Изобретение относится к сельскому хозяйству, к мелиорации и используется для полива с переменным расходом воды в борозды.
Целью изобретения является упрощение конструкции и повышение качества полива.
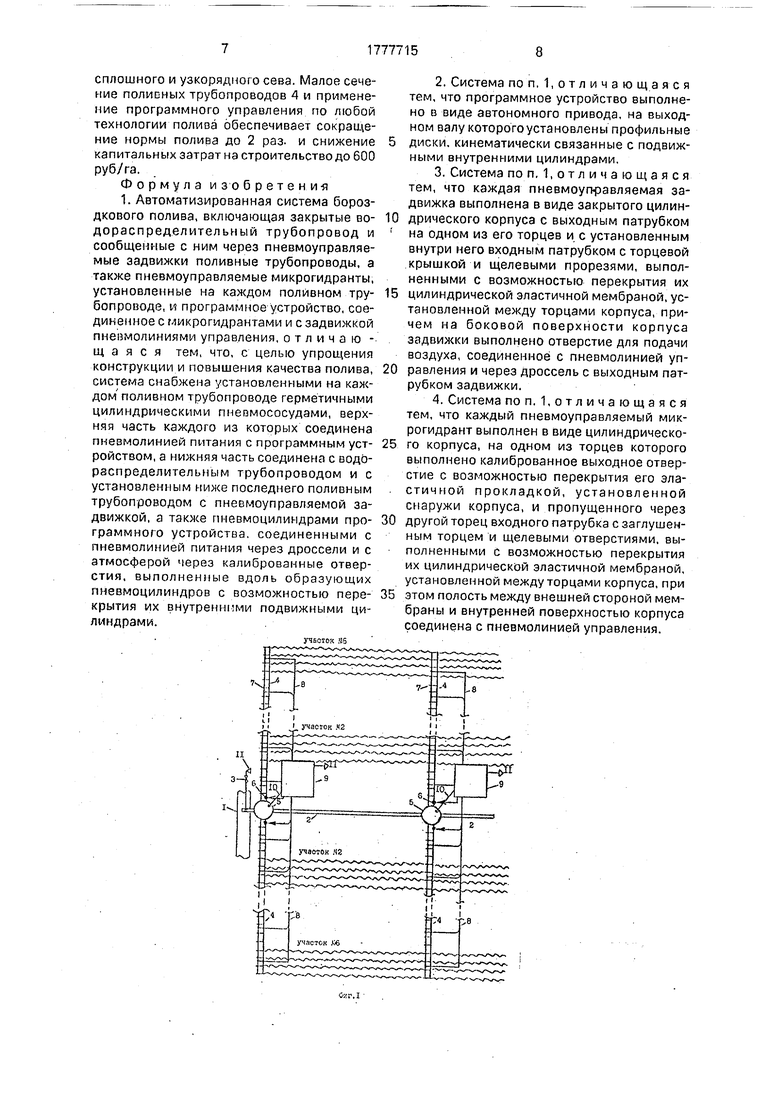
На фиг. 1 представлена схема автоматизированной системы бороздкового полива
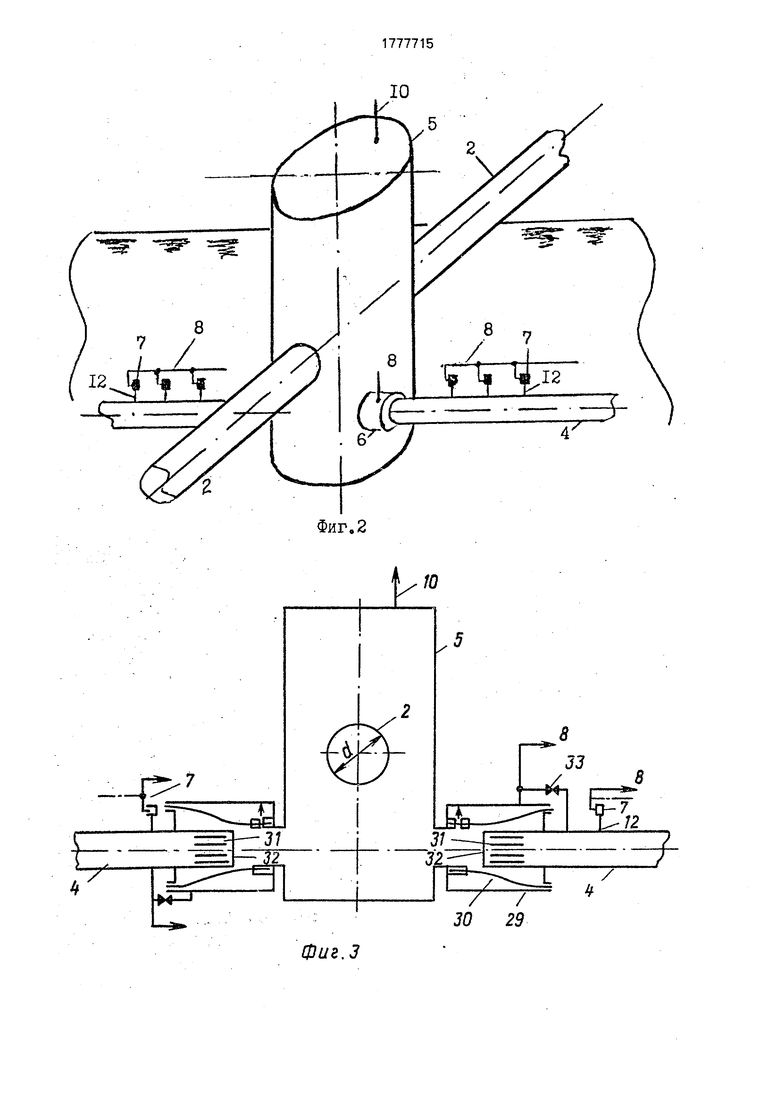
(для типового поливного модуля площадью до 100 га); на фиг. 2 - конструкция узла соединения распределительного и поливного трубопроводов в месте установки пнев- мососуда; на фиг. 3 - конструкция пневмососуда и соединения с ним задвижки, разрез; на фиг. 4- конструкция программного устройства; на фиг. 5 и 6 конструкции микрогидранта и задвижки, соответственно, разрез.
Автоматизированная система полиса (фиг. 1) содержит водозаборное устройство, например, лотковый ороситель 1 для подачи воды в закрытый водораспределительный трубопровод 2 с насадком Вентури на входе. Последний импульсной трубкой через управляемый вентиль 3 соединен с атмосферой для подачи воздуха в распределительный трубопровод 2, который может быть выполнен из асбоцементных труб диаметром 300-400 мм. На орошаемом поле через 300-400 м к трубопроводу 2 присоединены поливные трубопроводы 4 меньшего сечения (диаметром до 125 мм). Разветвление поливных трубопроводов 4 осуществляется в герметичном пневмососу- де 5 (фиг. 2, 3) с объемом до 100 л для накапливания воздуха. Подключение трубопровода 4 к сосуду 5 осуществляется через управляемую задвижку 6.
При прохождении смеси воздуха с водой по трубопроводу 2 более легкий воздух всегда скапливается на верхних изгибах трубопровода и тем более в сосуде,5, где скорость движения смеси уменьшается. При транзите этой смеси чере(з сосуд 5 в нижний трубопровод 2 воздух в промежуточные поливные трубопроводы 4, расположенные ниже трубопроводов 2, в основном не попадает.ч
На орошаемом поле площадью до 100 га поливные трубопроводы 4 длиной до 500 м прокладываются в 3-5 ярусов и разбиты на 6 участков полива с управляемыми микрогидрантами 7, которые через линии управления- 8 соединены с программным устройством 9. Устройство 9 через линию питания воздухом 10 сообщено с сосудом 5 и атмосферой 11. Микрогидранты 7 через подводящий патрубок 12 соединены с трубопроводом 10. Высота сосудов 19 должна обеспечивать попадание в линию 10 только воздуха, поэтому для обеспечения разделения воздуха и воды в сосудах 5 и удобства подключения трубопроводов 4, высота сосудов 5 от нижней до верхней крышки должна быть более 3d (d - диаметр трубопровода 2). Сосуд 5 должен быть выше трубопровода 2 на высоту n d. При настройке работы последнего трубопровода 4 вентилем 3 добиваются отсутствия воды в линии питания воздухом 10.
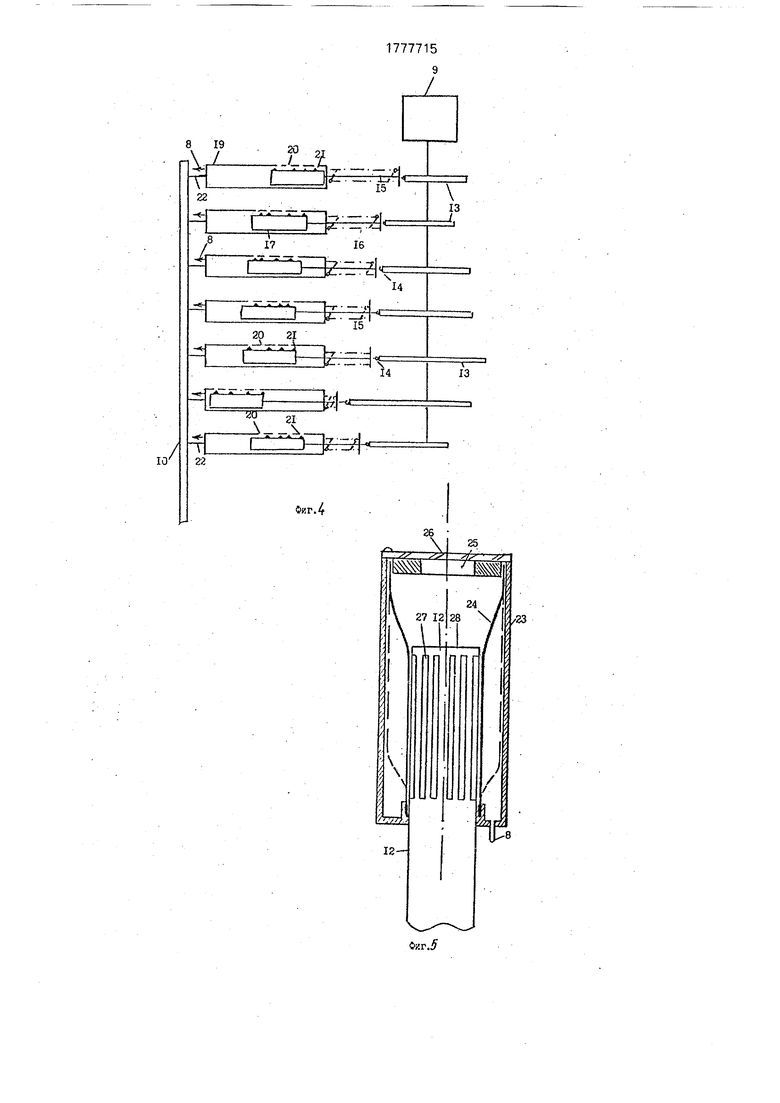
Программное устройство 9 (фиг. 4) имеет на выходном валу (скорость вращения 1 или 7 суток/оборот) профилированные программные диски 13, соединенные через роликовый подшипник 14, шток 15 с возвратной пружиной 16 полого поршня 17,
установленного в пневмоемкости 19, с калиброванными отверстиями 20, На поршне 17 расположены отверстия 21 в такой последовательности, которая обеспечивает при передвижении поршня 17 штоком 15 открытие одного (соответствующего работающему поливному трубопроводу) из калиброванных отверстий 20. При этом соединение устройств 9 с атмосферой осущест0 вляется через отверстия 20 (фиг. ,3), являющиеся составной частью устройства 9. Пневмоемкости 19 через дроссель 22 (калиброванная трубка) соединены с линией питания воздухом 10, а через линию управ5 ления 8 с полостью управления задвижкой 6 или микрогидрантами 7. Пружина 16 закреплена на корпусе программатора 9 и штоке 15 с возможностью постоянного контакта подшипника 14 с диском 13.
0 В качестве программного устройства 9 может быть использован микропроцессорный программно-управляемый регулятор Протар, з также локальные регуляторы с водяным, гидроприводом, механическим
5 или электроприводом. Например, может быть использован часовой привод 207 4П со скоростью 1 /2 об/ч, имеющий крутящий момент 147 мНм, продолжительность полного завода 96 или 24 ч, суточный разбаланс 0 180 с. При максимальном радиусе профильного программного диска 0,4 усилие для, перемещения поршня равно 35, 28 Н. Этого усилия достаточно для управления работой дисками 13 с заданием на профиле любой
5 программы полива.
Микрогидрант 7 (фиг. 5) состоит из патрубка 12 и цилиндрической обоймы 23 с запрессованной в нее эластичной цилиндрической мембраной 24, калиброванным от0 верстием 25 и обратным клапаном 26 из резиновой прокладки, закрепленной на шпильке.
Под мембраной 24 на патрубке 12 выполнены щели 27, площадь которых больше
5 проходного сечения патрубка 12 в 1,3-2 раза. Торец патрубка 12 заварен герметичной крышкой 28.
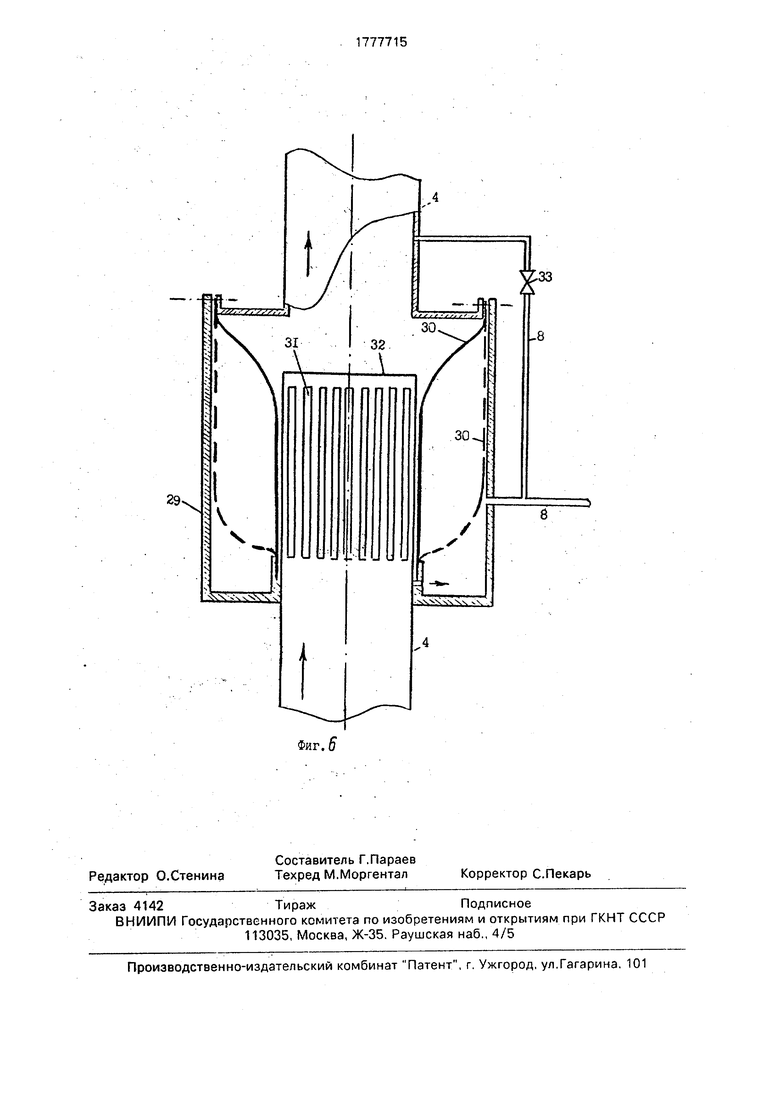
Управляемая задвижка 6(фиг, 6) состоит из двух коаксиальных труб 4 и 29 с соотноше0 нием диаметров не менее 1,4 для пропуска воды с минимальным гидросопротивлением. При этом Вход в задвижку 6 осуществляется по стрелке (фиг. 6) через нижний патрубок (фиг. 5). Каждая группа микрогидрантов 7 и
5 отдельные задвижки отдельными линиями 8 соединены с пневмоемкостями 19, количество которых равно количеству отдельных линий управления, например, 7, при параллельной работе секций левого и правого тру рпровода 4. В обойме трубы 29 закреплены
цилиндрическая мембрана 30 из эластичного материала. Под мембраной 30 на подводя щей трубе 4 выполнены щели 31, площадь которых больше проходного сечения трубы 4 в 1,1-2 раза. Торец подводящей трубы 4 заварен герметичной крышкой 32. Герметичная полость управления мембраны 30 через линию управления 8 соединена с программатором 9 или через переключатель управления (не показан на фиг. 6) и вентиль 33 с выходом задвижки. Мембраны 24, 30 выполняются из двойного слоя мелиоративной ткани или резины. Калиброванное отверстие, показанное на боковой поверхности трубопровода 4 (фиг. 6) стрелкой, служит для соединения входа задвижки с полостью управления мембраной 30, и в режиме регулирования расхода через задвижку это отверстие может быть заглушено. Это отверстие предназначено для ручного дублирования работы программного управления задвижкой 6 посредством вентиля 33. При этом сечение трубки 8 у вентиля 33 должно быть больше сечения этого отверстия. В режиме регулирования расходов это отверстие не обязательно закрывать заглушкой, так как при этом обес- печив-ается непрерывная продувка воздушных линий управления 8 и устраняется возможность их заиления илом при застое воды в них.
Профиль дисков 13, их расположение на выходном валу программатора б, ход поршня 22 и положение мембран 24, 30 выбираются расчетом или экспериментом, при которых обеспечиваются лучшие по технологии полива параметры расхода воды в борозду, например, для полива дискретной струей с плавно нарастающим, а затем убы- вающим расходом воды в борозду. Смена программы полива осуществляется путем замены или смещения на оси выходного вала программных дисков 13.
Автоматизированная система борозд- кового полива работает следующим образом.
При подаче воды из водозаборного устройства 1 в водораспределительный трубопровод 2 через вентиль 3 из атмосферы 11 одновременно подается необходимое для управления количество воздуха, который последовательно поступает в сосуды 5.
Полив осуществляется рассредоточенной струей одновременно на одном из участков № 1-6 слева и справа от трубопровода 2 из всех (или части) поливных трубопроводов 4.
При транспорте воды и воздуха через трубопровода 2 одновременно во все поливные трубопроводы 4 воздух накапливается
в сосудах 10 и не выносится в атмосферу через поливные трубопроводы 4, кроме последних. Это достигается посредством расположения входов трубопроводов 4 ниже входов (и выходов) трубопроводов 2 (фиг. 2, 3). При этом трубопроводы 2 и 4 соединяются между собой через емкость сосуда 5. Это обеспечивает сепарацию в сосуде 5 воздуха для работы программного устройства 9.
0 Воздух накапливается всегда (во все время полива) во всех сосудах 5 до уровня верхней кромки трубопровода 2, в том числе и при поливе последнего участка. Если последний участок не поливает, то избыточный воздух
5 сверх упомянутой кромки сосуда 5, поступает в поливной трубопровод 4, работающий последним. Через линию питания 10 воздух с постоянным давлением поступает через дроссель 22 в пневмоемкости 19 и через
0 калиброванные отверстия 20 в атмосферу. В программном устройстве один из пневмо- цилиндров 19 управляет задвижкой 6. Пока работает данный поливной трубопровод 4 или группа гидрантов на нем с заданным
5 программной дисков 13 задвижка б должна быть открыта полностью или частично в соответствии с программой работы. Для этого необходимо, чтобы были открыты все или часть отверстий 20. Программа открытия от0 верстий 20 синхронно с программой полива задается конфигурацией диска 13. соответствующего для пневмоцилиндра 19 задвижки 6.
Таким образом, в соответствии с задан5 ной программатором 9 программой полива в емкостях 19 устанавливается давление управления в линиях управления 8, обеспечивающее изменение положения мембран 24, 30 и расхода воды на полив. Расход воды в
0 борозды плавно изменяется по любой заданной программе полива.
Описанная система обеспечивает возможность задания по любой временной программе изменения расхода воды в бо5 розды при синхронном изменении расхода воды в каждой борозде. Только при выполнении этих требований возможен минимальный расход воды на единицу с/х продукции. Забор воздуха из трубопровода
0 улучшает динамические характеристики системы и упрощает входящие в систему устройства путем синхронного изменения давления в трубопроводах и линиях управления.
5Возможность параллельного управления задвижками и группами микрогидрантов обеспечивает без изменения расхода на водозаборе перераспределение расхода воды в борозды более, чем в 16 раз. Это позволяет осуществлять полив любых с/х кул0тур
сплошного и узкорядного сева. Малое сечение полисных трубопроводов 4 и применение программною управления по любой технологии полива обеспечивает сокращение нормы полива до 2 раз. и снижение капитальных затрат на строительство до 600 руб/га.
Формула изобретения 1. Автоматизированная система бороз- дкового полива, включающая закрытые во- дораспределительный трубопровод и сообщенные с ним через пневмоуправляе- мые задвижки поливные трубопроводы, а также пневмоуправляемые микрогидранты, установленные на каждом поливном тру- бопроводе, А программное устройство, соединенное с микрогидрантами и с задвижкой пнеимолиниями управления, отличаю - щ а я с я тем, что, с целью упрощения конструкции и повышения качества полива, система снабжена установленными на каждом поливном трубопроводе герметичными цилиндрическими пневмососудами, верхняя часть каждого из которых соединена пневмолинией питания с программным уст- ройством, а нижняя часть соединена с водораспределительным трубопроводом и с установленным ниже последнего поливным трубопроводом с пневмоуправляемой задвижкой, а также пневмоцилиндрами про- граммного устройства соединенными с пневмолинией питания через дроссели и с атмосферой через калиброванные отверстия, выполненные вдоль образующих пневмоцилиндров с возможностью пере- крытия их внутренними подвижными цилиндрами.
2.Система по п, 1, отличающаяся тем, что программное устройство выполнено в виде автономного привода, на выходном валу которого установлены профильные диски, кинематически связанные с подвижными внутренними цилиндрами.
3.Система поп. 1,отличающаяся тем, что каждая пневмоуп-равляемая задвижка выполнена в виде закрытого цилиндрического корпуса с выходным патрубком на одном из его торцев и с установленным внутри него входным патрубком с торцевой крышкой и щелевыми прорезями, выполненными с возможностью перекрытия их цилиндрической эластичной мембраной, установленной между торцами корпуса, причем на боковой поверхности корпуса задвижки выполнено отверстие для подачи воздуха, соединенное с пневмолинией управления и через дроссель с выходным патрубком задвижки.
4.Система по п. 1,отличающаяся тем, что каждый пневмоуправляемый микрогидрант выполнен в виде цилиндрического корпуса, на одном из торцев которого выполнено калиброванное выходное отверстие с возможностью перекрытия его эластичной прокладкой, установленной снаружи корпуса, и пропущенного через другой торец входного патрубка с заглушенным торцем и щелевыми отверстиями, выполненными с возможностью перекрытия их цилиндрической эластичной мембраной, установленной между торцами корпуса, при этом полость между внешней стороной мембраны и внутренней поверхностью корпуса соединена с пневмолинией управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система бороздкового полива | 1989 |
|
SU1674752A1 |
| Способ управления бороздковым поливом и автоматизированная система для его осуществления | 1989 |
|
SU1674751A1 |
| Автоматизированная оросительная система | 1988 |
|
SU1661272A1 |
| Автоматизированная самонапорная оросительная система | 1989 |
|
SU1727717A1 |
| Оросительная система | 1989 |
|
SU1650042A1 |
| Автоматизированная система бороздкового полива | 1987 |
|
SU1553035A1 |
| Автоматизированная система импульсного полива по бороздам | 1983 |
|
SU1189399A1 |
| Автоматизированная система бороздкового полива | 1986 |
|
SU1429995A1 |
| Автоматизированная самонапорная оросительная система | 1989 |
|
SU1681780A2 |
| Автоматизированная оросительная система | 1982 |
|
SU1161019A1 |
Использование; сельское хозяйство в мелиорации. Сущность изобретения: система включает водоисточник (лотковый ороситель), закрытый водораспределительный трубопровод с задвижками на входе поливных трубопроводов с микрогидрантами и программное устройство с пневмососудом задатчиком давления воздуха в линиях управления задатчик давления выполнен в виде пневмоцилиндра, подключенного к , пневмососуду через дроссель с калиброванными воздухо-выпускными отверстиями, выполненными с возможностью перекрытия их поршнем. Последний кинематический связан с профильным диском, имеющим механический гидро- или электропривод, число пневмоцилиндров и соответственно профильных дисков программного устройства соответствует числу управляемых поливных трубопроводов. Пневмоци- линдры линиями управления соединены с управляемыми задвижками и полостями управления микрогидрантов, подвижная мембрана которых выполнена цилиндрической и установлена над водовыпускными отверстиями из щелей на подводящем патрубке. Площадь щелей в 1,3-2 раза больше площади отверстия подводящего патрубка, а на выходе микрогидранта установлено калиброванное отверстие с обратным клапаном. Для обеспечения плавного регулирования расхода воды задвижка выполнена с перфорацией, площадь которой больше площади сечения патрубка более чем в 1,3-2 раза. Над перфорацией патрубка установлена цилиндрическая мембрана, герметично закрепленная в обойме верхней трубы, причем полость управления мембрачы через дроссель сообщена с подводящим патрубком, через вентиль - с отводящим патрубком, а через линию управления с пневмоцилиндром программного устройства. 1 с. и 3 з.п. ф-лы, 6 ил. со с vj XI VI 2 СЛ
УЧ6СТОК 6
Фиг, 2
-к
и
31
12
/
фиг.З
V
Ю
8 33
М
31
12
+
/
7 / 30 29
1
| Устройство для психофизиологических исследований | 1988 |
|
SU1553055A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
