со
с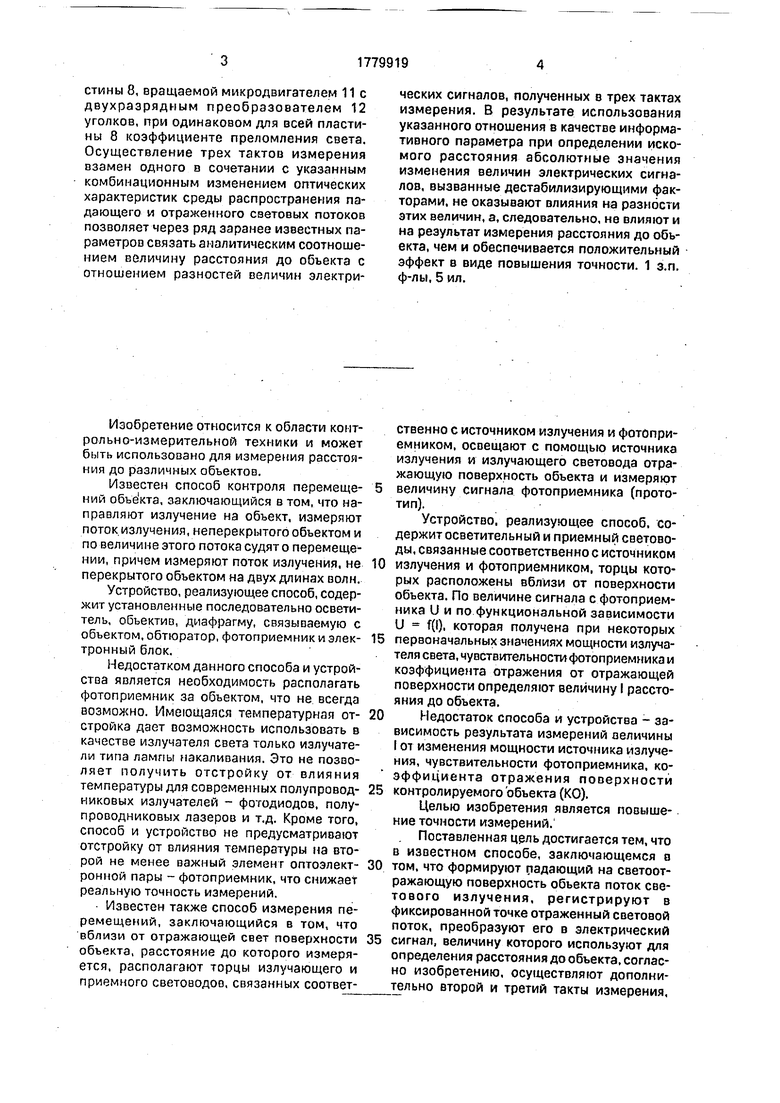

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения расстояний до объекта | 1990 |
|
SU1779918A1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2012 |
|
RU2515339C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК | 2005 |
|
RU2292525C1 |
| Волоконно-оптический преобразователь | 1990 |
|
SU1747896A1 |
| Оптический датчик перемещений | 1990 |
|
SU1767327A1 |
| ИЗМЕРИТЕЛЬ ШЕРОХОВАТОСТИ | 2008 |
|
RU2375677C1 |
| Измеритель разности двух давлений | 1991 |
|
SU1812451A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ПОВЕРХНОСТИ И ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ | 2010 |
|
RU2445589C1 |
| НЕРАЗРУШАЮЩИЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАПРЯЖЕНИЯ В ПОВЕРХНОСТНОМ СЛОЕ ИЗДЕЛИЯ И ОПРЕДЕЛИТЕЛЬ НАПРЯЖЕНИЯ | 2013 |
|
RU2534565C1 |
Изобретение относится к области контрольно-измерительной техники. Целью изобретения является повышение точности за счет исключения влияния на результат измерения нестабильности мощности источника света, чувствительности фотоприемника и коэффициента отражения поверхности объекта. Падающий на светоотражающую поверхность 4 объекта поток светового излучения отражается ею, регистрируется в фиксированной точке и преобразуется в электрический сигнал. Измерение проводится в три такта, в каждом из которых подающий и отраженный потоки проходят через комбинацию из прозрачной и полупрозрачной половин 9 и 10 комбинированной плэ7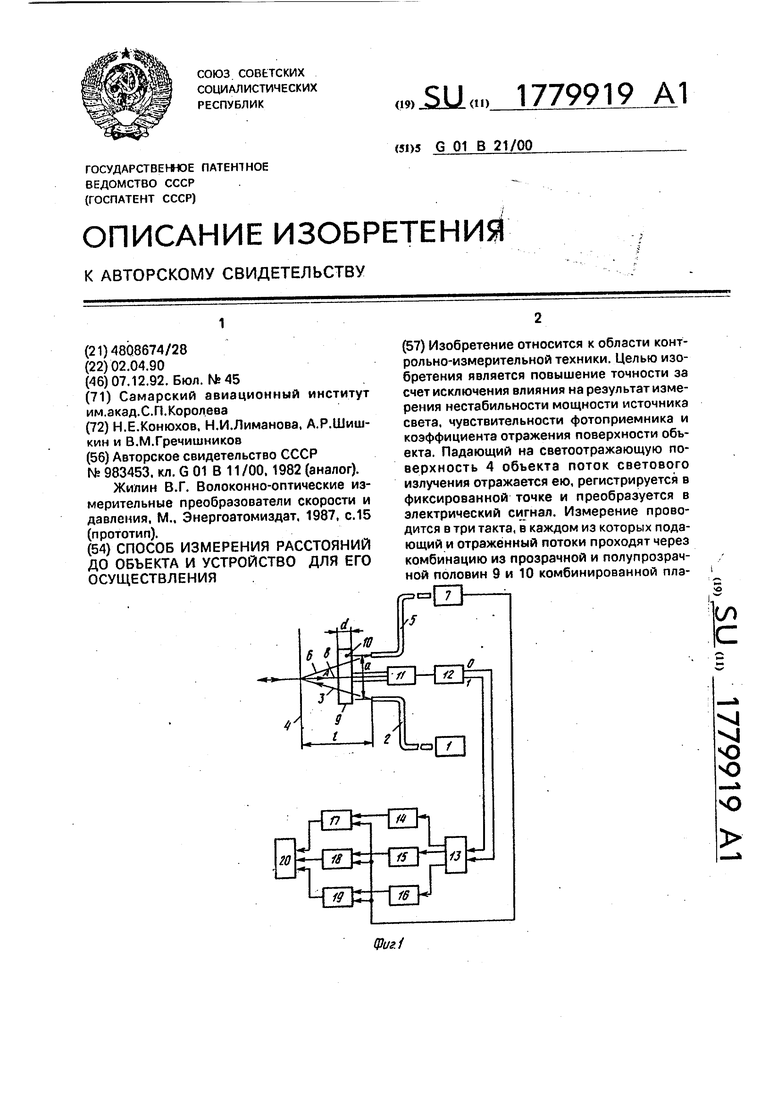
-//
VI
v|
SQ
ю
д
чэ
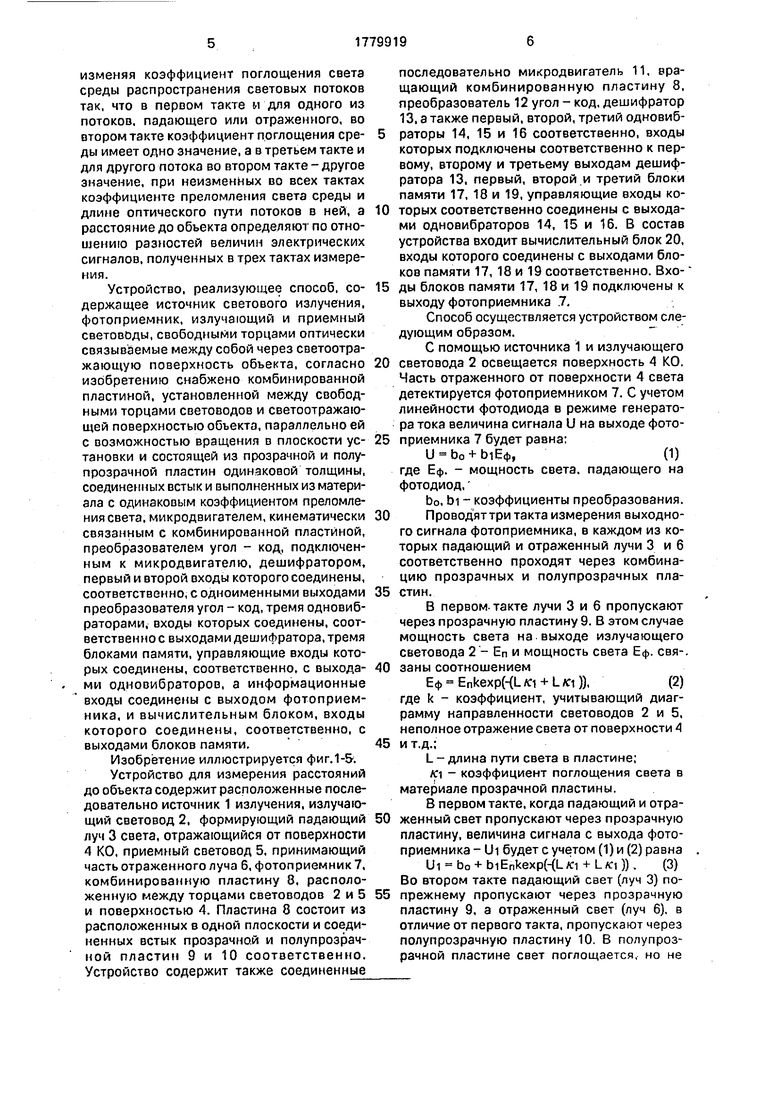
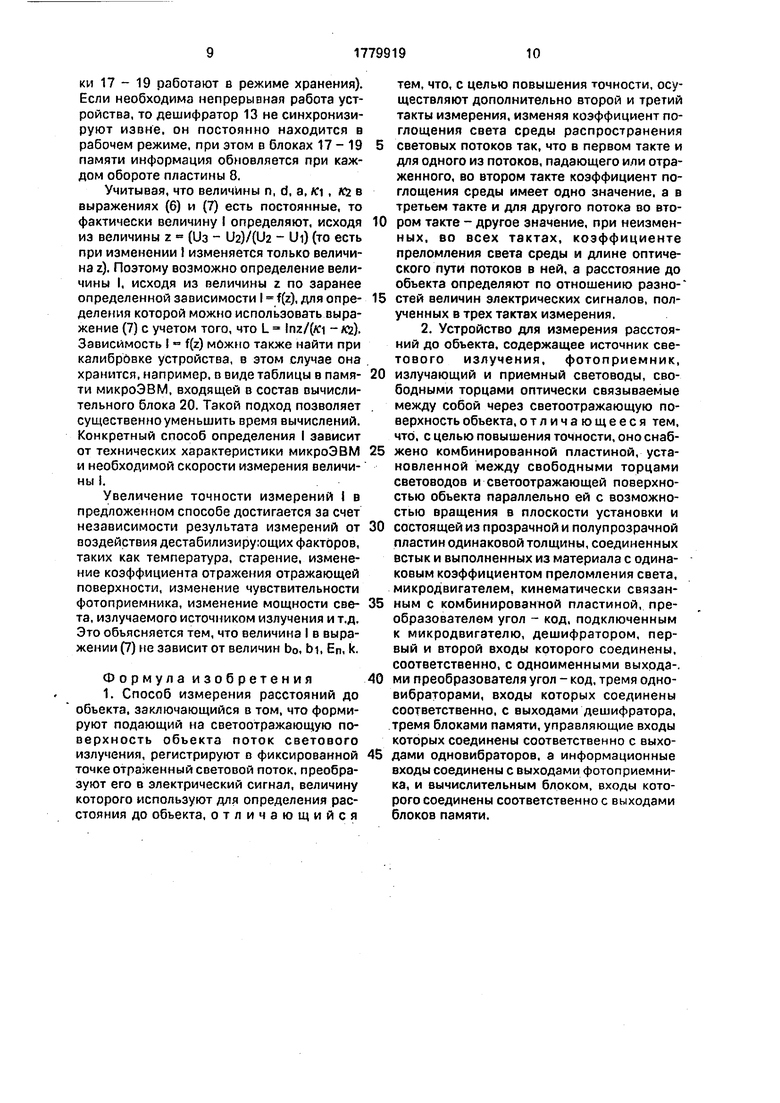
стины 8, вращаемой микродвигателем 11с двухразрядным преобразователем 12 уголков, при одинаковом для всей пластины 8 коэффициенте преломления света. Осуществление трех тактов измерения взамен одного в сочетании с указанным комбинационным изменением оптических характеристик среды распространения падающего и отраженного световых потоков позволяет через ряд заранее известных параметров связать аналитическим соотношением величину расстояния до объекта с отношением разностей величин электриИзобретение относится к области контрольно-измерительной техники и может быть использовано для измерения расстояния до различных объектов.
Известен способ контроля перемещений объе кта, заключающийся в том, что направляют излучение на объект, измеряют поток излучения, неперекрытого объектом и по величине этого потока судят о перемещении, причем измеряют поток излучения, не перекрытого объектом на двух длинах волн.
Устройство, реализующее способ, содержит установленные последовательно осветитель, объектно, диафрагму, связываемую с объектом, обтюратор, фотоприемник и электронный блок.
Недостатком данного способа и устройства является необходимость располагать фотоприемник за объектом, что не всегда возможно. Имеющаяся температурная отстройка дает возможность использовать в качестве излучателя света только излучатели типа лампы накаливания. Это не позволяет получить отстройку от влияния температуры для современных полупроводниковых излучателей - фотодиодов, полупроводниковых лазеров и т.д. Кроме того, способ и устройство не предусматривают отстройку от влияния температуры на второй не менее важный элемент оптоэлект- ронной пары - фотоприемник, что снижает реальную точность измерений.
Известен также способ измерения перемещений, заключающийся в том, что вблизи от отражающей свет поверхности объекта, расстояние до которого измеряется, располагают торцы излучающего и приемного световодов, связанных соответческих сигналов, полученных в трех тактах измерения. В результате использования указанного отношения в качестве информативного параметра при определении искомого расстояния абсолютные значения изменения величин электрических сигналов, вызванные дестабилизирующими факторами, не оказывают влияния на разности этих величин, а, следовательно, не влияют и на результат измерения расстояния до объекта, чем и обеспечивается положительный эффект в виде повышения точности. 1 з.п. ф-лы, 5 ил.
ственно с источником излучения и фотоприемником, освещают с помощью источника излучения и излучающего световода отражающую поверхность объекта и измеряют
величину сигнала фотоприемника (прототип).
Устройство, реализующее способ, содержит осветительный и приемный световоды, связанные соответственно с источником
излучения и фотоприемником, торцы которых расположены вблизи от поверхности объекта. По величине сигнала с фотоприемника U и по функциональной зависимости U f(l), которая получена при некоторых
первоначальных значениях мощности излучателя света, чувствительности фотоприемника и коэффициента отражения от отражающей поверхности определяют величину I расстояния до объекта.
Недостаток способа и устройства - зависимость результата измерений оеличины I от изменения мощности источника излучения, чувствительности фотоприемника, коэффициента отражения поверхности
контролируемого объекта (КО).
Целью изобретения является повышение точности измерений.
Поставленная цель достигается тем, что в известном способе, заключающемся в
том, что формируют падающий на светоотражающую поверхность объекта поток све- тового излучения, регистрируют в фиксированной точке отраженный световой поток, преобразуют его в электрический
сигнал, величину которого используют для определения расстояния до объекта, согласно изобретению, осуществляют дополнительно второй и третий такты измерения,
изменяя коэффициент поглощения света среды распространения световых потоков так, что в первом такте и для одного из потоков, падающего или отраженного, во втором такте коэффициент поглощения ере- ды имеет одно значение, а в третьем такте и для другого потока во втором такте -другое значение, при неизменных во всех тактах коэффициенте преломления света среды и длине оптического пути потоков в ней, а расстояние до объекта определяют по отношению разностей величин электрических сигналов, полученных в трех тактах измерения.
Устройство, реализующее способ, со- держащее источник светового излучения, фотоприемник, излучающий и приемный световоды, свободными торцами оптически связываемые между собой через светоотражающую поверхность объекта, согласно изобретению снабжено комбинированной пластиной, установленной между свободными торцами световодов и светоотражающей поверхностью объекта, параллельно ей с возможностью вращения в плоскости ус- тановки и состоящей из прозрачной и полупрозрачной пластин одинаковой толщины, соединенных встык и выполненных из материала с одинаковым коэффициентом преломления света, микродвигателем, кинематически связанным с комбинированной пластиной, преобразователем угол - код, подключенным к микродвигателю, дешифратором, первый и второй входы которого соединены, соответственно, с одноименными выходами преобразователя угол - код, тремя одновиб- раторами, входы которых соединены, соответственное выходами дешифратора, тремя блоками памяти, управляющие входы которых соединены, соответственно, с выхода- ми одновибраторов, а информационные входы соединены с выходом фотоприемника, и вычислительным блоком, входы которого соединены, соответственно, с выходами блоков памяти.
Изобретение иллюстрируется фиг.1-&.
Устройство для измерения расстояний до объекта содержит расположенные последовательно источник 1 излучения, излучающий световод 2, формирующий падающий луч 3 света, отражающийся от поверхности 4 КО, приемный световод 5, принимающий часть отраженного луча 6, фотоприемник 7, комбинированную пластину 8. расположенную между торцами световодов 2 и 5 и поверхностью 4. Пластина 8 состоит из расположенных в одной плоскости и соединенных встык прозрачной и полупрозрачной пластин 9 и 10 соответственно. Устройство содержит также соединенные
последовательно микродвигатель 11, вращающий комбинированную пластину 8, преобразователь 12 угол - код, дешифратор 13, а также первый, второй, третий одновиб- раторы 14, 15 и 16 соответственно, входы которых подключены соответственно к первому, второму и третьему выходам дешифратора 13, первый, второй и третий блоки памяти 17, 18 и 19, управляющие входы которых соответственно соединены с выходами одновибраторов 14, 15 и 16. В состав устройства входит вычислительный блок 20, входы которого соединены с выходами блоков памяти 17, 18 и 19 соответственно. Входы блоков памяти 17, 18 и 19 подключены к выходу фотоприемника 7.
Способ осуществляется устройством следующим образом.
С помощью источника 1 и излучающего световода 2 освещается поверхность 4 КО. Часть отраженного от поверхности 4 света детектируется фотоприемником 7. С учетом линейности фотодиода в режиме генератора тока величина сигнала U на выходе фотоприемника 7 будет равна:
и Ьо + 01Еф,(1)
где Еф. - мощность света, падающего на фотодиод, bo, bi - коэффициенты преобразования.
Проводяттри такта измерения выходного сигнала фотоприемника, в каждом из которых падающий и отраженный лучи 3 и 6 соответственно проходят через комбинацию прозрачных и полупрозрачных пластин.
В первом такте лучи 3 и 6 пропускают через прозрачную пластину 9. В этом случае мощность света на выходе излучающего световода 2 - Еп и мощность света Еф. свя-. заны соотношением
Еф - EnkexpHL лп + L лп )),(2)
где k - коэффициент, учитывающий диаграмму направленности световодов 2 и 5, неполное отражение света от поверхности 4 и т.д.;
L - длина пути света в пластине;
/ci - коэффициент поглощения света в материале прозрачной пластины.
В первом такте, когда падающий и отраженный свет пропускают через прозрачную пластину, величина сигнала с выхода фотоприемника - Ui будет с учетом (1) и (2) равна
Ui bo + bi Enkexp(-(L Л1 + L «л )). (3) Во втором такте падающий свет (луч 3) по- прежнему пропускают через прозрачную пластину 9, а отраженный свет (луч 6), в отличие от первого такта, пропускают через полупрозрачную пластину 10. В полупрозрачной пластине свет поглощается, но не
рассеивается, а величина сигнала с выхода фотоприемиика 7 во втором такте -1)2 будет равна
U2 bo + biEnkexp(-(L/ei + )),(4)
где К2 - коэффициент поглощения света в материале полупрозрачной пластины.
В третьем такте и падающий (луч 3), и отраженный (луч 6) свет пропускают через полупрозрачную пластину, поэтому величина сигнала с выхода фотоприемника 7 в третьем такте составит
Уз bo + bIEnkexp(-(L K2 + L K2)). (5) Используя (3), (4) и (5), можно найти величину
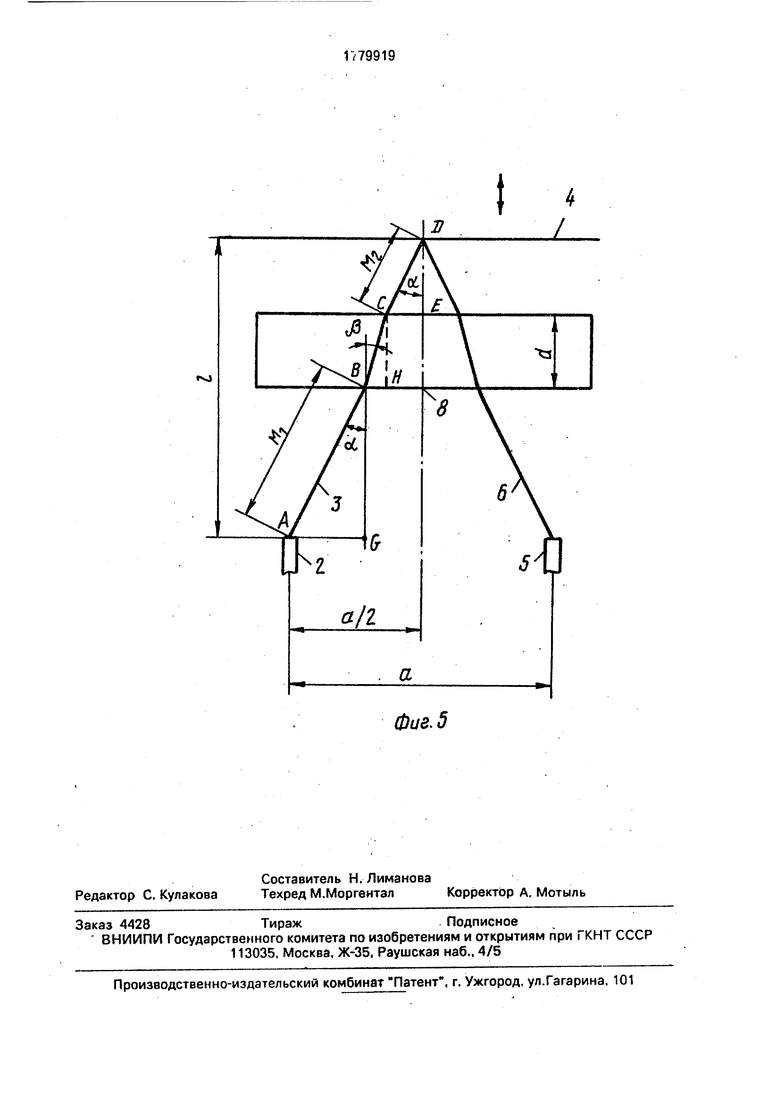
L (ln(U3 - U2)/(U2 - Ui)D/(к - К2) (6) Измеряемое расстояние I, исходя из геометрических соображений, можно представить следующей формулой
1 / п
а.
)
xVl7(1-n2) + n2d2,
где L находится в соответствии с выражением (6),
п - коэффициент преломления света на границе воздух - пластина,
d -толщина пластины,
а - расстояние между центрами световодов 2 и 5.
Необходимо отметить, что результат измерения I не зависит от величин bo, bi, En, k.
Устройство, реализующее способ, работает следующим образом.
Вал микродвигателя 11, который вращает комбинированную пластину 8, установлен перпендикулярно плоскости пластины 8. Вращение пластины обеспечивает проведение трех тактов измерения сигналов Ui, Уз, Us фотоприемника 7 согласно описанному выше способу. При повороте вала микродвигателя 11 меняется входная величина (угол) на входе двухразрядного преобразователя 12 угол - код. Так как эгот преобразователь должен иметь всего два разряда, то он может быть выполнен, например, в виде контактов (электропроводящих дорожек), расположенных непосредственно на валу или же содержать диск, расположенный на валу микродвигателя 11. У двухразрядного преобразователя угол - код цифровой код на выходе изменяется при изменении угла на каждые 90°. Поэтому в первом такте на выходе преобразователя 12 имеется цифровой код 00. Во втором такте на выходе преобразователя 12 имеется цифровой код 01, а в третьем такте - цифровой
код 10, При повороте вала на оставшиеся 90° до полного оборота вала никаких измерений сигналов фотоприемника 7 не производится. Дешифратор 13 дешифрирует
5 данные цифровые коды, в результате чего на первом, втором и третьем выходах дешифратора 13 появляются сигналы в первом, втором и третьем тактах соответственно. По переднему фронту этих сигналов эапуска10 ются одновибраторы 14, 15 и 16, каждый из которых генерирует импульс длительностью Гимп. Импульсы.с выходов одновибраторов 14, 15 и 16 поступают на управляющие входы блоков памяти 17, 18 и 19. Благодаря
15 этому в первом такте, когда на выходе фотоприемника 7 имеется сигнал Ui, в блоке 17 памяти запоминается величина Ui. Во втором такте, когда на выходе фотоприемника
7имеется сигнал U2. в блоке 18 памяти за- 20 поминается величина U2, а в третьем такте,
когда на выходе фотоприемника 7 имеется сигнал Us, в блоке 19 памяти запоминается величина Уз. Длительность импульсов одно- вибратора выбирают такой, чтобы в блоках
25 ,памяти 17, 18 и 19 успевали запоминаться соответствующие сигналы. Типичные значения Гимп составляют единицы - десятки ми- лисекунд.
Сигналы Ui, U2, из с блоков 17, 18 и 19
30 памяти поступают в вычислительный блок 20.который вычисляет расстояние I в соответствии с выражениями (6) и (7). В памяти блока 20 хранятся величины d, а, п, к и KI .
8одном из вариантов вычислительный блок 35 20 содержит микроЭВМ и интерфейс, последний в свою очередь содержит аналого- цифровой преобразователь (АЦП) и коммутатор, который подключает АЦП к блокам 17, 18, 19 памяти. Применение бло40 ков 12-19 позволяет не синхронизировать работу микроЭВМ и вращение комбинированной пластины 8.
Кроме этого, благодаря наличию блоков 12-19 возможна работа устройства в стро45 бирующем режиме. В этом случае с какого- либо внешнего устройства (на фиг,1 не показано) на синхронизирующий вход дешифратора 13 (на фиг.1 не показан) поступает в момент времени, когда необходимо
50 измерить величину I, синхронизирующий сигнал, длительность которого Тсинхр. Т0р.. где ТВр. - период вращения микродвигателя 11. Работа дешифратора 13 и, следовательно, блоков 14 - 19 возможна только при
55 наличии этого синхронизирующего импульса. Следовательно, в блоках памяти запоминается информация, соответствующая моменту времени, когда действовал синхронизирующий сигнал (в остальное время блоки 17 - 19 работают в режиме хранения). Если необходима непрерывная работа устройства, то дешифратор 13 не синхронизируют извне, он постоянно находится в рабочем режиме, при этом в блоках 17 - 19 памяти информация обновляется при каждом обороте пластины 8.
Учитывая, что величины n, d, а, ЛП , Л5 в выражениях (6) и (7) есть постоянные, то фактически величину I определяют, исходя из величины z (Ua - U2)/(U2 - Ui) (то есть при изменении 1 изменяется только величина z). Поэтому возможно определение величины I, исходя из величины z по заранее определенной зависимости I f(z), для определения которой можно использовать выражение (7) с учетом того, что L lnz/(/ci - AS). Зависимость I f(z) можно также найти при калибровке устройства, в этом случае она хранится, например, в виде таблицы в памяти микроЭВМ, входящей в состав вычислительного блока 20. Такой подход позволяет существенно уменьшить время вычислений. Конкретный способ определения I зависит от технических характеристики микроЭВМ и необходимой скорости измерения величины I.
Увеличение точности измерений I в предложенном способе достигается за счет независимости результата измерений от воздействия дестабилизирующих факторов, таких как температура, старение, изменение коэффициента отражения отражающей поверхности, изменение чувствительности фотоприемника, изменение мощности света, излучаемого источником излучения и т.д. Это объясняется тем, что величина I в выражении (7) не зависит от величин bo, bi, En, k.
Формула изобретения 1. Способ измерения расстояний до объекта, заключающийся в том, что формируют подающий на светоотражающую поверхность объекта поток светового излучения, регистрируют в фиксированной точке отраженный световой поток, преобразуют его в электрический сигнал, величину которого используют для определения расстояния до объекта, отличающийся
тем, что, с целью повышения точности, осуществляют дополнительно второй и третий такты измерения, изменяя коэффициент поглощения света среды распространения 5 световых потоков так, что в первом такте и для одного из потоков, падающего или отраженного, во втором такте коэффициент поглощения среды имеет одно значение, а в третьем такте и для другого потока во вто0 ром такте - другое значение, при неизмен- ных. во всех тактах, коэффициенте преломления света среды и длине оптического пути потоков в ней, а расстояние до объекта определяют по отношению разно5 стей величин электрических сигналов, полученных в трех тактах измерения.
0 излучающий и приемный световоды, свободными торцами оптически связываемые между собой через светоотражающую поверхность объекта,отличающееся тем, что, с целью повышения точности, оно снаб5 жено комбинированной пластиной, установленной между свободными торцами световодов и светоотражающей поверхностью объекта параллельно ей с возможностью вращения в плоскости установки и
0 состоящей из прозрачной и полупрозрачной пластин одинаковой толщины, соединенных встык и выполненных из материала с одинаковым коэффициентом преломления света, микродвигателем, кинематически связан5 ным с комбинированной пластиной, преобразователем угол - код, подключенным к микродвигателю, дешифратором, первый и второй входы которого соединены, соответственно, с одноименными выхода-.
0 ми преобразователя угол - код, тремя одно- вибраторами, входы которых соединены соответственно, с выходами дешифратора, тремя блоками памяти, управляющие входы которых соединены соответственно с выхо5 дами одновибраторов, а информационные входы соединены с выходами фотоприемника, и вычислительным блоком, входы которого соединены соответственно с выходами блоков памяти.
ЫА
Фиг. H
VJ
Фиг. 5
| Способ контроля перемещений объекта и устройство для его осуществления | 1980 |
|
SU983453A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Жилин В.Г | |||
| Волоконно-оптические измерительные преобразователи скорости и давления, М„ Энергоатомиздат | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
