фиг.1
кас, включающий основание 1, стойки 2 и 3 и две перемычки. На каркасе при помощи шарниров б закреплены рычаги 7 и 8, являющиеся продольными звеньями паралле- лограммных механизмов, На свободных концах рычагов 7 и 8 при помощи шарниров 9 и 10 со стороны расположения животного закреплена рама 11, а с противоположной перемычки 12, являющиеся вертикальными звеньями указанных параллелограммных механизмов. Загружаемый в кормушку корм через раму 11, шарниры 9, рычаги 7 и 8, опирающи$ся при помощи шарниров б на каркас, шарниры 10 и перемычки .воздействует на силоизмерительные датчики 14. 13 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кормления животных | 1989 |
|
SU1727737A1 |
| Устройство для кормления животных | 1989 |
|
SU1782494A1 |
| Селекционная кормушка | 1989 |
|
SU1773353A1 |
| Кормушка для животных | 1988 |
|
SU1667765A1 |
| Кормушка | 1988 |
|
SU1657134A1 |
| УСТРОЙСТВО ДЛЯ СОДЕРЖАНИЯ ЖИВОТНЫХ | 2006 |
|
RU2331190C1 |
| Устройство для раздачи текучих кормов | 1991 |
|
SU1836903A1 |
| Кормораздатчик | 1980 |
|
SU1005739A1 |
| КЛЕТОЧНАЯ БАТАРЕЯ ДЛЯ СОДЕРЖАНИЯ ПТИЦЫ | 1991 |
|
RU2021715C1 |
| Раздатчик-смеситель кормов | 1990 |
|
SU1711747A1 |



Изобретение относится к сельскому хозяйству, в частности к устройствам для кормления животных в селекционных центрах и вивариях НИИ животноводства Цель изобретения - повышение точности измерения массы корма и снятие нагрузки с силоизме- рительных датчиков во время потребления корма животным. Кормушка содержит кар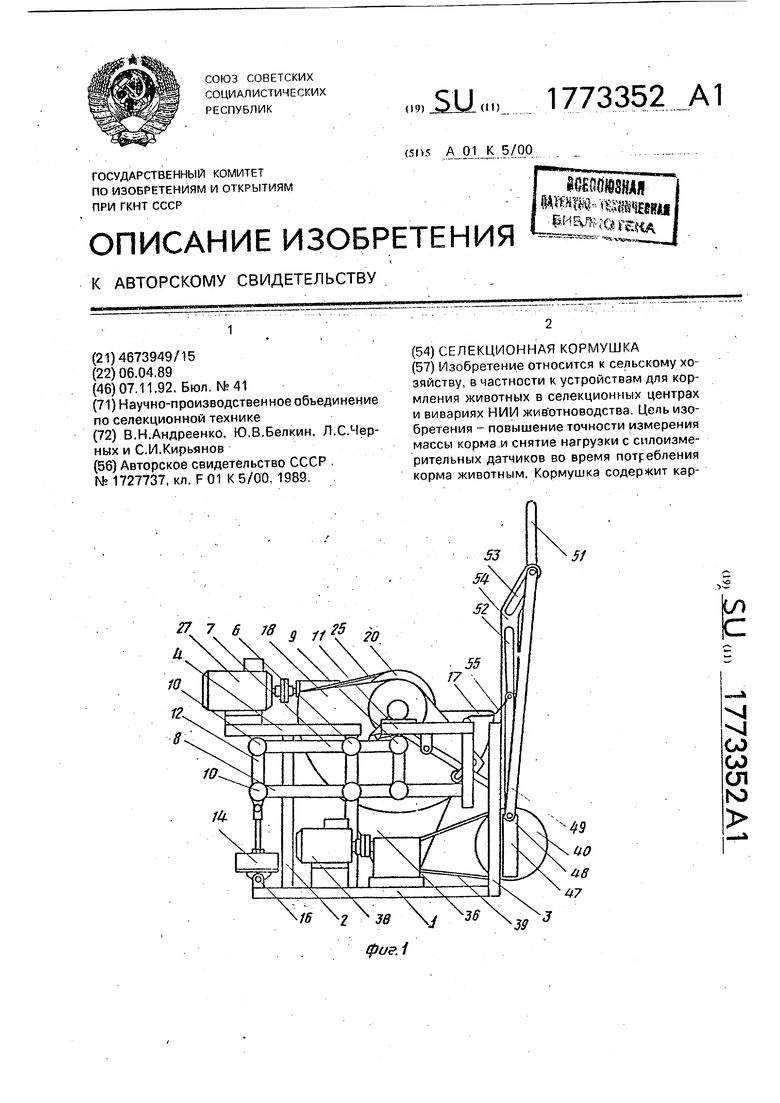
Изобретение относится к сельскому хозяйству, в частности к устройствам для кор- мления животных, содержащихся в селекционных центрах и вивдриях НИИ животноводства, опытных станций и сельскохозяйственных вузов.
Цель изобретения - повышение точности измерения массы корма и снятие нагрузки с силоизмерительных датчиков во время потребления корма животным,
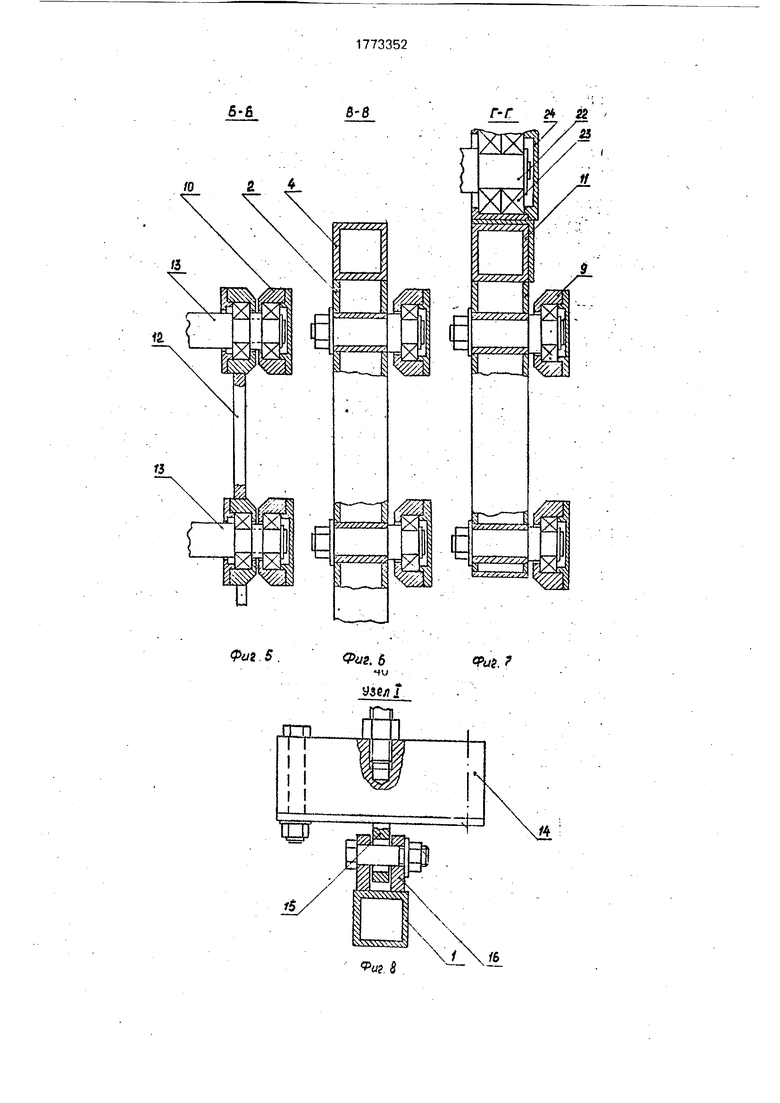
На фиг. 1 изображена селекционная кормушка в положении взвешивания корма и обеспечения доступа животного к корму, вид сбоку; на фиг. 2 - то же, в положении выгрузки из желоба остатков корма и разгрузки силоизмерительных датчиков; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - кинематическая схема кормушки; на фиг. 5 - сечение Б-Б на фиг. 2; на фиг. 6 -.сечение В-В на фиг. 2; на фиг. 7 - сечение Г-Г на фиг 2; на фиг. 8 - узел I на фиг, 2 (силоизмерительный датчик разгружен); на фиг. 9 - то же (силоиз - мерительный датчик нагружен); на иг. 10 - узел П на фиг. 2 (повернуто); на фиг. 11 -узел III на фиг, 3; на фиг. 12 - узел IV на фиг. 3; на фиг. 13 - узел V на фиг. 3.
Селекционная кормушка содержит сварной каркас, состоящий из основания 1, стоек 2, 3 и перемычек 4. На каркасах при помощи шарниров 6, выполненных, например, в виде подшипниковых узлов, закреплены рычаги 7,8, являющиеся продольными звеньями параллелограммных механизмов. На свободных концах рычагов 7, 8 при помощи шарниров 9 и 10 со стороны расположения животного закреплена рама 11, а с противоположной стороны - перемычки 12, являющиеся вертикальными звеньями указанных параллелограммных механизмов. Между собой перемычки 12 соединены балками 13 для монтажа противовесов (нв показаны), а на выступающих за пределы шарниров концах перемычек 12 шарнирно подвешены силоизмерительные датчики 14, которые своими ушками 15 подвижно (с возможностью вертикального перемещения) соединены с кронштейнами 16 основания 1.
На раме 11 смонтирована кормушка, состоящая из концентрично расположенных один относительно другого желобов 17 и 18. Желоб 17 прикреплен к раме 11 жестко, а желоб 18 - с возможностью поворота относительно последней. Это достигается тем, что к боковинам желоба 18 жестко и соосно закреплены фланец 19 и шкив 20, в которые при помощи подшипников 21
вставлены оси 22. Противоположные концы осей 22 при помощи подшипников 23 закреплены в корпусах 24. Шкив 20 клиновыми ремнями 25 соединен с ведущим шкивом 26 привода 27,закрепленного на правой ,
перемычке 4. На выступающих в желоб 18 концах осей 22 жестко закреплен П-образ- ный скребок 28, предназначенный для очистки от остатков корма желоба 18. Второй П-образный скребок 29, предназначенный
для очистки желоба 17, прикреплен жестко к внутренним сторонам боковин желоба 18 и соосно со скребком 28. В зонах между корпусом 24 и фланцем 19 с одной стороны и вторым корпусом 24 и шкивом 20 с другой
стороны кормушки на осях 22 жестко закреплены кривошипы 30, которые при помощи шатунов 31 шарнирно соединены с коромыслами 32, Коромысла 32 установлены с возможностью поворота в вертмкальных плоскостях вокруг пальцев 33. Свободные концы коромысел 32 пропущены с зазором между роликами 34, свободно одетыми на оси 35, жестко и симметрично прикрепленные к наружным сторонам боковин желоба 18. Снизу и вдсль желоба 17 на основании 1 закреплен шнек 36, предназначенный для удаления остатков корма за пределы кормушки через выгрузное окно
38,установленным на основании 1. На наружной поверхности одного из ведомых звеньев обгонной муфты имеется кольцевая канавка (не показана), которая клиновым ремнем 39 связана с ведомым шкивом 40. насаженным на вал 41. Последний при помощи корпусов 42 {с подшипниками) прикреплен к кронштейнам 43 основания 1, На втором конце вала 41 насажен кривошип 44. При этом шкив 40 и кривошип 44 оснащены жестко закрепленными на одинаковом расстоянии от оси вращения пальцами 45, ко- торые шарнирно (с возможностью вращения вокруг пальцев) связаны с шатунами 46. К свободным концам пальцев 45 в направлении к оси вращения вала41 жестко прикреплены щечки 47 с пальцами 48 на их наружных сторонах. Последние шарнирно связаны с шатунами 49. Верхние голочки шатунов 46 и 49 шарнирно связаны с концами U-образных фиксирующих дуг 50 и 51 соответственно. В свою очередь дуги 50 и 51 при помощи жестко прикрепленных к ним ползунов установлены в пазах 52 и 53 вертикальных стоек 54, прикрепленных неподвижно к перемычке между стойками 3 перед желобом 17. К выступающим наружу за пределы стоек 54 концам дуги 50 прикреплены гибкие связи 55, свободные концы которых прикреплены к раме 11. Кроме того, селекционная кормушка оснащена датчиком положения животного, конечными вы- ключателями и пультом автоматического управления (не показаны).
Селекционная кормушка работает следующим образом.
Загрузка кормушки заданной дозой корма осуществляется тогда, когда желоб 18 расположен с перекрытием желоба 17, скребки 28 и 29 находятся в верхних зонах желобов 18 и 17 соответственно, а доступ животного в кормушку прегражден сведен- ными до положения I дугами 50 и 51. Загружаемый в кормушку корм через раму 11, шарниры 9, рычаги 7 и 8, опирающиеся при помощи шарниров 6 на каркас, шарниры 10 и перемычки 12 воздействует на силоизме- рительные датчики 14, которые в этом случае находятся в положении, изображенном на фиг. 9. По достижении в кормушке заданной дозы корма вторичные приборы (не показаны) силоизмерительных датчиков 14 дают команду на прекращение загрузки. После этого в заданное программой время включают привод 38 в направлении, чтобы его выходной вал вращался по часовой стрелке. При этом привод 38 через двойную обгонную муфту и клиновый ремень 39 поворачивает шкив 40, а вместе с ним и вал 41 с кривошипом 44 на 180° и останавливается. Это обеспечивает через пальцы 45 и 48, шатуны 46 и 49 разведение фиксирующих дуг 50 и 51 по пазам 52 и 53 стоек 54 в противоположные стороны и тем самым обеспечивает свободный доступ животного к корму. При вращении выходного вала привода 38 по часовой стрелке винт шнека 36
вращаться не будет, так как в этом случае двойная обгонная муфта не соединит его с приводом 38. Кроме того, при нахождении фиксирующей дуги 50 в положении I силоиз- мерительные датчики 14 будут нагружены После того как животное просунуло голову между разведенными лугами 50 и 51 и начало потреблять корм из кормушки, о чем сигнализирует датчик положения животного, вновь включается привод 38 в том же на правлении вращения и переводит дуги 50 и 51 в положение 111 фиксируя тем самым животное за шею возле кормушки.
При этом дуга 50 при помощи гибких связей 55 приподнимает раму 11 и переведет силоизмерительные датчики 14 в положение, представленное на фиг 8. В этом положении силоизмерительные датчики 14 разгружаются и не воспринимают динамические нагрузки, которые возникают при кормлении животного По окончании процесса кормления, о чем также сигнализирует датчик положения животного, вновь включают привод 38 в том же направлении вращения и переводят дуги в положение I, предоставляя животному возможность покинуть пределы кормушки. После удаления головы животного за пределы кормушки, осуществляют взвешивание оставшегося в кормушке корма и принимают решение оставлять его и подготовить кормушку для загрузки новой дозой корма. Реализация последнего решения осуществляется путем перевода дуги 50 и связанной с ней дуги 51 в положение II, а затем - реверсированием привода 28 и включением привода 27 по часовой стрелке. При этом привод 38 через двойную обгонную муфту приводит во вращение винт шнека 36, а привод 27 через шкив 26, клиновые ремни 25 и шкив 20 будет вращать желоб 18 по часовой стрелке до момента образования между желобами 17 и 18 щели, обеспечивающей полное удаление остатков корма в шнек 36. Активное удаление из желобов 17 и 18 остатков корма осуществляется под воздействием скребков 28 и 29, которые в этом случае движутся навстречу друг другу. Скребок 29 приводится в действие непосредственно желобом 18, так как он прикреплен к нему жестко. Скребок 28 тоже приводится в действие желобом 18, но только через оси 35, ролики 34, коромысла 32, шатуны 31, кривошипы 30 и оси 22 на концах которых он закреплен жестко. По окончании удаления остатков корма из кожуха шнека 36 через выгрузное окно 37 привод 38 отключают, а привод 27 реверсируют. Последний переводит желоб 18 и скребки 28 и 29 в исходное положение, производится взвешивание пустой кормушки, и
она готова для загрузки новой заданной дозы корма.
Формула изобретения Селекционная кормушка, содержащая каркас, кормовой желоб с установленным перед ним U-образным фиксатором головы животного, привод и силоизмерительные датчики, отличающаяся тем, что, с целью повышения точности измерения массы корма и снятия нагрузки с силоизмери- тельных датчиков во время потребления животным корма, кормовой желоб снабжен расположенными по его торцам паралле0
5
лограммными механизмами, на передних вертикальных звеньях которых он закреплен, продольные звенья этих механизмов шарнирно установлены на каркасе, задние вертикальные звенья шарнирно соединены с силоизмерительными датчиками, а U-об- разный фиксатор имеет гибкие связи, посредством которых он соединен с передними вертикальными звеньями упомянутых механизмов, причем соединение силоизмерительных датчиков с каркасом выполнено со свободным ходом, не превышающим величины свободного хода гибких связей до их натяжения.
Л
#
WutZ
иг
к
№W
w
29еСШ
i
Ос,
i.
/
к
/
i
У
i«
9
S ,
г с t
хмж
о
1
Оа
-J
--J со со ел ю
I
JOL
ft ъ es
f
. u
I Ifttft
CSCEiil
(owfot&gouj jrwffl
6
. u
Узе/
S
узел у
55
| Устройство для кормления животных | 1989 |
|
SU1727737A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
