Изобретение относится к электротехнике и может быть использовано в системах электропривода с вентильными и шаговыми электродвигателями.
Цель изобретения - упрощение конструкции.
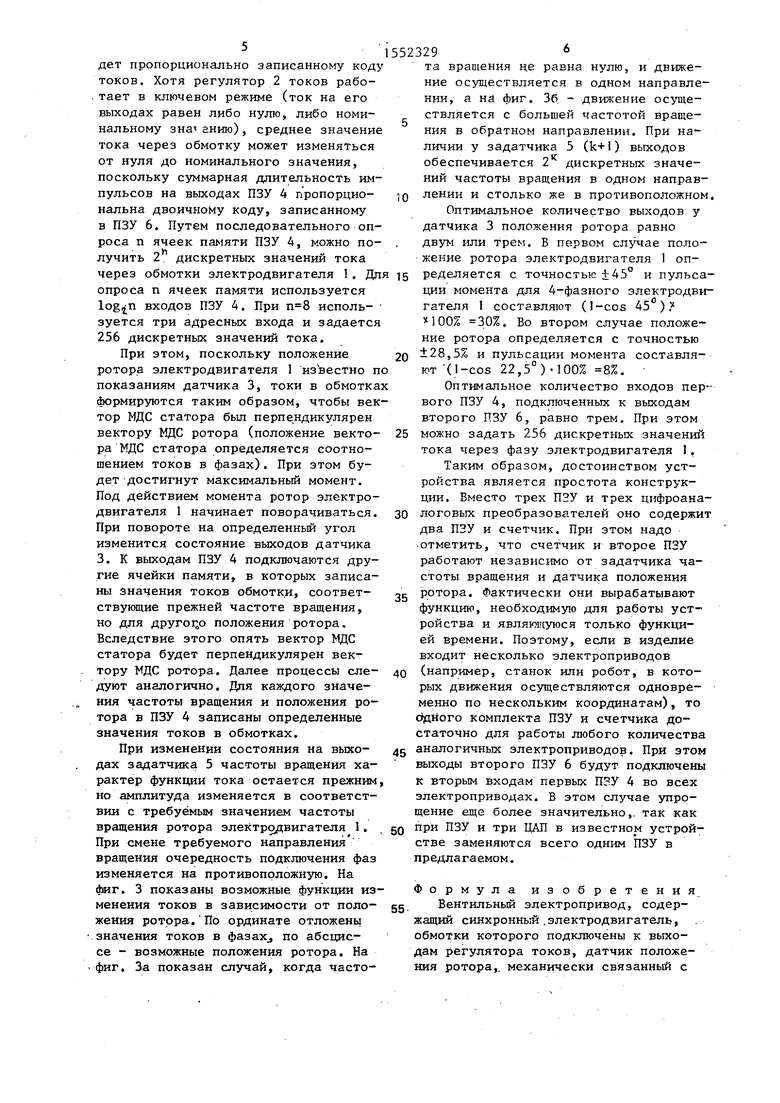
На фиг. 1 изображена функциональная схема электропривода; на фиг.2 - таблица прожига второго постоянного запоминакчцего устройства; на фиг.З - диаграммы работы регулятора токов.
Вентильный электропривод содержит синхронный электродвигатель 1, обмотки которого подключены к выходам регулятора 2 токов, датчик 3 положения ротора, механически связанный с ротором синхронного электродвигателя 1. Выходы датчика 3 положения ротора подключены к первой группе входов первого постоянного запоминающего устройства А, вторая группа входов которого подключена к выходам задатчика 5 частоты вращения. Электропривод содержит также второе постоянное запоминающее устройство 6. Дополнительно вентильный электропривод содержит двоичный счетчик 7 и генератор 8.
Тактовый вход счетчика 7 подключен к выходу генератора 8, а выходы подключены к входам второго постоянного запоминающего устройства 6, выходы которого подключены к третьей группе входов первого постоянного устройства А. Выход старшего разряда второго постоянного устройства 6 подключен к входу обнуления счетчика 7. Выходы первого постоянного запоминающего устройства (ПЗУ) А подключены к входам регулятора 2 токов.
Задатчик 5 частоты вращения может быть выполнен на основе узла сравнения, аналого-цифрового преобразователя и тахогенератора, механически связанного с ротором (на фиг. 1 показано пунктиром).
Вентильный электропривод работает следующим образом.
С генератора 8 высокочастотные импульсы поступают на тактовый вход счетчика 7.-Счетчик 7 считает импульсы и последовательно опрашивает ячейки памяти второго ПЗУ 6. Если счетчи 7, например, восьмиразрядный (), то второе ПЗУ 6 имеет четыре выхода и в нем записана следующая информация (фиг. 2): полпервому адресу записаны О (0000) или О в шестнадца
5
0
5
0
5
0
5
0
5
тиричном коде, во втором и третьем адресах записаны 1 (1000), в следующих четырех адресах записаны 2 (0100). Далее число 3 (1100) записано в восьми ячейках, число А (0010) - в 16, число 5 (1010) в 32, число 6 (ОНО) в 6А, число 7 (1110) в 128 ячейках. Число О (0001) записано в последней ячейке. Числу 8 соответствует появление I в старшем четвертом разряде, который соединен с входом обнуления счетчика 7. Счетчик 7 сбрасывается на О, затем опрос ячеек памяти повторяется снова.
Поскольку выходы второго ПЗУ 6 соединены с третьей группой входов первого ПЗУ А, то к выходам последнего будут поочередно подключаться ячейки памяти. При этом первые ячейки памяти будут подключены в течение одного тактового интервала (число О во втором ПЗУ 6 записано в одной ячейке), вторые ячейки - в течение двух тактовых интервалов (число 1 во втором ПЗУ 6 записано в двух
ячейках памяти), третьи ячейки памяти - в течение четырех тактовых интервалов (число 2 во втором ПЗУ 6 записано в четырех ячейках памяти), i-e ячейки будут подключены в течение 2 тактовых интервалов (число во втором ПЗУ записано в 2 ячейках памяти) .
Если на всех выходах задатчика 5 частоты вращения присутствуют О (задаваемая скорость равна О), то в том массиве памяти ПЗУ А, который соответствует такому сочетанию его вторых входов, во всех ячейках будут записаны О. При этом токи в фазах электродвигателя 1 равны нулю, он неподвижен.
Предположим, что с задатчика 5 частоты вращения поступил код, соответствующий какому-либо определенному моменту на валу двигателя. Предварительно в ячейки памяти первого ПЗУ А по соответственным адресам были записаны коды требуемых значений тока, протекающих через обмотки для создания заданного момента, Поскольку время опроса каждой ячейки памяти ПЗУ А пропорционально весу записанного в ней разряда, то на каждом выходе ПЗУ А будет последовательность импульсов, при этом отношение суммарной длительности импульсов к периоду опроса бу
дет пропорционально записанному коду токов. Хотя регулятор 2 токов работает в ключевом режиме (ток на его выходах равен либо нулю, либо номинальному зна гнию), среднее значение тока через обмотку может изменяться от нуля до номинального значения, поскольку суммарная длительность импульсов на выходах ПЗУ 4 пропорциональна двоичному коду, записанному в ПЗУ 6. Путем последовательного опроса п ячеек памяти ПЗУ 4, можно получить 2h дискретных значений тока через обмотки электродвигателя . Дл опроса п ячеек памяти используется logtn входов ПЗУ 4. При используется три адресных входа и задается 256 дискретных значений тока.
При этом, поскольку положение ротора электродвигателя 1 известно п показаниям датчика 3, токи в обмотка Лорнируются таким образом, чтобы вектор НДС статора был перпендикулярен вектору НДС ротора (положение вектора МДС статора определяется соотношением токов в фазах). При этом будет достигнут максимальный момент. Под действием момента ротор электродвигателя 1 начинает поворачиваться. При повороте на определенный угол изменится состояние выходов датчика 3. К выходам ПЗУ 4 подключаются другие ячейки памяти, в которых записаны значения токов обмотки, соответствующие прежней частоте вращения, но для другого положения ротора. Вследствие этого опять вектор МДС статора будет перпендикулярен вектору МДС ротора. Далее процессы следуют аналогично. Для каждого значения частоты вращения и положения ротора в ПЗУ 4 записаны определенные значения токов в обмотках.
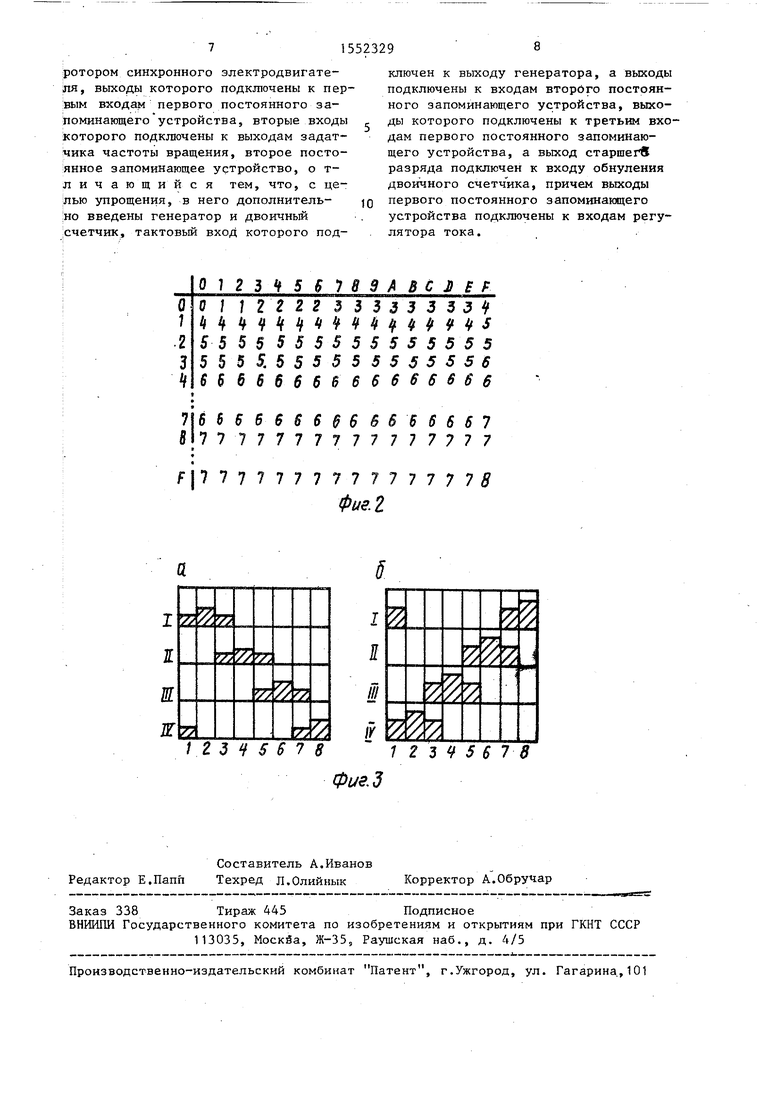
При изменении состояния на выходах эадатчика 5 частоты вращения характер функции тока остается прежним но амплитуда изменяется в соответствии с требуемым значением частоты вращения ротора электродвигателя 1. При смене требуемого направления вращения очередность подключения фаз изменяется на противоположную. На фиг. 3 показаны возможные функции изменения токов в зависимости от положения ротора. По ординате отложены значения токов в фазах по абсциссе - возможные положения ротора. На фиг. За показан случай, когда часто523296
та вращения не равна нулю, и движение осуществляется в одном направлении, а на Фиг. Зб - движение осуществляется с большей часто оп вращения в обратном направлении. При наличии у задатчика 5 (k+1) выходов обеспечивается 2 дискретных значений частоты вращения в одном направ- Ю лении и столько же в противоположном.
Оптимальное количество выходов у датчика 3 положения ротора равно двум или трем. В первом случае понижение ротора электродвигателя 1 оп- 15 ределяется с точносты +45° и пульсации момента для 4-фаэного элехтродьи- гателя 1 составляют (1-cos 45 ) 100% 30%. Во втором случае положе- ние ротора определяется с точностью о 128,5% и пульсации момента составляют (1-cos 22,5°)-100% 8%.
Оптимальное количество входов пер вого ПЗУ 4, подключенных к выходам второго ПЗУ 6, равно трем. При этом 5 можно задать 256 дискретных значений тока через фазу электродвигателя 1. Таким образом, достоинством устройства является простота конструкции. Вместо трех ПЗУ и трех цифроана- 0 лотовых преобразователей оно содержит два ПЗУ и счетчик. При этом надо отметить, что счетчик и второе ПЗУ работают независимо от задатчика частоты вращения и датчика положения 5 ротора, тактически они вырабатывают функцию, необходимую для работы устройства и являющуюся только функцией времени. Поэтому, если в изделие входит несколько электроприводов 0 (например, станок или робот, в которых движения осуществляются одновременно по нескольким координатам), то одного комплекта ПЗУ и счетчика достаточно для работы любого количества 5 аналогичных электроприводов. При этом выходы второго ПЗУ 6 будут подключены к вторым входам первых 4 во всех электроприводах. В этом случае упрощение еще более значительно, так как 0 при ПЗУ и три ЦАП в известном устройстве заменяются всего одним ПЗУ в предлагаемом.
Формула изобретения 5 Вентильный электропривод, содержащий синхронный электродвигатель, обмотки которого подключены к выходам регулятора токов, датчик положения ротора, механически связанный с
ротором синхронного электродвигателя, выходы которого подключены к первым входам первого постоянного запоминающего устройства, вторые входы которого подключены к выходам задат- чика частоты вращения, второе постоянное запоминающее устройство, о т- личающийся тем, что, с целью упрощения, в него дополнительно введены генератор и двоичный счетчик, тактовый вход которого под
ключей к выходу генератора, а выходы подключены к входам второго постоянного запоминающего устройства, выходы которого подключены к третьим входам первого постоянного запоминающего устройства, а выход старшеГв разряда подключен к входу обнуления двоичного счетчика, причем выходы первого постоянного запоминающего устройства подключены к входам регулятора тока.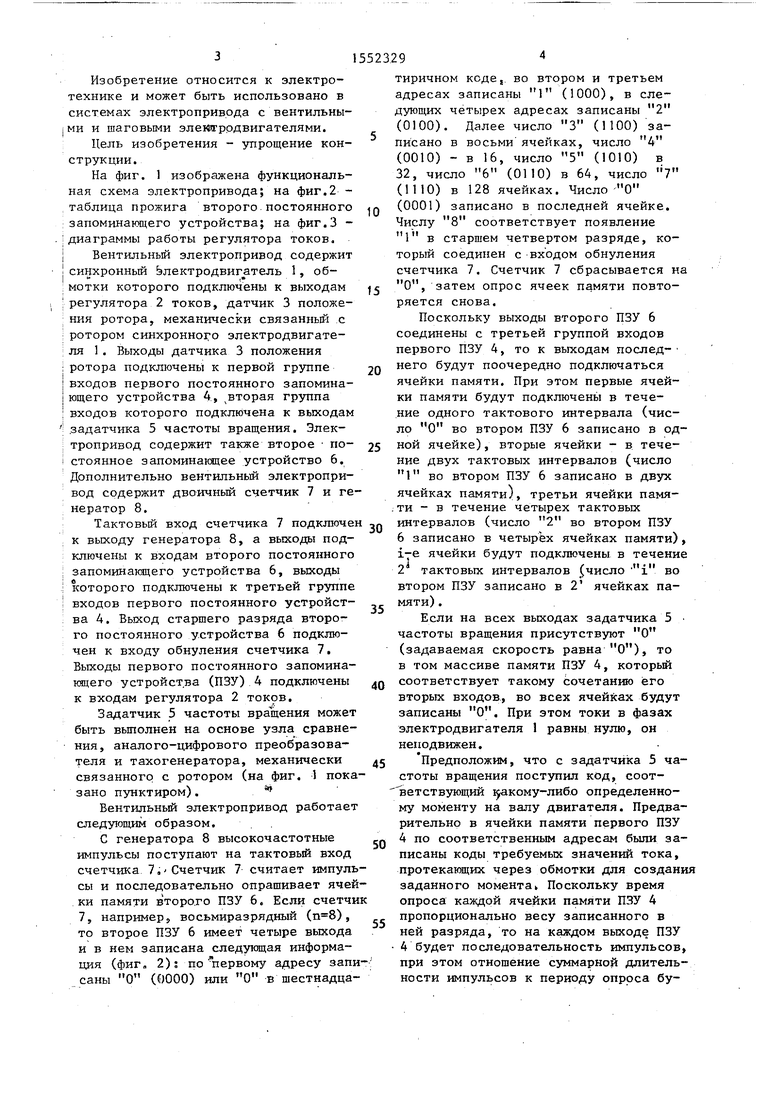
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1990 |
|
SU1772885A1 |
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| Устройство для управления @ -фазным шаговым двигателем с дроблением шага | 1986 |
|
SU1372589A1 |
| Устройство для получения аналоговых функций | 1988 |
|
SU1644369A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Вентильный электропривод | 1985 |
|
SU1309242A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ИМПЛАНТИРУЕМОГО РОТАЦИОННОГО ЭЛЕКТРОНАСОСА КАРДИОПРОТЕЗА С ОБЕСПЕЧЕНИЕМ СВОЙСТВА ЖИВУЧЕСТИ (ВАРИАНТЫ) | 2013 |
|
RU2525300C1 |
| Регулятор частоты для асинхронного тягового электропривода | 1982 |
|
SU1026275A1 |
| Способ управления вентильным электродвигателем постоянного тока | 1989 |
|
SU1757040A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
Изобретение относится к электротехнике. Целью изобретения является упрощение. Вентильный электропривод содержит синхронный электродвигатель, регулятор токов, датчик положения ротора, выходы которого подключены к первым входам первого постоянного запоминающего устройства (ПЗУ), вторые входы которого подключены к выходам задатчика частоты вращения, второе ПЗУ, выходы которого подключены к третьим входам первого ПЗУ, а входы-к двоичному счетчику, связанному с генератором, причем выход первого ПЗУ подключен к регулятору токов. В процессе счета импульсов на выходе второго ПЗУ 6 периодически появляется код числа, причем временная длительность наличия на выходе кода N-го числа пропорциональна 2. Эти коды определяют время подключения соответствующих ячеек памяти первого ПЗУ 4 к его выходу, чем обеспечивается модуляция сигнала на входе регулятора 2 токов. На выходе ПЗУ 4 формируется позиционный сигнал управления со скважностью, задаваемой задатчиком 5 частоты вращения. 3 ил.
666666666666667 777777777777777
777777777777770
фие.2
1 Z 3 Ч 5 6 7 в
| Вентильный электропривод | 1983 |
|
SU1244779A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электропривод | 1985 |
|
SU1249684A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электропривод | 1985 |
|
SU1324088A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
