Изобретение относится к измерительной технике, а более конкретно к технике измерения деформаций в строительных конструкциях при воздействии кратковременных динамических нагрузок
Известно устройство, представляющее собой два рычага, шарнирно связанных между собой. Свободные концы рычагов связаны с испытуемой оболочкой сооружения, а измерительный элемент расположен на одном из рычагов 1.
Недостатками этого устройства являются: влияние поперечных деформаций на участке между опорами, недостаточная податливость системы (при высокоскоростных деформациях система не успевает перестраиваться для передачи возмущений по всей кинематической цепи), уменьшение
точности вследствие деформации рьшагоа, возможность потери прочности элементов устройства.
Наиболее близким к предложенному техническому решению является устройство для измерения деформаций стенок объекта, содержащее трехзвенную систему взаимосвязанных рычагов, предназначенных для восприятия деформаций стенок объекта, два амортизатора, каждый из которых связан с соответствующим узлом соединения рычагов и предназначен для крепления к недеформируемум стенкам объекта, и два измерителя углового положения рычагов, размещенные в узлах их соединения 2.
В большинстве случае в реальных условиях имеет место неосесимметричное возVJ XI
Ю
СЛ
(О
VI
действие динамической нагрузки на объект, В стенках объекта возникают нестационарные колебания. Смещающие силы вызывают при этом вращательное движение, горизонтальные и вертикальные смещения. Сложный характер реакций стенок объекта требует измерения этих составляющих.
Принятое в качестве прототипа устройство не обеспечивает этих измерений.
Целью изобретения является повышение точности измерения за счет увеличений числа степеней свободы и количества измерителей углового положения рычагов,
Указанная цель достигается тем, что устройство для измерения деформаций стенок объекта, ограничивающих замкнутый объем,содержащее трехзвенную систему взаимосвязанных рычагов, предназначенных для восприятия деформаций стенок объекта, два амортизатора, каждый из которых связан с соответствующим узлом соеди- нения рычагов и предназначен для крепления к недеформируемым стенкам объекта, и два измерителя углового, положения рычагов, размещенные в узлах их соединения, снабжено первой телескопической штангой, один конец которой соединен с одним из крайних рычагов, а второй конец предназначен для жесткого соединения со стенкой объекта, второй телескопической штангой, один конец которой соединен со вторым крайним рычагом, а второй конец предназначен для соединения со стенкой объекта посредством подшипника, установленными в узлах соединения рычагов и узлах соединения штанг с рычагами соединительными элементами коробчатой формы, двумя дополнительными амортизаторами, каждый из которых связан с соответствующим узлом соединения штанг с рычагом и предназначен для крепления к недеформируемым стенкам объекта, третьим измерителем углового положения рычагов, установленным на втором конце второй телескопической штанги, четвертым и пятым измерителями углового положения рычагов, каждый из которых размещен в соответствующем узле соединения рычагов и установлен на элементе коробчатой формы, четырьмя дополнительными измерителями углового положения рычагов, размещенными по два на каждом элементе коробчатой формы в узлах соединения штанг с рычагами во взаимно перпендикулярных плоскостях, каждый из двух измерителей углового положения рычагов, размещенных в узлах их соединения, установлен на элементе коробчатой формы в плоскости соответствующего четвертого или пятого измерителя углового положения
рычагов, а все амортизаторы выполнены резиновыми.
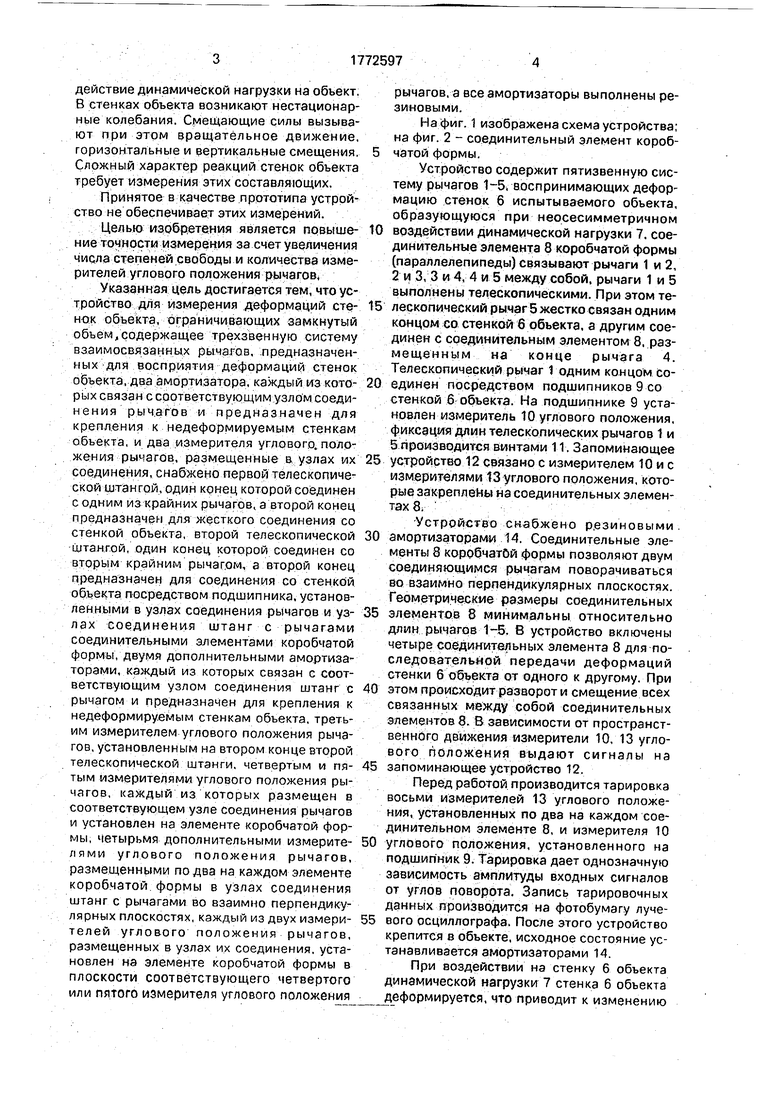
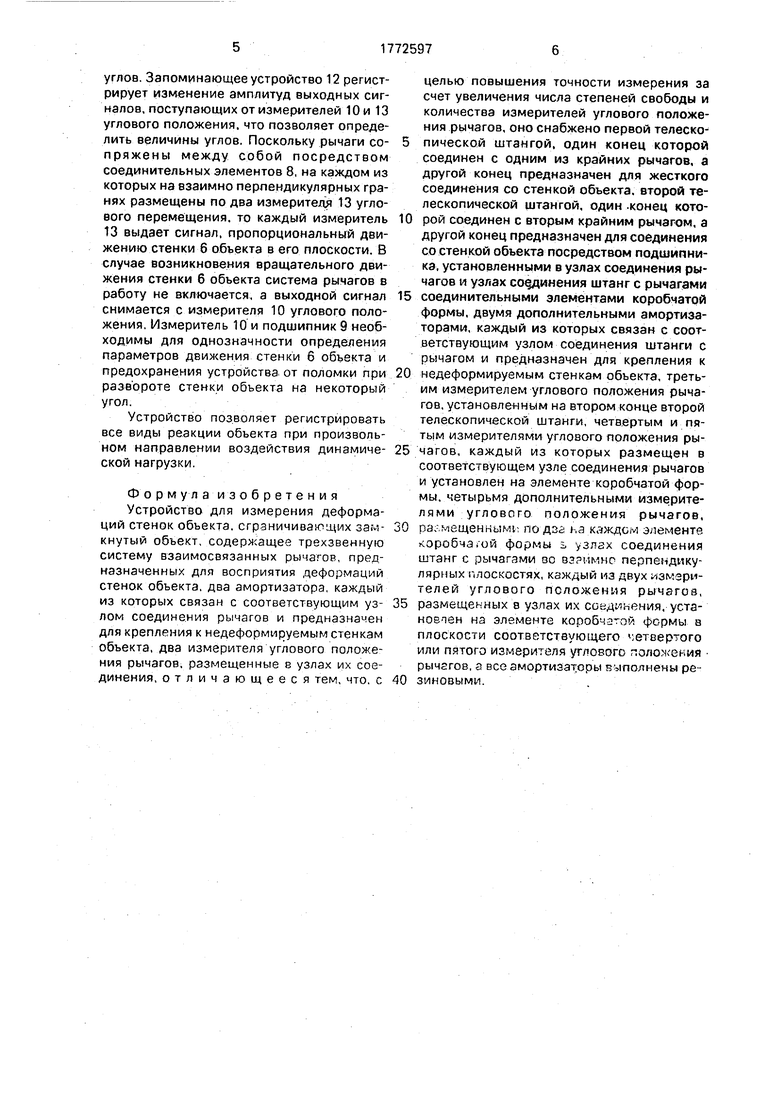
На фиг. 1 изображена схема устройства; на фиг. 2 - соединительный элемент коробчатой формы.
Устройство содержит пятизвенную систему рычагов 1-5, воспринимающих деформацию стенок 6 испытываемого объекта, образующуюся при неосесимметричном
0 воздействии динамической нагрузки 7. соединительные элемента 8 коробчатой формы (параллелепипеды) связывают рычаги 1 и 2, 2 и 3, 3 и 4, 4и5 между собой, рычаги 1 и 5 выполнены телескопическими. При этом те5 лескопический рычаг 5 жестко связан одним концом со стенкой 6 объекта, а другим соединен с соединительным элементом 8. размещенным на конце рычага 4. Телескопический рычаг 1 одним концом со0 единен посредством подшипников 9 со стенкой 6 объекта. На подшипнике 9 установлен измеритель 10 углового положения, фиксация длин телескопических рычагов 1 и 5 производится винтами 11. Запоминающее
5 устройство 12 связано с измерителем 10 и с измерителями 13 углового положения, которые закреплены на соединительных элементах 8.
Устройство снабжено резиновыми
0 амортизаторами 14. Соединительные элементы 8 коробчатой формы позволяют двум соединяющимся рычагам поворачиваться во взаимно перпендикулярных плоскостях. Геометрические размеры соединительных
5 элементов 8 минимальны относительно длин рычагов 1-5. В устройство включены четыре соединительных элемента 8 для последовательной передачи деформаций стенки 6 объекта от одного к другому. При
0 этом происходит разворот и смещение всех связанных между собой соединительных элементов 8. В зависимости от пространственного движения измерители 10, 13 углового положения выдают сигналы на
5 запоминающее устройство 12.
Перед работой производится тарировка восьми измерителей 13 углового положения, установленных по два на каждом соединительном элементе 8, и измерителя 10
0 углового положения, установленного на подшипник 9. Тарировка дает однозначную зависимость амплитуды входных сигналов от углов поворота. Запись тарировочных данных производится на фотобумагу луче5 вого осциллографа. После этого устройство крепится в объекте, исходное состояние устанавливается амортизаторами 14.
При воздействии на стенку 6 объекта динамической нагрузки 7 стенка 6 объекта деформируется, что приводит к изменению
углов. Запоминающее устройство 12 регистрирует изменение амплитуд выходных сигналов, поступающих от измерителей 10 и 13 углового положения, что позволяет определить величины углов. Поскольку рычаги сопряжены между собой посредством соединительных элементов 8, на каждом из которых на взаимно перпендикулярных гранях размещены по два измерителя 13 углового перемещения, то каждый измеритель 13 выдает сигнал, пропорциональный движению стенки б объекта в его плоскости. В случае возникновения вращательного движения стенки б объекта система рычагов в работу не включается, а выходной сигнал снимается с измерителя 10 углового положения. Измеритель 10 и подшипник 9 необходимы для однозначности определения параметров движения стенки б объекта и предохранения устройства от поломки при развороте стенки объекта на некоторый угол.
Устройство позволяет регистрировать все виды реакции объекта при произвольном направлении воздействия динамической нагрузки.
Формула изобретения Устройство для измерения деформаций стенок объекта, ограничивающих замкнутый объект, содержащее трехзвенную систему взаимосвязанных рычагов, предназначенных для восприятия деформаций стенок объекта, два амортизатора, каждый из которых связан с соответствующим узлом соединения рычагов и предназначен для крепления к недеформируемым стенкам объекта, два измерителя углового положения рычагов, размещенные в узлах их соединения, отличающееся тем, что. с
целью повышения точности измерения за счет увеличения числа степеней свободы и количества измерителей углового положения рычагов, оно снабжено первой телескопической штангой, один конец которой соединен с одним из крайних рычагов, а другой конец предназначен для жесткого соединения со стенкой объекта, второй телескопической штангой, один -конец которой соединен с вторым крайним рычагом, а другой конец предназначен для соединения со стенкой объекта посредством подшипника, установленными в узлах соединения рычагов и узлах соединения штанг с рычагами
соединительными элементами коробчатой формы, двумя дополнительными амортизаторами, каждый из которых связан с соответствующим узлом соединения штанги с рычагом и предназначен для крепления к
недеформируемым стенкам объекта, третьим измерителем углового положения рычагов, установленным на втором конце второй телескопической штанги, четвертым и пятым измерителями углового положения рычагов, каждый из которых размещен в соответствующем узле соединения рычагов и установлен на элементе коробчатой формы, четырьмя дополнительными измерителями углового положения рычагов,
ра, мещенным1 по дза j,a каждом элементе коробча.ой формы s узлах соединения штанг с рычагами во ЗЭРПМНГ перпендикулярных плоскостях, каждый из двух измэри- телей углового положения рычагов,
размещенных в узпах их соединения, установлен на элементе коробчатой формы в плоскости соответствующего четвертого или пятого измерителя углового положеьия рычагов, а все амортизаторы выполнены резиновыми.
M/U
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сейсмоизоляции объектов и амортизационное устройство (варианты) для его осуществления | 2022 |
|
RU2787418C1 |
| Адаптивная система сейсмозащиты объектов (варианты) | 2023 |
|
RU2820180C1 |
| Адаптивная система сейсмозащиты объектов | 2024 |
|
RU2840271C1 |
| Адаптивная система сейсмозащиты объектов | 2024 |
|
RU2840272C1 |
| Амортизационное устройство для сейсмоизоляции объектов (варианты) | 2023 |
|
RU2799276C1 |
| ЗАДНЯЯ ПОДВЕСКА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2696049C1 |
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 1995 |
|
RU2083362C1 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| КОРОБЧАТЫЙ МОДУЛЬ ПОДВЕСКИ И СОДЕРЖАЩАЯ ЕГО СИСТЕМА ПАРАМЕТРИЧЕСКОГО ШАССИ ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2009 |
|
RU2473444C2 |
| АГРЕГАТ ОТСЛЕЖИВАНИЯ И ВМЕШАТЕЛЬСТВА ДЛЯ ЖИВОТНОВОДЧЕСКОГО ПОМЕЩЕНИЯ | 2019 |
|
RU2804383C2 |
Изобретение относится к измерительной технике, а более конкретно к технике измерения деформаций в строительных конструкциях при воздействии кратковременных динамических нагрузок. Цель изобретения - повышение точности измерения за счет увеличения числа степеней свободы и количества измерителей углового положения рычагов. Устройство содержит пятиз- венную систему рычагов, которые соединены посредством соединительных элементов коробчатой формы и на которых установлены во взаимно перпендикулярных плоскостях измерители углового положения Концы крайних рычагов через телескопические штанги соединены с исследуемыми оболочками сооружения. Один из крайних рычагов соединен с оболочкой сооружения посредством подшипника. Всего в устройстве содержится четыре соединительных элемента с измерителями углового положения для последовательной регистрации передающейся деформации от одной стенки объекта к другой. Устройство позволяет регистрировать все виды реакции объекта при произвольном направлении воздействия динамической нагрузки 2 ил. сл С
I
/
г xix / -- / У
/J $
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3899922 | |||
| ПИЛЬНЫЙ СТАНОК ДЛЯ ВАЛКИ ЛЕСА И ПОПЕРЕЧНОЙ РАСПИЛОВКИ | 1921 |
|
SU601A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР Me 1577464, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
