Область техники, к которой относится изобретение
Настоящее изобретение относится к оборудованию и технологиям, применяемым в области животноводства, в частности - для отслеживания животноводческого помещения и проживающих в нем животных.
Уровень техники
В связи с увеличением размера ферм и недостатком персонала, который может выполнять задачи по обслуживанию помещений, их очистке, кормлению животных, раздаче подстилки и т.п., фермеры делают выбор в пользу решений, направленных на повышение автоматизации указанных задач посредством специально предназначенного для этого оборудования. В прошлом применяли разнообразные автономные устройства, например, устройства формирования подстилки путем ее раздачи, устройства кормления, уборочные устройства и т.п. Эти разнообразные опробованные и испытанные устройства в настоящее время вошли в повседневный обиход. Однако для того, чтобы полностью оборудовать хозяйство этими разнообразными единицами оборудования, нужны существенные капиталовложения, которые мелкие и средние хозяйства не могут себе позволить.
Некоторое оборудование, в частности - некоторые устройства кормления и раздачи материалов подстилки, устанавливают с соответствующим запасом материалов на рельсы, подвешенные на каркасе помещения, при этом, когда они заполнены, они особенно тяжелы. Поэтому зачастую необходимо выполнить дополнительную работу по усилению каркаса, что влечет дополнительные и весьма существенные затраты.
Раздача подстилки является особо важной операцией, так как она улучшает условия жизни скота. В прошлом данной операции слишком часто не придавали большого значения, в результате чего происходила потеря в выходе продукции из-за плохого санитарного состоянии подстилки. В настоящее время признано, что тщательность, проявляемая при формировании подстилки и поддержании ее в надлежащем состоянии, повышает показатели выхода продукции за счет снижения показателей смертности и заболеваемости в популяции животных и числа больных животных, а также, как следствие, количества вводимых животным лечебных веществ, например, антибиотиков. Опасность чрезмерного применения антибиотиков известна, при этом недавние исследования показали, что рост устойчивости патогенных бактерий к этим веществам в ближайшие годы станет причиной особенно высокого показателя смертности, как в популяциях животных, так и населения, так как некоторые возбудители преодолеют видовой барьер. Поэтому у фермеров существует потребность в сокращении применения указанных лечебных веществ, как для снижения расходов, так и для удовлетворения запросов потребителей.
В большинстве случаев, распределение подстилки возможно только в присутствии животных, так как их невозможно удалить из животноводческого помещения либо из-за возраста, либо из-за риска инфицирования извне. В данной ситуации автономное выполнение операции раздачи подстилки с помощью известного оборудования невозможно, при этом фермер должен управлять ею во избежание попадания на животных разбрасываемых подстилочных материалов, что может впоследствии привести к раздражениям и инфекциям дыхательных путей, глаз и слуховых проходов, как под действием пыли, образующейся в ходе данной операции, так и бактерий, которые может переносить эта пыль.
Необходимо регулярно ухаживать за свежеизготовленной подстилкой для обеспечения комфортного состояния животных. Уход обычно осуществляют путем добавления подстилочных материалов в наиболее загрязненные и наиболее увлажненные области. В данном случае, работа по уходу, состоящая в распределении подстилочных материалов, зачастую - в присутствии животных, в настоящее время может происходить только под надзором и управлением фермера, а не автономно и избирательно с помощью специально предназначенного для этого оборудования. Эти операции весьма затратны по времени, поэтому раздачей добавочной подстилки либо пренебрегают, либо используют роботы-раздатчики подстилки по всему зданию или в некоторых заранее заданных зонах здания, без возможности проведения различия между санированными зонами и загрязненными или увлажненными зонами. В результате, санированные зоны оказываются без нужды покрыты подстилочными материалами, что приводит к финансовым потерям. И наоборот, загрязненные или увлажненные зоны могут не быть достаточно покрыты. Данная ситуация приводит к возникновению постоянно увлажненных зон, что во многих случаях является причиной появления пододерматита.
Поддержание подстилки в удовлетворительном санированном состоянии также включает в себя операции аэрации с применением рыхлящего оборудования. Оборудование данного типа, управляемое фермером, предназначено для разрыхления подстилки для ее аэрации и, в частности, снижения риска выброса аммиака. Однако такое разрыхление зачастую приводит к выходу на поверхность патогенных возбудителей различных заболеваний, например, пододерматита. Поэтому операцию аэрации нужно выполнять совместно с операцией санации подстилки. Однако последнюю операцию выполняют не так часто из-за недостатка ресурсов или времени, в связи с чем возможно распространение патогенных возбудителей по всему помещению. Известно рыхлящее устройство с возможностью автономного перемещения по полу в животноводческих помещениях между животными и выполнения, наряду с разрыхлением подстилки, ее санации путем опрыскивания дезинфицирующим средством. Для обеспечения возможности перемещения в животноводческом помещении без риска для животных, данное устройство оснащено камерой и бортовыми электронными средствами анализа изображений и искусственного интеллекта, наличие которых может затруднять полную дезинфекцию данного оборудования. Кроме того, условия окружающей среды в животноводческом помещении требуют защиты или даже усиления оборудования для направления данного устройства, что еще больше увеличивает его стоимость. И наконец, устройство данного типа выполнено с возможностью передвижения только с очень низкой скоростью и только в дневное время, чтобы не беспокоить спящих животных, внезапное пробуждение для которых, как известно, является причиной стресса. Поэтому возможности его применения ограничены и не могут быть расширены до постоянного отслеживания помещений и животных. Также, поскольку устройство расположено на полу, трудно получить изображение помещения в целом или увеличенное изображение его элементов.
Операцию формирования подстилки систематически выполняют после операций, направленных на полную очистку и дезинфекцию животноводческого помещения. Это дает основание предполагать, что операция формирования подстилки может ухудшить гигиенические условия помещений, если подстилка не была дезинфицирована перед ее распределением. Гигиенические условия здания также может ухудшить оборудование, применяемое для операции раздачи подстилки. На практике, некоторые единицы оборудования, например, тягачи, применяют за пределами здания, в связи с чем, когда они входят в здание, они могут занести в него патогенные возбудители.
В настоящее время, для улучшения условий жизни животных, в некоторых государствах запрещено кастрировать свиней, дебикировать сельскохозяйственную птицу, удалять когти и подвергать сельскохозяйственных животных иным физическим изменениям. Подобные меры, помимо беспорядочных половых сношений между животными, могут иметь и иные негативные последствия, так как по природе своей они способствуют поддержанию у животных повышенного уровня агрессивности в отношении своих собратьев. Единственный способ снизить агрессивность животных - это развлечь их. Согласно наблюдениям, добавление подстилки производит развлекательный эффект, который может снизить агрессивность. Выдача корма на недавно обновленную подстилку производит тот же эффект. Однако из-за недостатка средств у фермеров данный прием применяют редко.
Таким образом, имеющееся в животноводческом помещении оборудование обычно предназначено для какой-либо конкретной операции.
В патентной заявке ЕР 3066916 раскрыта подвесная тележка для стойл, содержащая контейнер, образующий резервуар для предназначенного к раздаче подстилочного материала, и раздаточную систему для раздачи подстилки в место раздачи, при этом подвесная тележка дополнительно содержит систему обнаружения, которая может обнаруживать присутствие животного в месте раздачи и, в случае его обнаружения, запрещать раздачу подстилки.
Кроме того, в патентной заявке WO 2017/141155 раскрыта система проверки и отслеживания зоотехнических животноводческих работ. Система содержит транспортное средство с возможностью передвижения по пути, примыкающему к птицеводческому пространству, образованному клеточными батареями, группу датчиков и камеру, установленные на транспортном средстве. В первом варианте осуществления транспортное средство установлено на шасси, выполненном с возможностью передвижения поверх клеточной батареи, при этом на шасси установлены кормораздаточные бункеры. Во втором варианте осуществления транспортное средство образовано автоматизированным устройством с возможностью передвижения по полу вдоль батарей.
Тележка и пары систем, раскрытые в вышеуказанных документах, имеют недостатки, связанные с транспортировкой контейнеров предназначенных к раздаче материалов. С учетом веса, который они должны выдерживать, опорные конструкции, например, направляющие рельсы и, возможно, подвески для этих рельс на каркасе здания должны иметь относительно большие сечения, чтобы выдерживать механические нагрузки. Кроме того, конструктивное решение таких тележечных систем не предусматривает возможность выполнения ими каких-либо иных задач, кроме раздачи подстилочных материалов или отслеживания помещения.
Раскрытие сущности изобретения
Задачей настоящего изобретения является предложение решения для вышеуказанных задач.
Для этого предложен агрегат отслеживания и вмешательства для животноводческого помещения, содержащий:
- передвижной блок отслеживания, оснащенный средствами отслеживания животноводческого помещения и проживающих в нем животных, при этом предусмотрена возможность определения географических координат указанного блока в помещении относительно исходной точки,
- по меньшей мере один передвижной модуль вмешательства, выполненный с возможностью приведения в действие и управления посредством указанного блока отслеживания, при этом когда модуль вмешательства бездействует, он установлен в месте хранения,
- и указанный блок отслеживания, и указанный модуль вмешательства содержат взаимодействующие механические соединительные средства для соединения друг с другом, выполненные с возможностью блокирования и разблокирования, и
- указанный блок отслеживания выполнен с возможностью непрерывного отслеживания помещения и животных, не будучи при этом соединен с модулем вмешательства или одним из модулей вмешательства.
Следует понимать, что агрегат отслеживания и вмешательства не предназначен исключительно для выполнения какой-либо конкретной задачи, а может выполнять самые разные задачи, в частности - в рамках работ, относящихся к животноводству.
Также следует понимать, что каждый модуль вмешательства не обязательно должен быть оснащен какими-либо автономными средствами или движущими средствами, так как его автономность в части энергии и/или способности к передвижению обеспечивает блок отслеживания. Данная схема значительно снижает стоимость каждого модуля и общий объем капиталовложений. Таким образом, оборудование, оснащенное всеми необходимыми модулями для надлежащего управления фермой, становится доступным для хозяйств любого, даже самого скромного, размера.
Кроме того, результатом указанных мер также является значительное облегчение блока отслеживания - до массы менее 50 кг. Следствием такого облегчения является снижение энергопотребления. Еще одно следствие снижения массы состоит в облегчении перемещения блока отслеживания. Другое следствие снижения массы состоит в ускорении перемещения блока отслеживания.
Другой признак изобретения состоит в том, что блок отслеживания содержит средство приведения его в движение по маршруту.
Схема данного типа делает блок отслеживания самодвижущимся, при этом источник энергии, необходимый для средства приведения в движение, может быть встроенным или удаленным.
Встроенный источник энергии может быть образован одной или несколькими батареями. Удаленный источник энергии может быть соединен со средством приведения в движение подходящими проводками, которые могут быть образованы электропроводниками, являющимися источником электроэнергии, или транспортными трубами для текучей среды (масла или воздуха), действующими как пневматический или гидравлический источник энергии.
Согласно альтернативному признаку изобретения, блок отслеживания не содержит средство приведения в движение, а выполнен с возможностью буксирования по маршруту моторизованной тележкой. Тележка и блок отслеживания прикреплены друг к другу с возможностью разъединения, например, болтами, или без возможности разъединения, или, на практике, с помощью быстродействующих соединительных средств, например, выполненных с возможностью блокирования и разблокирования. Эти средства можно блокировать и разблокировать либо вручную, либо с помощью множества исполнительных механизмов, приводимых в действие и управляемых дистанционно посредством блока отслеживания или блока управления и обработки.
В одной разновидности, блок отслеживания буксируют на тросе, образующем бесконечный ремень, протянутый между ведомым шкивом и ведущим шкивом, соединенным с приводом для приведения во вращение.
Согласно другому признаку изобретения, агрегат отслеживания оснащен блоком обработки, управления, анализа и диагностики, выполненным с возможностью осуществления связи с блоком отслеживания, при этом указанный блок обработки выполнен с возможностью анализа данных и сигналов, испускаемых по меньшей мере средством отслеживания, содержащимся в блоке отслеживания, анализа этих сигналов, выполнения диагностики и, при необходимости, приведения в действие блока отслеживания и управления им для управления вмешательством. Например, блок обработки данного типа включает в себя по меньшей мере один микропроцессор или что-либо подобное, оснащенный программными средствами искусственного интеллекта.
Согласно дополнительному признаку изобретения, блок обработки содержится в блоке отслеживания, но согласно альтернативному признаку изобретения, указанный блок отслеживания установлен на удаленной станции. Согласно данному признаку, между указанным блоком отслеживания и блоком обработки установлены средства беспроводной или проводной связи, которые сами по себе известны. Аналогичным образом, часть блока обработки может быть установлена на блоке отслеживания, а другая его часть - на удаленной станции. При данной рассредоточенной конфигурации, множество блоков отслеживания, установленных в разных животноводческих помещениях, могут быть связаны одним и тем же блоком обработки или его рассредоточенной частью.
Согласно другому признаку изобретения, блок отслеживания содержит по меньшей мере одну камеру отслеживания, выполненную с возможностью выдачи изображений помещения и проживающих в нем животных, при этом блок обработки содержит средства анализа изображений. Средства анализа изображений по существу состоят из подходящих программных средств искусственного интеллекта, содержащихся в блоке обработки.
Согласно дополнительному признаку, блок отслеживания агрегата отслеживания оснащен камерой отслеживания тепловизионного типа, и/или 3D камерой, и/или терагерцовой камерой, и/или инфракрасной камерой.
Важной характеристикой тепловизионных камер является способность выдачи изображений, наиболее яркие участки которых соответствуют различным инфракрасным излучениям от тел. Такие схемы отслеживания позволяют отслеживать помещения, оборудование в них, состояние как подстилки, так и животных, а также их температуру и поведение для обнаружения любых аномалий, служащих основанием для вмешательства или оповещения. Средства анализа изображений данного типа по существу состоят из программных средств искусственного интеллекта.
Согласно другому признаку изобретения, блок отслеживания содержит по меньшей мере один датчик измерения количества аммиака, и/или датчик измерения количества углекислого газа, и/или датчик измерения количества кислорода, и/или датчик измерения температуры, и/или датчик измерения влагосодержания, и/или расходомер, и/или анемометр, и/или датчик типа «черный шар», и/или микрофон, и/или инфразвуковой датчик, и/или датчик пыли и иных частиц. Данные, выданные указанными датчиками, обрабатывает блок обработки и управления, опционально с помощью программных средств искусственного интеллекта, которыми оснащен блок обработки.
Агрегат отслеживания, с помощью средств отслеживания, транспортируемых блоком отслеживания, может обнаруживать аномалии любого типа. Они могут относиться к оборудованию и окружающей среде животноводческого помещения, или к по существу целому стаду, или к группе особей стада, или к по существу одной из особей стада.
Согласно дополнительному признаку изобретения, фермер получает извещения об этих аномалиях посредством известных средств связи, например, беспроводных средств, включающих в себя по меньшей мере один передатчик, содержащийся в блоке отслеживания, и по меньшей мере один дистанционный приемник, установленный в месте нахождения фермера или носимый им с собой. Исключительно в качестве примера, средства связи могут представлять собой излучатель GSM (англ. Global System For Mobile Communications -Глобальной системы мобильной связи) и мобильный телефон фермера. Средства связи могут быть проводными для снижения воздействия беспроводных электромагнитных волн на животных.
После анализа аномалий блоком обработки, возможно - с помощью программных средств искусственного интеллекта, которыми он оснащен, агрегат отслеживания и вмешательства может автономно запустить любые вмешательства, имеющие целью их уменьшение или устранение. Так, согласно другому признаку изобретения, после диагностики аномалии, оперативно-диагностический блок обработки дает команду перемещения блока отслеживания к области хранения соответствующего обрабатывающего модуля, дает команду соединения указанного модуля с указанным блоком, дает команду перемещения указанного блока отслеживания и модуля к участку вмешательства, организует вмешательство и управляет им.
Аномалии, относящиеся к оборудованию, могут, например, представлять собой протечки воды из-за повреждения водопровода, аномальные картины теплового потока с аномально низкой или, наоборот, высокой температурой, свидетельствующей, например, об отказе отопительного оборудования или, по существу, о возникновении пожара. Температурные аномалии обнаруживают с помощью тепловизионной камеры, которую содержит блок отслеживания, и/или датчиков температуры и программных средств искусственного интеллекта, которые содержит блок обработки. Прочие аномалии могут обнаруживать датчики влаги, датчики углекислого газа, датчики аммиака и т.п. Если блок обработки и управления соединен с оборудованием животноводческого помещения с возможностью осуществления связи и управления, то после обнаружения протечки на клапанах водоснабжения, он может сработать для перекрытия подачи воды. Аналогичным образом, в случае наличия избыточной влаги под оросительными трубопроводами, блок обработки может воздействовать на давление подачи воды в эти трубопроводы, а также на средства регулирования их высоты относительно пола. В случае аномальной температуры в помещении, блок обработки и управления может воздействовать на элементы вентиляции помещения и на отопительное оборудование. Возникновение пожара может быть обнаружено тепловизионной камерой или каждой из них, а также газовыми датчиками, которыми оснащены как помещения, так и блок отслеживания. В этих условиях блок отслеживания генерирует оповещение для экстренных служб, при этом данное оповещение может представлять собой голосовое сообщение с указанием места пожара. Борьбу с пожаром или его возникновением осуществляют с помощью самосрабатывающих средств пожаротушения, которыми оснащено животноводческое помещение; самосрабатывающие средства обычно образованы водопроводами и спринклерами, закупоренными ампулами, выполненными с возможностью разрушения в случае значительного повышения температуры.
Для оказания поддержки средствам пожаротушения, которыми оснащено животноводческое помещение, согласно другому признаку изобретения, агрегат отслеживания выполнен со средством пожаротушения. Согласно дополнительному признаку изобретения, средство пожаротушения образовано огнетушащим средством, содержащимся в блоке отслеживания и управляемым им. Согласно альтернативному признаку изобретения, предложен модуль пожаротушения, содержащий ствол, который может быть телескопическим, соединенный с рукавом подачи огнетушащего вещества, при этом указанный рукав соединен со специально выделенным удаленным источником за пределами животноводческого помещения, при этом указанный специально выделенный источник оснащен резервуаром огнетушащих веществ. Огнетушащее вещество может включать в себя воду, пену или дисперсное негорючее вещество, транспортируемое текучей средой под давлением. Дисперсное вещество может включать в себя песок, а текучая среда под давлением может представлять собой воздух или по существу негорючий газ. Сжатая текучая среда также может включать в себя негорючую жидкость, например, воду.
Ствол модуля пожаротушения может быть телескопическим и быть консольно закреплен своим ближним участком на револьверной головке модуля для обеспечения возможности его ориентирования по азимуту и углу возвышения. За счет этого зона досягаемости ствола из одного и того же положения модуля может включать в себя разные точки здания.
Согласно дополнительному признаку, дальний конец ствола содержит отсечной клапан, выполненный с возможностью перемещения посредством привода, который содержит дальняя секция, и с возможностью приведения в действие блоком обработки, причем механическое средство втягивания прикреплено к обеим секциям - дальней и ближней - ствола, с возможностью приведения его в действие и управления им блоком обработки для принудительного втягивания ствола, когда указанное средство включено.
Для выдвижения ствола, указанный клапан отсекают и вводят в ствол текучую среду под давлением, при этом степенью выдвижения ствола управляет блок обработки путем воздействия на механическое средство втягивания. Далее можно открыть клапан путем воздействия на него соответствующего привода для подачи огнетушащей текучей среды.
Согласно другому признаку изобретения, механическое средство втягивания образовано тяговым канатом, прикрепленным свободным концом к дальней секции ствола, и наматывателем каната, прикрепленным к ближней секции, при этом указанный наматыватель каната содержит намоточный барабан, на который наматывают канат, привод, соединенный с намоточным барабаном, и кодовый датчик положения (т.н. энкодер), соединенный с барабаном или с мотором, при этом кодовый датчик положения может быть импульсного, аналогового или иного типа. Кодовый датчик положения может выдавать информацию в форме сигналов степени наматывания или разматывания каната и, соответственно, степени выдвижения или втягивания ствола. Втягивание ствола также можно обеспечить путем создания вакуума во внутреннем объеме.
Раскрытый модуль пожаротушения обеспечивает преимущество, состоящее в возможности его применения для других целей благодаря высокой степени универсальности. Так, согласно дополнительному признаку изобретения, дальний конец ствола оснащен датчиком температуры для измерения температуры конкретной точки здания или подстилки, при этом сигналы датчика температуры поступают в блок обработки. Он также может служить для измерения наружной температуры тела животных путем приближения датчика температуры либо ввода его в контакт с кожей животных. В одной из разновидностей, датчик температуры выполнен с возможностью дистанционного измерения температуры каждого животного. На свободном конце ствола также могут быть установлены неинвазивные датчики измерения физиологических параметров животных.
Согласно другому признаку изобретения, дальний конец ствола данного модуля или модуля того же типа может быть оснащен средством очистки, например, очистительным соплом. Таким образом, на основе анализа изображений, выданных по меньшей мере одной из видеокамер, которыми оснащен блок отслеживания, можно очищать только загрязненные зоны помещения. Это также позволит существенно сэкономить чистящие средства. Чистящие средства могут представлять собой воду или водные растворы с дезинфицирующим средством. Они также могут включать в себя подходящие дезинфицирующие газы.
Конец ствола также может быть оснащен камерой, сигналы которой обрабатывает блок обработки. Это повышает точность очистки.
Согласно другому признаку изобретения, конец ствола может быть оснащен по меньшей мере одним датчиком количества аммиака, и/или датчиком количества углекислого газа, и/или датчиком количества кислорода, и/или датчиком температуры, и/или датчиком влаги, и/или фотометром, и/или анемометром, и/или датчиком типа «черный шар», и/или микрофоном, и/или датчиком пыли.
Согласно альтернативному признаку изобретения, ближний конец ствола соединен с обводным (байпасным) клапаном, содержащимся в блоке отслеживания и управляемым блоком обработки; один из каналов обводного клапана соединен с выделенным источником огнетушащего вещества, а другой его канал соединен с вакуумным насосом, связанным с газоанализатором, содержащимся в блоке отслеживания. В результате воздействия на обводной клапан происходит соединение внутреннего объема ствола с вакуумным насосом, а в результате открытия концевого клапана и включения воздушного насоса происходит всасывание воздуха в ствол для последующей подачи в анализатор и анализа.
Аномалии поведения, которыми может страдать все стадо, несколько животных или по существу одна особь, обнаруживают путем анализа с помощью программных средств искусственного интеллекта движений соответствующего животного или животных по изображениям, выданным камерой или каждой из камер. Нервозное состояние самки может указывать на то, что она находится в половой охоте, а у беременной самки - на начало родов. Если животные сбиваются вместе, это может указывать на слишком низкую температуру, а рассредоточение животных вдоль стен помещения - на слишком высокую температуру в помещении. Аналогичным образом, неровная походка, например, прихрамывание, может быть признаком ран ног. Если животные сбиваются в стадо, то это может быть признаком проникновения постороннего в животноводческое помещение, например, хищника. Это также может быть признаком проникновения постороннего человека, отличного от фермера.
Указанные различные типы аномалий хорошо известны фермеру, при этом их будут регистрировать в базе данных, относящейся к блоку обработки. Блок обработки может легко идентифицировать больное животное по идентификационным биркам, которыми снабжено или будет снабжено животное, а также по технологии распознавания лиц или, в более широком смысле, тел. В случае сельскохозяйственной птицы, распознавание осуществляют по ошейникам на них. Животное можно идентифицировать путем считывания с изображений, созданных одной из камер, идентификационных кодов, записанных на бирках, или считывания чипа радиочастотной идентификации (РЧИД, англ. RFID, Radio Frequency Identification), содержащегося в одной из идентификационных бирок животных, который может быть пассивным или активным, с помощью РЧИД-считывателя. Распознавание лица животного или, в более общем смысле, всех животных, можно осуществлять посредством блока обработки с помощью программных средств искусственного интеллекта по изображениям, созданным видеокамерой или каждой из них.
Анализ изображений с помощью программных средств искусственного интеллекта также позволяет оценивать массу тела каждого идентифицированного животного и отслеживать то, как происходит его откорм. Так, слишком низкая степень откорма в конце заранее определенного периода может свидетельствовать о плохом состоянии здоровья или проблеме с кормлением. При этом в случае слишком высокой степени откорма нужно будет уменьшить кормление.
Посредством камеры и анализа выданных ею видеоизображений с помощью программных средств искусственного интеллекта также можно осуществлять поиск мертвых животных для их транспортировки к средству удаления. Функцию поиска улучшает применение тепловизионной камеры или иной подходящей камеры. Для транспортировки мертвых животных, согласно дополнительному признаку, агрегат отслеживания оснащен самодвижущимся напольным модулем, выполненным с возможностью передвижения по полу помещения, при этом блок отслеживания осуществляет беспроводное дистанционное управление указанным модулем, при этом указанный дистанционно-управляемый модуль содержит захватные устройства для подбора мертвых животных. Такой модуль также может служить для сбора больных животных и их транспортировки в лечебное отделение.
В качестве альтернативы, указанный модуль оснащен бесконечной лентой для сбора мертвых или больных животных.
Согласно другому признаку изобретения, один из модулей выполнен с возможностью распределения раздаваемых подстилочных материалов и иных материалов, например, корма, и оснащен распределительным средством, например, распределительной насадкой, снабжаемой по пневматическому или механическому контуру транспорта материалов из удаленного специально выделенного источника, выполненного с возможностью размещения за пределами животноводческого помещения, при этом указанная насадка выполнена с возможностью ориентирования и по азимуту, и по углу возвышения, при этом ориентацией насадки управляет блок обработки на основе сигналов, выдаваемых камерой или камерами и анализируемых подходящими программными средствами искусственного интеллекта. С помощью тепловизионной камеры, которую содержит блок отслеживания, блок обработки может обнаруживать в подстилке загрязненные зоны или зоны пониженной температуры, например, из-за высокого влагосодержания, при этом холодные, или влажные, или загрязненные зоны обычно, но не всегда, расположены под поилками и на уровне доступа из-за пределов помещения, например, дверей и трапов. Путем приведения в действие и управления распределительной насадкой можно восстанавливать покрытие в этих зонах и только в этих зонах подстилочными материалами или материалами, способными поглощать влагу. Это также позволяет экономить подстилочный материал.
Следует отметить, что обнаружение загрязненных зон можно осуществлять с помощью видеокамеры, работающей в видимой области спектра.
Согласно другому признаку изобретения, распределительная насадка распределительного модуля содержит тепловизионную камеру, выполненную с возможностью соединения с блоком отслеживания посредством взаимодействующих электросоединительных средств, которые содержит указанный распределительный модуль и указанный блок отслеживания, при этом оптическая ось оптической камеры параллельна оси насадки. Это позволяет повысить точность покрытия влажных зон.
Согласно другому признаку изобретения, выпускное отверстие распределительной насадки оснащено шарнирно-соединенным направителем, выполненным с возможностью регулирования и связанным с рабочим приводом, управляемым блоком обработки.
Согласно другому признаку изобретения, распределительная насадка является вертикальной.
Согласно другому признаку изобретения, распределительная насадка связана со средством пылеудаления. Это позволяет значительно уменьшить количество пыли, которая может возникать при формировании подстилки. Это также снижает риск инфицирования патогенными возбудителями, переносимыми пылью, и риск раздражения дыхательных путей животных.
Согласно другому признаку изобретения, средство пылеудаления содержит циклонный уловитель.
Согласно другому признаку изобретения, блок отслеживания подвешен посредством роликов по меньшей мере на одном горизонтальном направляющем рельсе, вдоль которого его можно перемещать, и содержит по меньшей мере одно приводное колесо, прижатое к рельсу и приводимое в действие приводом, который содержит рама блока отслеживания, при этом указанный блок отслеживания дополнительно содержит средство управления его положением относительно опорной или исходной точки.
Направляющий рельс установлен над полом и закреплен на каркасе кровли здания или на элементах, закрепленных на нем. Такая компоновка обеспечивает возможность перемещения блока отслеживания над полом, над животными и любыми препятствиями на полу. Это обеспечивает возможность перемещения блока отслеживания из одной точки в другую с высокой скоростью.
Согласно другому признаку изобретения, соединительное средство, содержащееся в блоке отслеживания, образовано телескопической полой штангой, приводимой в выдвинутое или втянутое положение внутренней винтовой парой, оснащенной приводом для приведения в движение винта, при этом нижняя секция штанги содержит на нижнем конце центрирующий конус и снабженные приводом соединительные зацепы, при этом указанный модуль или каждый из них содержит вертикальную штангу на его верхнем конце с охватываемым центрирующим конусом, выполненную с полой соединительной частью для вмещения соединительных зацепов. Данная компоновка обеспечивает возможность опирания модуля вмешательства или каждого из них на пол или на люльку, установленную на полу в заранее определенном месте животноводческого помещения.
Согласно другому признаку изобретения, блок отслеживания содержит датчики деформации (тензометрические датчики), установленные между его кожухом и вертикальной штангой. Данное расположение, в сочетании с применением соответствующего модуля, обеспечивает возможность взвешивания животного. Согласно дополнительному признаку изобретения, данный модуль выполнен с жесткой горизонтальной плитой для взвешивания, содержащей средства соединения с телескопической штангой блока отслеживания в ее центре. Для взвешивания, животное побуждают, различными средствами и методами, взойти на плиту. Для этого на плите можно расположить корм, или воду, или интересные для животного предметы.
Согласно другой разновидности изобретения, модуль взвешивания включает в себя плиту взвешивания, выполненную с жесткими подвесами, содержащими средства соединения со штангой блока отслеживания. Подлежащее взвешиванию животное побуждают войти в люльку для взвешивания.
Согласно другому варианту осуществления, модуль взвешивания расположен в разделенной на отсеки люльке и предназначен для взвешивания мертвых и травмированных животных. Люлька содержит плиту, образующую ее пол, и жесткие подвесы, содержащие раскрытые выше соединительные средства на своих верхних концах.
Согласно другой разновидности, направляющий рельс проходит, через точку сопряжения, у зоны хранения модуля вмешательства или каждого из них, при этом указанный модуль вмешательства или каждый из них подвешен над полом посредством роликов либо в зоне хранения, либо на направляющем рельсе, в зависимости от его положения, при этом соединительные средства включают в себя, с одной стороны, поворотный крюк, шарнирно соединенный с блоком отслеживания и связанный с приводом перемещения, содержащимся в блоке отслеживания и управляемым блоком обработки, и, с другой стороны, соединительное кольцо, содержащееся в модуле вмешательства и выполненное с возможностью вмещения соединительного крюка путем посадки с геометрическим замыканием.
Согласно другому признаку изобретения, плита каждого модуля взвешивания предпочтительно вмещает и удерживает на своей нижней стороне по меньшей мере один датчик температуры, по меньшей мере один датчик влаги и по меньшей мере один датчик для анализа химического состава газов, по меньшей мере один датчик измерения толщины подстилки. Данные средства позволяют контактно измерять температуру и влагосодержание подстилки, а также химический состав возможных выбросов газа. Для этого выдвигают штангу блока отслеживания для приведения указанных датчиков в контакт с подстилкой на очень малом расстоянии от нее или на глубине в пределах указанной подстилки.
В случае выращивания кур-несушек, согласно дополнительному признаку, агрегат отслеживания и вмешательства предпочтительно оснащен дистанционно-управляемым напольным модулем для сбора яиц, отложенных на пол. В одном из вариантов реализации модуль содержит два подборных рычага, образующих V-образную конструкцию в передней зоне, и площадку для приема яиц, образованную между рычагами.
Согласно другому признаку изобретения, передняя часть каждого рычага предпочтительно образована горизонтальным роликом.
Краткое описание чертежей
Прочие преимущества, цели и признаки настоящего изобретения станут ясны из нижеследующего описания предпочтительного варианта осуществления, приведенного в качестве неограничивающего примера со ссылкой на прилагаемые чертежи:
Фиг. 1 - вид спереди предложенного агрегата,
Фиг. 1а - детальный вид агрегата с Фиг. 1,
Фиг. 2 - детальный вид в разрезе блока отслеживания,
Фиг.2а - профиль направляющего рельса,
Фиг. 3 - увеличенный вид распределительной насадки,
Фиг. 4 - вид второго варианта осуществления предложенного агрегата,
Фиг. 5 - схематический вид соединительного средства согласно первому варианту осуществления,
Фиг. 6 - схематический вид точки сопряжения,
Фиг. 7-10 изображают модули взвешивания согласно различным вариантам осуществления,
Фиг. 11 изображает распределительную насадку, связанную со средством пылеудаления,
Фиг. 12 и 13 изображают распределительный модуль,
Фиг. 14 изображает модуль перемещения персонала,
Фиг. 15 изображает модуль чистки щеткой,
Фиг. 16 изображает дистанционно-управляемый модуль подбора мертвых животных,
Фиг. 17 изображает яйцесборный модуль,
Фиг. 18 изображает распределительный и раздаточный модуль для загрузки кормушки,
Фиг. 19 изображает модуль перемещения и манипулирования,
Фиг. 20 - вид телескопической штанги с захватом,
Фиг. 21 - вид инструмента сбора яиц, предназначенного для установки на штанге с Фиг. 20,
Фиг. 22 - вид камеры, предназначенной для установки на штанге с Фиг. 20,
Фиг. 23 - вид датчиков с общей опорой для установки на штанге с Фиг. 20,
Фиг. 24 изображает устройство перемещения рельсов лотков, предназначенное для установки на штанге с Фиг. 20,
Фиг. 25 - вид ветеринарного устройства с исследовательскими зондами для установки на штанге с Фиг. 20,
Фиг. 26 изображает штангу с Фиг. 8, соединенную с узлом перемещения, установленном на приводном устройстве,
Фиг. 27 изображает дистанционно-управляемый модуль согласно другому варианту осуществления,
Фиг. 28 изображает клеть для сбора травмированных животных, установленную на дистанционно-управляемом модуле с Фиг. 27,
Фиг. 28а изображает клеть для сбора мертвых животных, установленную на дистанционно-управляемом модуле с Фиг. 27,
Фиг.29 - разрез раздатчика подстилки, предназначенного для установки на дистанционно-управляемом модуле с Фиг. 27,
Фиг. 30 изображает разрыхляющее устройство, предназначенное для установки на дистанционно-управляемом модуле с Фиг. 27,
Фиг. 31 изображает пробоотборное устройство, установленное на дистанционно-управляемом модуле с Фиг. 27,
Фиг. 32 - вид устройства 68, выполненного с возможностью сбора силоса, разбросанного животными на участке потребления.
Осуществление изобретения
Фиг. 1 изображает агрегат отслеживания и вмешательства для животноводческого помещения, содержащий:
- передвижной блок 1 отслеживания, оснащенный средствами отслеживания животноводческого помещения и проживающих в нем животных, при этом предусмотрена возможность определения географических координат указанного в блока в помещении относительно исходной точки,
- по меньшей мере один передвижной модуль 2а, 2b, 2с, 2d, 2е, 2f, 2g, 2h вмешательства, выполненный с возможностью приведения в действие и управления посредством указанного блока 1 отслеживания, при этом когда модуль вмешательства бездействует, он установлен в месте хранения,
- при этом и указанный блок 1 отслеживания, и указанный модуль вмешательства содержат взаимодействующие механические соединительные средства для соединения друг с другом, выполненные с возможностью блокирования и разблокирования, при этом указанный блок 1 отслеживания выполнен с возможностью непрерывного отслеживания помещения и животных, не будучи при этом соединен с модулем вмешательства или одним из модулей вмешательства.
Понятие «взаимодействующие механические соединительные средства, выполненные с возможностью блокирования и разблокирования» следует понимать, как означающее любые средства, выполненные с возможностью создания, путем взаимодействия друг с другом, механического соединения, которое не предназначено для того, чтобы быть постоянным, при этом указанные механические средства выполнены с возможностью взаимодействия друг с другом так, чтобы, при необходимости, их можно было собрать друг с другом для создания механического соединения или наоборот - отделить друг от друга для разрыва этого соединения, которое может быть создано за счет уплотнения, сцепления, с помощью магнитного поля или иных средств.
Предложенный агрегат отслеживания также содержит блок 3 обработки, выполненный с возможностью осуществления связи с блоком 1 отслеживания, при этом указанный блок 3 обработки выполнен с возможностью приема данных и сигналов, испускаемых по меньшей мере средством отслеживания, содержащимся в блоке 1 отслеживания, анализа этих данных и сигналов, постановки диагноза и, при необходимости, приведения в действие блока 1 отслеживания и управления им для управления вмешательством. Блок 3 обработки предпочтительно включает в себя один или несколько микропроцессоров или что-либо подобное и программные средства искусственного интеллекта для анализа данных и сигналов, выполнения диагностики и организации вмешательств. Блок 3 обработки выполнен с возможностью приема видео-, аудио- или иных сигналов.
В частном примере осуществления на Фиг. 1-4, блок 1 отслеживания подвешен на направляющем рельсе 4, установленном над полом на некотором расстоянии от последнего по горизонтали или с наклоном, при этом в одной из разновидностей блок 1 отслеживания конструктивно выполнен с возможностью передвижения по полу животноводческого помещения и, соответственно, содержит средства качения, все или некоторые из которых снабжены приводом, при этом все или некоторые из них являются ведущими.
Блок 1 отслеживания предпочтительно получает электроэнергию от комплекта встроенных батарей, однако он может получать такую энергию, частично или полностью, из удаленного источника энергии. В этом случае, передача энергии от источника блоку 1 происходит посредством электропроводников, которые могут быть встроены в направляющий рельс 4 или образованы им, или образованы многожильным электрическим кабелем.
В варианте осуществления на Фиг. 1 направляющий рельс 4 образован трубчатым профилем четырехугольного поперечного сечения и содержит продольный паз 40, выполненный в его нижней стенке, которая образует по обе стороны от паза 40 две внутренние направляющие дорожки 41 равной ширины, предпочтительно - криволинейные.
Изобретение, разумеется, не ограничено указанной конкретной формой направляющего рельса 4, который может иметь круглое или овальное поперечное сечение или быть по существу образован сплошным или полым профилем любого типа, например, IPN (Европейская стандартная балка). Блок 1 отслеживания также может быть установлен на двух параллельных рельсах для повышения его механической устойчивости.
Блок 1 отслеживания содержит металлическое шасси 10, образующее тележку, выполненную по существу по форме параллелепипеда, содержащую верхнюю стенку, нижнюю стенка, две вертикальные боковые стенки, параллельные направлению перемещения указанного блока и две поперечные стенки, установленные вертикально над этим направлением. По меньшей мере одна из двух боковых стенок предпочтительно выполнена съемной для доступа во внутренний объем тележки. Средства 11 направления вдоль направляющего рельса 4 прикреплены к тележке 10. Указанные средства предпочтительно образованы средствами 110 качения в виде роликов и расположены рядами на вертикальных опорах 111, прикрепленных к верхней стенке шасси 10 указанного блока 1 обработки. Ряды средств качения находятся в зацеплении с направляющим рельсом 4, а средства 110 качения оперты на направляющие дорожки 41, из которых состоит направляющий рельс 4. Опоры 111 для рядов средств качения находятся в зацеплении с пазом 40 и проходят поперечно относительно его.
Каждая вертикальная опора 111 предпочтительно продлена в нисходящем направлении резьбовым стержнем в зацеплении со сквозным проемом, сформированным в верхней стенке тележки 10. В тележке 10, резьбовой стержень вмещает по меньшей мере одно упругое средство и гайку. Упругое средство навинчено на резьбовой стержень и обжато между гайкой и нижней стороной верхней стенки тележки.
Блок 1 отслеживания содержит средство приведения в движение вдоль направляющего рельса 4. Средство приведения в движение образовано приводным колесом 12, соединенным с тяговым приводом 13, прикрепленным к тележке 10. Колесо 12 прикреплено к оси, находящейся в зацеплении с двумя направляющими подшипниками, прикрепленными соответственно к двум боковым стенкам тележки 10, при этом указанная ось соединена одним из двух своих концов с поворотным выходным валом тягового мотора 13. Мотор 13, который может быть электрического типа, прикреплен к соответствующей боковой стенке тележки 10 на ее наружной стороне.
Большая часть приводного колеса 12 находится внутри тележки 10 и зацеплена верхней частью через отверстие, сформированное в верхней стенке указанной тележки 10, с возможностью прижатия, через его бандаж, к наружной стороне нижней стенки направляющего рельса 4. Для выполнения этой операции, гайки, которые содержат резьбовые стержни опор 111 рядов средств 110 качения, перемещают в направлении затягивания. Следует понимать, что путем регулирования степени затяжки гаек можно регулировать уровень давления на бандаж приводного колеса 12, прижимающего его к направляющему рельсу 4.
Каждое упругое средство, относящееся к каждому резьбовому стержню, предпочтительно включает в себя тарельчатую пружину, например, пружину Бельвиля. Данное упругое средство предназначено для поглощения, за счет деформации, возможного излишка толщины, который может иметь место на нижней стороне направляющего рельса 4. В частности, излишки толщины могут быть результатом наличия соединительных элементов между двумя секциями рельса, если указанный направляющий рельс 4 образован несколькими секциями, соединенными друг с другом встык. Излишки толщины также могут быть результатом наличия скоб для подвешивания направляющего рельса 4 к несущему каркасу животноводческого помещения.
Приводное колесо 12 предпочтительно образовано центральным металлическим диском 120, вставленным между двумя боковыми фланцами 121, причем наружная кромка каждого из них, сформированная из синтетического материала, образует бандаж приводного колеса 12. Диаметр центрального диска 120 больше диаметра боковых фланцев 121, при этом диск проходит в направляющий рельс 4 через паз 40 рельса 4. Это обеспечивает надлежащее направление блока 1 отслеживания вдоль рельса 4.
Средство отслеживания, содержащееся в блоке 1 отслеживания, предпочтительно включает в себя устройство 5 получения изображений. Устройство 5 установлено на скобе, прикрепленной к шасси 10 блока 1 отслеживания.
В предпочтительном варианте осуществления устройство 5 включает в себя видеокамеру с возможностью создания черно-белых или цветных изображений, при этом камера может быть связана с одним или несколькими оптическими фильтрами. Устройство 5 получения изображений также может включать в себя тепловизионную видеокамеру. Блок 1 отслеживания может содержать множество устройств получения изображений разных типов. Так, он может содержать по меньшей мере одну камеру с возможностью создания видеоизображений в видимой области и по меньшей мере одну инфракрасную камеру, по меньшей мере одну тепловизионную камеру с возможностью создания изображений в ближней инфракрасной области спектра и терагерцовую камеру с возможностью создания изображений в дальней инфракрасной области спектра. Изобретение, разумеется, не ограничено наличием устройства получения изображений данного типа, при этом возможно применение устройства любого типа. Данное средство позволяет обнаруживать присутствие влажных зон, горячих зон, холодных зон, горячих точек и т.п. в помещении. В качестве реакции на обнаружение влажных зон, в соответствующую зону можно насыпать осушающее вещество или свежую подстилку.
Блок 1 отслеживания также может содержать по меньшей мере одну 3D видеокамеру. Видеосигналы от этих устройств получения изображений обрабатывает блок 3 обработки, а именно - подходящие программные средства искусственного интеллекта, содержащиеся в блоке обработки. 3D камера или каждая из них может служить для отслеживания и проверки откорма каждого животного. Сигналы, полученные от 3D камеры или каждой из них, анализируют программные средства искусственного интеллекта, выполненные с возможностью выведения веса животного и сравнения этого значения веса с предыдущим значением или с опорным значением. Идентификационные данные животного, вес которого отслеживают, можно определить путем считывания бирок, которыми оно снабжено, или, на практике, путем распознавания лица или тела. Бирки можно считывать посредством камеры, если идентификационные данные записаны видимым способом, или посредством РЧИД-считывателя, если идентификационные данные животного записаны на чипе радиочастотной идентификации, содержащемся в бирке.
Блок 1 отслеживания оснащен средством отслеживания, включающим в себя по меньшей мере одно устройство регистрации звука. Устройство может включать в себя микрофон. Микрофон установлен на шасси 10 блока 1 отслеживания. Акустические сигналы могут анализировать подходящие программные средства искусственного интеллекта для их интерпретации. Блок отслеживания также может быть оснащен по меньшей мере одним устройством регистрации инфразвука и устройством регистрации ультразвука.
Блок 1 отслеживания также оснащен средством отслеживания, включающим в себя по меньшей мере один датчик количества аммиака, и/или датчик количества углекислого газа, и/или датчик количества кислорода, и/или датчик температуры, и/или датчик влаги, и/или расходомер, и/или анемометр, и/или датчик типа «черный шар».
Блок 1 отслеживания предпочтительно содержит средство указания его положения вдоль направляющего рельса 4 относительно опорной точки, механически прикрепленное к рельсу 4. В предпочтительном варианте осуществления средство указания образовано ведомым колесом 14, прижатым к направляющему рельсу 4, и средством измерения углового смещения ведомого колеса 14.
Ведомое колесо 14 предпочтительно установлено на поворотном кронштейне 140, шарнирно соединенном с тележкой 10, и прижато к направляющему рельсу 4 упругим средством 141, например, винтовой пружиной. Под действием пружины 141 происходит поворот кронштейна 140 в сторону направляющего рельса 4, что обеспечивает удержание ведомого колеса 14 прижатым к рельсу. Средство измерения углового смещения может, в частности, включать в себя импульсный или аналоговый кодовый датчик положения, соединенный с ведомым колесом 14. Сигналы, испускаемые кодовым датчиком положения, предпочтительно анализирует блок 3 обработки для вычисления положения блока 1 отслеживания и, следовательно, положения модуля вмешательства, соединенного с указанным блоком 1 отслеживания, или каждого из них.
В другом варианте осуществления средства указания положения блока отслеживания ведомое колесо 14 содержит радиальные равномерно распределенные сквозные отверстия, чередующиеся с радиальными сплошными частями, при этом блок 1 отслеживания содержит по меньшей мере одну детекторную ячейку с возможностью обнаружения радиальных отверстий и/или сплошных частей ведомого колеса.
В другом варианте осуществления средство указания положения блока 1 отслеживания включает в себя соединенный с приводным колесом 12 импульсный или аналоговый кодовый датчик положения или нечто подобное. В этом случае блок 1 отслеживания не должен обязательно включать в себя ведомое колесо.
Также возможно одновременное применение средства указания положения, связанного с приводным колесом 12, и средства указания положения, связанного с ведомым колесом 14.
Указанные несколько средств выполнены с возможностью выдачи информации о положении указанного блока 1 отслеживания вдоль рельса относительно исходной точки, образованной механическим упором (не показан), расположенным вдоль направляющего рельса 4 и предназначенным для обнаружения датчиком (не показан), содержащимся в блоке 1 отслеживания.
В одном из вариантов реализации ведомое колесо 14 образовано центральным диском 142, вставленным между двумя боковыми фланцами 143, каждый из которых содержит кромку, выполненную из синтетического материала и образующую бандаж, при этом диаметр центрального диска больше диаметра боковых фланцев. Под действием упругого средства 141 центральный диск 142 проходит в направляющий рельс 4 путем вхождения в зацепление через паз 40 нижней стенки рельса 4, при этом происходит прижатие наружных кромок боковых фланцев 143 к направляющему рельсу 4, а именно - к наружной стороне его нижней стенки. Радиальные сквозные отверстия ведомого колеса 14 предпочтительно сформированы в центральном диске 142.
В другом варианте осуществления средство указания положения блока 1 отслеживания вдоль направляющего рельса 4 образовано, с одной стороны, системой указания расстояния, установленной на рельсе и содержащей метки расстояния, каждая из которых указывает расстояние от исходной точки, и, с другой стороны, устройством считывания меток, содержащихся в системе указания.
В одном из вариантов реализации система указания расстояния образована линейкой разметки, содержащей указания расстояния в виде чисел или условных знаков, при этом считывающее устройство по существу образовано оптическим считывателем, например, камерой, и программными средствами оптического распознавания указаний расстояния.
Как сказано выше, блок 1 отслеживания оснащен средством соединения с модулем вмешательства, при этом каждый модуль вмешательства оснащен ответным соединительным средством, при этом указанные соединительные средства блока отслеживания и каждого модуля выполнены с возможностью взаимодействия путем соединения друг с другом, а также с возможностью блокирования и разблокирования.
В первом варианте осуществления соединительное средство, содержащееся в блоке 1 отслеживания, образовано выдвижной штангой 15, установленной на шасси 10 и приводимой в действие с возможностью выдвижения или втягивания посредством приводного двигательного механизма 16, при этом штанга 15 содержит на нижнем конце средство стыковки для модуля вмешательства, предназначенное для взаимодействия путем стыковки с ответным средством стыковки, установленным на модуле вмешательства или каждом из модулей вмешательства, при этом модуль вмешательства или каждый из них, когда он бездействует, расположен в специально отведенной зоне помещения и размещен либо на полу, либо на размещенной на полу горизонтальной площадке, либо, на практике, размещен в специально предназначенной для этого люльке, размещенной на полу.
В одном из вариантов реализации штанга 15 является полой и телескопической, а приводной двигательный механизм 16 для выдвижения или втягивания находится внутри штанги. Штанга 15 проходит вертикально вниз от шасси 10 блока 1 отслеживания. Телескопическая штанга содержит по меньшей мере две секции штанги: верхнюю 150 и нижнюю 151. Можно видеть, что нижняя секция 151 установлена с возможностью скольжения в верхней секции 150, будучи заблокирована от вращения относительно нее. Обе секции 150, 151 штанги предпочтительно образованы серийно производимыми трубками квадратного поперечного сечения.
В предпочтительном варианте осуществления приводной механизм 16 находится внутри телескопической штанги 15. При этом в предпочтительном варианте осуществления приводной механизм 16 включает в себя:
- мотор 160, прикрепленный к шасси 10 блока 1 отслеживания и установленный в последнем,
- винт 161, установленный в указанных двух секциях 150, 151 штанги и проходящий в осевом направлении внутри них, при этом указанный винт 161 прикреплен своей верхней частью к выходному валу мотора 160 с возможностью приведения им винта во вращение, и
- гайку 162, в зацепление с которой винт 161 введен путем ввинчивания, при этом указанная гайка 162 прикреплена на верхнем конце нижней секции 151 штанги.
За счет данных мер, поступательное перемещение винта 161 блокировано, при этом его можно приводить во вращение с помощью привода. Таким образом, в результате вращения винта в одном или в другом направлении происходит соответственно выдвижение штанги 15 или ее втягивание.
В первом варианте осуществления (Фиг. 1а) средства стыковки, входящие в состав штанги 15 блока 1 отслеживания, образованы центрирующим конусом 152 и захватными клешнями 153, приводимыми в действие по меньшей мере одним приводом 154, при этом средства стыковки, входящие в состав модуля вмешательства или каждого из них, образованы, с одной стороны, центрирующим конусом 20, выполненным с возможностью вмещения центрирующего конуса 152, установленного на штанге 15 блока 1 отслеживания, путем посадки с геометрическим замыканием, и, с другой стороны, по меньшей мере одной полостью 21, выполненной с возможностью вмещения захватных клешней 153 путем посадки с геометрическим замыканием. Геометрическая ось вращения каждого из двух центрирующих конусов 152 и 20 является вертикальной.
В одном варианте осуществления центрирующий конус 152 средств стыковки блока 1 отслеживания является охватываемым, а центрирующий конус 20 средств стыковки модуля вмешательства или каждого из них является охватывающим и сформирован в жестком цилиндрическом корпусе 20а, прикрепленном к конструкции модуля вмешательства. Как показано на Фиг. 1 и 1а, центрирующий конус 152 прикреплен у нижнего конца нижней секции 151 штанги в ее оси.
Средство стыковки, которое содержит штанга 15 блока 1 отслеживания, предпочтительно содержит две противоположные клешни 153, каждая из которых образована поворотным кронштейном и подбирающим пальцем 153а, сформированным у нижнего конца поворотного кронштейна. Поворотный кронштейн каждой клешни 153 шарнирно соединен своим верхним концом со скобой, прикрепленной к нижней секции 151 штанги, с возможностью передвижения из расцепленного положения в положение подбора и наоборот с помощью привода 154, предпочтительно включающего в себя силовой цилиндр. Полость 21, выполненная с возможностью вмещения подбирающих пальцев 153а, предпочтительно образована кольцевой канавкой, выдолбленной в жестком цилиндрическом корпусе 20а с его наружной стороны.
Для соединения с модулем вмешательства, блок 1 отслеживания перемещают вдоль направляющего рельса 4 над указанным модулем вмешательства так, чтобы соединительное средство на его штанге 15 оказалось расположено по вертикали над соединительным средством модуля вмешательства. Далее штангу 15 выдвигают так, чтобы центрирующий конус 152 вошел в зацепление с конусом 20 указанного модуль вмешательства. Далее указанные две захватные клешни 153 приводят в действие посредством силовых цилиндров 154 так, чтобы подбирающие пальцы 153а прошли в канавку 21. Для транспортировки модуля вмешательства, штангу втягивают.
В другом варианте осуществления на Фиг. 5 средства стыковки выдвижной штанги 15 образованы жесткой опорой 152а, прикрепленной у нижнего конца нижней секции 151 штанги, и вертикальным центрирующим конусом 152, установленным на указанной опоре 152а на некотором расстоянии от нижнего конца штанги 15, при этом указанный конус 152 и указанная штанга коаксиальны. Жесткая опора 152а, выполненная по существу по форме буквы «J», выполнена с верхним звеном, посредством которого она прикреплена к нижнему концу нижней секции 151 штанги 15, и вертикальным нижним звеном, ориентированным в сторону верха и в сторону штанги 15, при этом центрирующий конус 152 прикреплен к этому звену. Средства стыковки, содержащиеся в каждом модуле вмешательства, образованы опорой в виде по меньшей мере одного жесткого проходящего вверх рычага и вертикальным центрирующим конусом 20, установленным на верхнем конце опоры. Центрирующий конус 20 предпочтительно расположен по вертикали над центром тяжести указанного модуля вмешательства, при этом по форме он является ответным конусу 152, установленному на штанге 15. В предпочтительном варианте осуществления центрирующий конус 152, установленный на штанге, является охватываемым и прикреплен к своей опоре своим большим основанием. Центрирующий конус 20, установленный на модуле вмешательства, является охватывающим и сформирован в жестком корпусе 20а, установленном на рычаге или рычагах опоры, при этом впадина, образованная данным конусом, ориентирована в нисходящем направлении.
Для соединения с модулем вмешательства, блок 1 отслеживания перемещают вдоль направляющего рельса 4 до тех пор, пока он не достигнет положения над указанным модулем вмешательства, и выдвигают его штангу 15 таким образом, чтобы конус 152 занял более низкое положение, чем конус 20а модуля вмешательства. Далее, путем перемещения блока 1 отслеживания, конус 152 перемещают в ось конуса 20а. И наконец, для реализации функции соединения, штангу 15 втягивают таким образом, чтобы охватываемый конус вошел в зацепление с охватывающим конусом. Данная схема сборки с применением конусов, помимо функции центрирования, также позволяет обеспечить неподвижность модуля вмешательства относительно штанги.
В другом варианте осуществления соединительные средства включают в себя, с одной стороны, поворотный крюк 155, шарнирно соединенный с шасси 10 блока 1 отслеживания и связанный с приводом 156 перемещения, содержащимся в блоке 1 отслеживания, и, с другой стороны, соединительное кольцо 22, содержащееся в модуле 2 и выполненное с возможностью вмещения соединительного крюка 155 путем посадки с геометрическим замыканием.
Привод 156 предпочтительно образован электрическим исполнительным механизмом типа силового цилиндра, например. Как раскрыто выше, данный вариант осуществления подходит, в частности, для модуля вмешательства, конструктивно выполненного с возможностью подвешивания на направляющем рельсе 4. Для этого данный модуль вмешательства оснащен тележкой, оснащенной средствами качения и средствами подвешивания на направляющем рельсе 4.
Направляющий рельс предпочтительно связан с зоной 45 хранения, где размещен модуль вмешательства или каждый из них, когда он бездействует. Как показано на Фиг. 6, зона 45 хранения примыкает к направляющему рельсу 4 (Фиг. 6).
Зона 45 хранения предпочтительно связана с рельсом через точку 46 сопряжения. Как показано на Фиг. 6, зона 45 хранения образована неподвижными секциями рельса 45а, каждая из которых выполнена с возможностью приема модуля вмешательства. Точка 46 сопряжения образована, с одной стороны, секцией рельса, шарнирно соединенной с направляющим рельсом 4, и, с другой стороны, приводом 46а, управляемым блоком 3 обработки.
Секция рельса, образующая точку 46 сопряжения, связана, одним из своих концов, с направляющим рельсом 4, при этом другой ее конец связан с одной из секций рельса 45а зоны 45 хранения. Привод 46а, образующий точку 46 сопряжения, предпочтительно включает в себя электрический силовой цилиндр.
Для присоединения одного из модулей вмешательства, шарнирно-соединенную секцию рельса, образующую точку сопряжения, совмещают с соответствующей секцией блока зоны хранения с помощью привода и соединяют соответствующий модуль с блоком 1 отслеживания путем перемещения поворотного крюка 155.
Блок 1 отслеживания предпочтительно содержит одновременно оба из раскрытых выше двух соединительных средств.
Для взвешивания животных, блок 1 отслеживания предпочтительно содержит датчики 17 деформации, установленные между его шасси 10 и вертикальной штангой 15. Для этой цели, штанга 10 прикреплена верхним концом верхней секции штанги 150 к горизонтальной плите 157, опертой на два датчика 17 деформации, установленных с обеих сторон от штанги 15, при этом датчики 17 деформации оперты на скобу шасси 10 блока 1 отслеживания. В данном варианте осуществления, соединение винта 161 с мотором 160 обеспечивает возможность осевого перемещения винта 161 относительно выходного вала мотора 160. Сигналы, испускаемые датчиками 17 деформации, интерпретирует блок 3 обработки. Данное расположение позволяет взвешивать животных с помощью подходящих модулей 2а, 2b, 2с вмешательства, как раскрыто ниже. Модули данного типа изображены на Фиг. 7-10.
Фиг. 7 изображает модуль 2а взвешивания, образованный жесткой горизонтальной плитой 28а, содержащей в своем центре раскрытые выше соединительные средства 20, 20а, 21. Модуль взвешивания предназначен, главным образом, для взвешивания сельскохозяйственной птицы, однако путем доработки, не выходящей за пределы компетенции специалиста в данной области техники, в частности - доработки плиты, блока 1 отслеживания, направляющего рельса 4 и элементов подвешивания для него, его можно приспособить для взвешивания животных гораздо большего веса, например, крупного рогатого скота, свиней, овец или коз.
Фиг. 8 и 9 изображают второй вариант осуществления модуля взвешивания сельскохозяйственной птицы. Изображенный на данных фигурах модуль 2b вмешательства содержит горизонтальную плиту 28b, установленную на жестких подвесах 280b, содержащих средства 20, 20а, 21 у верхнего конца, как раскрыто выше, для соединения со штангой 15 блока отслеживания.
Фиг. 10 изображает третий вариант осуществления модуля взвешивания. Данный модуль взвешивания 2с выполнен в виде разделенной на отсеки люльки и предназначен для взвешивания мертвых животных и травмированных животных. Люлька содержит жесткую горизонтальную плиту 28с, вертикальные стенки 281с, стоящие прямо на жесткой плите 28с, и жесткие подвесы 280с, прикрепленные к жесткой горизонтальной плите 28с и содержащие раскрытые выше соединительные средства 20, 20а, 21 у верхнего конца. Данный модуль взвешивания 2 с также может служить для удаления этих животных в специально отведенные места.
Плита 28b модуля 2b вмешательства (Фиг. 8 и 9), выполненная с возможностью взвешивания животных, предпочтительно постоянно содержит по меньшей мере один датчик С1 температуры и по меньшей мере один датчик С2 влаги, датчик аммиака и датчик (не показан) для анализа химического состава способом БИК-спектроскопии (спектроскопии в ближней инфракрасной области, англ. NIRS (near-infrared spectroscopy)), прикрепленные на ее нижней стороне; сигналы и данные от них анализирует блок 3 обработки, датчика анализа состава подстилки и датчик анализа состава экскрементов. Путем выдвижения штанги 15 можно привести указанные датчики в контакт или на близкое расстояние от пола, или подстилки, или экскрементов для их измерения; если речь идет о подстилке, то измеряют, в частности, ее температуру, влажность, количество аммиака, выбрасываемого подстилкой; если речь идет об экскрементах, то измеряют их состав.
Согласно дополнительной конфигурации изобретения, модуль взвешивания 2b содержит средства проверки состояния здоровья ног животных, которое активно во время взвешивания, для обнаружения, во время взвешивания, любых травм и инфекций, например, пододерматита. В одном из вариантов реализации плита 28b модуля взвешивания 2b размещена в герметичном параллелепипедальном ящике, при этом средства проверки состояния здоровья ног включают в себя устройство 7 получения изображений, помещенное в указанный герметичный ящик. Герметичный ящик содержит верхнюю горизонтальную стенку, предназначенную для приема подлежащих взвешиванию животных. Данная стенка выполнена из материала, проницаемого для света, например, видимого света. Оптическая ось устройства 7 получения изображений ориентирована в сторону проницаемой для света стенки.
Путем анализа изображений, выданных устройством 7 получения изображений, или сформированных на основе подаваемых им сигналов, блок 3 обработки и подходящие программные средства искусственного интеллекта, которыми он оснащен, могут обнаруживать любые раны ног, копыт и подошвенной зоны, а также любые инфекции, например, пододерматит, абсцессы на грудине и иные изменения.
В первом варианте осуществления (Фиг. 8) устройство 7 получения изображений включает в себя по меньшей мере одну видеокамеру, предпочтительно - широкоугольного типа, стационарно установленную в центральной зоне указанного ящика.
В другом варианте осуществления (Фиг. 9) устройство 7 получения изображений образовано множеством формирователей сигнала изображения. Данные формирователи расположены в ряд и стационарно смонтированы на оборудовании, установленном с возможностью передвижения на горизонтальных параллельных ползунах, установленных в ящике под верхней светопроницаемой стенкой, при этом указанное передвижное оборудование выполнено с возможностью перемещения в ящике под указанной верхней светопроницаемой стенкой посредством привода, образованного, с одной стороны, устройством передачи движения, находящимся в зацеплении с передвижным оборудованием, и, с другой стороны, приводом, закрепленным в ящике с возможностью вхождения в зацепление с устройством передачи движения. В одном из вариантов реализации устройство передачи движения включает в себя по меньшей мере одну бесконечную ленту 7а, предпочтительно - зубчатую, установленную на ведущем шкиве и ведомом шкиве, при этом и тот, и другой установлены с возможностью вращения вокруг неподвижных осей ящика, при этом ведущий шкив соединен с приводом. Приведение в действие и управление данным приводом предпочтительно осуществляет блок 3 обработки.
В другом варианте осуществления, для анализа состояния ног животных, устройство получения изображений включает в себя по меньшей мере один ультразвуковой зонд.
Для очистки верхней светопроницаемой стенки (Фиг. 8 и 9), ящик оснащен средством очистки, например, включающим в себя скребковое средство 70, выполненным с возможностью движения по указанной верхней светопроницаемой стенке ящика и опирания на данную верхнюю стенку. Скребковое средство 70 приводят в движение вдоль верхней светопроницаемой стенки ящика посредством привода, содержащего, например, две боковые бесконечные ленты 70а, натянутые между ведомым и ведущим шкивами, при этом ведущие шкивы предпочтительно установлены на общей оси, установленной на подшипниках, прикрепленных к ящику, при этом указанная ось соединена с приводом. Ведомые шкивы установлены с возможностью вращения вокруг осей, прикрепленных к ящику.
Скребковое средство предпочтительно связано с множеством сопел (не показаны), выполненных с возможностью распыления очищающей жидкости. Сопла ориентированы с возможностью распыления очищающей жидкости на верхнюю светопроницаемую стенку ящика.
На Фиг. 1 и 4 изображен модуль 2d распределения или раздачи материалов, соединенный с блоком 1 отслеживания. Распределительный модуль 2d либо содержится в блоке 1 отслеживания и соединен со штангой 15 (Фиг. 1), либо блок 1 отслеживания буксирует его, и в этом случае он подвешен на направляющем рельсе 4 посредством роликов и соединен с шасси указанного блока 1 отслеживания (Фиг. 4).
Согласно двум вариантам его осуществления, распределительный модуль 2d содержит распределительную насадку 23, установленную по горизонтали или под наклоном к горизонтали на жесткой подающей трубе 24, образованной двумя трубными участками: верхним по потоку 240 и нижним по потоку 241, соединенными друг с другом посредством шарнирного соединения 242, при этом указанная насадка 23 соединена с жестким нижним по потоку трубным участком посредством упруго деформируемой муфты 230. Первый привод 231 установлен между насадкой 23 и нижним по потоку участком 241 трубы путем кинематического соединения с ними, а второй привод 243 соединен соответственно с двумя трубными участками 240, 241 на обеих сторонах шарнирного соединения 242.
Нижний по потоку трубный участок 241 образует колено, предпочтительно под прямым углом, и соединен по вертикали с шарнирным соединением 242. Данное шарнирное соединение образовано двумя частями, одна из которых вставлена в другую с возможностью поворачивания относительно друг друга вокруг вертикальной оси.
Верхний по потоку трубный участок 240 содержит вертикальный опорный элемент, который может представлять собой стойку, оснащенную в своей верхней части средством 20, 20а, 21 соединения со штангой 15, как раскрыто выше.
Если модуль подвешен на направляющем рельсе 4, указанный опорный элемент включает в себя вертикальную телескопическую штангу и тележку, подвешенную на направляющем рельсе 4 посредством роликов. Телескопическая штанга образована верхней секцией штанги и нижней секцией штанги и прикреплена верхней частью верхней секции к подвесной тележке. Секции штанги установлены с возможностью скольжения одна внутри другой, при этом их вращение относительно друг друга блокировано. Как раскрыто выше, телескопическую штангу приводят в действие с возможностью втягивания или выдвижения посредством приводного механизма. Приводной механизм включает в себя мотор, предпочтительно - внутри тележки модуля, и винт, установленный в указанных двух секциях штанги и проходящий в осевом направлении внутри них, при этом указанный винт прикреплен своей верхней частью к выходному валу мотора с возможностью приведения его во вращение посредством мотора и гайки, в зацепление с которой винт 161 введен путем ввинчивания, при этом указанная гайка прикреплена к верхнему концу нижней секции штанги.
Нижняя секция штанги прикреплена своим нижним концом к верхнему по потоку трубному участку 240. Следует понимать, что насадка и две трубные секции оперты на стойку или на телескопическую штангу, в зависимости от конкретного случая.
Верхний по потоку трубный участок 240 соединен с гибкой воздушной трубой подачи материалов, при этом данная труба предназначена для соединения с удаленным специально выделенным источником подачи материалов, установленным за пределами животноводческого помещения, при этом указанные материалы могут представлять собой подстилочные материалы или кормовые материалы. Транспорт материалов из специально выделенного источника в распределительную насадку 23 осуществляют пневматически, т.е. данные материалы транспортируют к месту использования потоком воздуха-носителя. Преимущество данной методики состоит в возможности транспорта материалов на относительно большие расстояния - порядка нескольких сотен метров. Ее преимущество также состоит в отсутствии необходимости применения рельса для транспорта резервуара материалов с использованием модуля вмешательства, так как материалы сами по себе являются тяжелыми; резервуар остается снаружи на стационарной станции. Поэтому отсутствует необходимость усиления элементов для опирания направляющего рельса 4 и самого направляющего рельса. Гибкая подающая труба предпочтительно оперта либо на специально предназначенный для этого рельс, либо на направляющий рельс 4.
Блок 3 обработки приводит в действие указанные два привода 231 и 243 и управляет ими. Привод 231 предназначен для регулирования наклона насадки к горизонтали, т.е. ее угла возвышения, и опционально для качательного перемещения насадки в вертикальной плоскости. Привод 243 предназначен для регулирования азимута насадки, т.е. ее углового положения в горизонтальной плоскости, и опционально для приведения насадки в поворотное или качательное движение в горизонтальной плоскости и управления им. Кроме того, телескопическая штанга и ее приводной механизм, с которым связан распределительный модуль, могут служить для регулирования высоты насадки относительно пола.
Привод 231 предпочтительно включает в себя электрический силовой цилиндр, корпус которого прикреплен к нижнему по потоку трубному участку 241, а его шток прикреплен к насадке 23. Степень выдвижения или втягивания силового цилиндра измеряют, например, потенциометром или любым подходящим известным средством.
Электрический привод 243 расположен на раме, прикрепленной к верхнему по потоку трубному участку 240, и содержит поворотный выходной вал, соединенный с устройством передачи движения, образованным, например, зубчатой ведущей шестерней, соединенной с его выходным валом, и зубчатым колесом, соединенным с нижним по потоку трубным участком и находящимся в зацеплении с зубчатой ведущей шестерней. Угловое положение насадки 23 в горизонтальной плоскости отслеживает угловой датчик, сигналы от которого анализирует блок 3 обработки. Угловой датчик соединен либо с выходным валом привода 243, либо с одним из элементов устройства передачи движения.
Распределительный и раздаточный модуль 2d может служить не только для операций формирования подстилки в животноводческом помещении, но и для локального распределения указанных материалов по влажным и загрязненным зонам, идентифицированным как таковые блоком 3 обработки и подходящими программными средствами искусственного интеллекта по изображениям, выданным камерой или камерами, которыми оснащен блок 1 отслеживания. Следует отметить, что загрязненные зоны идентифицируют по изображениям, выданным камерой, работающей в видимой области спектра, а влажные зоны, которые обычно холоднее, идентифицируют по изображениям, выданным тепловизионной камерой. Для более точного покрытия влажных зон, распределительная насадка содержит тепловизионную камеру 244, ориентированную так, что ее оптическая ось параллельна продольной геометрической оси насадки. Сигналы, испускаемые данной тепловизионной камерой, обрабатывают блок 3 обработки и подходящие программные средства искусственного интеллекта.
Указанные различные конфигурации обеспечивают возможность разбрасывания и распределения подстилочных материалов в присутствии животных, но без попадания разбрасываемых материалов на животных.
Насадка 23 вмещает, на уровне своего выпускного отверстия, шарнирно-соединенный направитель 255, наклон которого в сторону выпускного отверстия можно регулировать посредством привода 256, включающего в себя, например, электрический силовой цилиндр, приводимый в действие и управляемый блоком 3 обработки. Указанный направитель предназначен, главным образом, для ориентирования насадки за счет того, что он выходит из нее преимущественно в нисходящем направлении.
В предпочтительном варианте выше по потоку от насадки 23 на гибкой подающей материал трубе расположены инфракрасные детекторы, выполненные с возможностью обнаружения горящих предметов или высокотемпературных предметов, транспортируемых в указанной трубе. В случае обнаружения таких предметов, направитель 255 перемещают в направлении блокирования горловины насадки для предотвращения попадания этих предметов на подстилку. Также выше по потоку от насадки, гибкая труба может содержать акустический детектор с возможностью обнаружения звуков, возникающих из-за прохождения посторонних предметов. В случае их обнаружения, направитель 255 перемещают в нисходящем направлении для отправки этих предметов в приемник, установленный на насадке под ее выпускным отверстием.
В ходе распределения некоторых материалов возможно образование пыли, поэтому предпочтительно удалять пыль из этих материалов перед их распределением или раздачей. Поэтому между гибкой подающей трубой распределительного и раздаточного модуля 2d и верхним по потоку трубным участком 240 (Фиг. 11) установлено средство пылеудаления, включающее в себя, например, циклонный уловитель 257, связанный с мешком 257а, для извлечения пыли.
Раскрываемый распределительный и раздаточный модуль 2d может служить для распределения не только подстилочных материалов в животноводческом помещении, но и материалов любого другого типа, например, кормовых материалов. Эти кормовые материалы могут представлять собой твердые зернистые материалы, например, кукурузу, жидкие материалы, например, молоко, питьевую воду и суп, пастообразные материалы, например, кормовые композиции на водной основе и злаковую муку, или порошкообразные материалы, например, злаковую муку. Они могут представлять собой грубые кормовые материалы в виде сена, гранул и т.п. Сухие материалы можно раздавать в кормушки, например, шнековые кормораздатчики или, на практике, помещать на пол или на подстилку, чтобы обогатить ее и развлечь животных для улучшения условий их жизни и уменьшения агрессии к своим собратьям.
Фиг. 18 изображает распределительный и раздаточный модуль 2d', схожий с модулем 2d, за исключением того, что качательная насадка 23 ориентирована в сторону пола и находится в вертикальном положении, когда она бездействует. В данной конфигурации происходит качание насадки в вертикальной плоскости. Такое отличное пространственное расположение распределительного модуля 2d предназначено, главным образом, для наполнения кормушек. Следует отметить, что распределительный модуль 2d' на данной фигуре расположен с возможностью регулирования по высоте посредством штанги, прикрепленной к тележке с роликами для подвешивания на направляющем рельсе 4.
Агрегат отслеживания предпочтительно оснащен дополнительным модулем 2е, в частности - для распределения, раздачи и удаления, содержащим тележку для подвешивания на направляющем рельсе 4, к которой прикреплен, посредством жесткой трубы 27, верхний конец телескопического ствола 26, предназначенный для соединения с гибким рукавом подачи материала. Телескопический ствол 26 образован ближней трубной секцией, дальней трубной секцией и опционально одной или несколькими промежуточными секциями.
Гибкий рукав соединен с удаленным специально выделенным источником, установленным за пределами животноводческого помещения, при этом указанный специально выделенный источник оснащен резервуаром предназначенных для подачи материалов.
Жесткая труба 27 соединена, с одной стороны, с гибким рукавом и, с другой стороны, со стволом 26, а именно - с ближней секцией, посредством гибкой муфты 260. Данная труба образована двумя трубными участками: верхним по потоку 270 и нижним по потоку 271, соединенными друг с другом шарнирным соединением 272. Верхний по потоку трубный участок 270 прикреплен к тележке модуля 2е и соединен с рукавом подачи материала, а гибкая муфта 260 соединена с нижним по потоку трубным участком 271.
Телескопический ствол 26 оснащен приводом для втягивания и выдвижения. Данный ствол можно ориентировать по азимуту и углу возвышения посредством привода 261, 262, управляемого блоком 3 обработки.
За счет этого зона досягаемости стола 26 из одного и того же положения дополнительного модуля 2е может включать в себя разные точки здания. Ствол 26 образован, например, ближней секцией ствола и дальней секция ствола, установленными с возможностью скольжения одна в другой с промежуточными шарнирными соединениями.
Привод 261 предназначен для регулирования наклона ствола 26 к горизонтали и опционально для приведения ствола в угловое качательное движение с регулируемой амплитудой, а привод 262 предназначен для регулирования азимута ствола, т.е. его углового положения в горизонтальной плоскости, и опционально для приведения ствола в поворотное или качательное движение в горизонтальной плоскости. Привод 261 предпочтительно механически соединен со стволом 26 и с жестким нижним по потоку трубным участком 271 и предпочтительно образован электрическим силовым цилиндром. Привод 262 расположен на верхнем по потоку трубном участке или на тележке и кинематически соединен с нижним по потоку трубным участком устройством передачи движения, образованным зубчатой ведущей шестерней, прикрепленной к выходному валу привода 262 и зубчатым колесом, находящимся в зацеплении с зубчатой ведущей шестерней и соединенным с нижним по потоку трубным участком 271.
Угловое положение ствола 26 в горизонтальной плоскости отслеживает угловой датчик, сигналы от которого интерпретирует блок 3 обработки. Угловой датчик соединен либо с выходным валом привода 262, либо с одним из элементов устройства передачи движения. Угловое положение ствола 26 также можно отслеживать по временным задержкам.
В качестве альтернативы, угловые положения ствола 26 отслеживают с помощью камеры.
Дальний конец ствола 26 содержит отсечной клапан 263, выполненный с возможностью перемещения посредством привода 264, установленного на дальней секции, и приведения в действие блоком 3 обработки. Кроме того, механическое средство втягивания, управляемое блоком 3 обработки, прикреплено к дальней и ближней секциям ствола с возможностью принудительного втягивания ствола, когда он включен в работу, или ограничения его выдвижения.
Для выдвижения ствола 26, клапан 263 закрывают и вводят в ствол 26 текучую среду под давлением, при этом степенью выдвижения ствола управляет блок 3 обработки путем воздействия на механическое средство втягивания. Далее указанный клапан можно открыть, путем воздействия на него соответствующего привода, для подачи материала.
Механическое средство втягивания предпочтительно образовано тяговым канатом 265, прикрепленным свободным концом к дальней секции ствола, и наматывателем каната 266, прикрепленным к ближней секции, при этом указанный наматыватель каната 266 содержит намоточный барабан, на который наматывают канат, привод, соединенный с намоточным барабаном, и кодовый датчик положения, соединенный с барабаном или с мотором, при этом кодовый датчик положения может быть импульсного или аналогового типа. Кодовый датчик положения выполнен с возможностью выдачи информации в форме сигналов степени разматывания или наматывания каната и, соответственно, степени выдвижения или втягивания ствола 26.
Зная положение модуля 2е вдоль его опорного рельса, а также угловое положение ствола 26 и по азимуту, и по углу возвышения и его степень выдвижения или втягивания, можно точно определять положение дальнего конца ствола в помещении. И наоборот, зная географическое положение, которое должно быть достигнуто указанным концом ствола 26, можно установить тележку модуля 2е в наилучшее положение и соответствующим образом расположить ствол и по азимуту, и по углу возвышения, и по степени выдвижения.
Раскрытый модуль 2е со стволом 26 может служить для выполнения разнообразных задач. Он может служить в качестве подпиточного средства при пожаротушении, и для этой цели ствол 26 соединен гибкой трубой со специально выделенным источником за пределами помещения, оснащенным резервуаром огнетушащего вещества.
Огнетушащее вещество может включать в себя воду, пену или дисперсное негорючее вещество, транспортируемое текучей средой под давлением. Дисперсное вещество может включать в себя песок или порошок подходящего вещества, а текучая среда под давлением может представлять собой воздух или по существу негорючий газ. Текучая среда под давлением также может включать в себя негорючую жидкость, например, воду.
Для помощи в пожаротушении, ствол может быть оснащен тепловизионной камерой, сигналы которой передают в блок 3 обработки.
Модуль 2е, а именно - его ствол 26, может служить для распределения кормовых материалов, например, злаков, пастообразного корма, супов и т.п. В этом случае, гибкий подающий рукав ствола 26 соединен со специально выделенным источником, установленным за пределами помещения, для подачи кормовых материалов.
Модуль 2е, а именно - его ствол 26, также может служить вспомогательным или основным средством подачи подстилочных материалов.
Он также может служить средством, оказывающим противодействие животному или вынуждающим его выполнить нежелаемое действие. Если речь идет о курице-несушке, с помощью модуля 2е можно препятствовать откладке яиц за пределами гнезд. Для этой цели, посредством ствола можно направлять струю сжатого воздуха на тело курицы-несушки.
Модуль 2е, а именно - его ствол 26, также может служить для извлечения проб атмосферы помещения. Для этой цели, ствол 26 соединяют с управляемым блоком 3 обработки обводным клапаном 267, один канал которого соединен со специально выделенным источником материала, а другой канал соединен с вакуумным насосом 268, связанным с газоанализатором 269. Воздействуя на обводной клапан, внутренний объем ствола соединяют с вакуумным насосом 268, открывают отсечный клапан 263 и приводят в действие насос для всасывания пробы атмосферы из помещения в ствол с последующей подачей в анализатор 269 и анализом. Анализатор предпочтительно установлен на стационарной станции в данном помещении или в соседнем помещении.
Свободный конец ствола 26 модуля 2е может быть оснащен разнообразными датчиками, выполненными с возможностью выдачи информации о физических, и/или химических, и/или биологических параметрах помещения и его атмосферы, и датчиками, выполненными с возможностью выдачи информации о физиологических параметрах животных.
В качестве неограничивающего примера, группа датчиков, выполненных с возможностью выдачи информации о физических и/или химических параметрах помещения и его атмосферы, может содержать по меньшей мере один датчик определения температуры атмосферы помещения, по меньшей мере один датчик определения влагосодержания атмосферы помещения, по меньшей мере один датчик определения содержания углекислого газа в атмосфере помещения, по меньшей мере один датчик определения освещенности в помещении, по меньшей мере один датчик определения скорости воздушного потока в помещении. Кроме того, ствол 26 может быть оснащен, в качестве неограничивающего примера, по меньшей мере одним датчиком определения температуры подстилки и по меньшей мере одним датчиком определения влагосодержания подстилки с возможностью получения указанных данных путем непосредственного контакта или дистанционно, в зависимости от типа датчиков.
Указанные данные получают в разных точках помещения и подстилки. Собранные данные и географические координаты этих точек регистрируют. Это позволяет соотнести значения для параметров или измеренные значения с каждой географической точкой помещения. Это обеспечивает возможность создания одной или нескольких пространственных карт здания, каждая из которых представляет в подходящей форме различные значения для измеряемой величины. Например, температура помещения может быть визуально представлена разными цветами по шкале от синего до красного, при этом синим цветом представлены самые низкие температуры, а красным цветом - самые высокие. Потоки воздуха могут быть представлены в форме векторов, каждый из которых иллюстрирует направление, знак направления и интенсивность указанного потока для соответствующей точки. Разнообразные формы представления обеспечивают возможность выделения разнообразных несоответствий и аномалий, подлежащих устранению.
Следует отметить, что малый вес блока 1 отслеживания и дополнительного модуля 2е, в частности - его ствола 26, обеспечивает возможность быстрых перемещений в помещении, а также быстрого выполнения измерений, благодаря чему изменение измеряемого в помещении значения, если такое изменение происходит медленно, не окажет значительного влияния на результаты измерений.
Группа датчиков, выполненных с возможностью выдачи информации об идентификационных данных и физиологических параметрах животных, может опционально содержать по меньшей мере один датчик температуры тела, определение которой может происходить путем непосредственного контакта или дистанционно. Если речь идет об утке, температура клюва является показателем откорма.
В качестве неограничивающего примера, группа датчиков также может опционально содержать по меньшей мере один датчик, выполненный с возможностью определения идентификационных данных животного, опционально по меньшей мере один датчик, выполненный с возможностью определения сердцебиения животного, и опционально по меньшей мере один датчик, выполненный с возможностью определения наличия у животного одышки или дыхания животного. Это позволяет соотнести разнообразные параметры состояния здоровья с каждым животным. Благодаря этому, можно быстро обнаруживать больных животных и максимально быстро изолировать их от остальных животных для лечения. Это также позволяет быстро обнаруживать мертвых животных и животных с патологией и создавать карты здания, изображающие положения больных животных, мертвых животных и животных с патологией. Аналогичным образом, можно составлять карты расхождений по весу.
С помощью ствола 26 также можно оказывать помощь больным животным на месте. Для этой цели, ствол 26 модуля 2е соединяют с резервуаром лечебного вещества. Ствол 26 также может быть оснащен устройством, выполненным с возможностью оказания такой помощи. Одно из таких устройств включает в себя изолирующий купол, предназначенный для укрытия больного животного, при этом купол связан со стволом с возможностью поступления из него, например, воздуха, обогащенного кислородом и/или иным лечебным веществом.
Модуль 2е также может служить для дезинфекции животноводческого помещения и для этой цели соединен с резервуаром дезинфицирующего средства.
Модуль 2е со стволом 26 может служить для эффективной борьбы с кусанием хвоста у свиней и расклевом у сельскохозяйственной птицы. Для этого достаточно использовать ствол для отделения агрессоров от их жертв. Атаки можно обнаруживать посредством камер и идентифицировать как таковые с помощью программных средств искусственного интеллекта блока 1 отслеживания.
В качестве меры профилактики указанных проблем, выдвижение ствола можно использовать для того, чтобы отвлечь животных путем добавки различных материалов, например, корма, злаков, неизмельченной соломы, гастролитов, чтобы побудить животные к рытью когтями или копанию для поиска корма.
Модуль 2е со стволом 26 может служить в качестве средства очистки, и для этой цели свободный конец ствола 26 оснащен соплом и/или чистящей щеткой. В сопло можно подавать воду по стволу. В этом случае ствол может быть связан с трубопроводом с возможностью всасывания отходов и чистящих средств. Трубопровод и ствол могут быть коаксиальны и быть установлены один внутри другого. Зазор между трубопроводом и стволом соединен с аспиратором для удаления отходов и отработанных моющих текучих сред.
Модуль 2е со стволом 26 может служить в качестве средства опорожнения кормушек путем отсасывания. В этом случае, ствол соединяют с аспиратором либо напрямую, либо через промежуточный обводной клапан.
Наличие остатков корма в кормушках можно выявлять путем анализа, с помощью подходящих программных средств искусственного интеллекта, изображений, выданных камерой или камерами, которые содержит блок 1 отслеживания. После отсасывания, остатки корма можно взвесить. Вес остатков корма также можно определять путем анализа, с помощью подходящих программных средства искусственного интеллекта, изображений, выданных 3D камерой или каждой из них. Если кормушка принадлежит единственному животному, вес остатков может быть показателем состояния здоровья животного, поскольку известно, что больное животное склонно есть меньше.
Ствол 26 может служить для приведения в действие рычагов кормовой решетки.
Фиг. 14 изображает модуль 2d распределения и раздачи, прикрепленный к телескопической штанге, в свою очередь прикрепленной к тележке, подвешенной на направляющем рельсе 4, как раскрыто выше. Распределительный модуль соединен с блоком 1 отслеживания. На данной фигуре показано, что модуль 2h, образованный люлькой перемещения персонала, соединен с подвесной тележкой. Люлька подвешена на направляющем рельсе 4 посредством роликов. Средством втягивания или выдвижения опоры штанга распределительного модуля 2d может управлять лицо, перемещаемое люлькой, для чего она может быть оснащена пультом управления. Подачу электроэнергии данному модулю может осуществлять блок 1 отслеживания или, на практике, встроенные батареи.
Фиг. 15 изображает подвесной модуль 2f с возможностью применения для массажа и/или расчесывания животных, например, крупного рогатого скота. Данный модуль образован тележкой, оснащенной средствами качения в зацеплении с рельсом 4 и выдвижной, например, телескопической, штангой, оснащенной средствами выдвижения и втягивания, образованными, как раскрыто выше, приводом, установленным на тележке, и винтовой парой, приводимой в действие данным приводом. Модуль 2f содержит, у конца штанги, ориентируемую раму, содержащую поворотную щетку, приводимую во вращение посредством привода, который содержит ориентируемая рама. Раму можно ориентировать путем установки в наклонное положение в диапазоне от горизонтального до вертикального.
Фиг. 19 изображает модуль 2g перемещения и манипулирования, образованный роботизированной рукой, работающей в полярной системе координат, установленной на тележке с роликами для подвешивания на направляющем рельсе 4. Модуль данного типа выполнен с возможностью вмещения нескольких инструментов. Он также может быть оснащен рукавом для раздачи материалов, например, в частности, раздаваемых подстилочных материалов, или кормовых материалов, например, тех, речь о которых шла выше. Данная рука также может служить для очистки блока 1 отслеживания, датчиков и камеры, которые содержит данный блок, а также для любой другой операции техобслуживания, например, очистки направляющего рельса 4, помещения и т.п. Он может содержать моечный ствол, чистящее средство в который поступает по рукаву, или любое другое подходящее оборудование. Он также может содержать ствол пожаротушения.
На данной фигуре показано, что модуль перемещения оснащен ориентирующей револьверной головкой, установленной на тележке, с которой шарнирно соединена роботизированная рука, образованная несколькими секциями руки, шарнирно соединенными друг с другом и снабженными приводом.
Фиг. 20 изображает телескопическую штангу 9, выполненную с возможностью вмещения различных съемных инструментов. Штанга 9 образована двумя цилиндрическими трубками, установленными одна в другой с возможностью скольжения, связанными с приводом выдвижения и втягивания, включающим в себя, например, силовой цилиндр 90. Корпус силового цилиндра 90 прикреплен к одной из указанных двух трубок, а его шток прикреплен к другой из них.
На данной фигуре показано, что нижний конец штанги 9 оснащен съемным захватом 91 для сбора мертвых животных и предметов. Захват 91 образован множеством клешней 910, шарнирно соединенных с плитой, установленной на центральной стойке 911, открываемых и закрываемых посредством приводного механизма, образованного соединительными тягами, каждая из которых шарнирно соединена, с одной стороны, с втулкой, установленной на центральной стойке с возможностью скольжения, и, с другой стороны, с одной из клешней, при этом втулка выполнена с возможностью приведения в движение вдоль центральной стойки силовым цилиндром. Верхний конец центральной стойки 911 шарнирно соединен с цилиндрической муфтой 912, съемно прикрепленной к нижнему концу штанги 9 путем посадки с геометрическим замыканием.
Фиг. 21 изображает инструмент 92, предназначенный для сбора яиц, при этом данный инструмент выполнен с возможностью посадки на штангу вместо захвата 91. Как показано на данной фигуре, инструмент 92 образован двумя губками 920, шарнирно соединенными с одной и той же осью, установленной на скобе 921, с возможностью открытия и закрытия посредством силового цилиндра. Две губки выполнены с зубцами, проходящими одни между другими в закрытом положении. Скоба 921 сформирована у конца муфты 922 для прикрепления ее, с возможностью снятия, к нижнему концу штанги 9 путем посадки с геометрическим замыканием.
Фиг.22 изображает камеру 93 с опорой, установленной на ориентируемой раме 930, оснащенной муфтой 931 для ее прикрепления, с возможностью снятия, к нижнему концу штанги путем посадки с геометрическим замыканием. Ориентируемая рама 930 образована скобой, содержащей, между двумя своими боковыми участками, две выровненные по оси шейки, с которыми шарнирно соединена опора для камеры 93. Кроме того, скоба для рамы 930 своим основным (базисным) участком шарнирно соединена с соединительной муфтой 931 вдоль ее геометрической оси вращения. Камера 93 может служить для проверки глаз животных. Полученные изображения могут анализировать программные средства искусственного интеллекта, подходящие для определения состояния здоровья животных.
Фиг. 23 изображает датчики, установленные на общей опоре 94, прикрепленной к ориентируемой раме 940, оснащенной муфтой 941 для прикрепления к нижнему концу штанги 9 путем посадки с геометрическим замыканием.
Как и на предыдущей фигуре, ориентируемая рама 941 образована скобой, содержащей две выровненные по оси шейки между своими двумя боковыми участками, с которыми шарнирно соединена общая опора 94 датчиков. Основной участок скобы также шарнирно соединен с крепежной муфтой вдоль геометрической оси ее вращения.
Опора 94 содержит датчик 942 температуры, проходящий в нисходящем направлении и предназначенный, в частности, для получения данных о температуре подстилки. Опора 94 также оснащена двумя другими датчиками, а именно - датчиком влаги и датчиком температуры окружающей среды.
Фиг. 24 изображает устройство перемещения рельсов лотков и иных устройств. Устройство образовано кожухом 950, в котором расположены тяговый мотор 951 и перемещающий палец 952 квадратного поперечного сечения, установленный с возможностью вращения в подшипнике, сформированном в кожухе 950, при этом перемещающий палец частично расположен за пределами кожуха с возможностью разъемного соединения с охватывающим элементом перемещения рельса. Кожух оснащен муфтой 953 для прикрепления, с возможностью снятия, к нижнему концу штанги 9 путем посадки с геометрическим замыканием.
Фиг. 25 изображает ветеринарный прибор 98 для анатомического исследования, содержащий неинвазивные диагностические устройства 985, использующие сигналы, на основе которых можно сформировать одно или несколько изображений внутреннего пространства тела животного с последующим анализом программными средствами искусственного интеллекта, выполненными с возможностью анализа заболеваний. Прибор содержит горизонтальный снабженный приводом прижимной ролик 980, установленный с возможностью вращения между вертикальными боковыми участками U-образной рамы 981, горизонтальный основной участок которой оснащен в своем центре вертикальным валом 982, проходящим наружу от первой рамы 981, при этом вторая рама 983 прикреплена к валу своим основным участком, при этом вертикальные боковые участки второй рамы 983 расположены по обе стороны от первой рамы 981, при этом каждый из указанных боковых участков содержит неинвазивное диагностическое устройство 985. Ролик 980 оснащен двумя осевыми шейками, которыми он сцеплен с возможностью вращения с двумя подшипниками, установленными на боковых участках первой рамы 981. Одна из двух шеек соединена с приводом 984, например, с редукторным электродвигателем. Для анатомического исследования, ролик 980 располагают на спине животного и, путем приведения ролика во вращение, приводят прибор в движение вдоль тела животного. В предпочтительном варианте вторая рама 983 установлена с возможностью вращения на вертикальном валу 982 и выполнена с возможностью приведения во вращение устройством передачи движения, находящимся в зацеплении с приводом 986, прикрепленным к валу 982. Устройство передачи движения предпочтительно образовано зубчатым колесом, прикрепленным к основному участку второй рамы 983, и зубчатой ведущей шестерней, находящейся в зацеплении с зубчатым колесом и прикрепленной к выходному валу привода 986, включающего в себя редукторный двигатель.
Указанные конфигурации обеспечивают возможность приведения диагностических устройств в движение вокруг животного.
Муфта 987 для съемного соединения с нижним концом штанги 9 путем посадки с геометрическим замыканием шарнирно соединена с вертикальным валом 982.
Каждое из неинвазивных диагностических устройств может включать в себя ультразвуковой зонд, стетоскопический щуп, температурный зонд, датчик сердцебиения и любое другое известное диагностическое устройство.
Телескопическая штанга 9 предпочтительно оснащена хвостовиком 901 для прикрепления к узлу 96 перемещения, установленному на приводном устройстве 97, подвешенном на направляющем рельсе 4 посредством роликов и оснащенном приводным колесом, прижатым к внутренней стороне направляющего рельса 4, при этом приводное колесо соединено с мотором приводного устройства 97. Как показано на Фиг. 26, крепежный хвостовик 901 соединен с полым валом, соединенным через блок шестерен с приводом, установленным на узле 96 перемещения. На данной фигуре также показано, что приводное устройство 97 оснащено вертикальной телескопической стойкой 970, содержащей опертое на пол колесо 971 у своего нижнего конца. Телескопическую стойку приводит в выдвинутое положение упругое средство 972, например, пневматическая пружина, под воздействием которого происходит плотное прижатие колеса 971 к полу. Такая компоновка противодействует вращению агрегата, когда штанга 9 находится в боковом консольном положении.
Блок 1 отслеживания может быть прикреплен к приводному устройству 97.
Агрегат отслеживания предпочтительно оснащен одним или несколькими самодвижущимися дистанционно-управляемыми модулями 6а, 6b, 6с, дистанционно управляемыми, предпочтительно - по беспроводной связи, блоком 3 обработки на основе информации, выдаваемой, в частности, камерой или каждой из камер, содержащихся в блоке 1 отслеживания. Дистанционно-управляемый модуль 6а, 6b, 6с или каждый из них выполнен с возможностью перемещения по полу животноводческого помещения и содержит шасси, установленное на опертые на пол колеса и/или гусеницы. По меньшей мере одно из этих колес или гусениц является направляющим и ведущим, при этом кинематический ведущий механизм оснащен электрическим мотором, питаемым от электрических батарей и дистанционно управляемым по беспроводной связи блоком 3 обработки. Ведущее колесо или по меньшей мере одно из других колес может быть соединено с электрическим мотором, питаемым от батарей и также управляемым по беспроводной связи блоком 3 обработки.
Один - 6а - из дистанционно-управляемых модулей (Фиг. 16) предпочтительно оснащен захватными клешнями 60 для сбора мертвых или травмированных животных. Захватные клешни приводит в действие электрический мотор, питаемый от батареи и дистанционно управляемый по беспроводной связи блоком 3 обработки. Дистанционно-управляемый модуль 6а предназначен для сбора сельскохозяйственной птицы. После того, как будет подобрана мертвая или травмированная птица, данный модуль 6а направляют к модулю взвешивания 2d для взвешивания и транспортировки в специально отведенную зону.
Фиг. 17 изображает другой дистанционно-управляемый модуль 6b. Данный модуль 6b предназначен для сбора яиц. В одном из вариантов реализации данный модуль 6b содержит два подборных рычага 61, образующих V-образную конструкцию в передней зоне, и площадку 62 для приема яиц, образованную между рычагами.
Согласно другому признаку изобретения, передняя часть каждого рычага образована горизонтальным роликом.
Фиг. 27 изображает модуль 6 с в другом варианте осуществления. Данный модуль 6с содержит горизонтальную верхнюю плиту 63 округлого очертания и сужающейся формы, прочно прикрепленную к штоку винтового силового цилиндра, который является вертикальным, при этом его корпус находится в зацеплении с возможностью вращения в подшипнике, прикрепленном к шасси указанного модуля, при этом указанный силовой цилиндр соединен через устройство передачи движения с приводом 631 для приведения во вращение, который расположен на шасси. Данный модуль 6с оснащен видеокамерой и множеством датчиков, в частности - температурным зондом.
Раскрываемый модуль выполнен с возможностью вмещения разнообразных принадлежностей и инструментов, при этом последние оснащены горизонтальной стенкой, выполненной с установочным углублением, по форме ответным плите 63 модуля 6с для вмещения указанной плиты, при этом указанное углубление обращено вниз. Горизонтальная стенка также содержит ножки для опирания на пол. Для транспортировки подлежащей использованию принадлежности или инструмента, плиту модуля 6с опускают и вводят данный модуль в зацепление под горизонтальной стенкой указанной принадлежности или инструмента. Далее плиту поднимают, чтобы, с одной стороны, ввести в углубление и, с другой стороны, поднять указанный инструмент или принадлежность.
Фиг. 28 изображает модуль 6с, содержащий клеть 64 для сбора больных животных. Можно видеть, что клеть 64 содержит нижнюю горизонтальную стенку, выполненную с установочным углублением, шарнирную переднюю стенку 640 с возможностью откидывания в сторону пола для облегчения погрузки животного. Передняя стенка оснащена пандусом для облегчения ввода животного. Стенку 640 перемещают из закрытого положения в открытое положение и наоборот посредством привода 641, включающего в себя электрический силовой цилиндр, например.
Клеть оснащена ножками 642, опертыми на пол.
Фиг. 28а изображает клеть 64а для сбора мертвых животных, установленную на раскрытом выше модуле 6с. Данная клеть отлична от клети 64 формой передней стенки 640а, которая выполнена в виде сборного ковша. Клеть содержит горизонтальную нижнюю стенку, выполненную с установочным углублением и ножками 642а, и привод 641а для перемещения передней стенки 640а, при этом данный привод включает в себя электрический силовой цилиндр.
Фиг. 29 изображает раздатчик 65 подстилки для установки на раскрытом выше модуле 6с. Данный раздатчик подстилки содержит горизонтальную нижнюю стенку 650, опертую на ножки, выполненную с установочным углублением, бункер 651, выполненный по форме конуса с возможностью вмещения подлежащей раздаче подстилки, при этом бункер 651 оперт на несущие ножки над нижней стенкой 650 и на некотором расстоянии от нее. Мотор 652 для приведения ротора 653 лопастного разбрасывателя во вращение стационарно установлен в бункере; он работает между днищем бункера и горизонтальной нижней стенкой 650.
Фиг. 30 изображает разрыхляющее устройство 66, предназначенное для аэрации подстилки. Устройство 66 содержит горизонтальную стенку 660, опертую на ножки, выполненную с установочным углублением, и по меньшей мере один разрыхляющий ролик 661, установленный на двух кронштейнах 662, шарнирно соединенных со стенкой 660, при этом разрыхляющий ролик приводят во вращение посредством привода 663. Для ограничения разворота разрыхляющего ролика 661 в нисходящем направлении, каждый кронштейн 662 оснащен подпоркой, образующей упор, предназначенный для опирания на соответствующую ножку.
Фиг. 31 изображает пробоотборное устройство 67, установленное на раскрытом выше модуле 6с.
Пробоотборное устройство содержит горизонтальную стенку 670, установленную на ножках и выполненную с установочным углублением, роботизированную руку, прикрепленную к горизонтальной стенке 670, и пробоотборник 672, установленный на роботизированной руке. Роботизированная рука содержит револьверную головку и несколько сегментов руки, снабженных приводом и шарнирно соединенных друг с другом. Ближний сегмент руки установлен на револьверной головке. Дальний сегмент руки содержит пробоотборник 672 у своего свободного конца.
Пробоотборное устройство выполнено с возможностью извлечения проб подстилки для анализа.
Фиг. 32 изображает устройство 68, установленное на модуле 6 с, например, на раскрытом выше. Данное устройство выполнено с возможностью сбора силоса, разбросанного животными на участке потребления. Устройство содержит горизонтальную стенку 680, установленную на ножках, выполненную с установочным углублением, и по меньшей мере один червячный винт 681, установленный на двух кронштейнах 682, шарнирно соединенных со стенкой 680. Червячный винт соединен с возможностью вращения с тяговым мотором 683. Червячный винт 681 проходит поперечно направлению продвижения устройства, обращенного к участку потребления силоса. Винт приводят в контакт с полом и, за счет вращения винта, сдвигают силос в сторону участка или зоны потребления.
Дистанционно-управляемый модуль для перемещения по полу, который оснащен распределительной насадкой и может быть оснащен малообъемным резервуаром распределяемого материала, выполненным с возможностью пополнения средством подачи материала, транспортируемым блоком 1 отслеживания и соединенным гибкой трубой со специально выделенным источником за пределами животноводческого помещения.
Перевозимый калибровочный блок для калибровки разнообразных датчиков, установленных как в помещении, так и на блоке 1 отслеживания, может быть связан с раскрываемым агрегатом отслеживания и вмешательства. Блок данного типа позволяет калибровать датчики разных животноводческих помещений и разных блоков отслеживания.
Выше был раскрыт модуль 2d распределения подстилочных материалов, выполненный с возможностью отделения от блока 1 отслеживания, однако в одной из разновидностей, данный модуль стационарно прикреплен к указанному блоку 1 отслеживания.
Кроме того, указанные разнообразные модули содержат соединительные средства, выполненные с возможностью блокирования и разблокирования и обеспечивающие возможность соединения с другими модулями.
Предложенный блок 1 отслеживания предпочтительно оснащен средствами обнаружения присутствия людей в животноводческом помещении. Эти средства могут включать в себя одну или несколько камер, связанных с программными средствами искусственного интеллекта, выполненными с возможностью отличения присутствия человека от присутствия сельскохозяйственных животных. В случае обнаружения присутствия человека, движущийся модуль или модули останавливают и выключают.
При обнаружении присутствия человека, может сработать тревожная сигнализация, благодаря чему фермер будет извещен о несанкционированном проникновении в помещение.
Предложенный агрегат отслеживания обеспечивает преимущество, состоящее в возможности взаимодействия с животными и с лицами, входящими в животноводческое помещение. Данный животноводческий агрегат также выполнен с возможностью незамедлительного воздействия на систему, управляющую условиями окружающей среды здания, для устранения той или иной проблемы с окружающей средой или чем-либо еще. Обычно, но не обязательно, система данного типа содержит один или несколько вентиляторов, один или несколько вытяжных вентиляторов, одно или несколько устройств дезинфекции воздуха или одно или несколько устройств фильтрации воздуха.
Пневмотранспорт материалов позволяет, в частности, раздавать множество материалов одновременно посредством либо насадки 23, либо ствола 26, либо иного распределительного элемента, установленного на модуле 2g. Материалы могут представлять собой твердые, жидкие или газообразные вещества или их смесь. Некоторые из применяемых газов могут обладать лечебными или дезинфекционными свойствами. Такие газы можно применять, в частности, для дезинфекции животноводческого помещения и его оборудования, а также труб транспорта кормовых материалов.
Наличие камер и выдаваемых ими изображений обеспечивает возможность дистанционного приведения в действие дистанционно-управляемых модулей и управления ими блоком 3 обработки. В частности, камеры обеспечивают возможность обнаружения проблем, которые могут возникнуть в стаде в целом, в группе животных или у одного животного. Если животные все время стоят, это может быть следствием того, что подстилка является влажной в некоторых местах. На этот случай, предложенный агрегат отслеживания и вмешательства выполнен с возможностью измерения температуры подстилки и опционально ее влагосодержания, а также запуска операции распределения осушающего вещества или свежей подстилки и управления этой операцией.
Наличие камер и выдаваемых ими изображений, а также анализ этих изображений, также обеспечивают возможность выполнения операций раздачи порций корма в кормушки в фоновом режиме. А именно, во время подачи кормового материала в какую-либо кормушку, устройство может анализировать потребность в кормовом материале в другой кормушке.
Независимо от обнаруженной проблемы, агрегат отслеживания и вмешательства оповещает фермера с помощью любых известных средств. Далее фермер может, в случае необходимости, управлять необходимыми вмешательствами или запретить какое-либо вмешательство.
Агрегат отслеживания также выполнен с возможностью анализа экскрементов животных и оценки состояния их здоровья.
И наконец, агрегат отслеживания и вмешательства содержит средства самодиагностики и выполнен с возможностью отслеживания правильности функционирования оборудования животноводческого помещения.
Раскрытый агрегат отслеживания предпочтительно содержит множество функциональных блоков, выполненных с возможностью подачи в модули 2d, 2d', 2е, 2g вмешательства твердых, газообразных или жидких материалов и, в частности, анализа окружающего воздуха в помещении, а также выделений, образующихся в помещении, в частности - из подстилки, экскрементов и т.п. Как показано на Фиг. 33, каждый из этих разнообразных функциональных блоков установлен на средстве взвешивания, при этом они упорядоченно расположены вокруг раздаточных или всасывающих труб с запорной арматурой. Фиг. 33 изображает агрегат отслеживания, содержащий блок 1000, выполненный с возможностью подачи добавок к порции корма, блок 1010 подготовки порций корма, выполняющий функции дозирования, резки, измельчения и смешивания, блок 1020 генерирования дезинфицирующего средства и/или ионизирующего газа, блок 1030 генерирования жидкого дезинфицирующего средства, блок 1040 генерирования порошкообразного дезинфицирующего средства, блок 1050 ввода твердых и жидких добавок, блок 1060 подготовки подстилки, блок 1070, образующий резервуар пожарной воды, блок 1080, образующий резервуар огнетушащего порошка или пены, блок 1090 мойки под высоким давлением. Также можно видеть, что агрегат отслеживания содержит блок 1100, включающий в себя станцию забора и химического, физического и биологического анализа проб воздуха в здании, и блок 1110 отправки или продвижения материалов, поданных блоками 1000, 1010, 1050 и 1060, одному из активных модулей 2d, 2d', 2е, 2g раздачи, при этом в блоке 1110 продвижения указанных материалов могут быть применены технические решения пневмотранспорта или какое-либо иное техническое решение.
Следует отметить, что по меньшей мере станция 1100 может быть общей для множества агрегатов отслеживания и вмешательства.
Очевидно, что настоящее изобретение может включать в себя любую схему и разновидность из ряда эквивалентных технических решений без отступления от объема настоящего изобретения, определенного нижеследующими пунктами формулы. Также очевидно, что настоящее изобретение может найти применение не только в животноводстве, но и в производственных помещениях для выполнения задач по отслеживанию и вмешательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖИВОТНОВОДЧЕСКОЕ ПОМЕЩЕНИЕ - МЕХАНИЗИРОВАННЫЙ КОРОВНИК | 2021 |
|
RU2787054C1 |
| ПНЕВМАТИЧЕСКИЙ ТРАНСПОРТЕР ДЛЯ РАСПРЕДЕЛЕНИЯ ВОЛОКНИСТЫХ МАТЕРИАЛОВ И ДРУГИХ ПРОДУКТОВ ПО ТРУБАМ | 2008 |
|
RU2463237C2 |
| ЖИВОТНОВОДЧЕСКАЯ ФЕРМА С ПРИМЕНЕНИЕМ ПОМЕЩЕНИЙ КРУГЛОЙ ФОРМЫ И СПОСОБ СОДЕРЖАНИЯ В НЕЙ, НАПРИМЕР, КРУПНОГО РОГАТОГО СКОТА | 1995 |
|
RU2106081C1 |
| Животноводческое помещение | 1984 |
|
SU1166752A1 |
| МАЛОГАБАРИТНЫЙ АГРЕГАТ ДЛЯ ВНЕСЕНИЯ ПОДСТИЛКИ | 2000 |
|
RU2173516C1 |
| БОКС ДЛЯ РАЗВЕДЕНИЯ ЖИВОТНЫХ | 1997 |
|
RU2182421C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ И/ИЛИ ОТСЛЕЖИВАНИЯ ГОНОЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ НА ГОНОЧНОМ ТРЕКЕ | 2011 |
|
RU2583728C2 |
| СИСТЕМА ПЕРЕРАБОТКИ НАВОЗА | 2006 |
|
RU2321984C1 |
| УСТАНОВКА ДЛЯ ВЫРАЩИВАНИЯ ДОЖДЕВЫХ ЧЕРВЕЙ | 1992 |
|
RU2045180C1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
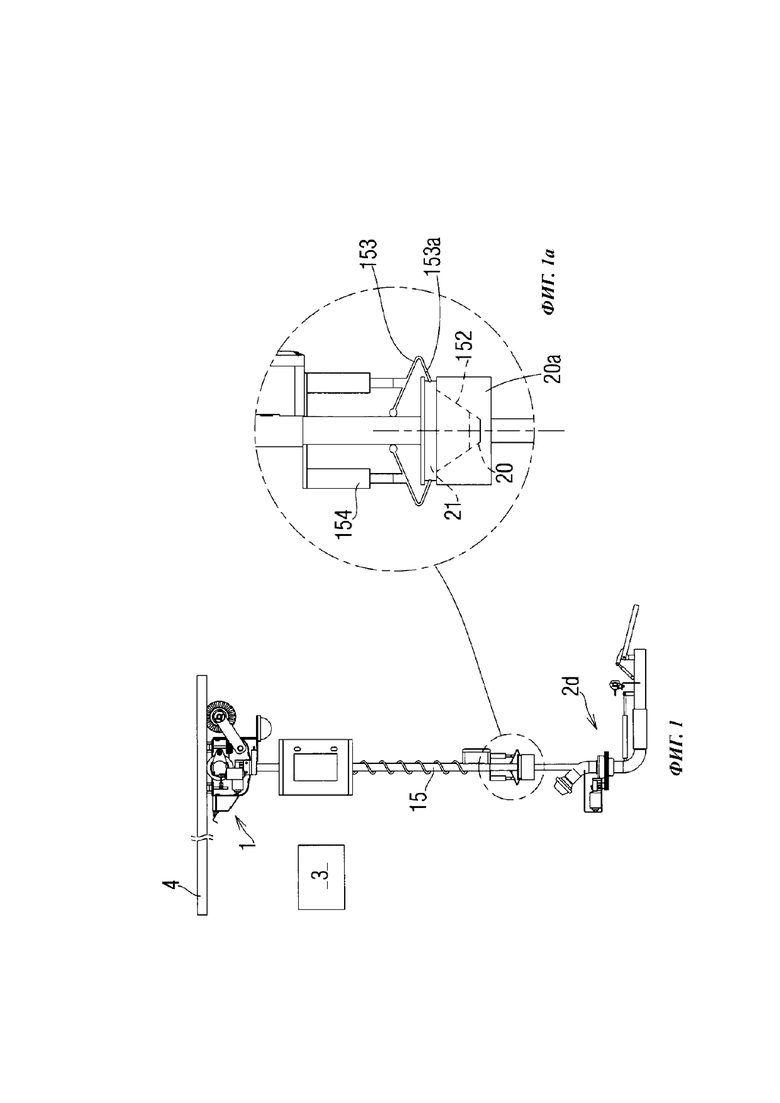
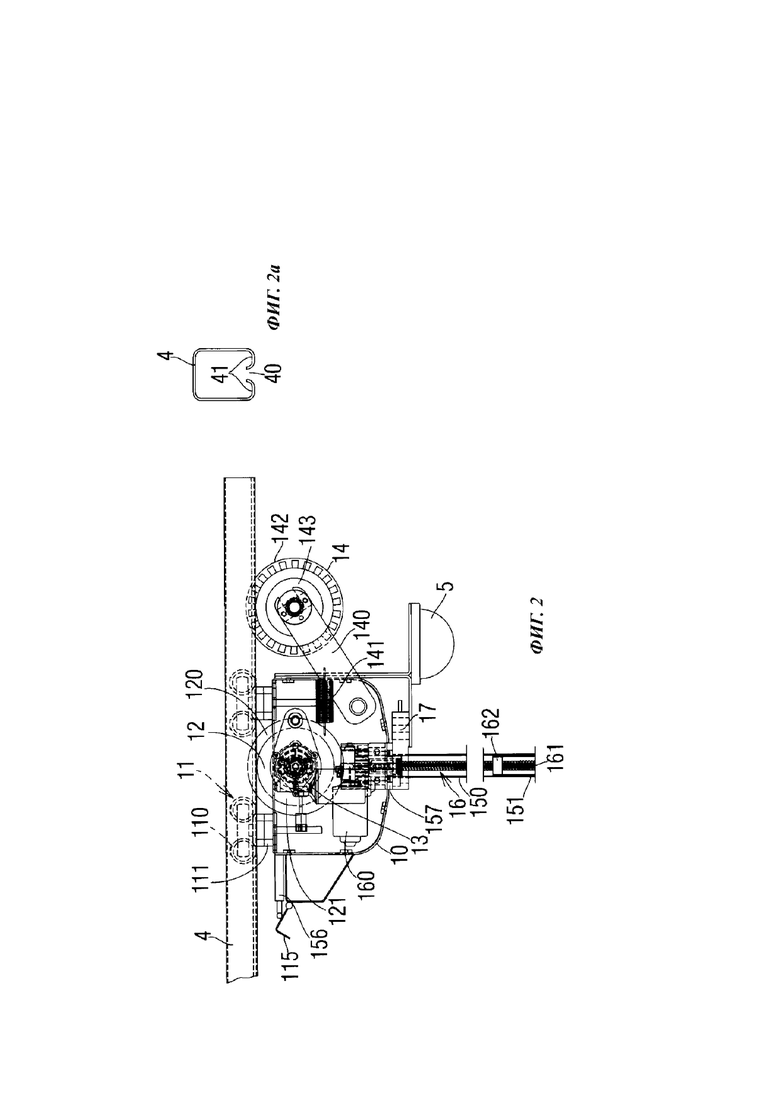
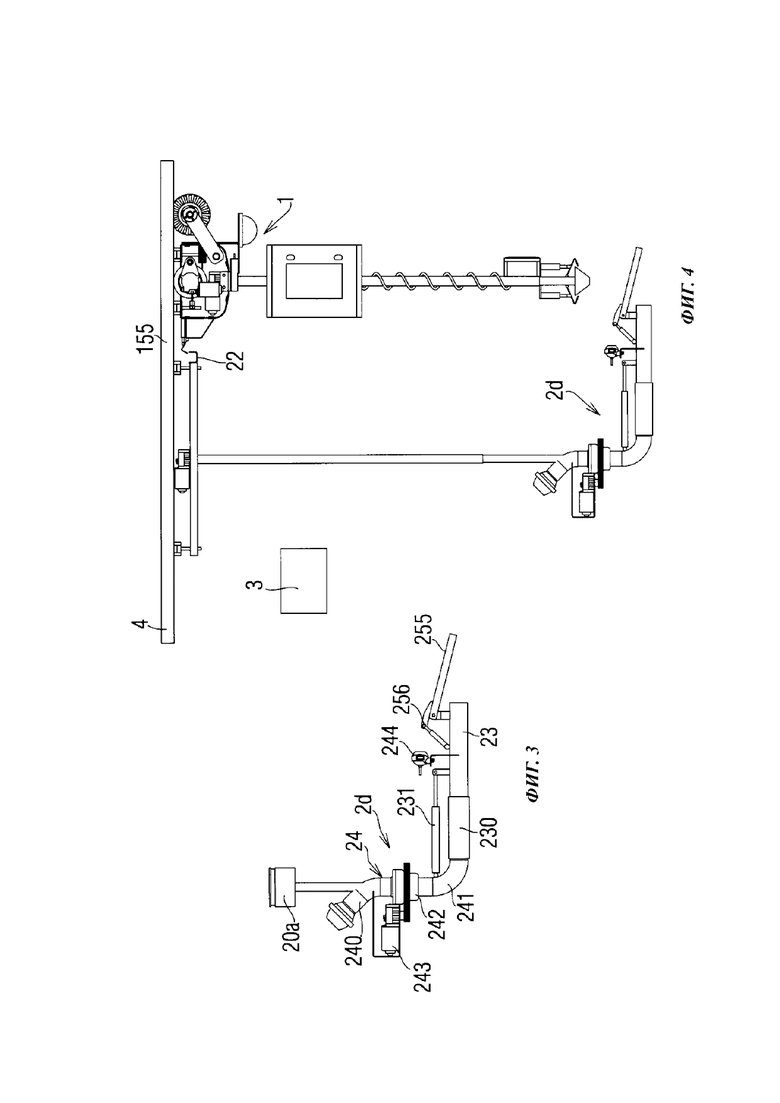
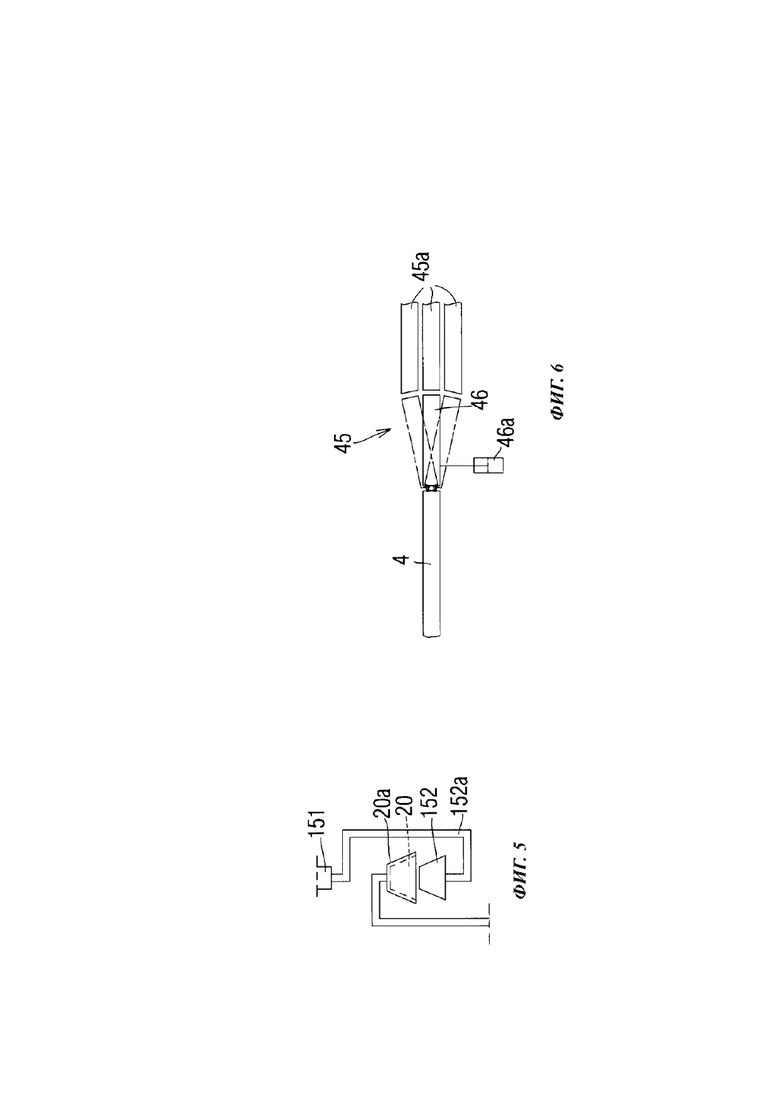
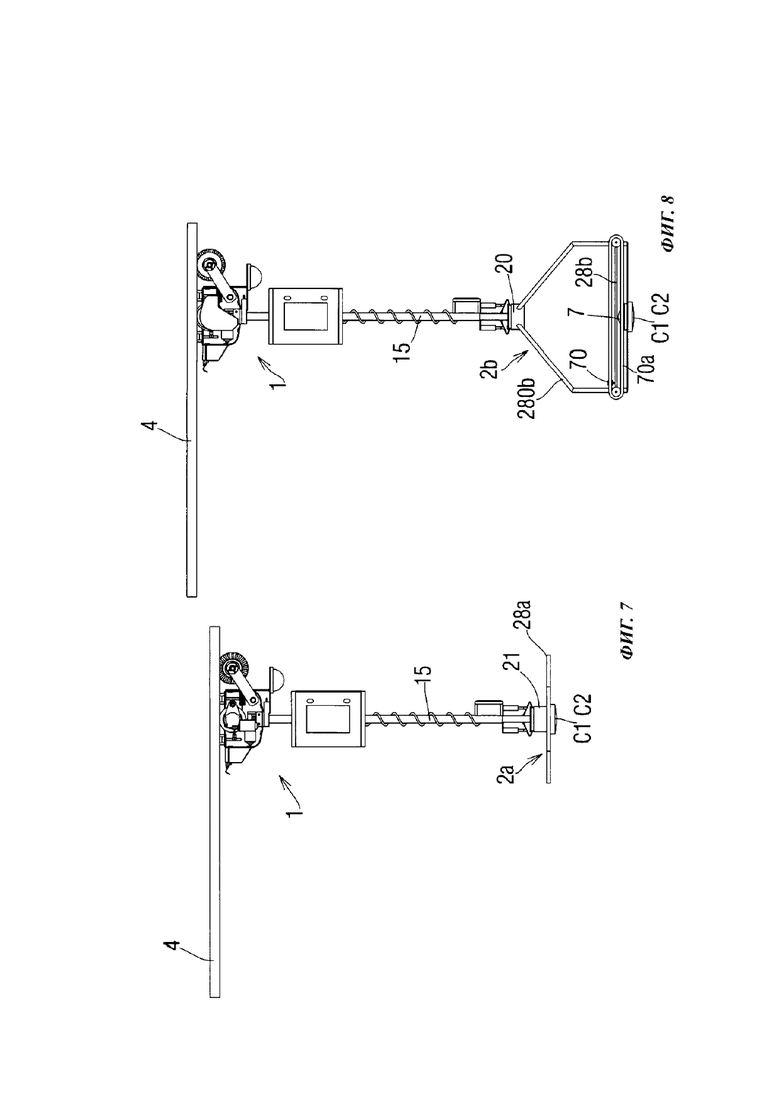
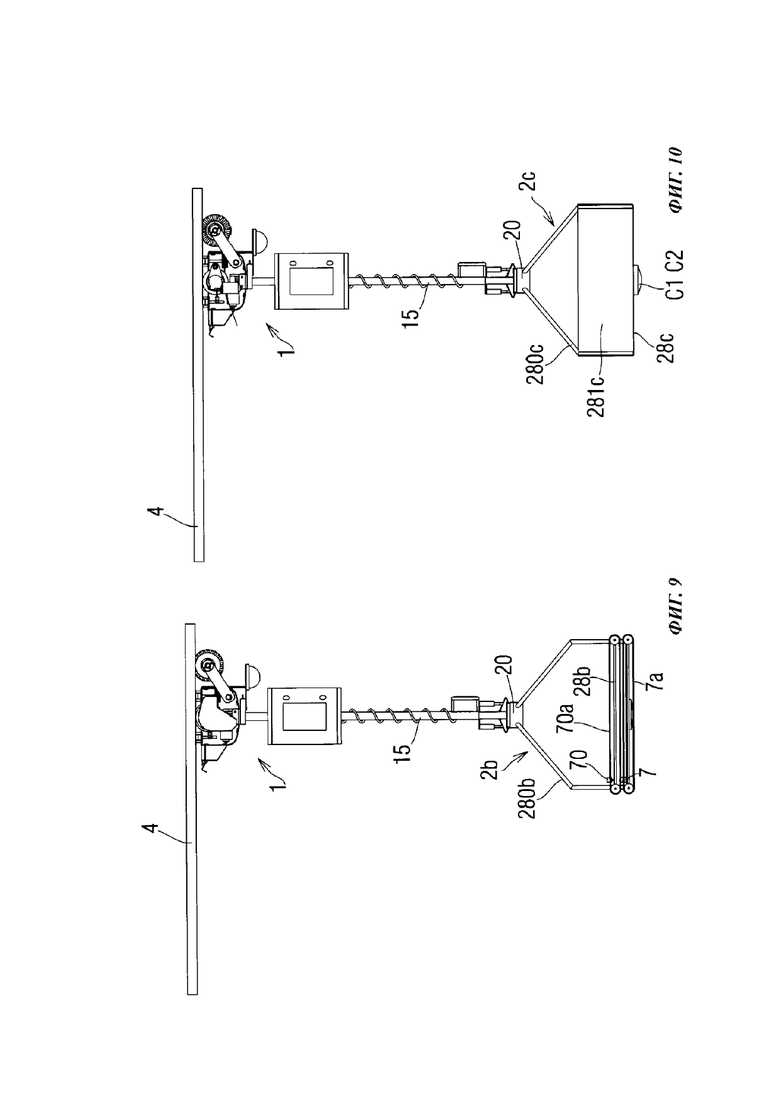
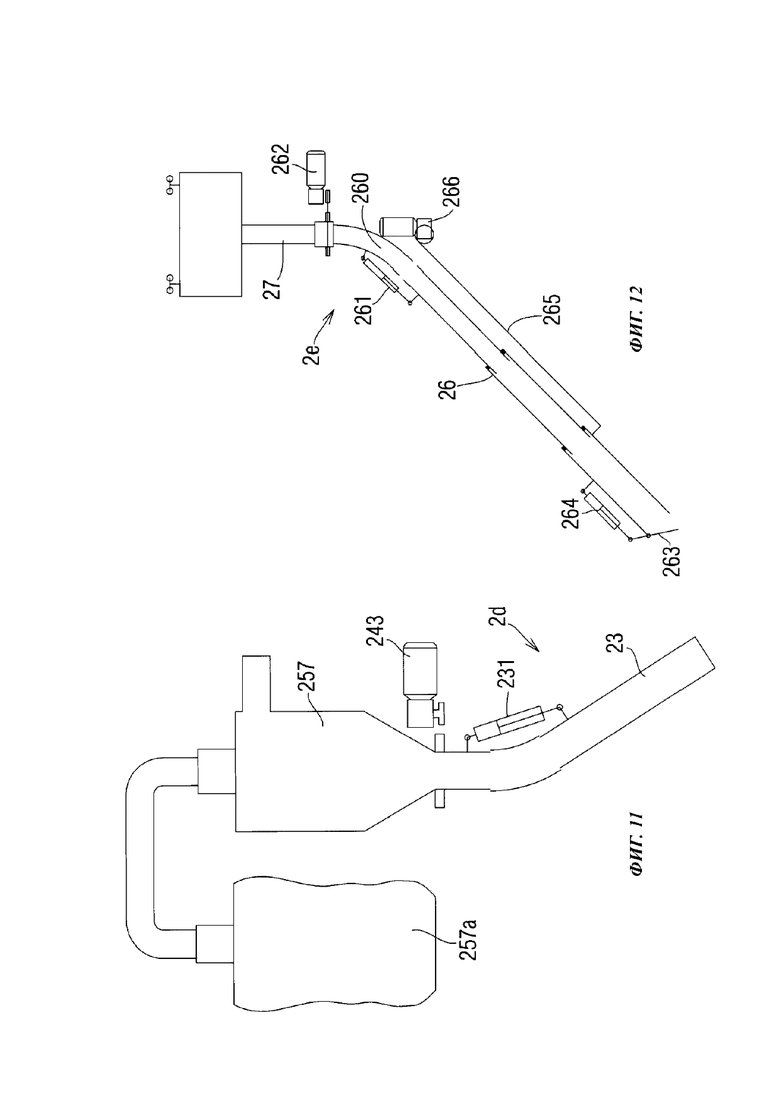
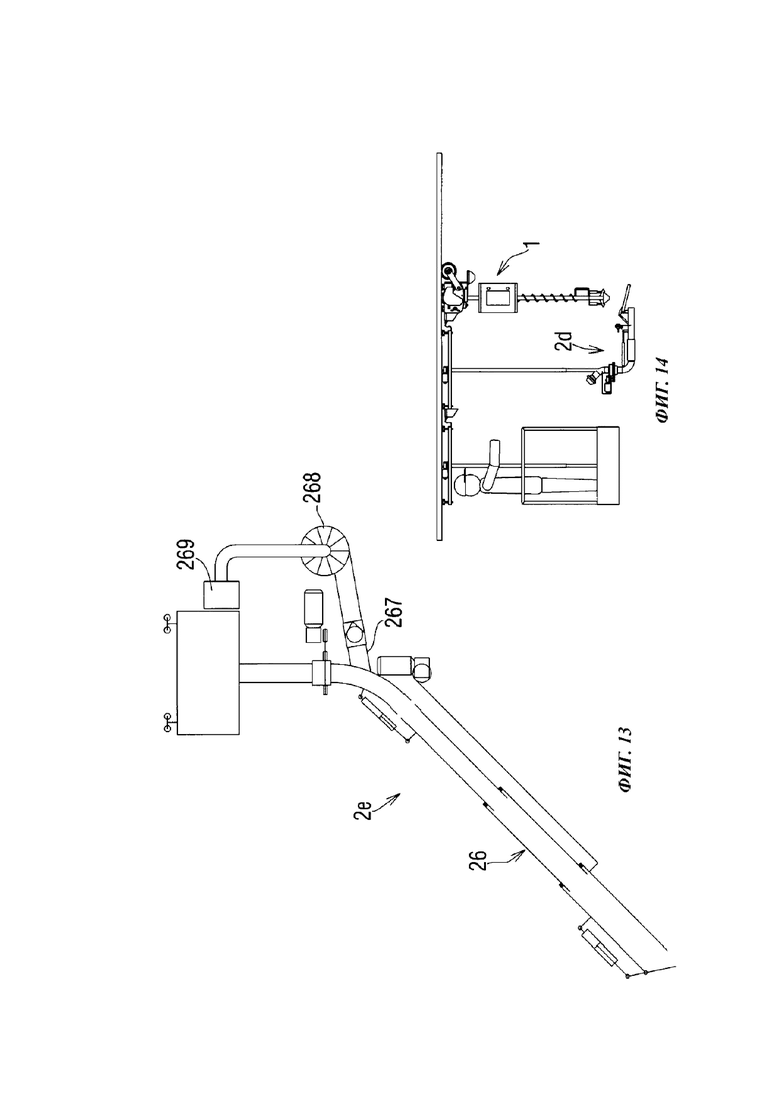
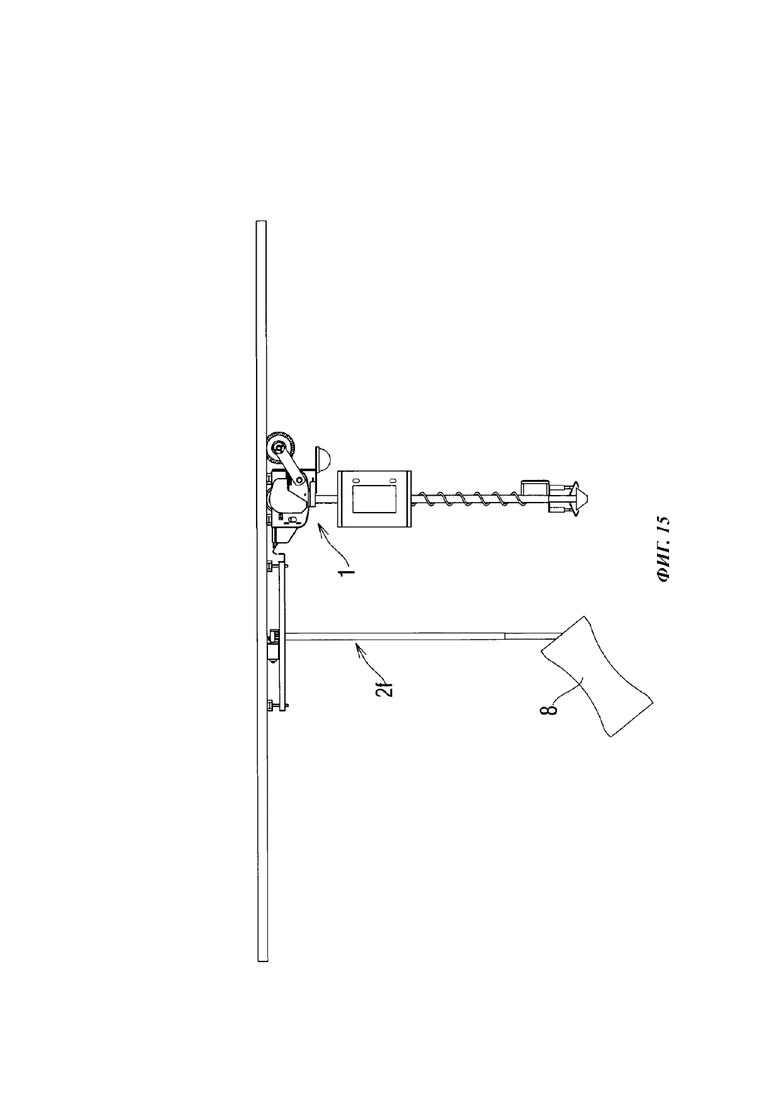
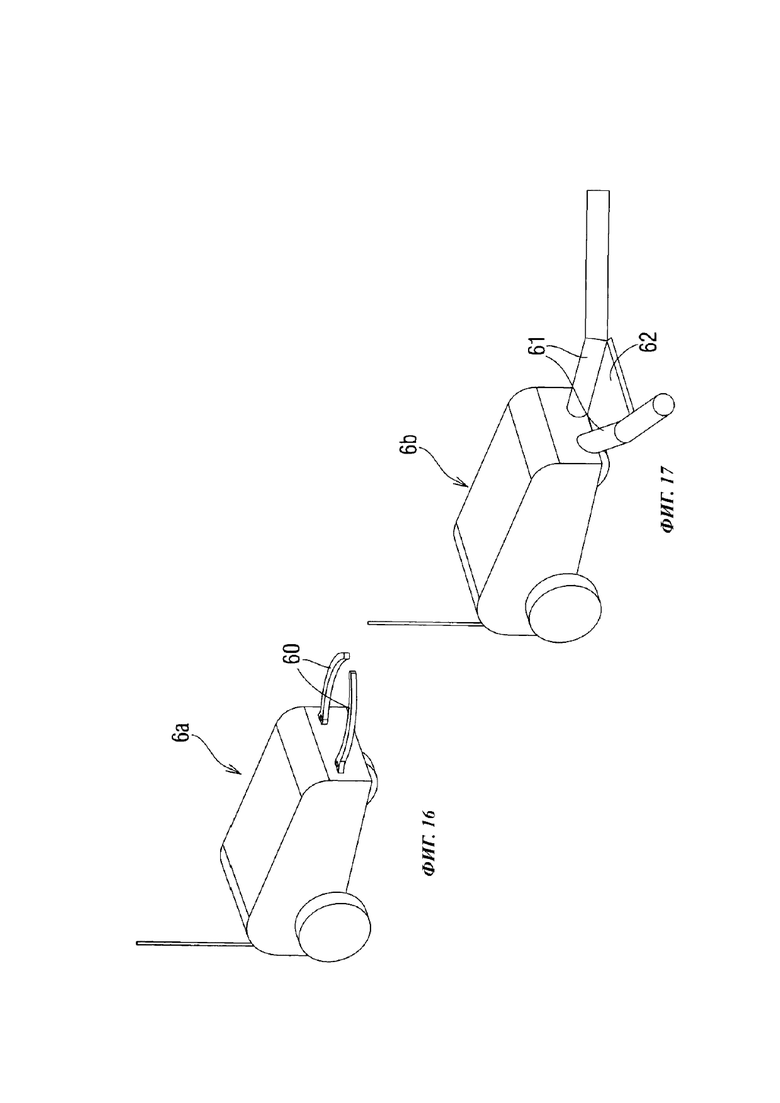
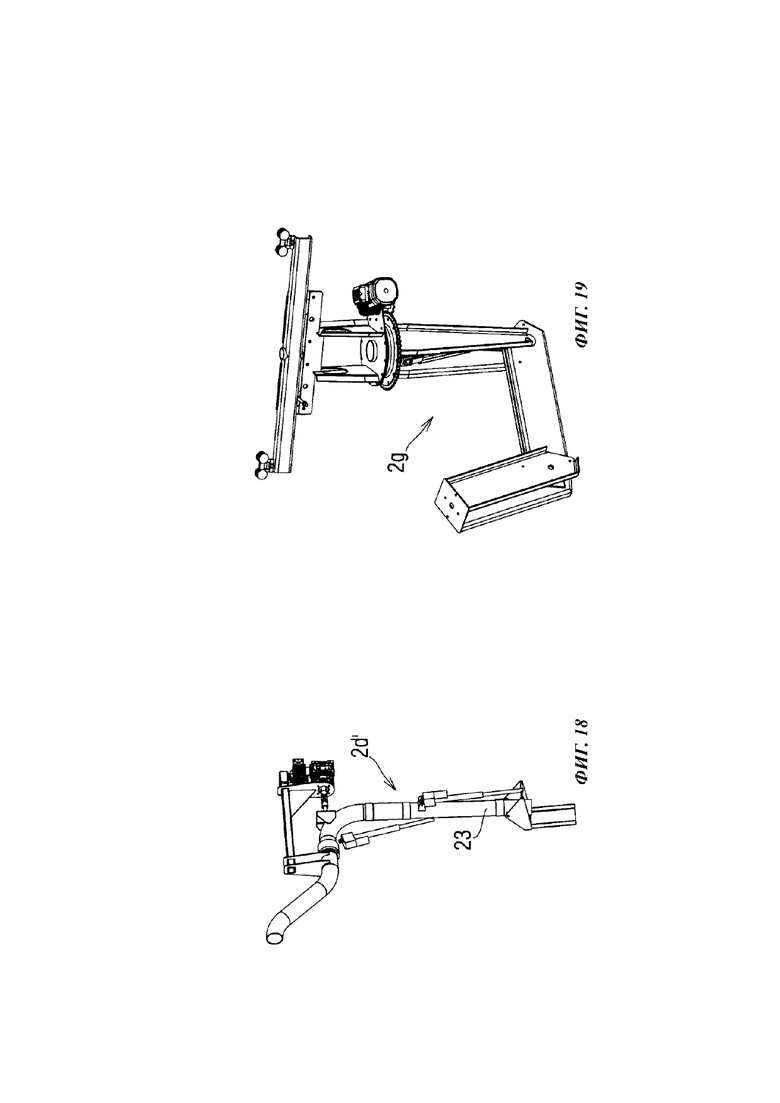
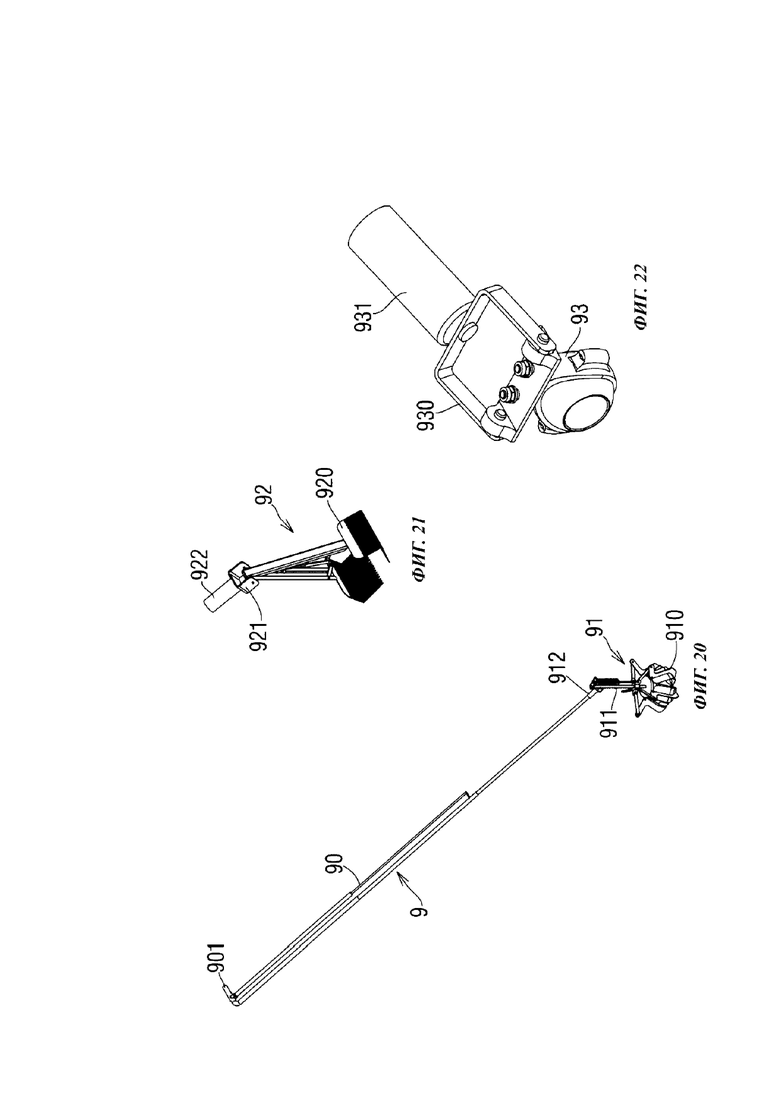
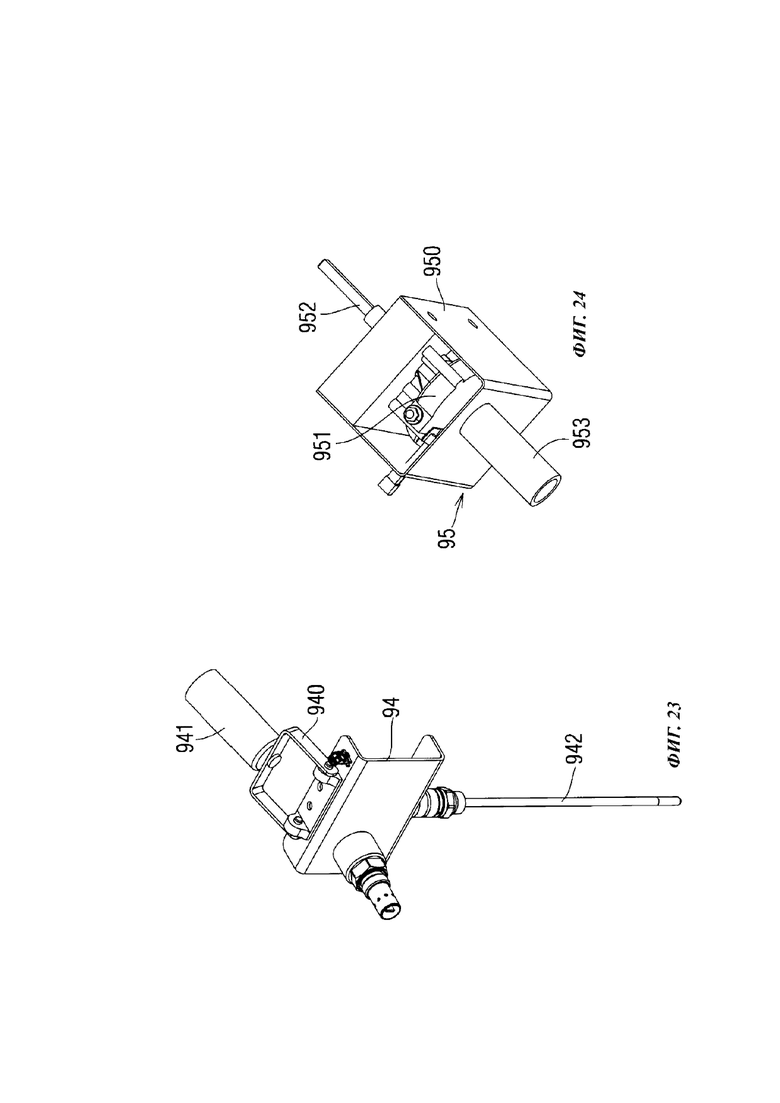
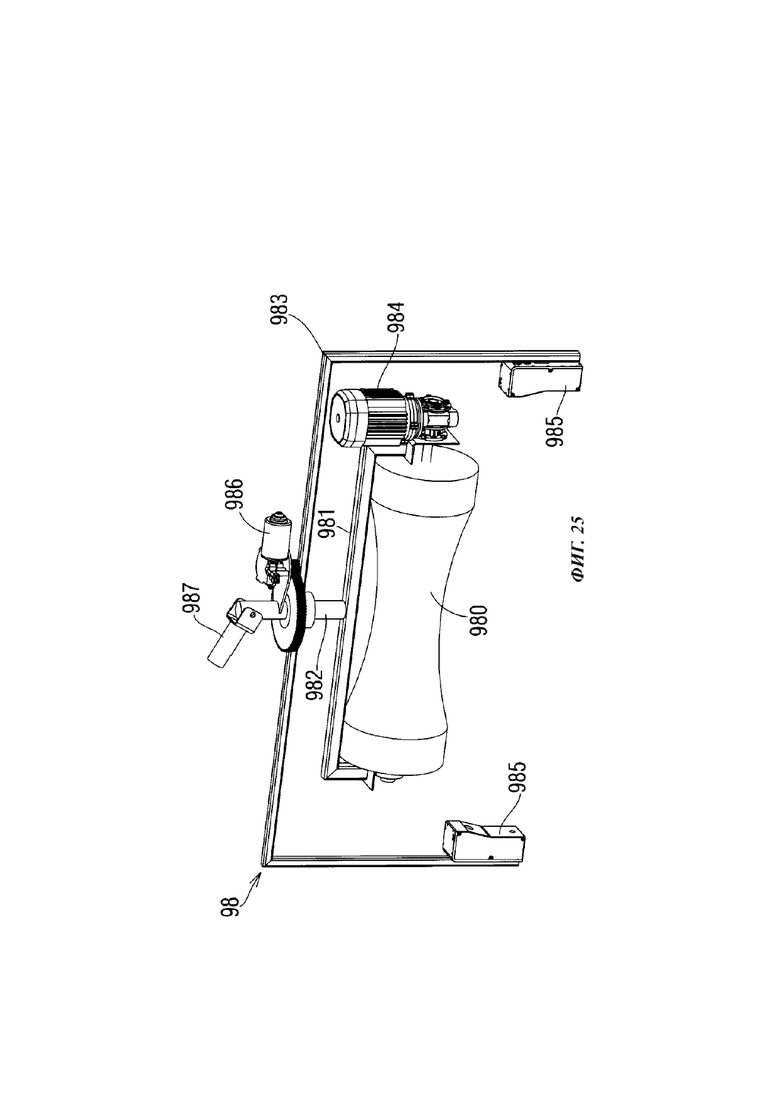
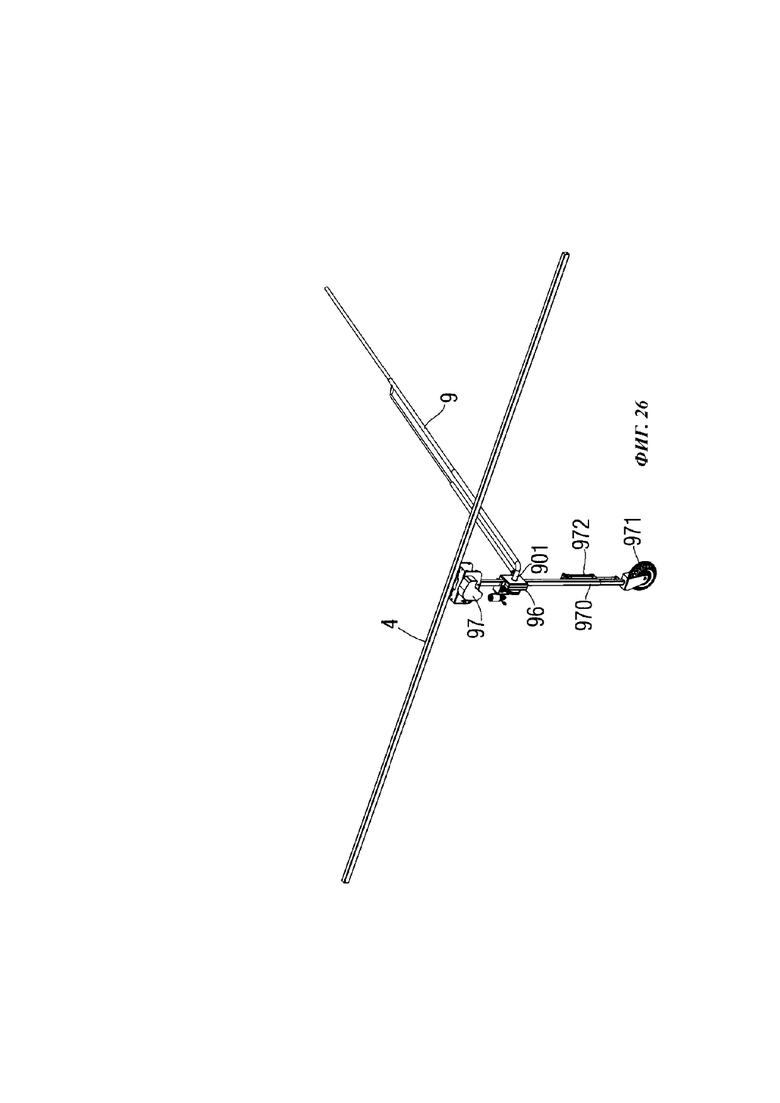
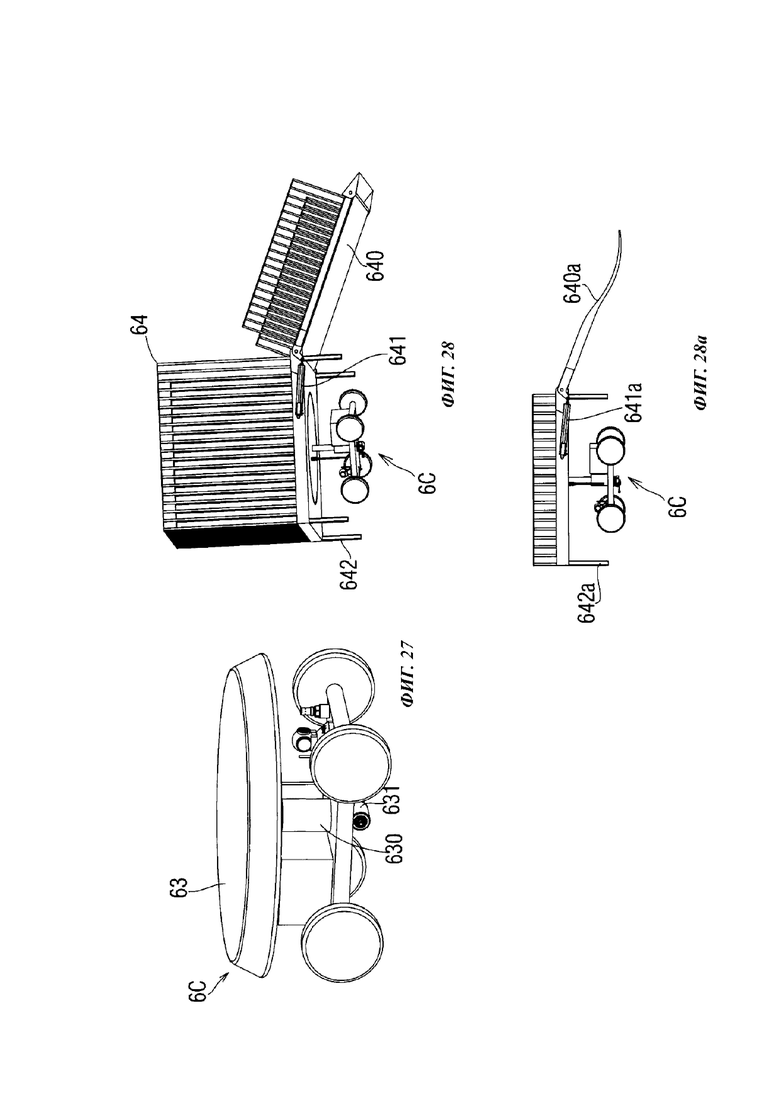
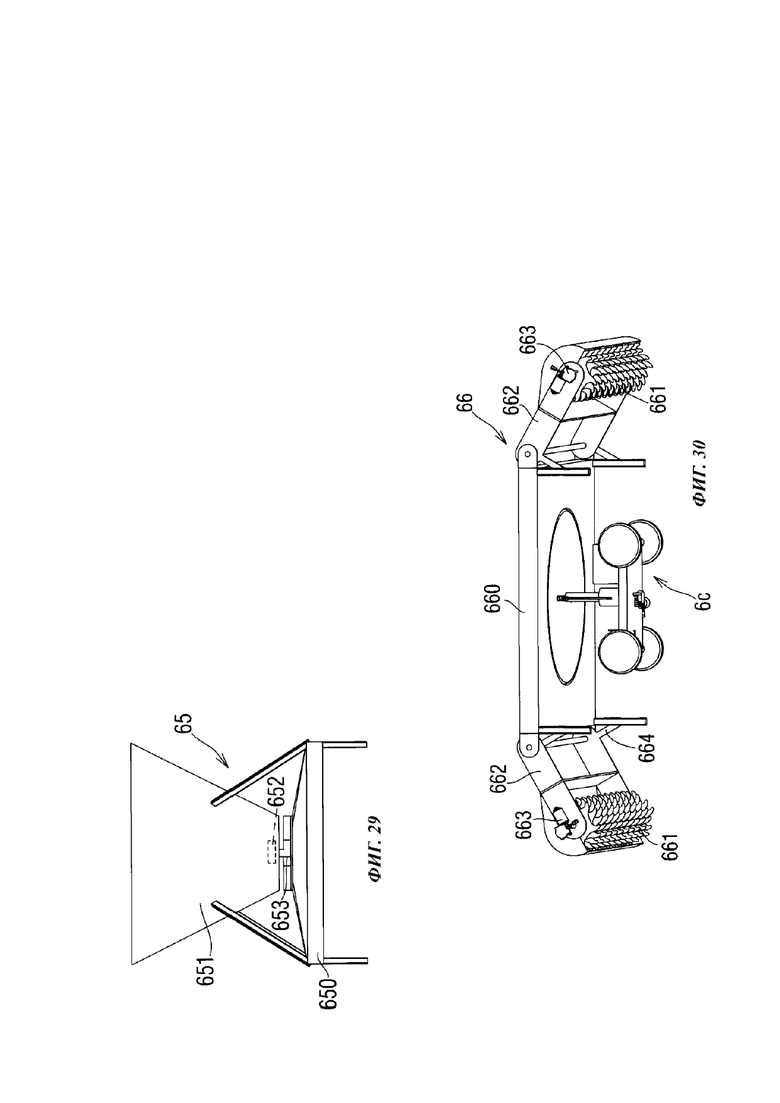
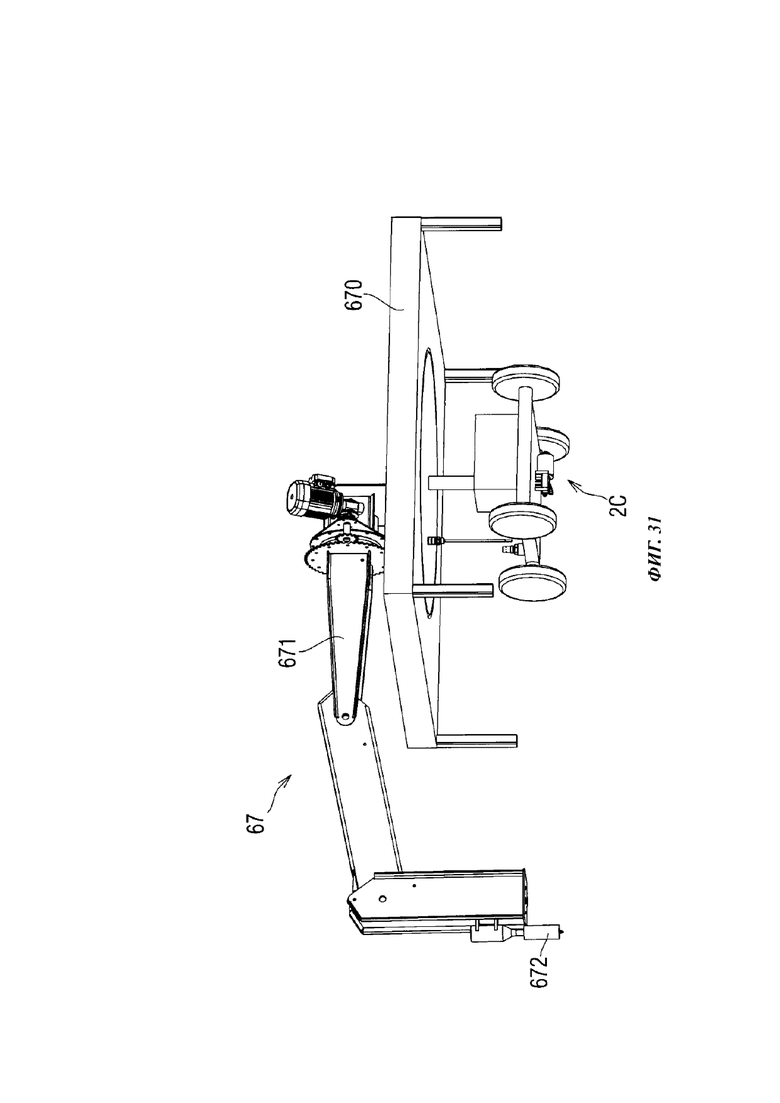
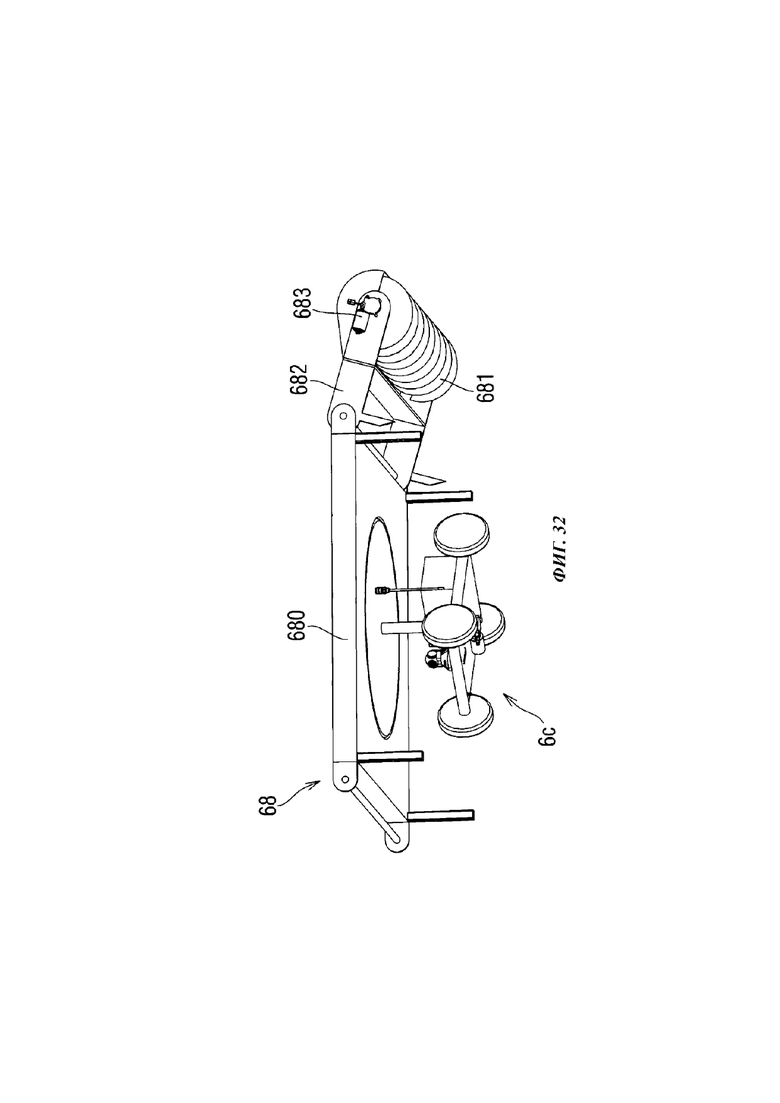
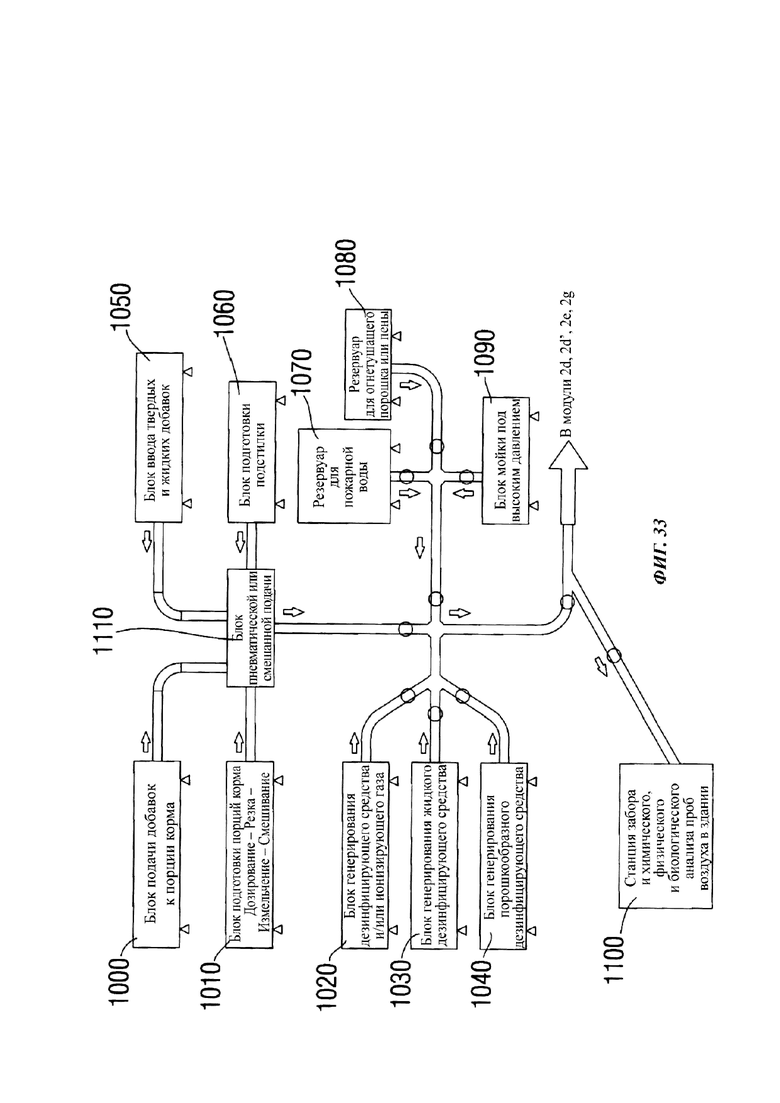
Изобретение относится к оборудованию и технологиям, применяемым в области животноводства, в частности, для отслеживания животноводческого помещения и проживающих в нем животных. Агрегат включает передвижной блок (1) отслеживания, оснащенный средствами отслеживания животноводческого помещения и проживающих в нем животных, при этом предусмотрена возможность определения географических координат указанного блока в помещении относительно исходной точки, по меньшей мере один передвижной модуль (2а) вмешательства, выполненный с возможностью перемещения и управления посредством указанного блока (1) отслеживания. Модуль вмешательства в состоянии покоя установлен в зоне хранения. Блок отслеживания и модуль вмешательства содержат взаимодействующие механические соединительные средства для соединения друг с другом. Указанные средства выполнены с возможностью блокирования и разблокирования. Блок отслеживания выполнен с возможностью непрерывного отслеживания помещения и животных, не будучи при этом соединенным с модулем вмешательства или одним из модулей вмешательства. Изобретение обеспечивает непрерывное отслеживание и анализ аномалий и их уменьшение или устранение. 43 з.п. ф-лы, 33 ил.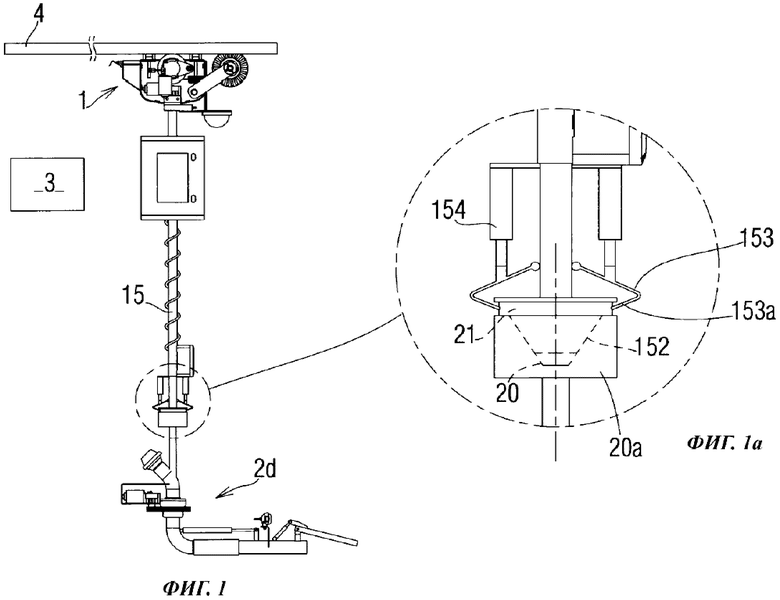
1. Агрегат отслеживания и вмешательства для животноводческого помещения, отличающийся тем, что он содержит:
- передвижной блок (1) отслеживания, оснащенный средствами отслеживания животноводческого помещения и проживающих в нем животных, при этом предусмотрена возможность определения географических координат указанного блока в помещении относительно исходной точки,
- по меньшей мере один передвижной модуль (2а, 2b, 2с, 2d, 2е, 2f, 2g, 2h) вмешательства, выбранный из модуля (2а, 2b, 2с) взвешивания, модуля (2d) разбрасывания и распределения, дополнительного модуля (2е) разбрасывания, распределения или удаления, модуля (2f) чистки щеткой, модуля (2g) перемещения и манипулирования, модуля (2h) перемещения персонала и выполненный с возможностью приведения в действие и управления посредством указанного блока (1) отслеживания, при этом, когда модуль вмешательства бездействует, он установлен в месте хранения,
при этом и указанный блок (1) отслеживания, и указанный модуль (2а, 2b, 2с, 2d, 2е, 2f, 2g, 2h) вмешательства содержат взаимодействующие механические соединительные средства для соединения друг с другом, выполненные с возможностью блокирования и разблокирования, при этом указанный блок отслеживания выполнен с возможностью непрерывного отслеживания помещения и животных, не будучи при этом соединен с модулем вмешательства или одним из модулей вмешательства.
2. Агрегат по п. 1, отличающийся тем, что он содержит блок (3) обработки, выполненный с возможностью осуществления связи с блоком (1) отслеживания, при этом указанный блок (3) обработки выполнен с возможностью приема данных и сигналов, испускаемых по меньшей мере указанным средством отслеживания, содержащимся в блоке отслеживания, анализа указанных данных и сигналов, постановки диагноза и, при необходимости, приведения в действие блока отслеживания для управления вмешательством.
3. Агрегат по п. 1 или 2, отличающийся тем, что блок (1) отслеживания подвешен на направляющем рельсе (4), установленном над полом, при этом указанный блок (1) отслеживания содержит средство приведения в движение вдоль направляющего рельса (4).
4. Агрегат по предыдущему пункту, отличающийся тем, что:
- направляющий рельс (4) образован трубчатым профилем четырехугольного поперечного сечения и содержит продольный паз (40), выполненный в его нижней стенке, которая образует две направляющие дорожки (41) по обе стороны от паза (40),
- блок (1) отслеживания содержит шасси (10) в виде тележки, к которой прикреплены направляющие средства (11) вдоль рельса с опиранием на направляющие дорожки (41),
- указанное средство приведения в движение образовано приводным колесом (12), соединенным с тяговым приводом (13), прикрепленным к шасси (10), при этом указанное приводное колесо (12) прижато, через его бандаж, к наружной стороне нижней стенки направляющего рельса (4),
- указанное приводное колесо образовано центральным металлическим диском (120), закрепленным между двумя боковыми фланцами (121), наружная кромка которых образует бандаж,
- диаметр центрального диска (120) больше диаметра боковых фланцев (121), при этом центральный диск проходит в направляющий рельс (4) через паз (40).
5. Агрегат по любому из предыдущих пунктов, отличающийся тем, что блок (1) отслеживания содержит средство указания его положения вдоль направляющего рельса (4) относительно опорной или исходной точки, механически прикрепленное к рельсу (4).
6. Агрегат по предыдущему пункту, отличающийся тем, что средство указания образовано ведомым колесом (14), прижатым к рельсу, и средством измерения углового смещения ведомого колеса (14).
7. Агрегат по предыдущему пункту, отличающийся тем, что ведомое колесо (14) образовано центральным диском (142), закрепленным между двумя боковыми фланцами (143), каждый из которых содержит кромку, образующую бандаж, при этом диаметр центрального диска (142) больше диаметра боковых фланцев (143) для обеспечения возможности прохождения в направляющий рельс (4) через паз (40).
8. Агрегат по п. 2, отличающийся тем, что по меньшей мере одно средство отслеживания блока (1) отслеживания содержит по меньшей мере одно устройство (5) получения изображений, выполненное с возможностью выдачи изображений помещения и проживающих в нем животных, при этом блок (3) обработки содержит средства анализа изображений.
9. Агрегат по предыдущему пункту, отличающийся тем, что указанное средство получения изображений образовано видеокамерой.
10. Агрегат по любому из пп. 2, 8, 9, отличающийся тем, что указанные средства отслеживания образованы одним или несколькими средствами, выбранными из следующего: датчик количества аммиака, датчик количества углекислого газа, датчик количества кислорода, датчик температуры, датчик влаги, фотометр, анемометр, датчик типа «черный шар», датчик пыли, микрофон и инфразвуковой датчик.
11. Агрегат по любому из пп. 2, 8, 9, 10, отличающийся тем, что блок (1) отслеживания оснащен средством отслеживания, включающим в себя устройство регистрации звука.
12. Агрегат по п. 4, отличающийся тем, что соединительное средство, содержащееся в блоке (1), образовано выдвижной штангой (15), установленной на шасси (10) и приводимой в выдвинутое положение или втянутое положение посредством приводного двигательного механизма (16), при этом штанга (15) содержит на своем нижнем конце средство стыковки модуля (2), выполненное для взаимодействия, путем стыковки, с ответным средством стыковки, установленным на модуле (2) или каждом из модулей (2).
13. Агрегат по предыдущему пункту, отличающийся тем, что средства стыковки образованы, с одной стороны, поворотным крюком (155), шарнирно соединенным с шасси (10) блока (1) отслеживания и связанным с приводом (156) перемещения, содержащимся в указанном блоке (1) отслеживания, а с другой стороны, соединительным кольцом (22), содержащимся в модуле вмешательства (2) и выполненным с возможностью вмещения поворотного крюка (155) путем посадки с геометрическим замыканием, при этом указанный модуль вмешательства (2) подвешен таким образом, чтобы, в зависимости от того, находится ли он в рабочем состоянии или в состоянии бездействия, он находился либо на направляющем рельсе (4), либо в зоне (45) хранения, примыкающей к рельсу (4), при этом указанная зона хранения связана с рельсом (4) через точку (46) сопряжения.
14. Агрегат по п. 12, отличающийся тем, что блок (1) отслеживания содержит датчики (17) деформации, установленные между шасси (10) указанного блока (1) и выдвижной вертикальной штангой (15).
15. Агрегат по любому из предыдущих пунктов, отличающийся тем, что каждый из модулей (2а, 2b, 2с) взвешивания снабжен жесткой горизонтальной плитой (28а, 28b, 28с), причем нижняя сторона плиты каждого модуля взвешивания вмещает по меньшей мере один датчик (С1) температуры, по меньшей мере один датчик (С2) влаги и по меньшей мере один датчик для анализа химического состава подстилки и экскрементов.
16. Агрегат по предыдущему пункту, отличающийся тем, что указанный по меньшей мере один модуль (2b) взвешивания содержит средства проверки состояния здоровья ног животных, которое активно во время взвешивания для обнаружения травм и инфекций.
17. Агрегат по предыдущему пункту, отличающийся тем, что горизонтальная плита (28b), которой снабжен модуль взвешивания (2b), размещена в герметичном параллелепипедальном ящике, верхняя горизонтальная стенка которого выполнена с возможностью приема животных и выполнена из материала, проницаемого для света, при этом средство проверки состояния здоровья ног содержит средство (7) получения изображений, помещенное в указанный герметичный ящик под светопроницаемой верхней стенкой, причем оптическая ось устройства (7) направлена в сторону указанной верхней светопроницаемой стенки, причем блок (3) обработки выполнен с возможностью анализа сигналов, выдаваемых устройством (7) получения изображений.
18. Агрегат по предыдущему пункту, отличающийся тем, что устройство (7) получения изображений образовано по меньшей мере одной видеокамерой.
19. Агрегат по п. 17, отличающийся тем, что устройство (7) получения изображений образовано множеством формирователей сигнала изображения, расположенных и прочно прикрепленных в ряд на оборудовании, установленном с возможностью передвижения на параллельных горизонтальных ползунах, установленных в ящике под верхней светопроницаемой стенкой указанного ящика, при этом указанное передвижное оборудование выполнено с возможностью перемещения в ящике под указанной верхней стенкой посредством привода.
20. Агрегат по любому из пп. 17-19, отличающийся тем, что ящик оснащен средством очистки, образованным скребковым средством (70), выполненным с возможностью движения по светопроницаемой верхней стенке и опирания на нее, при этом указанное скребковое средство может быть приведено в движение вдоль указанной верхней светопроницаемой стенки посредством привода.
21. Агрегат по предыдущему пункту, отличающийся тем, что со скребковым средством (70) связано множество сопел для распыления очищающей жидкости.
22. Агрегат по любому из предыдущих пунктов, отличающийся тем, что содержит модуль (2d, 2d') разбрасывания и распределения, подача материалов в который предусмотрена по гибкой трубе, причем распределительный модуль содержит средство (23) распределения и раздачи, образованное насадкой, установленной на жесткой подающей трубе (24), образованной двумя трубными участками: верхним по потоку (240) и нижним по потоку (241), соединенными друг с другом шарнирным соединением (242), при этом указанная насадка (23) соединена с нижним по потоку трубным участком (24) посредством упругодеформируемой муфты (230), при этом первый привод (231) установлен между насадкой (23) и нижним по потоку трубным участком (241) путем кинематического соединения с ними, при этом второй привод (243) соединен соответственно с двумя трубными участками (240, 241) на обеих сторонах шарнирного соединения (242).
23. Агрегат по п. 22, отличающийся тем, что насадка (23) распределения и раздачи оснащена тепловизионной камерой (244).
24. Агрегат по п. 22 или 23, отличающийся тем, что насадка (23) вмещает, на уровне своего выпускного отверстия, шарнирно-соединенный направитель (255), наклон которого в сторону выпускного отверстия можно регулировать посредством привода (256).
25. Агрегат по п. 24, отличающийся тем, что содержит инфракрасные детекторы, расположенные на гибкой трубе подачи материалов, при этом указанные детекторы выполнены с возможностью обнаружения горящих предметов или высокотемпературных предметов, транспортируемых в указанной трубе, для управления перемещением направителя в сторону закрытия насадки в случае обнаружения таких предметов.
26. Агрегат по любому из пп. 22-25, отличающийся тем, что содержит акустический детектор, установленный в гибкой подающей материал трубе, выполненный с возможностью обнаружения звуков, возникающих из-за прохождения посторонних предметов, для обеспечения возможности перемещения направителя в нисходящем направлении для возврата этих предметов в приемник, установленный на насадке под ее выпускным отверстием.
27. Агрегат по любому из пп. 22-26, отличающийся тем, что содержит средство пылеудаления, установленное между верхним по потоку участком (24) жесткой трубы и гибкой подающей материал трубой.
28. Агрегат по любому из предыдущих пунктов, отличающийся тем, что дополнительный распределительный модуль (2е) содержит тележку для подвешивания на направляющем рельсе (4), к которой прикреплен посредством жесткой трубы верхний конец телескопического ствола (26), выполненного с возможностью ориентирования по азимуту и углу наклона и оснащенного приводом для втягивания и выдвижения, при этом указанный ствол содержит дальнюю секция ствола и ближнюю секцию ствола.
29. Агрегат по предыдущему пункту, отличающийся тем, что дальний конец ствола (26) содержит отсечной клапан (263), выполненный с возможностью перемещения посредством привода (264), и механическое средство втягивания под управлением блока (3) обработки, прикрепленного к двум секциям - дальней и ближней - ствола с возможностью принудительного втягивания ствола (26), когда он включен в работу, или ограничения его выдвижения.
30. Агрегат по предыдущему пункту, отличающийся тем, что механическое средство втягивания образовано тяговым канатом, прикрепленным свободным концом к дальней секции ствола, и наматывателем каната (266), прикрепленным к ближней секции, при этом указанный наматыватель каната содержит намоточный барабан, на который может быть намотан канат, привод, соединенный с намоточным барабаном, и кодовый датчик положения, соединенный с барабаном или с мотором.
31. Агрегат по любому из предыдущих пунктов, отличающийся тем, что он содержит по меньшей мере один самодвижущийся дистанционно-управляемый модуль (6а, 6b, 6с), выполненный с возможностью перемещения по полу животноводческого помещения, при этом указанный модуль (6а, 6b, 6с) содержит шасси, установленное на опертые на пол колеса.
32. Агрегат по предыдущему пункту, отличающийся тем, что один из самодвижущихся дистанционно-управляемых модулей (6а) оснащен захватными клешнями (60) для сбора мертвых или травмированных животных.
33. Агрегат по п. 31, отличающийся тем, что один из дистанционно-управляемых модулей (6b) предназначен для сбора яиц и содержит два подборных рычага, образующих V-образную конструкцию в передней зоне, и площадку для приема яиц, образованную между рычагами.
34. Агрегат по п. 31, отличающийся тем, что один из дистанционно-управляемых модулей (6с) оснащен распределительной насадкой и резервуаром распределяемого материала, выполненным с возможностью пополнения средством подачи материала, транспортируемым блоком (1) отслеживания и соединенным со специально выделенным источником, расположенным за пределами животноводческого помещения, гибкой трубой.
35. Агрегат по любому из пп. 28-30, отличающийся тем, что ствол (26) соединен с обводным клапаном (267) под управлением блока (3) обработки, причем один канал соединен со специально выделенным источником материала, а другой канал соединен с вакуумным насосом (268), связанным с газоанализатором.
36. Агрегат по п. 22, отличающийся тем, что распределительная насадка (23) является вертикальной.
37. Агрегат по п. 5, отличающийся тем, что средство указания положения блока (1) отслеживания вдоль направляющего рельса (4) образовано, с одной стороны, системой указания расстояния, установленной на направляющем рельсе (4) и содержащей метки расстояния, каждая из которых указывает расстояние от исходной точки, а с другой стороны, устройством считывания меток, содержащихся в системе указания.
38. Агрегат по п. 37, отличающийся тем, что система указания расстояния образована линейкой разметки, содержащей указания расстояния в виде чисел или условных знаков, причем считывающее устройство образовано оптическим считывателем с программными средствами оптического распознавания указаний расстояния.
39. Агрегат по любому из предыдущих пунктов, отличающийся тем, что он содержит телескопическую штангу (9), выполненную с возможностью вмещения различных съемных инструментов.
40. Агрегат по предыдущему пункту, отличающийся тем, что один из указанных инструментов представляет собой ветеринарный прибор (98) для анатомического исследования, содержащий устройства (985) неинвазивной диагностики, использующие сигналы, на основе которых можно сформировать одно или несколько изображений внутреннего пространства тела животного с последующим анализом программными средствами искусственного интеллекта, выполненными с возможностью анализа заболеваний, причем указанный прибор содержит горизонтальный снабженный приводом прижимной ролик (980), установленный с возможностью вращения между вертикальными боковыми звеньями U-образной рамы (981), горизонтальный основной участок которой в своем центре оснащен вертикальным валом (982), проходящим наружу от первой рамы (981), при этом вторая рама (983) прикреплена к данному валу своим основным участком, при этом указанная вторая рама (983) прикреплена по обе стороны от первой рамы (983) своими вертикальными боковыми участками, при этом на каждом из указанных боковых участков установлено неинвазивное диагностическое устройство (985).
41. Агрегат по п. 39 или 40, отличающийся тем, что:
- телескопическая штанга (9) оснащена хвостовиком (901) для прикрепления к узлу (96) перемещения, установленному на приводном устройстве (97), подвешенном на направляющем рельсе (4) посредством роликов и оснащенном приводным колесом, прижатым к внутренней стороне направляющего рельса (4), при этом приводное колесо соединено с мотором приводного устройства (97),
- крепежный хвостовик (901) соединен с полым валом, соединенным через блок шестерен с приводом, установленным на узле (96) перемещения,
- приводное устройство (97) оснащено вертикальной телескопической стойкой (970), содержащей опертое на пол колесо (971) у своего нижнего конца,
- телескопическая стойка (970) выполнена с возможностью приведения в выдвинутое положение посредством упругого средства (972), выполненного с возможностью плотного прижатия колеса (971) к полу.
42. Агрегат по любому из предыдущих пунктов, отличающийся тем, что он содержит множество функциональных блоков, выполненных с возможностью подачи в модули (2d, 2d', 2е, 2g) вмешательства твердых, газообразных или жидких материалов, в частности, для анализа воздуха окружающей среды помещения и выделений, образующихся в указанном помещении.
43. Агрегат по предыдущему пункту, отличающийся тем, что он содержит блок (1000), выполненный с возможностью подачи добавок к порции корма, блок (1010) подготовки порций корма, обеспечивающий функции дозирования, резки, измельчения и смешивания, блок (1020) генерирования дезинфицирующего средства и/или ионизирующего газа, блок (1030) генерирования жидкого дезинфицирующего средства, блок (1040) генерирования порошкообразного дезинфицирующего средства, блок (1050) ввода твердых и жидких добавок, блок (1060) подготовки подстилки, блок (1070), образующий резервуар для пожарной воды, блок (1080), образующий резервуар огнетушащего порошка или пены, блок (1090) мойки под высоким давлением, блок (1100), образованный станцией забора и химического, физического и биологического анализа проб воздуха в здании и образующихся в нем выделений, и блок (1110) отправки или продвижения материалов, поданных блоками (1000, 1010, 1050 и 1060), одному из активных модулей (2d, 2d', 2е, 2g) раздачи.
44. Агрегат по любому из предыдущих пунктов, отличающийся тем, что блок (1) отслеживания выполнен с возможностью буксировки на тросе, образующем бесконечный ремень, протянутый между ведомым шкивом и ведущим шкивом, соединенным со съемным средством приведения во вращение.
| WO 2017141155 A1, 24.08.2017 | |||
| EP 3066916 A1, 04.09.2016 | |||
| АГРЕГАТ ДЛЯ УБОРКИ НАВОЗА И РАСПРЕДЕЛЕНИЯ ПОДСТИЛКИ | 2014 |
|
RU2581234C1 |
