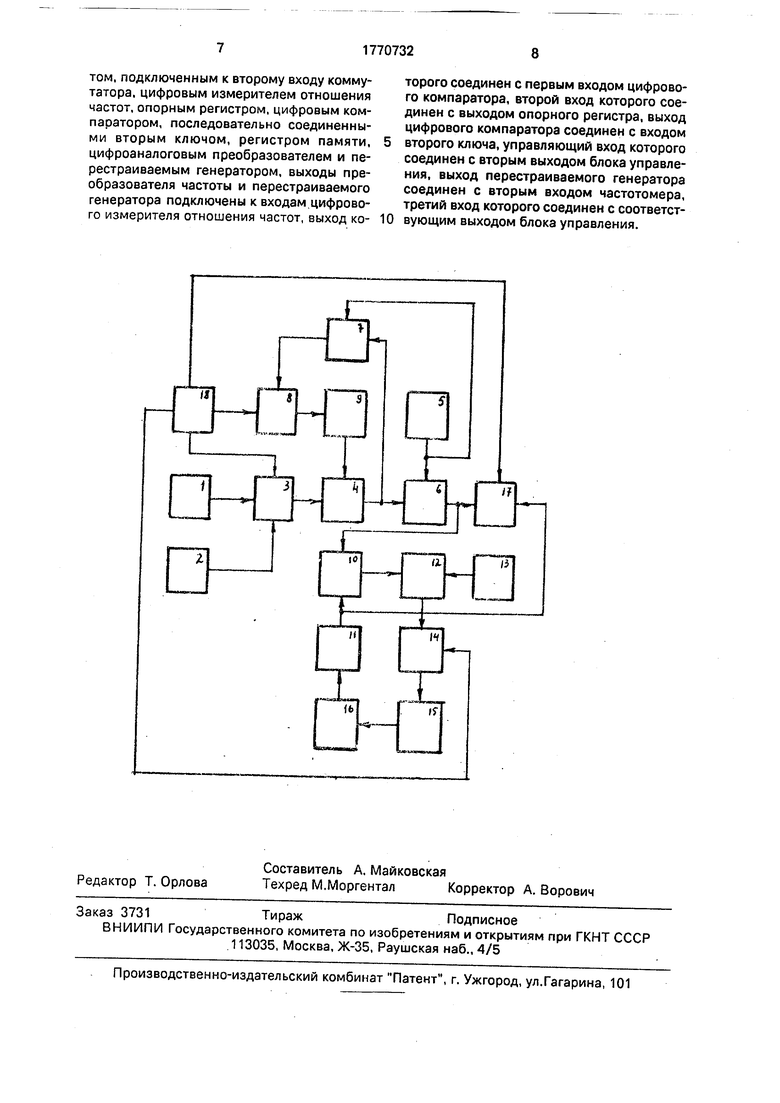
На чертеже представлена структурная
схема преобразователя перемещения в код.
Преобразователь содержит емкостной
датчик 1 и образцовый элемент 2, подключенные через коммутатор 3 к частотозависи- мой цепи измерительного автогенератора 4, выход которого, а также выход стабилизированного ,-енератора 5 соединены с соответствующими входами преобразователя
частоты 6 и блока аетоподстройки частоты 7, соединенного своим выходом через последовательно соединенные управляемый ключ 8 и запоминающий элемент 9 с входом подстройки частоты измерительного автогенератора 4, выход преобразователя частоты 6 соединен со входом цифрового измерителя 10 отношения частот, к другому входу которого подсоединен выход перестраиваемого генератора 11, выход цифрового измерителя отношения частот 10 соединен со входом цифрового компаратора 12, другой вход которого соединен с опорным регистром 13, а выход цифрового компаратора 12 через последовательно соединенные второй ключ 14, регистр памяти 15 и цифроаналоговый преобразователь 16 соединен с входом подстройки частоты перестраиваемого генератора 11, выходы преобразователя частоты 6 и перестраиваемого
генератора 11 соединены с соответствующими входами частотомера 17, управляющий вход которого, 8 также управляющие входы компаратора 3 и управляемых ключей 8 и 14 соединены с соответствующими выходами блока управления 18, функции которого может выполнять стандартный программатор или контроллер, например, К1-20.
Устройство работает следующим образом.
Для исключения аддитивной и мультипликативной составляющих погрешности организован 3-х кратный режим работы. В первом такте емкостной датчик 1 и
образцовый элемент 2 коммутатором 3, управляемым блоком 18, отключены от измерительного автогенератора 4, но замкнут первый ключ 6. При этом управляющее напряжение, выработанное в блоке автоподстройки частоты 7, через замкнутый ключ 8 поступает на запоминающий элемент 9, где запоминается и воздействует на реактивный элемент измерительного автогенарато- ра 4, устанавливая его частоту равной частоте стабилизированного генератора 6, частота которого выбрана равной частоте измерительного автогенератора 4 при отключенном датчике, обеспечивая тем самым линейность преобразования.
Во втором такте образцовый элемент 2 коммутатором 3 подключается к измерительному автогенератору 4 и замыкается второй ключ 14. В этом такте частота перестраиваемого генератора 11 подстраивается разной разностной частоте, получаемой в преобразователе 6 и умноженной на некоторый постоянный коэффициент Р, например, равный 100. Это умножение осуществляется с помощью цифрового компаратора 12, опорного регистра 13, регист- ра памяти 15, второго ключа 14 и цифроаналогового преобразователя 16. Подстройка осуществляется таким образом. В опорном регистре хранится коэффициент умножения Р, какужеупоминалось, равный, например 100. Если число, полученное в измерителе отношения частот, не равно Р, то цифровой компаратор 12 вырабатывает цифровой код ошибки, который через ключ 14 подается в регистр памяти 15 и здесь запоминается. Этот код преобразуется в ЦАП 15 в управляющее напряжение, которое подается в цепь подстройки частоты генаратора 11, подстраивая его частоту равной разностной частоте, умноженной на по- стоянный коэффициент. В момент равенства частот ключ 14 размыкается, а управляющее воздействие запоминается в регистре памяти 15.
В третьем такте образцовый элемент 2 отключается: а емкостной датчик 1 подключается коммутатором 3 к автогенератору 4, частота которого вместе с частотой генератора 5 поступает в преобразователь частоты 6, где с помощью смесителя и фильтра ниж- них частот формируется разностная частота, период которой прямопропорционален измеряемому перемещению. Разностная частота из преобразователя 6 поступает в частотомер 17, в который поступает также частота генератора 11, и который работает в режиме измерения отношения частоты генератора 11 к разностной частоте преобразователя 6.
Как было сказано выше, период резонансной частоты пропорционален перемещению
Тр - К -X,(1)
где К - коэффициент пропорциональности, определяющий чувствительность преобразователя;
X - перемещение.
В то же время при подключенном образцовом элементе
1
Тр.обр. К-Хобр. -р ,(2)
где Р - коэффициент умножения частоты; Х0бр. - образцовое перемещение. Отношение частот равно
п - F°6p Тг, Р X,„,.
Q - . -я(3)
о р.обр лобр
Как видно из (3), результат независим от коэффициента К, определяющего чувствительность, т.е. из систематической погрешности исключена мультипликативная составляющая погрешности.
Из (3) следует
Y Q Y
ЛR- Лобр
где Q - показание частотомера;
Р - коэффициент умножения известен;
Хобр. - значение образцового перемещения,
Использование заявляемого технического решения позволяет исключить влияние на результаты измерения мультипликативной составляющей систематической погрешности (погрешности чувствительности) и тем самым повысить точность измерения перемещений.
Формула изобретения
Преобразователь перемещения в код, содержащий емкостный датчик, подключенный к первому входу коммутатора, выход которого включен в частотозависимую цепь измерительного автогенератора, соединенного своим выходом с входом преобразователя частоты, к другому входу которого подсоединен стабилизированный автогенератор, выход преобразователя частоты соединен с входом частотомера, выходы измерительного и стабилизированного автогенераторов соединены также с соответствующими входами блока автоподстройки частоты, выход которого через последовательно соединенные первый ключ и запоми- нающий элемент включен в цепь подстройки частоты измерительного автогенератора, управляющие входы коммутатора и первого ключа соединены с соответствующими выходами блока: управления, отличающийся тем, что, с целью повышения точности, он снабжен образцовым элементом, подключенным к второму входу коммутатора, цифровым измерителем отношения частот, опорным регистром, цифровым компаратором, последовательно соединенными вторым ключом, регистром памяти, цифроаналоговым преобразователем и перестраиваемым генератором, выходы преобразователя частоты и перестраиваемого генератора подключены к входам цифрового измерителя отношения частот, выход ко0
торого соединен с первым входом цифрового компаратора, второй вход которого соединен с выходом опорного регистра, выход цифрового компаратора соединен с входом второго ключа, управляющий вход которого соединен с вторым выходом блока управления, выход перестраиваемого генератора соединен с вторым входом частотомера, третий вход которого соединен с соответствующим выходом блока управления.
| Преобразователь малых приращений емкости или индуктивности в напряжении | 1976 |
|
SU579589A1 |
| Приборы и системы управления | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Способ измерения перемещений | 1979 |
|
SU953441A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
