xj
XI К 00 00 СП
Изобретение относится к электротехнике и может быть использовано в системах электропривода с вентильным и шаговым электродвигателями.
Известно устройство управления бесщеточного двигателя постоянного тока с использованием ПЗУ (см. патент США М 4270074, кл. И 02 Р 6/02, 1985 г.), содержащего статор, в обмотки которого включены датчики положения оси двигателя, соединенные со входом схемы регулирования скорости, генерирующей цифровой сигнал. Схема возбуждения двигателя содержит постоянное запоминающее устройство, входы которого соединены с выходом схемы регулирования скорости.
Недостатком описанною устройства является низкая точность управления.
Известен вентильный электропривод (см. а.с. СССР № 1552329, МКИ 5 Н 02 Р 6/02, 1988 г.), содержащий синхронный электродвигатель, обмотки которого подключены к выходам регулятора тока, датчик положения ротора, механически связанный с ротором синхронного электродвигателя, выходы которого подключены к первым входам первого постоянною запоминающего устройства (ПЗУ), вторые входы которого подключены к выходам задатчикэ частоты вращения, второе ПЗУ, генератор и двоичный счетчик, тактовый вход которого подключен к выходу генератора, а выходы подключены к входам второго ПЗУ, выходы которого подключены к третьим входам первого ПЗУ, а выход старшего разряда подключен к входу обнуления двоичного счетчика. Выходы первого ПЗУ подключены ко входом регулятора тока.
Недостатком описанного устройства является низкое быстродействие, которое обусловлено большим периодом опроса ПЗУ, так как число требуемых для опроса тактовых импульсов равно числу передаваемых значений тока.
Другим недостатком является низкая точность, поскольку при заданном быстродействии и числе передаваемых значений тока приходится выбирать высокую частоту тактовых импульсов, что приводит к нелинейным искажениям при преобразовании кода в ток.
Целью изобретения является повышь- ние точности управления и быстродействия.
Пос1авленная цель достигается тем, что о вентильный электропривод, содержащий синхронный двигатель с m-фазной якорной обмоткой, подключенной к выходам регулятора тока, датчик положения ротора синхронного двигателя, генератор импульсов, выходом соединенный с тактовым входом
двоичного счетчика, выходы которого подключены к входам первого постоянного запоминающего устройства, один из выходов которого соединен с входом сброса счетчика, а другие выходы - с первой группой входов второго ПЗУ, вторая и третья группа входов которого подключены, соответственно, к выходам задатчика частоты вращения и датчика положения ротора, введены m
двухвходовых сумматора, каждый из которых одним входом соединен с выходом младшего разряда второго ПЗУ, а вторым - с выходом старшего разряда указанного ПЗУ, выходы сумматоров соединены с соответствующими входами регулятора тока, причем каждый сумматор выполнен с коэффициентом усиления по его входам, удовлетворяющим соотношению
20
К Ki
„ г
где Ki, 2 - коэффициенты усиления сумматора по первому и второму входам соответственно:
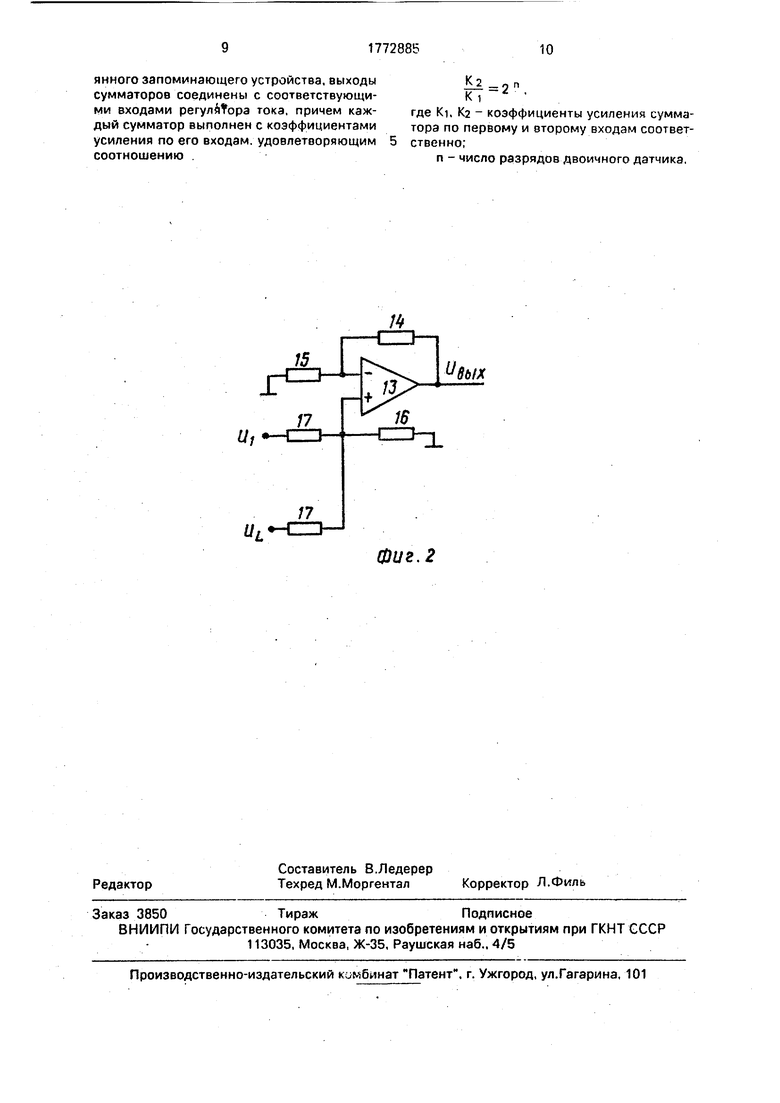
п - число разрядов двоичного счетчика. Сущность изобретения поясняется чертежом, где на фиг 1 изображена схема электропривода, на фиг. 2 схема сумматора.
Вентильный электропривод содержит (см. фиг. 1) синхронный электродвигатель 1 с m-фазной якорной обмоткой, подключенной к выходам регулятора 2 тока, датчик 3 положения ротора синхронного двигателя
1, первое постоянное запоминающее устройство 4 (ПЗУ 4), задатчик 5 частоты враще- ния, m двухвходооых сумматоров Б---9, второй ПЗУ 10, двоичный счетчик 11 и генератор 12 импульсов.
Генератор 12 импульсов выходом соединен с тактовым входом двоичного счетчика 11, выходы которого подключены к входам первого ПЗУ 4, один из выходов которого соединен с входом сброса счетчика,
а другие выходы - с первой группой входов второго ПЗУ 10, вторая и третья группы RXO- дов которого подключены, соответственно, к выходам задатчика 5 частоты вращения и датчика 3 положения роторз синхронного
двигателя 1. Каждый из m двухвходовых сумматоров 6-9 одним входом соединен с выходом младшего разряда второго ПЗУ 10, а вторым - с выходом старшего разряда указанного ПЗУ 10. Выходы сумматоров G-9
соединены с соответствующими входами регулятора 2 тока.
Сумматор 6-9 (см, фиг, 2) выполнен, например, по схеме (см, Л.Фолкенберри Применение операционных усилителей и
линейных ИС, М., Мир, 1985, стр. 113, рис. 5.5) и содержит операционный усилитель 13 и четыре резистора 14-17.
Каждый сумматор 6-9 выполнен с коэффициентом усиления по его входам, удовлетворяющим соотношение
Ki
где Ki, K2 - коэффициенты усиления сумматора по первому и второму входам, соответственно;
п - число разрядов двоичного счетчика.
Работает устройство следующим образом.
С генератора 12 высокочастотные импульсы поступают на тактовый вход двоичного счетчика 11. Счетчик 11 считает импульсы и последовательно опрашивает ячейки памяти второго ПЗУ 10. Если счетчик 11, например, четырехразрядный п 4, то второе ПЗУ 10 имеет три выхода (1 + Iog24). По первому адресу записаны нули (000) или О в шестнадцатиричном коде, во втором и третьем адресах записаны 1 (100), в следующих четырех адресах записаны 2 (010). Далее число 3 (110) записано в восьми адресах. В последнем шестнадцатом адресе записана цифра 4 (001), что означает появление единицы на третьем выходе ПЗУ 10 и сброс счетчика 11. Если число п выходов двоичного счетчика 11 больше четырех, то опрос ячеек памяти ПЗУ 10 продолжается и под каждую последующую цифру предусмотрено в два раза больше адресов, чем под предыдущую. После сброса счетчика 11 процесс опроса ячеек памяти повторяется снова.
Поскольку выходы второго ПЗУ 10 соединены с вторыми входами первого ПЗУ 4, то к выходам последнего будут поочередно подключаться ячейки памяти. При этом первые ячейки памяти будут подключены в течение одного тактового интервала(число О во втором ПЗУ 10 записано в одном адресе), вторые ячейки - в течение двух тактовых интервалов (число 1 во втором ПЗУ 10 записано в двух адресах), третьи ячейки памяти - в течение четырех тактовых интервалов (число 2 во втором ПЗУ 10 записано в четырех адресах), далее четвертые ячейки памяти будут подключены в течение восьми тактовых интервалов.
В общем случае 1-е ячейки будут подключены к выходам в течение 2 тактовых интервалов, поскольку число I записано во втором ПЗУ 10 в 21 адресах
Значение разрядов требуемых функций тока для каждой фазы электродвигателя 1, записанные в первом ПЗУ 4 появляются поочередно одновременно на 1 ее выходах. Для этого предвари(ельно значение функции тока разбегается на L равных по длине участков Например, при L 2 восьмиразрядная функция разбивается на два четырехразрядных участка, в одном из них
четыре старших разряда, в другом четыре младших и таким образом функция записывается в первом ПЗУ 4, причем соответствующие разряды обоих участков записываются походному и тому же адресу,
Так при наличии О на выходе второго ПЗУ 10 на одном выходе перзого ПЗУ 4 будет первый разряд Функции тока (самый старший) - он поступит на вход сумматора, (например, 6) с большим коэффициентом
усиления, на другом входе будет пятый разряд этой функции - он поступит на второй вход сумматора 6 коэффициент усиления которого в 16 раз меньше (в общем случае в 2П раз). Число 16 является соотношением
между весами первого и пятого разрядов. Когда на выходе второго ПЗУ 10 появится число 1, к выходам ПЗУ 4 подключается втсоой и шестой разряды функции тока, и хотя веса разрядов уврличитись, соотис ие
ние весов разрядов осталось прежнее - шестнадцать. После появления на выходе второго ПЗУ 10 числа 2 к выходам перпою ПЗУ 4 подключается третий и седьмой разряды функции тока, а после появления числа
3 - четвертый и восьмой разряды. Во всех случаях соотношение между весами разрядов равно шестнадцати и более старший разряд поступает на тот вход сумматора, коэффициент усиления по которому в шестнадцать раз больше. Время выдержки при переходе от младших разрядов функции тока к более старшим всякий раз удваивается. Сумматор работает следующим образом.
Напряжение на выходе операционного усилителя 13 равно
U
оых
Ui
R16
ГРИГУ
0 ...R16
+LJL (R17)L;
+ U2
R16 (R17)2
+ ...
CO
(см, Л.Фолкенберри Применение операционных усилителей и линейных И.С., М., Мир. 1985. стр. 110-113).
Принимает значение резистора (R17)i за R, тогда значение резистора R16 будет равно Ку R, где Ку - коэффициент усиления сумматора по первому входу (самому старшему). Коэффициент усиления по второму входу должен быть в 2П раз меньше, чем по первому, поэтому принимаем значение резистора (R17)a 2nR, значение резистора (R17)i будет равно 2(L-1)nR.
Подставив в формулу (1) найденные значения резисторов, получим:
tWSu u +
иг
/ иг (
ь
1-0 /
(г)
a Рт2ь- jH.Для того, чтобы схема была сбалансированной, необходимо чтобы сумма коэффициентов усиления неинвертируемой части схемы (куда подаются напряжения Ui, tte, ... UL) была равна сумме коэффициентов усиления инвертируемой части, Для выполнения этого должно соблюдаться условие
R16R16 , , R16
l f f. лГ -т Т
R14
R15 (R17)1 TR17J2
(НТТУ
(3)
Приняв, значение сопротивлеиил резистора 14 за R, тогда сопротивление резистора 15 равно
R
Ку (1+4г + l
У V 2П2 (L - 1 )
,г)
(4
Другими словами, требуемые функции токов записанные в ПЗУ Л разделяются в начале на составные части, которые затем преобразуются в аналоговые величины и суммируются в сумматорах 6-9, причем каждая со своим весовым коэффициентом, поэтому на их выходах получаются исходные функции в аналоговом виде.
Таким образом, усредненное напряжение сумматоров 6-9 пропорционально требуемой функции тока, записанной в двоичном коде в первом ПЗУ 4 для соответствующей фазы синхронного электродвигателя 1. На выходах остальных сумматоров 7, 8, 9 формируются напряжения, пропорциональные требуемым гокам в остальных фазах синхронного электродвигателя 1. Регулятор 2 токов преобразует значение напряжений на выходах сумматоров 6-9 в токи, протекающие в фазах синхронного электродвигателя 1.
Задатчик 5 скорости задает требуемые направление вращения и скорость для электродвигателя 1. Если на всех выходах задат- чика 5 скорости присутствуют нули {задаваемая скорость равна нулю), то в том массиве памяти первого ПЗУ 4, который со
ответствует такому сочетанию его третьих входов, во всех ячейках будут записаны нули. При этом токи в фазах электродвигателя 1 равны нулю и его ротор стоит неподвижно.
5 При поступлении с задатчика 5 скорости кода отличного от нуля к выходам первого ПЗУ подключаются те массивы памяти, в которых записаны функции токов соответствующие заданной скорости. При этом токи
10 в фаоах электродвигателя 1 формируются таким образом, чтобы вектор магнитодвижущей силы (МДС) статора был перпендикулярен вектору МДС ротора. Положение вектора МДС статора определяется соотно15 шением токов в фазах электродвигателя 1, а информация о положении роюра снимается с ДПРЗ в двоичном коде Рогор элекфо- двигателя 1 начинает вращаться. При изменении положения ротора изменяется и
20 состояние выходов ДПРЗ. Массивы памяти в первом ПЗУ 4 переключаются таким образом, что вектор МДС статра, не изменяя своей величины, изменяет свое положение, оставаясь перпендикулярным вектору МДС
25 рогора, При этом достигаются максимальный момент и КПД.
Предположим Тэ 1 мс, допустим также чю для обеспечения требуемой точности характеристики код/ток, период тактовой ча30 стоты должен в 4 раза превышать Тэ или Ттч S 4ТЭ, то: да при М 256 для прототипа период опроса составит приблизительно 1 с, для предлагаемого устройства при L 2 период опроса состоит 60 мс, а для 1 4
35 период опроса 12 мс. При этом следует отметить, что предлагаемое устройство не сложнее прототипа.
Формула изобретения Вентильный электропривод, содержа40 щий синхронный двигатель с пл-фазной якорной обмоткой, подключенной к выходам регулятора тока, датчик положения ротора синхронного двигателя, 1енерэтор импульсов, иыходом соединенный с такто45 вым входом двоичного счетчика, выходы которого подключены к входам первого постоянного запоминающего устройства, один из выходов которого соединен с входом сброса счетчика, а другие выходы - с
50 первой группой входов второго постоянного запоминающего устройства, вторая и третья группы входов которого подключены соответственно к выходам задатчика частоты вращения и датчика положения ротора, о т55 л и ч а ю щ и и с я тем, что, с целью повышения точности управления и быстродействия, введены m двухоходовых сумматора, каждый из которых первым входом соединен с выходом младшею разряда, а вторым - с выходом старшего разряда второго постоянного запоминающего устройства, выходы сумматоров соединены с соответствующими входами регул тЪра тока, причем каждый сумматор выполнен с коэффициентами усиления по его входам, удовлетворяющим соотношению
Ki
где Ki. «2 - коэффициенты усиления сумматора по первому и второму входам соответственно;
п - число разрядов двоичного датчика,

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1988 |
|
SU1552329A1 |
| Многоканальное устройство для измерения температуры | 1990 |
|
SU1791731A1 |
| Устройство для получения аналоговых функций | 1988 |
|
SU1644369A1 |
| Цифровой генератор функций | 1986 |
|
SU1324092A1 |
| Устройство для регенерации динамической памяти | 1986 |
|
SU1418809A1 |
| Функциональный генератор | 1987 |
|
SU1469509A1 |
| Генератор псевдослучайных сигналов | 1987 |
|
SU1437974A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1751837A1 |
| Цифровой компандер | 1986 |
|
SU1427575A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ МАГНИТОТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2090217C1 |
Использование: в системах с Езентиль- ным и шаговым электродвигателями. Сущность - вентильный электропривод содержит синхронный электродвигатель 1 с т-фэзной якорной обмоткой, регулятор 2 тока, датчик 3 положения ротора, первое постоянное запоминающее устройство 4, задатчик 5 частоты вращения, m двухвходо- вых сумматоров 6-9, второе постоянное запоминающее устройство 10, двоичный счетчик 11 и генератор 12 импульсов. Каждый сумматор содержит операционный усилитель, четыре резистора и выполнен с коэффициентом усиления по его входам, удовлетворяющим соотношению Кз/Ki -2п, где Ki и К2 - коэффициенты усиления суммй- торэ по первому и второму входам; п - число разрядов двоичного счетчика. 2 ил.
Фиг.2
| Патент США № 4270074,кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электропривод | 1988 |
|
SU1552329A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
