О vl О СЯ О О
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1990 |
|
SU1758821A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2380821C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2003 |
|
RU2251204C1 |
| УСТРОЙСТВО ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2369002C2 |
| Способ управления асинхронным электроприводом | 1988 |
|
SU1628175A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Электропривод переменного тока | 1979 |
|
SU828356A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2389127C2 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
Изобретение относится к электротехнике и может быть использовано в приводах вентиляторов, шлифовальных машин, механизмов горизонтального перемещения подъемно-транспортных машин. Цель изобретения - повышение точности регулирования частоты вращения. Устройство для регулирования частоты вращения асинхронного трехфазного электродвигателя 1 содержит тиристорный регулятор 2 в статорных цепях двигателя, блок 3 управления тиристорным регулятором, блок 4 задания частоты вращения, датчики 5, 6 напряжения и тока статора асинхронного электродвигателя. В устройство введены у Н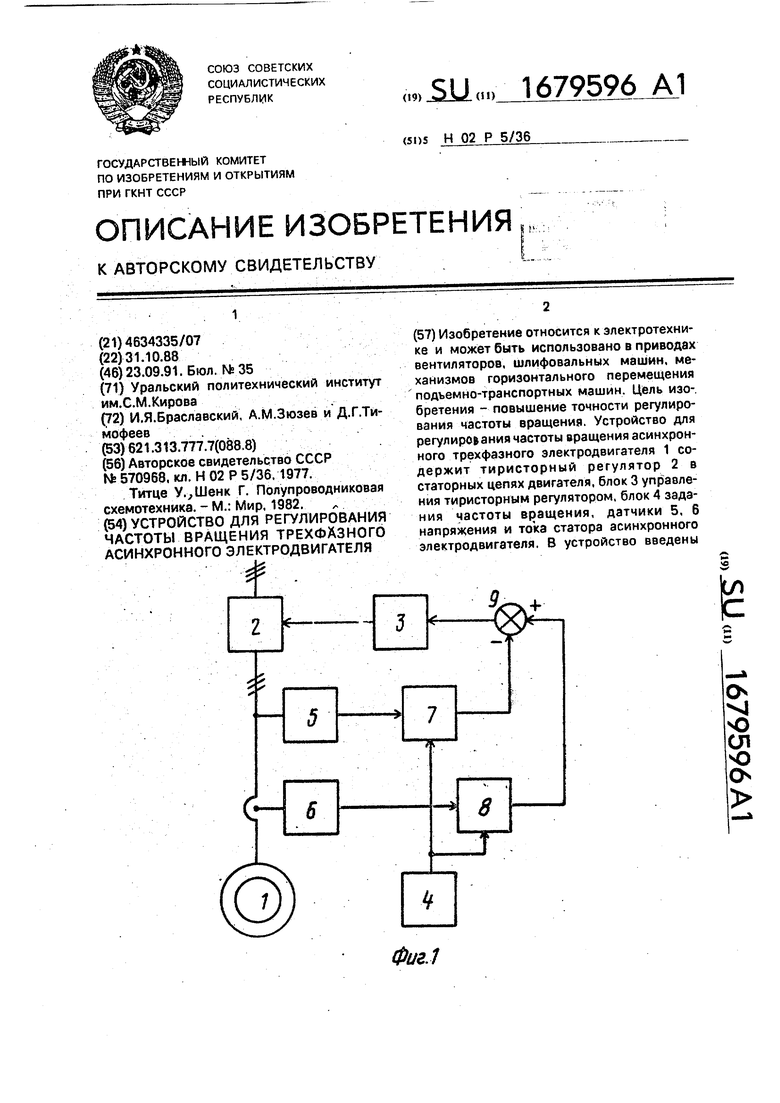
Фиг.1
два функциональных блока 7, 8 и элемент сравненц 9, при этом выходы датчиков 5, 6 через соответствующие блоки 7, 8 подключены к входам элемента сравнения 9, к управляющим входам блоков 7, 8 подсоединены выход блока 4 задания частоИзобретение относится к электротехнике и может быть использовано в электроприводах вентиляторов, шлифовальных машин и механизмов горизонтального перемещения подъемно-транспортных ма- шин.
Цель изобретения - повышение точности регулирования частоты вращения электродвигателя.
На фиг.1 представлена блок-схема устройства для регулирования частоты вращения трехфазного асинхронного электродвигателя; на фиг.2 - блок-схема датчиков напряжения и тока статора; на фиг.З - схема функциональных блоков и блока зада- ния частоты вращения.
Устройство для регулирования частоты вращения асинхронного трехфазного электродвигателя 1 (фиг.1) с тиристорным регулятором 2 в статорных цепях двигателя содержит блок 3 управления тиристорным регулятором, блок4 задания частоты вращения, датчики 5 и 6 напряжения и тока статора. Устройство содержит также функциональные блоки 7 и 8 и элемент 9 сравнения, при этом выходы датчиков 5 и 6 напряжения и тока через соответствующие функциональные блоки 7 и 8 подключены к входам элемента 9 сравнения, причем к управляющим входам блоков 7 и 8 подсоеди- нен выход блока 4 задания частоты вращения, а выход элемента 9 сравнения подключен к входу блока 3 управления тиристорным регулятором.
Устройство работает следующим обра- зом.
В исходном состоянии, когда сигнал задания на скорость на выходе блока 4 остается неизменным, частота вращения двигателя соответствует заданной, а мо- мент, развиваемый двигателем, равен моменту нагрузки, на выходах датчиков 3 и 4 напряжения и тока устанавливаются сигналы, пропорциональные действующему значению первой гармоники соответственно напряжения и тока статора двигателя. На выходах блоков 7 и 8 сигналы будут пропорциональны входным с коэффициентами пропорциональности, зависящими от сигты вращения, а выход элемента сравнения 9 подключен к входу блока 3 управления тири- сторным регулятором. В устройстве осуществляется поддержание заданной частоты вращения при изменении момента нагрузки и колебании напряжения сети. 3 ил.
нала задания на скорость. На выходе элемента 9 сравнения устанавливается сигнал, характеризирующий отклонение модуля комплексного сопротивления асинхронного двигателя от значения модуля комплексного сопротивления при заданной скорости, которое зависит от типа регулятора в блоке 3 управления тиристорным регулятором и величины момента сопротивления на валу двигателя. Блок 3 управления при этом обеспечивает на выходе тиристорного регулятора 2 напряжение, достаточное для преодоления двигателем нагрузки при заданной скорости,
При изменении сигнала задания на частоту вращения на выходе блока 4 на выходах блоков 7 и 8 появятся напряжения, пропорциональные сигналам с выходов датчиков 5 и 6 напряжения и тока с коэффициентами пропорциональности, соответствующими новому напряжению задания на частоту вращения. На выходе элемента 9 сравнения появляется сигнал, характеризующий отклонение модуля комплексного сопротивления асинхронного двигателя от значения при новой заданной частоте вращений. В зависимости от отклонения блок 3 управления тиристорным регулятором будет увеличивать или уменьшать напряжение на выходе тиристорного регулятора 2. Соответственно будет возрастать или уменьшаться ток, момент и, следовательно, частота вращения двигателя. Сигналы на выходах датчиков 5 и б напряжения и тока будут отражать действующее значение первой гармоники напряжения и тока при изменении частоты вращения двигателя 1. Сигналы на выходах блоков 7 и 8 будут пропорциональны сигналам на выходах датчиков 5 и б тока и напряжения с коэффициентами пропорциональности, соответствующими напряжению задания на частоту вращения, а сигнал на выходе элемента 9 сравнения - отклонению модуля комплексного сопротивления асинхронного двигателя при изменившейся скорости от модуля комплексного сопротивления при заданной скорости. Процесс регулирования будет продолжаться до тех пор, пока иа выходе элемента 9
сравнения не установится сигнал отклонения по модулю комплексного сопротивления, обеспечивающий на выходе тиристорного регулятора 2 напряжение, достаточное для преодоления двигателем момента нагрузки при новой заданной скорости.
При изменении момента нагрузки и колебаний напряжения сети, поддержание заданной частоты вращения осуществляется аналогичным образом.
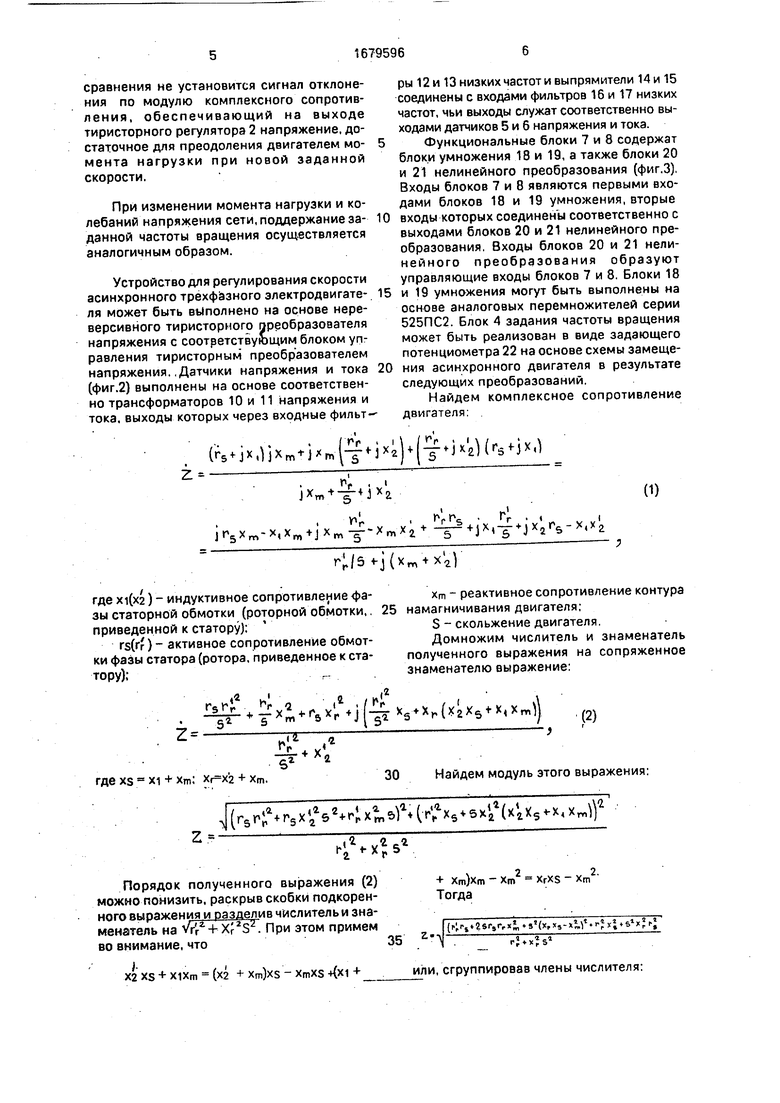
Устройство для регулирования скорости асинхронного трехфазного электродвигателя может быть выполнено на основе нереверсивного тиристорного преобразователя напряжения с соответствующим блоком управления тиристорным преобразователем напряжения. .Датчики напряжения и тока (фиг.2) выполнены на основе соответственно трансформаторов 10 и 11 напряжения и тока, выходы которых через входные фильт1,
(г5ф,ихт + )хт(Ч4)зЧ 2Нг5ФЛ
Z.;
JXm + -ST+J4
r
jrVm-x,xm+jxm -xmxil+ Jk i+ix ir jx ars-x4x 2 +-j(xm + x 2)
где xi(x2) - индуктивное сопротивление фазы статорной обмотки (роторной обмотки, приведенной к статору):
rs(rr)- активное сопротивление обмотки фазы статора (ротора, приведенное к статору);
z
где xs xi + xm; + xm.
Z«
(г г5хЈь }(
1-(
гг г э
Порядок полученного выражения (2) можно понизить, раскрыв скобки подкоренного выражения и разделив числитель и знаменатель на УН- +Xr S2. При этом примем во внимание, что
Х2 XS + Х1Хт (Х2 + Хт)Х5 - XmXS +
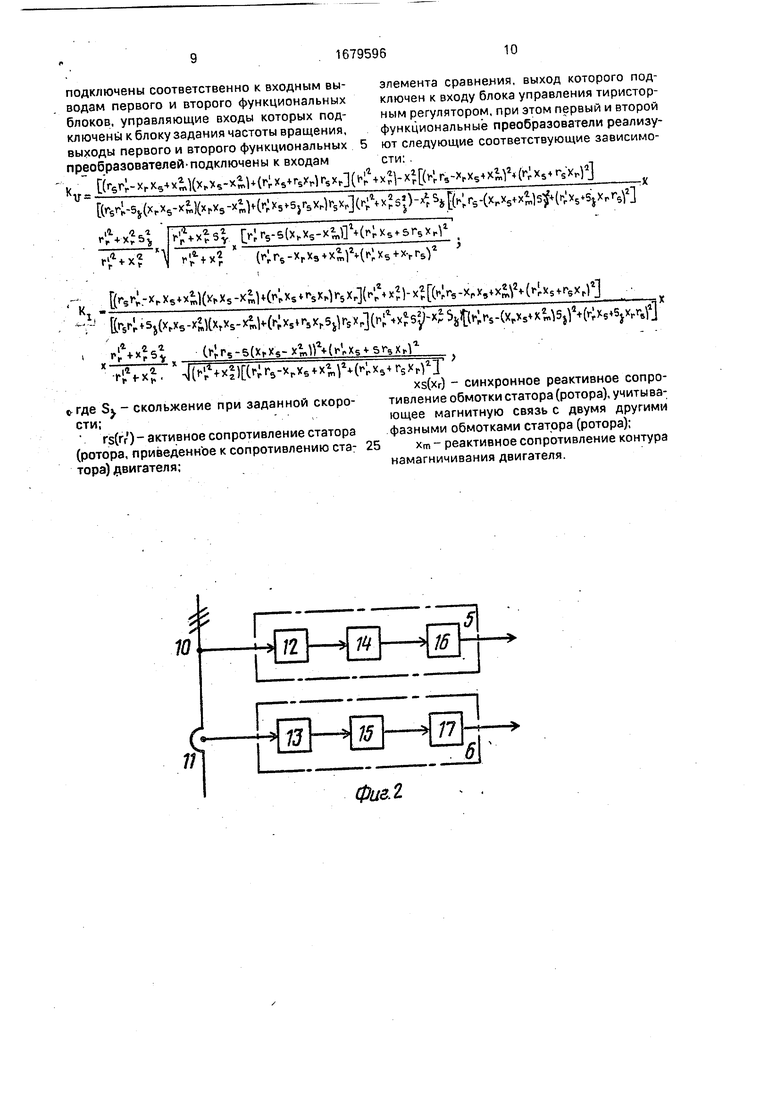
ры 12 и 13 низких частот и выпрямители 14 и 15 соединены с входами фильтров 16 и 17 низких частот, чьи выходы служат соответственно выходами датчиков 5 и 6 напряжения и тока.
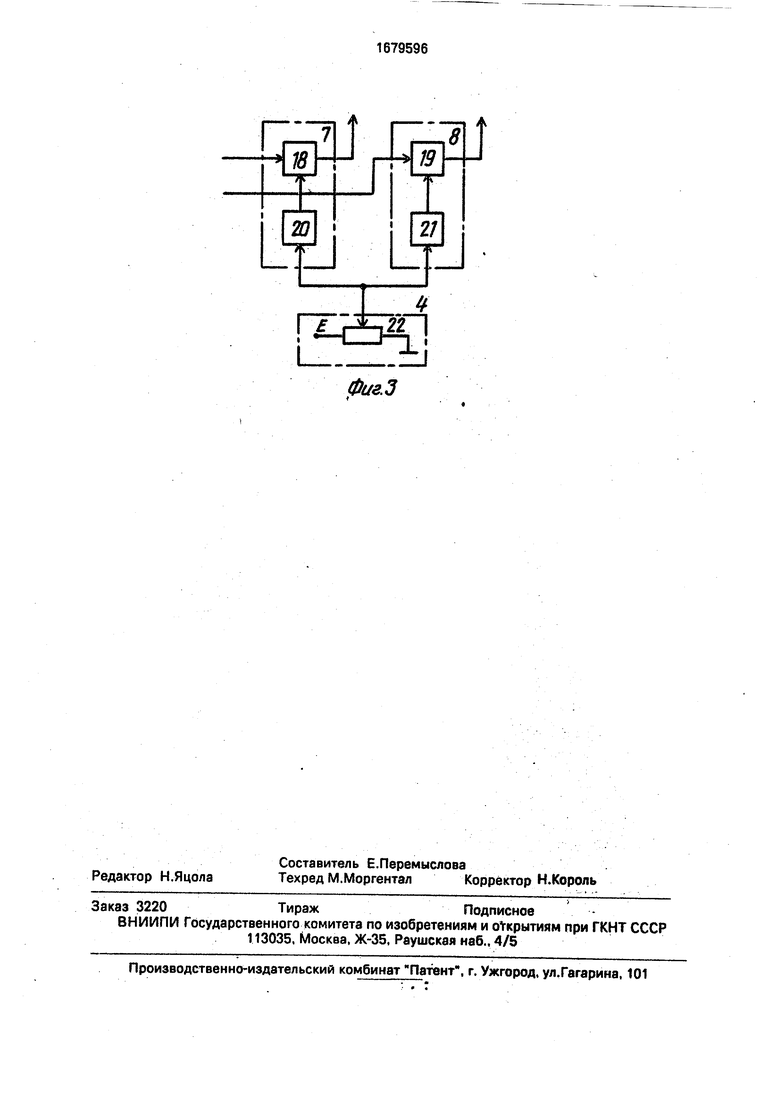
Функциональные блоки 7 и 8 содержат
блоки умножения 18 и 19, а также блоки 20 и 21 нелинейного преобразования (фиг.З), Входы блоков 7 и 8 являются первыми входами блоков 18 и 19 умножения, вторые
входы которых соединены соответственно с выходами блоков 20 и 21 нелинейного преобразования, Входы блоков 20 и 21 нелинейного преобразования образуют управляющие входы блоков 7 и 8. Блоки 18
и 19 умножения могут быть выполнены на основе аналоговых перемножителей серии 525ПС2. Блок 4 задания частоты вращения может быть реализован в виде задающего потенциометра 22 на основе схемы замещения асинхронного двигателя в результате следующих преобразований.
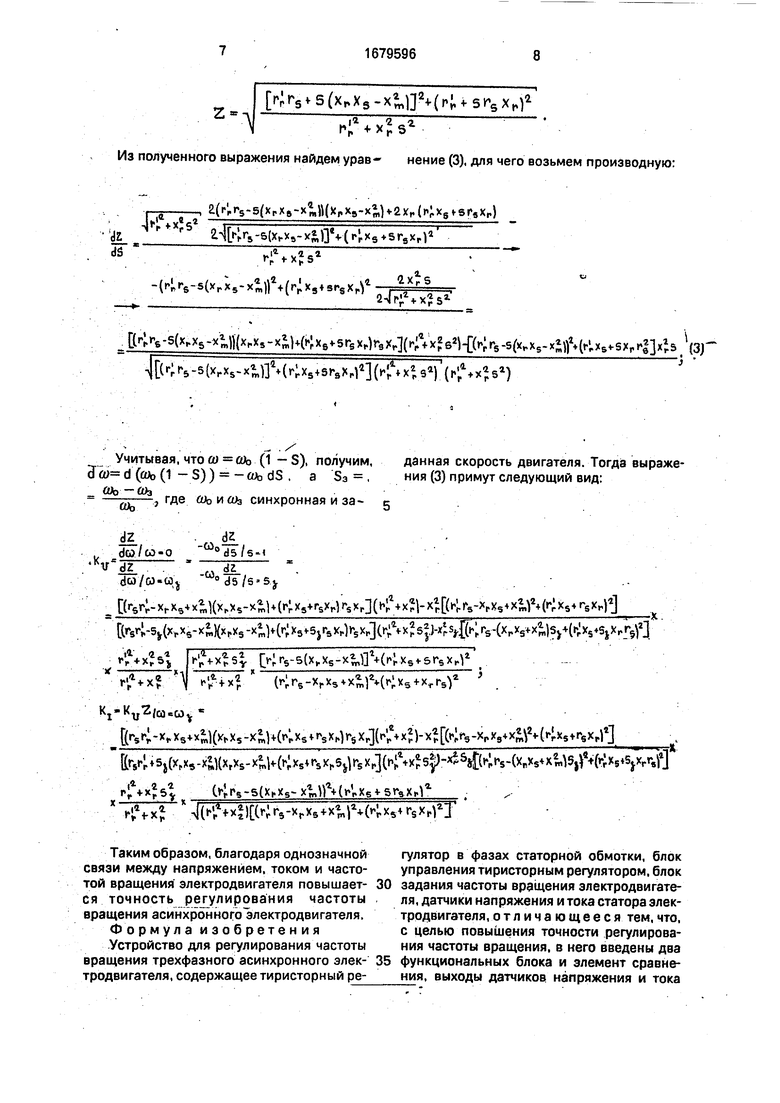
Найдем комплексное сопротивление двигателя
0)
r
-/5
xm - реактивное сопротивление контура намагничивания двигателя;
S - скольжение двигателя.
Домножим числитель и знаменатель полученного выражения на сопряженное знаменателю выражение:
(2)
30 Найдем модуль этого выражения:
+ Хт)хт Хт2 Xrxs - Хт2 Тогда
„ K4 Zsrsr,(x,.rJxi e1x;i.
или, сгруппировав члены числителя:
z f + srsX,,)1
Из полученного выражения найдем урав- нение (3), для чего возьмем производную: ., Ј(r rp5-5(xrx5-x,))()CpXs-x)2yP(p;xs srgXr)
№
v«,2
tXfS (xt.x a-K QV(p rxa,xPl« T ds
rt
-(r|.r6-5(yrX5.X))44(r;Xe4SrsXr ea.
.I
x; 5
(rX-s(xrx5-x)(xrx5-xЈMxs srsxJ
(r;r5-5(xrx5.x)f,(r;x5+srsxrl2(%x2rsa))
- X
Учитывая, что ft) ctfc (1 - S), получим, данная скорость двигателя. Тогда выраже- сГй d (ftte (1 - S) ) - Wo dS , a S3 , ния (З) примут следующий вид:
(Оо -(Оэ
, где Шоишз синхронная и за- g
iz,. di
dQ/CO-0 W°d5/5-«
4 К
v JLM L
dQ/W-Ы °d5/6 5j
x Pir
. (..Xs-x bKxs sXHrsxOCh x x X-XrXs x Kxs.rsX.)1 lvi-5(xrxe.x XxfX5-x(p;x9 s/5Xr)hsxJ(x s5bxtPs
rVSxbt 0-;г5-5(х,х5-хиГЧр;х5 5Г5Х(.. r r4 1 (rX-x. + .
K1-KU Z;CU.C0
(г5г;-х,х5.х х5-х Кх г3хИг5хг((р:г9-хРх3.х Ч{ и5 г5хИг
ttr/t5j(x,xe-x«Kxrx,..fr;x,i4K1,(r.(x
..r5-s(X,...
4 %x )Wrs-4Xs x m)4(r x6+rsx,rJ
Таким образом, благодаря однозначнойгулятор в фазах статорной обмотки, блок
связи между напряжением, током и часто-управления тиристорным регулятором, блок
той вращения электродвигателя повышает- 30задания частоты вращения электродвигатеся точность регулирования частотыля, датчики напряжения и тока статора элеквращения асинхронного электродвигателя,тродвигэтеля, отличающееся тем, что,
Формула изобретенияс целью повышения точности регулироваУстройство для регулирования частотыния частоты вращения, в него введены два
вращения трехфазного асинхронного элек- 35функциональных блока и элемент сравнетродвигателя. содержащее тиристорный ре-ния, выходы датчиков напряжения и тока
ea
x; 5
подключены соответственно к входным вы-элемента сравнения, выход которого подводам первого и второго функциональныхключей к входу блока управления тиристор- блоков, управляющие входы которых под-ным регулятором, при этом первый и второй ключены к блоку задания частоты вращения,функциональные преобразователи реализу- выходы первого и второго функциональных5 ют следующие соответствующие зависимо- преобразователей-подключены к входамсти:.
Ktf ()yXmU S-XmU(гс
fo -VxrXs-x xpXa-x HrJXs jrsXplV,,
КЧх 5 г;г5-5(ХьХ5- и1Уг;х5 5Г5хИг . 1 r-VSy Кг5-ХРХ9 + х)
гк 1)() .
.1а. „4,- Ч
1 р;+х;5;
х
р
Кг5-5(ХгХ5-ХгтП(-Ух5 5Г5хИг
ЧЧх. 4(Vxt)Wr5-xPxs,x 4Kx5+rsx,fl
xs(xr) - синхронное реактивное сопро где Si - скольжение при заданной скоро- тивление обмотки статора (ротора), учитыва- сти; ющее магнитную связь с двумя другими
rs(rr) активное сопротивление статора фазными обмотками статора (ротора); (ротора, приведенное к сопротивлению ста- 25 хт - реактивное сопротивление контура тора) двигателя;намагничивания двигателя.
р
Фие.З
| Устройство для регулирования скорости асинхронных коротко-замкнутых двигателей | 1973 |
|
SU570968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Титце У.Шенк Г | |||
| Полупроводниковая схемотехника | |||
| - М.: Мир, 1982 | |||
| „ | |||
