Изобретение относится к технике электрических машин и предназначено для привода валов различных машин.
Известен электродвигатель с возвратно-поступательным перемещением якоря, содержащий два соосно установленных электромагнитных соленоида, ферромагнитный якорь, совершающий возвратно-поступательное перемещение в осевом канале соленоидов, кривошипно-шатунный механизм, связанный с якорем посредством шатуна, датчики концевого положения, связанные с устройством переключателя напряжения в соленоидах.
Вышеописанный электродвигатель имееттяжелый якорь, громоздкую конструкцию датчиков концевого положения,
Целью изобретения является повышение надежности путем улучшения конструкции якоря и датчиков концевого положения якоря.
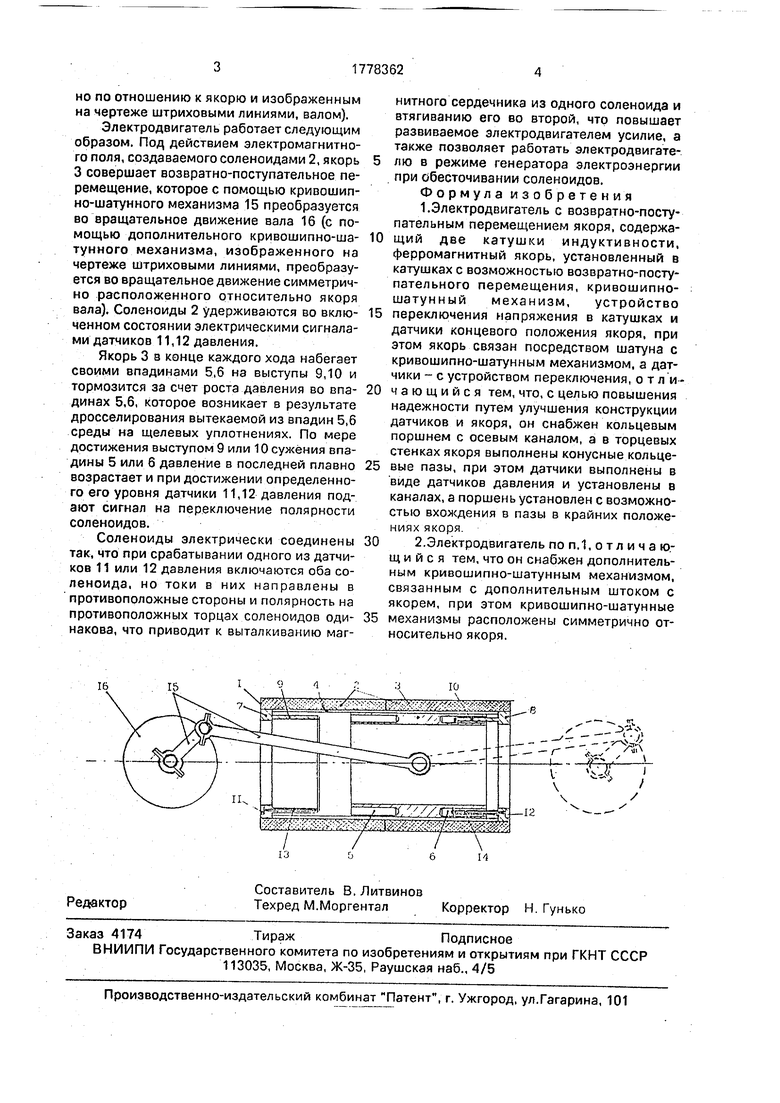
На чертеже изображен предлагаемый электродвигатель.
Электродвигатель с возвратно-поступательным перемещением якоря содержит корпус 1, в котором соосно установлены соленоиды 2, а в осевом канале 4 совершает возвратно-поступательное перемещение якорь 3. Выступы 9,10 в крышках 7,8 установлены с выемками 5,6 якоря 3 с образованием щелевых уплотнений, причем выемки 5,6 в торцовых стенках якоря выполнены в виде конусных кольцевых пазов. Датчики 11,12 положения якоря выполнены в виде датчиков давления, приемные каналы 13,14 которых выведены на торцы крышек 7,8, что исключает влияние на датчики наводок от электромагнитных полей соленоидов 2.
Якорь3, выполненный из предварительно намагниченного магннтотвердого материала, с помощью кривошипно-шатунного механизма 15 связан с взлом 16 (связан кривошипно-шатунным механизмом с дополнительным, расположенным симметрич(Л
С
xj vi
00
со о
но по отношению к якорю и изображенным на чертеже штриховыми линиями, валом).
Электродвигатель работает следующим образом. Под действием электромагнитного поля, создаваемого соленоидами 2, якорь 3 совершает возвратно-поступательное перемещение, которое с помощью кривошип- но-шатунного механизма 15 преобразуется во вращательное движение вала 16 (с помощью дополнительного кривошипно-ша- тунного механизма, изображенного на чертеже штриховыми линиями, преобразуется во вращательное движение симметрично расположенного относительно якоря вала). Соленоиды 2 удерживаются во вклю- ченном состоянии электрическими сигналами датчиков 11,12 давления.
Якорь 3 в конце каждого хода набегает своими впадинами 5,6 на выступы 9,10 и тормозится за счет роста давления во впа- динах 5,6, которое возникает в результате дросселирования вытекаемой из впадин 5,6 среды на щелевых уплотнениях. По мере достижения выступом 9 или 10 сужения впадины 5 или 6 давление в последней плавно возрастает и при достижении определенного его уровня датчики 11,12 давления подают сигнал на переключение полярности соленоидов.
Соленоиды электрически соединены так, что при срабатывании одного из датчиков 11 или 12 давления включаются оба соленоида, но токи в них направлены в противоположные стороны и полярность на противоположных торцах соленоидов оди- накова, что приводит к выталкиванию магнитного сердечника из одного соленоида и втягиванию его во второй, что повышает развиваемое электродвигателем усилие, а также позволяет работать электродвигателю в режиме генератора электроэнергии при обесточивании соленоидов. Формула изобретения 1.Электродвигатель с возвратно-поступательным перемещением якоря, содержащий две катушки индуктивности, ферромагнитный якорь, установленный в катушках с возможностью возврати о-поступательного перемещения, кривошипно- шатунный механизм, устройство переключения напряжения в катушках и датчики концевого положения якоря, при этом якорь связан посредством шатуна с кривошипно-шатунным механизмом, а датчики - с устройством переключения, отличающийся тем, что, с целью повышения надежности путем улучшения конструкции датчиков и якоря, он снабжен кольцевым поршнем с осевым каналом, а в торцевых стенках якоря выполнены конусные кольцевые пазы, при этом датчики выполнены в виде датчиков давления и установлены в каналах, а поршень установлен с возможностью вхождения в пазы в крайних положениях якоря
2 Электродвигатель по п. 1, о т л и ч а ю- щ и и с я тем, что он снабжен дополнительным кривошипно-шатунным механизмом, связанным с дополнительным штоком с якорем, при этом кривошипно-шатунные механизмы расположены симметрично относительно якоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный насос-двигатель | 1989 |
|
SU1788320A1 |
| Электромагнитный насос-двигатель | 1991 |
|
SU1810603A1 |
| Электромагнитный насос | 1988 |
|
SU1610067A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ РАСПИЛОВКИ ПРЕИМУЩЕСТВЕННО МЯСНЫХ ТУШ | 1996 |
|
RU2107438C1 |
| Стан холодной прокатки труб переменного сечения | 1987 |
|
SU1496849A1 |
| Приводной механизм для диапроектора | 1979 |
|
SU775711A1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1977 |
|
SU669596A1 |
| Зубодолбежный станок | 1991 |
|
SU1779492A1 |
| ДВУХТАКТНЫЙ АКСИАЛЬНЫЙ ДВИГАТЕЛЬ | 1998 |
|
RU2154176C2 |
| Магнитный сепаратор очиститель | 1983 |
|
SU1501356A1 |
Сущность изобретения: ферромагнитный якорь установлен в катушках индуктивности с возможност1ю возвратно-поступательного перемещения. Якорь связан шатуном с кривошипно-шатунным механизмом, датчики концевого положения якоря - с устр-вом переключения напряжения в катушках. В торцовых стенках якоря выполнены конусные кольцевые пазы. Датчики выполнены в виде датчиков давления и установлены в каналах. Кольцевой поршень с осевым каналом установлен с возможностью вхождения в пазы в крайних положениях якоря. Дополнительный кри- вошипно-шатунный механизм связан с дополнительным штоком с якорем. Криёо- шипно-шатунные механизмы расположены симметрично относительно якорл. 1 з.п.ф- лы, 1 ил.
1Ь
Ib
10
| Гусев С,А | |||
| Очерки по истории развития электрических машин, изд | |||
| Г.Э.И., Л.: 1955, с.34, фиг.1-17. |
