Изобретение относится к испытаниям электрических машин и может быть использовано для определения электромагнитных параметров наземных и погружных асинхронных электродвигателей с короткозамкнутым ротором на предприятиях по ремонту электрооборудования и непосредственно на площадках нефтедобывающих скважин.
Известно, что после ремонта электромагнитные параметры асинхронных электродвигателей (АД) изменяются. Причинами таких изменений являются неоднородность магнитных свойств рулонной электротехнической стали, из которой штампуются листы для пакетов статора, неравномерность рабочего воздушного зазора в АД из-за несоосности расположения ротора относительно статора и отклонений от прямолинейности внутренней поверхности статора по его длине, а также действие технологических факторов, например нестабильность характеристик оборудования и инструмента при выполнении операций штамповки, резки, механообработки, термообработки и др.
В этой связи актуально определение электромагнитных параметров АД для послеремонтной оценки технического состояния электродвигателей. По ним рассчитываются пусковые, рабочие и механические характеристики АД, определяются энергетические показатели, оценивается работоспособность АД в конкретных условиях эксплуатации.
Существуют различные способы определения электромагнитных параметров АД. Известен способ определения параметров АД по каталожным данным (Вольдек А.И., Попов В.В. Электрические машины. Машины переменного тока. Изд-во Питер, 2010. - 543 с.; Мощинский Ю.А., Беспалов В.Я., Кирякин А.А. Определение параметров схемы замещения асинхронной машины по каталожным данным // Электричество. - 1998. - №4. - С. 39-42). Недостатком способа является низкая точность, обусловленная тем, что каталожные данные АД могут существенно отличаться от реальных параметров, которые индивидуальны для каждого конкретного электродвигателя.
Известны также способ определения электромагнитных параметров АД на основе опыта холостого хода и короткого замыкания (ГОСТ 7217-87 Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний; RU 2391680 C1, МПК G01R 31/34, заявл. 15.12.2010, опубл. 10.06.2010); способ, использующий экспериментальные данные при различной нагрузке (Сивокобыленко В.Ф., Ткаченко C.H. Определение параметров схемы замещения глубокопазных асинхронных электродвигателей на основе экспериментальных данных // Електромеханiчнi i енергозберiгаючи системи. Випуск 3/2012 (19); итерационные способы на основе фильтра Калмана, искусственных нейронных сетей, нечеткой логики, генетического алгоритма (RU 2502079 C1, МПК G01R 31/34 (2006. 01), заявл. 27.07.12, опубл. 20.12.13); способ питания АД от полигармонического источника (Родькин Д.И., Калинов А.П., Ромашихин Ю.В. Эффективность метода энергодиагностики параметров двигателей переменного тока // Электроприводы переменного тока: Труды международной 14 НТК, Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2007. - С. 273-278); способ идентификации параметров АД средствами преобразователей частоты (Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО Ивановский государственный технический университет.- Иваново, 2008. - 298 с.).
Реализация этих способов на поверхности, в частности на ремонтных предприятиях и на площадках нефтедобывающих скважин, сложна, не технологична и не обеспечивает необходимой точности, т.к. требует сопряжения АД со специальными нагрузочными устройствами, применения дополнительного оборудования, осуществления набора тестовых режимов, либо наличия специализированных стендов, которыми оснащаются предприятия, выпускающие АД (Стенд приемосдаточных и периодических испытаний погружных асинхронных электродвигателей с нагрузкой до 160 кВт. http://www.novоmet.ru).
Использованию указанных способов в нефтедобывающих скважинах при работе погружных электродвигателей на глубинах спуска от 1-го до 3-х км в комплекте с электроцентробежным насосом препятствуют наличие многокилометровой электропитающей кабельной линии и промыслового повышающего трансформатора.
Существует способ аналогичного назначения (Рогозин Г.Г. Определение электромагнитных параметров машин переменного тока. Изд-во Технiка, 1992. - С. 17-27), позволяющий избежать указанных недостатков. По этому способу обмотку статора АД, расположенного на поверхности и питаемого постоянным током при заторможенном роторе, замыкают накоротко со стороны входного воздействия, регистрируют кривую затухания тока статора, переходят, используя преобразование Лапласа и интеграл Фурье к частотным характеристикам АД, и по ним определяют активные и индуктивные сопротивления обмотки статора, сопротивления эквивалентных контуров ротора и ветви намагничивания. Дополнительный переход к частотным характеристикам усложняет процесс определения электромагнитных параметров АД и увеличивает трудоемкость расчета.
Наиболее близким способом к заявляемому изобретению по совокупности признаков и достигаемым результатам является способ определения индуктивности рассеяния фазы обмотки статора асинхронного электродвигателя и устройство для его реализации (RU 2422839 C1, МПК G01R 27/26, заявл. 22.10.09, опубл. 27.06.11), не требующие перехода к частотным характеристикам. По этому способу измеряют постоянное напряжение U0 и ток в обмотке статора, соединенной по трехфазной схеме, замыкают накоротко при неподвижном роторе обмотку статора, измеряют значение производной затухающего тока статора (di1/dt)t=0 в начальный момент времени переходного процесса и вычисляют значение индуктивности рассеяния фазы обмотки статора асинхронного двигателя  где k - коэффициент, зависящий от схемы соединения фаз обмотки статора.
где k - коэффициент, зависящий от схемы соединения фаз обмотки статора.
Способ-прототип позволяет определять только индуктивность рассеяния фазы обмотки статора АД и не позволяет определять электромагнитные параметры ротора и магнитопровода АД, что является его недостатком.
Техническая задача предлагаемого изобретения состоит в увеличении определяемых электромагнитных параметров АД и в расширении арсенала средств аналогичного назначения.
Поставленная задача решена за счет того, что в способе определения индуктивности рассеяния фазы обмотки статора асинхронного электродвигателя, по которому измеряют постоянное напряжение U0 и ток в обмотке статора, соединенной по трехфазной схеме, замыкают накоротко при неподвижном роторе обмотку статора, измеряют значение производной (di1/dt)t=0 затухающего тока статора в начальный момент переходного процесса, вычисляют значение индуктивности рассеяния фазы обмотки статора где k - коэффициент, зависящий от схемы соединения фаз обмотки статора, согласно изобретению измерение производной (di1/dt)t=0 осуществляют используя оцифрованную переходную характеристику i1(t) затухающего тока статора в виде массива его мгновенных значений, аппроксимируют огибающую этой характеристики выражением 
 , определяют начальные токи I1, I2, I3 и постоянные времени Т1, Т2, Т3 экспонент соответственно пологого, крутого и сверхпереходного участков характеристики i1(t), а также интеграл
, определяют начальные токи I1, I2, I3 и постоянные времени Т1, Т2, Т3 экспонент соответственно пологого, крутого и сверхпереходного участков характеристики i1(t), а также интеграл  , по измеренным и определенным данным вычисляют электромагнитные параметры двигателей: активное сопротивление обмотки статора
, по измеренным и определенным данным вычисляют электромагнитные параметры двигателей: активное сопротивление обмотки статора
R1=(U0/I0),
где I0 - постоянный ток в обмотке статора, U0 - постоянное напряжение, приложенное к обмотке статора до гашения магнитного поля,
индуктивность намагничивания АД
активное сопротивление обмотки ротора, приведенное к статору
индуктивность обмотки ротора, приведенную к статору

сопротивление активных потерь в магнитопроводе АД
Предлагаемая последовательность операций, отличающаяся от известной и не применявшаяся ранее, позволяет получить новый технический результат, который заключается в возможности определения не только индуктивности рассеяния Lф фазы обмотки статора АД, но и активных сопротивлений R1 и  обмоток статора и ротора, индуктивности рассеяния обмотки ротора
обмоток статора и ротора, индуктивности рассеяния обмотки ротора  , индуктивности намагничивания АД Lm, и сопротивления активных потерь в магнитопроводе Rm, что способствует в свою очередь расширению арсенала средств аналогичного назначения.
, индуктивности намагничивания АД Lm, и сопротивления активных потерь в магнитопроводе Rm, что способствует в свою очередь расширению арсенала средств аналогичного назначения.
В сравнении с другими способами важным является тот результат, что все операции выполняются при неподвижном роторе, т.е. без сопряжения АД с синхронным двигателем, или с механической нагрузкой. Это упрощает реализацию способа на ремонтных предприятиях и на поверхности кустовых площадок нефтедобывающих скважин.
Изобретение поясняется чертежами:
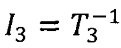
фиг. 1 - классическая Т-образная схема замещения асинхронного электродвигателя с параллельным контуром намагничивания при неподвижном роторе;
фиг. 2 - эквивалентные схемы АД для пологого (а), крутого (б) и сверхпереходного (в) участков переходной характеристики затухания тока статора;
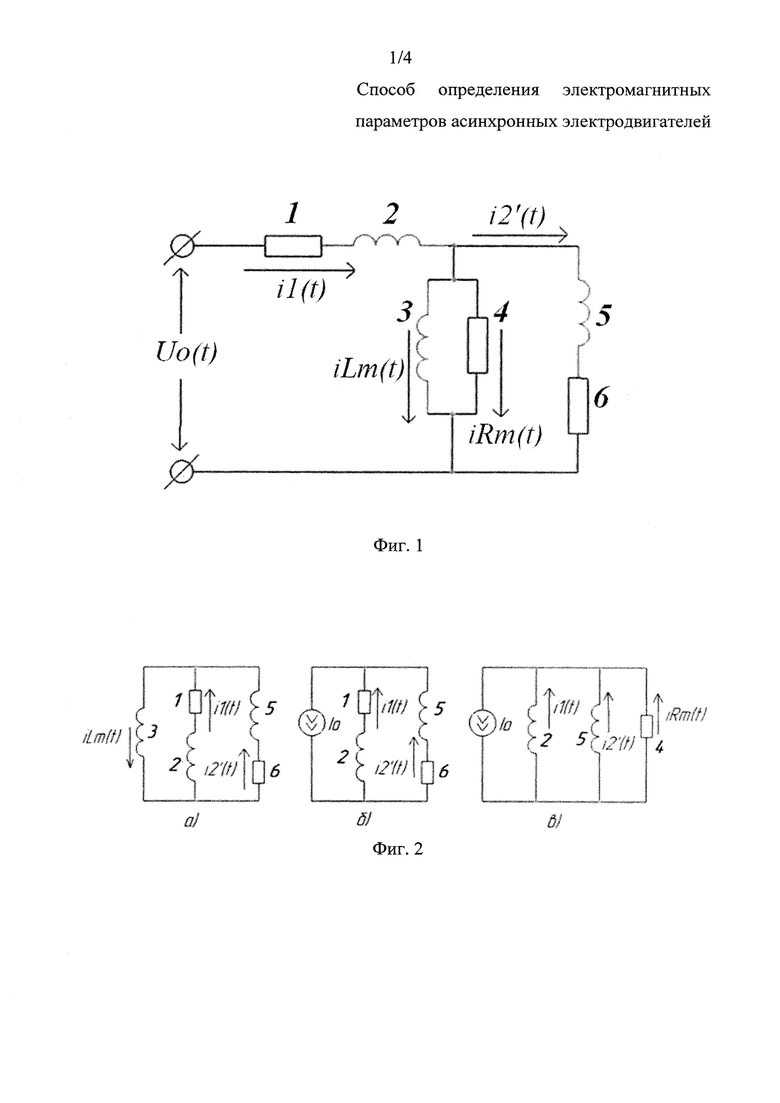
фиг. 3 - схема формирования тестовой переходной характеристики i1(t) в программной среде Multisim 12;
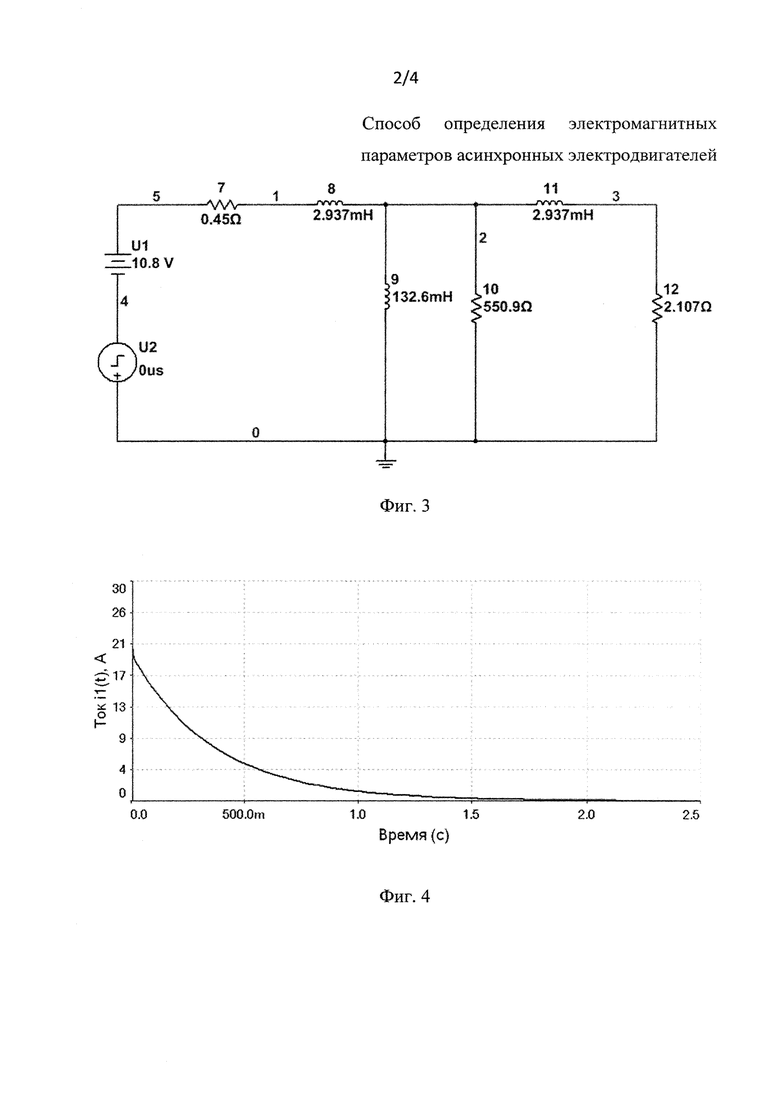
фиг. 4 - переходная характеристика затухания i1(t), сформированная средствами Multisim 12;
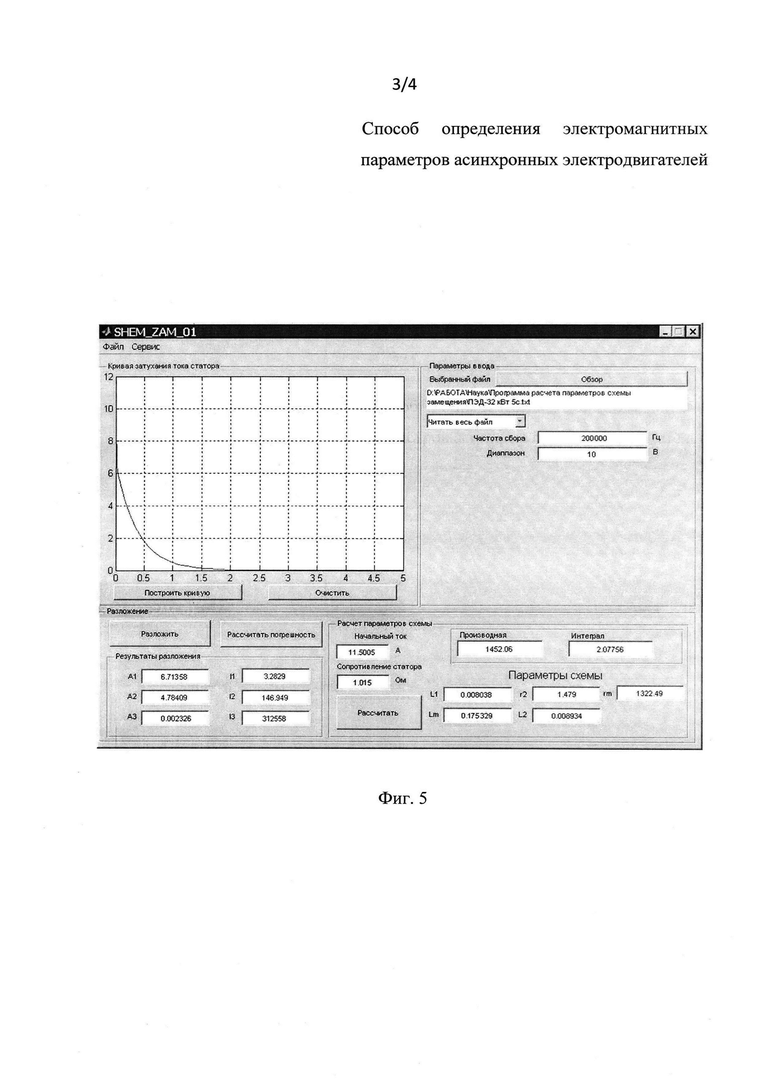
фиг. 5 - интерфейс обрабатывающей программы SHEM_ZAM 01.
На фиг. 1 и фиг. 2 резисторы 1, 4, 6 имеют сопротивления R1, Rm, R2', равные соответственно активному сопротивлению обмотки статора АД, сопротивлению активных потерь в магнитопроводе АД, активному сопротивлению обмотки ротора, и моделируют потери энергии на тепло в обмотке статора, в стали магнитной системы АД и в стержнях короткозамкнутой обмотки ротора. Индуктивные элементы 2, 5, 3 имеют индуктивности L1, L2', Lm, равные индуктивности рассеяния обмотки статора АД, индуктивности рассеяния обмотки ротора, индуктивности намагничивания, и моделируют потери энергии на проведение магнитных потоков соответственно по путям рассеяния магнитных систем статора, ротора и расход электроэнергии на создание основного рабочего магнитного потока АД. Действие индуктивного элемента 3 на быстром и сверхпереходном участках кривой затухания i1(t) отражает на фиг. 2,б и фиг. 2,в источник тока Ιο. Параметры R2' и L2' обмотки ротора приведены к обмотке статора. Действие элементов Li…Ln, Ri…Rn, присутствующих на эквивалентной схеме АД, используемой в прототипе (фиг. 6 приложение), как известно, проявляется незначительно и далее не учитывается.
Эквивалентные схемы (фиг. 2,а, б) соответственно для пологого и крутого участков кривой затухания тока статора АД построены на базе соотношений Rm>>R1, R1>>Rконт+Rпр+Rдт, Rm>>, Lm>>L1 и Lm>>, позволяющих без какой-либо значительной ошибки пренебречь:
- влиянием сопротивления Rm, сопротивлением контактов Rконт, проводников Rпр, создающих режим к.з. на стороне входных зажимов АД и сопротивлением датчика тока Rдт в этой к.з. цепи на постоянную времени Т1 (фиг. 2,а) экспоненты, аппроксимирующей пологий участок огибающей характеристики i1(t), который обусловлен процессами гашения энергии магнитного поля АД на сопротивлениях R1 и ;
- влиянием индуктивности Lm и сопротивлений Rm, Rконт, Rпр, Rдт на постоянную времени экспоненты Т2, (фиг. 2,б) аппроксимирующей крутой (миллисекундный) участок огибающей переходной характеристики i1(t), который связан с электромагнитными процессами проникновения магнитного поля рассеяния обмотки статора АД в заторможенный ротор.
Основанием для эквивалентной схемы на фиг. 2,в являются неравенства 
 справедливые на сверхпереходном (десятки микросекунд) участке огибающей характеристики i1(t) и соотношения Lm>>L1 и Lm>>, которые дают возможность с очень хорошим приближением не учитывать влияние индуктивности Lm и сопротивлений R1 и R2 на величину постоянной времени T3 сверхпереходной аппроксимирующей экспоненты кривой затухания тока i1(t).
справедливые на сверхпереходном (десятки микросекунд) участке огибающей характеристики i1(t) и соотношения Lm>>L1 и Lm>>, которые дают возможность с очень хорошим приближением не учитывать влияние индуктивности Lm и сопротивлений R1 и R2 на величину постоянной времени T3 сверхпереходной аппроксимирующей экспоненты кривой затухания тока i1(t).
Как показывают расчеты, отличие значений постоянных времени Т1, Т2, Т3, определенных аналитически по упрощенным схемам замещения на фиг. 2,а, 2,б, 2,в от найденных для Т-образной эквивалентной схемы компьютерными методами не превышает 2,5%, что можно считать приемлемым.
Для обоснования заявляемого способа представим напряжение u0(t) следующим выражением (фиг. 1):

Проинтегрируем (1), учитывая, что при t≥0 напряжение u0(t)=0

Так как i1(0)=im(0)=I0 и i1(∞)=im(∞)=0, получаем соотношение

из которого с учетом равенства (RU 2422839 С1, МПК G01R 27/26, заявл. 22.10.09, опубл. 27.06.11)

определяется индуктивность намагничивания АД

где k=2/3 при соединении фаз АД по схеме неполной звезды a+b⎜⎜с.
Сопротивление обмотки статора вычисляется по результатам измерений

Уравнения (1), (3), (4), (5) получены с помощью правил и законов теоретической электротехники без использования упрощающих предположений и допущений, приводящих к потерям его точности. В соответствии с уравнением (4), эквивалентной схемой фиг. 2,а и соотношением  результирующая постоянная времени Т1 находится как
результирующая постоянная времени Т1 находится как

Из данного уравнения определяется приведенное к статору активное сопротивление обмотки ротора АД

Индуктивность рассеяния обмотки ротора, приведенная к статору АД, находится по эквивалентной схеме (фиг. 2,б)

Сопротивление активных потерь в магнитопроводе АД выражается (фиг. 2,в) через постоянную времени сверхпереходного участка кривой затухания i1(t) тока статора

При реализации способа определения электромагнитных параметров АД осуществляют следующие действия. Измеряют постоянное напряжение U0 и ток I0 в обмотке статора, соединенной по трехфазной схеме. Замыкают накоротко при неподвижном роторе обмотку статора. Измеряют значение производной затухающего тока статора (di1/dt)t=0 в начальный момент переходного процесса гашения магнитного поля. Вычисляют значение индуктивности рассеяния фазы обмотки статора асинхронного двигателя,  где k - коэффициент, зависящий от схемы соединения фаз обмотки статора. Измерение производной согласно изобретению производят по оцифрованной переходной характеристике i1(t), представляющей собой массив мгновенных значений затухающего тока статора. Дополнительно аппроксимируют огибающую оцифрованной переходной характеристики i1(t) выражением
где k - коэффициент, зависящий от схемы соединения фаз обмотки статора. Измерение производной согласно изобретению производят по оцифрованной переходной характеристике i1(t), представляющей собой массив мгновенных значений затухающего тока статора. Дополнительно аппроксимируют огибающую оцифрованной переходной характеристики i1(t) выражением

Определяют по массиву мгновенных значений тока i1(t) постоянные времени Т1, Т2, Т3 и начальные токи I1, I2, I3 экспонент соответственно пологого, крутого и сверхпереходного участков кривой i1(t), а также интеграл  . Вычисляют по формулам (4)-(8) электромагнитные параметры АД.
. Вычисляют по формулам (4)-(8) электромагнитные параметры АД.
Для получения оцифрованной переходной характеристики затухающего тока статора АД i1(t) разработана мобильная установка «Регистратор переходных характеристик РПХ-20», сертифицированная в РОССТАНДАРТ, Федеральном Бюджетном Учреждении «Омский Центр Стандартизации и Метрологии», (АТТЕСТАТ №0573 от 09.10.2014 г.).
Для измерения производной (di1/dt)t=0, определения постоянных времени Т1, Т2, Т3, и начальных токов I1, I2, I3 аппроксимирующих экспонент и вычисления электромагнитных параметров АД разработана программа SHEM_ZAM 01, реализованная в системе Matlab. В программе используются функции регрессивного анализа и начальные условия

вытекающие из выражения (9) и связывающие между собой начальные токи I1, I2, I3 с постоянным током I0 и производную (di1/dt)t=0 с постоянными времени Т1, Т2, Т3.
Новой в заявляемом способе является возможность определения электромагнитных параметров АД в широком диапазоне режимов работы, включая нелинейные режимы, вызванные насыщением магнитной системы АД и эффектом вытеснения тока в глубокопазных электродвигателях. Эта возможность реализуется путем изменения величины постоянного тока I0. Режимы такого рода характерны для погружных АД.
Новой является также возможность определения не только индуктивности рассеяния Lф, фазы обмотки статора АД, но и электромагнитных параметров ротора и магнитопровода АД непосредственно по оцифрованной переходной характеристике i1(t) затухания тока статора при заторможенном роторе без привлечения частотных характеристик АД и дополнительных операций для перехода от временных зависимостей к частотным. Эту возможность дает аппроксимация огибающей переходной характеристики i1(t) суммой трех экспонент, определение постоянной времени Т3 сверхпереходной аппроксимирующей экспоненты, интеграла  измерение производной (di1/dt)t=0 и применение этих данных в уравнениях (4), (6), (7), (8) для определения электромагнитных параметров АД. Вышеизложенное позволяет сделать вывод о соответствии изобретения критерию «новизна».
измерение производной (di1/dt)t=0 и применение этих данных в уравнениях (4), (6), (7), (8) для определения электромагнитных параметров АД. Вышеизложенное позволяет сделать вывод о соответствии изобретения критерию «новизна».
Из литературных источников и патентного поиска установлено, что совокупность признаков, перечисленных в отличительной части формулы изобретения, не применялась ранее для определения электромагнитных параметров АД и не вытекает для специалиста явным образом из известного уровня техники, что позволяет сделать вывод о соответствии критерию «изобретательский уровень».
Оценка эффективности и достоверности программы определения параметров аппроксимирующей функции (9), включенных в формулу заявляемого изобретения, проведена путем формирования тестовых переходных характеристик i1(t) погружных АД типов ЭД(Т)12-117-380, 1ЭД(Т)45-117-1000, 1ЭД(Т)63-117-1000, ЭД(Т)90-117-1300 и наземных АД типов 4А80В4УЗ, 4А160М4УЗ. Характеристики получены моделированием режима внезапного короткого замыкания в классических Т-образных эквивалентных схемах данных АД, реализованного в программном пакете Multisim 12 при постоянном токе в обмотке статора I0, равном номинальному намагничивающему току электродвигателей.
Параметры элементов классической Т-образной схемы замещения (фиг. 1) для наземных АД типов 4А80В4УЗ, 4А160М4УЗ взяты в относительных единицах из справочника (Асинхронные электродвигатели серии 4А: справочник / А.Э. Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболенская. - М.: Энергоатомиздат, 1982. - 504 с.) и при моделировании переведены в именованные единицы. Значения резистивных и индуктивных элементов Т-образной схемы замещения для погружных АД определены из технических условий на их предельно-допустимые параметры (ТУ3381-026-21945400-97 Электродвигатели погружные асинхронные теплостойкие) с использованием методики, имеющейся в этих технических условиях.
Схема формирования тестовой переходной характеристики i1(t) затухания тока статора АД в программной среде Multisim 12 (фиг. 3) содержит схемотехнические резисторы 7, 10, 12, представляющие элементы 1, 4, 6; схемотехнические индуктивности 8, 9, 11, представляющие элементы 2, 3, 5; схемотехнический источник U1 представляющий источник напряжения U0 и задающий начальный постоянный ток I0 в схемотехнической модели обмотки статора АД. Значения элементов на фиг. 3 приведены для АД типа 1ЭД (Т) 63-117-1000. Ток I0=24 А.
При запуске моделирования схемотехнический источник ступенчатого напряжения U2 формирует перепад 10,8 В, который нейтрализует действие постоянного напряжения U1, в результате чего на стороне входных зажимов эквивалентной схемы (фиг. 3) создается режим короткого замыкания. При этом формируется кривая затухания тока статора i1(t), протекающего по элементам 7, 8, U1, U2, которую можно вывести на экран (фиг. 4) с помощью редактора Grapher View программы Multisim 12.
По окончании цикла моделирования полученный тестовый массив мгновенных значений i1(t) АД передается программе SHEM_ZAM для определения параметров аппроксимирующих экспонент (9). В алгоритмах определения параметров экспонент программы SHEM_ZAM используется инструмент Curve Fitting Toolbox пакета Matlab, имеющий графический интерфейс. Обработка тестовых массивов данных для погружных и наземных АД проводится в опциях регрессионного анализа с учетом начальных условий (10) по алгоритму Levenberg-Marquardt с использованием инструмента Curve Fitting Toolbox.
В табл. 1 представлены результаты расчета параметров экспонент функции (9), аппроксимирующей тестовые переходные характеристики наземных и погружных электродвигателей.
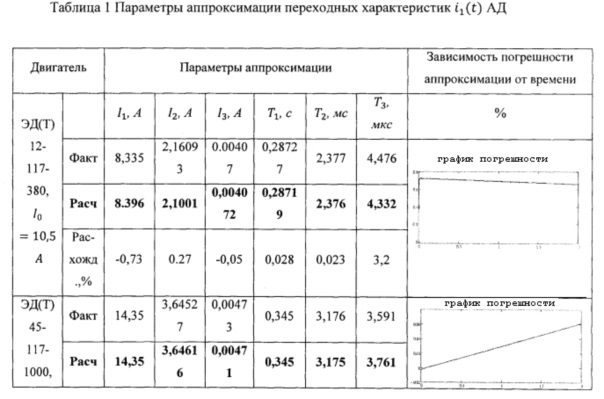
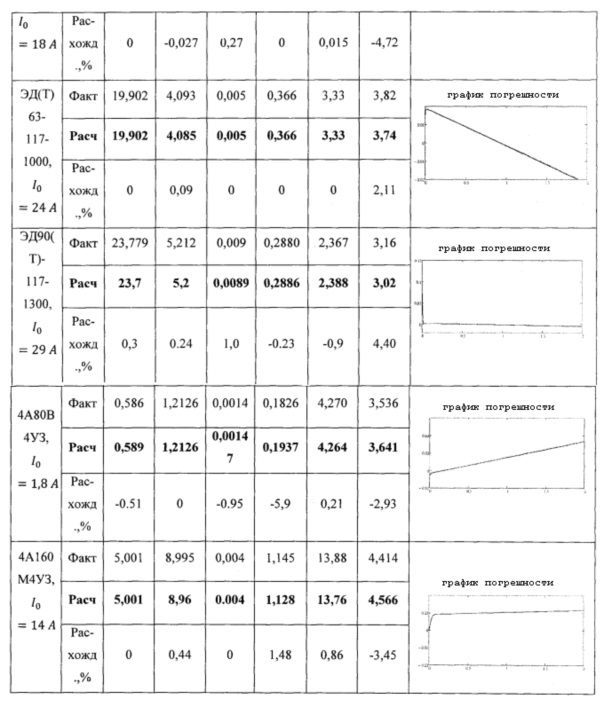
Там же представлены фактические значения этих параметров. Они получены расчетным путем по уравнениям переходных характеристик затухания тока статора тестируемых АД, составленным для их Т-образных схем замещения, аналогичных схеме замещения АД типа 1ЭД (Т) 63-117-1000 на фиг. 3. Уравнения составлены в операторной форме записи с использованием преобразования Лапласа.
В табл. 1 приведены также временные зависимости погрешности аппроксимации

переходных характеристик АД, построенные с помощью программы SHEM_ZAM_01 и расхождения в % между фактическими величинами параметров Т1, Т2, Т3, I1, I2, I3 и их рассчитанными значениями. Наибольшие расхождения (до 5%) получены для постоянной времени Т3 сверхпереходного участка характеристики i1(t). Для остальных параметров аппроксимирующей функции (8) расхождения не превышают 1,5%, что можно считать приемлемым.
Экспериментальная проверка предлагаемого способа проводилась на погружном электродвигателе типа ПЭДН32 габарита 117М, мощностью 32 кВт с рабочим напряжением 1000 В. Электромагнитные параметры данного ПЭД (табл. 2) определены по экспериментальной механической характеристики в монографии «Электротехнологические установки насосной эксплуатации скважин» / А.Ю. Ковалев, Ю.З. Ковалев, А.С. Солодянкин. - Нижевартовск: Изд-во НГГУ, 2010. - 173 с. Экспериментальная механическая характеристика получена на стенде приемосдаточных и периодических испытаний ПЭД ОАО «Новомет-Пермь» (http://www.novomet.ru.).
Оцифрованная переходная характеристика затухания тока статора i1(t) данного ПЭД получена при номинальном намагничивающем токе I0=11,5A с помощью мобильной установки РПХ-20. Определение электромагнитных параметров ПЭД по переходной характеристике i1(t) проведено с помощью программы SHEM_ZAM 01 и представлено в табл. 2 и на интерфейсе программы (фиг. 5). Начальные токи аппроксимирующих экспонент обозначены на фиг. 5 как А1, А2, А3; постоянные времени экспонент представлены в неявном виде как 

 .
.
Из табл. 2 следует, что электромагнитные параметры ПЭДН32-117М-1000 определены с погрешностью, не превышающей 7,5%. Исключение составляет сопротивление ротора  , где отклонение достигает 11,1%. Все в целом показывает достаточную степень адекватности заявляемого способа определения электромагнитных параметров физическим процессам в АД.
, где отклонение достигает 11,1%. Все в целом показывает достаточную степень адекватности заявляемого способа определения электромагнитных параметров физическим процессам в АД.

Изобретение позволяет расширить арсенал технических средств аналогичного назначения, определять большее число электромагнитных параметров АД, а именно все параметры классической Т-образной схемы замещения, и может найти применение при контроле электромагнитных параметров АД после ремонтного обслуживания и на кустовых площадках нефтедобывающих скважин.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКТИВНОСТИ РАССЕЯНИЯ ФАЗЫ ОБМОТКИ СТАТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2422839C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ АСИНХРОННОЙ МАШИНЫ С ФАЗНЫМ РОТОРОМ | 2022 |
|
RU2785209C1 |
| Способ контроля успешности прямого пуска асинхронного двигателя | 2023 |
|
RU2827055C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| Способ определения частотной характеристики проводимости асинхронной машины | 1990 |
|
SU1780062A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ И РАБОЧИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ БЕЗ СОПРЯЖЕНИЯ С НАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2391680C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ И ИНДУКТИВНОСТИ РАССЕЯНИЯ ПЕРВИЧНОЙ ОБМОТКИ ТРАНСФОРМАТОРА НАПРЯЖЕНИЯ | 2012 |
|
RU2491559C1 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ВРЕМЕНИ КОРОТКОЗАМКНУТОГО РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2374752C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
Изобретение относится к измерительной технике и может быть использовано для определения электромагнитных параметров наземных и погружных асинхронных электродвигателей на предприятиях по ремонту электрооборудования и на площадках нефтедобывающих скважин. В известном способе определения индуктивности рассеяния фазы обмотки статора асинхронного электродвигателя измеряют постоянное напряжение U0 и ток в обмотке статора, соединенной по трехфазной схеме. Замыкают накоротко при неподвижном роторе обмотку статора. Измеряют значение производной (di1/dt)t=0 затухающего тока статора в начальный момент переходного процесса. Вычисляют значение индуктивности рассеяния фазы обмотки статора  где k - коэффициент, зависящий от схемы соединения фаз обмотки статора. Согласно изобретению измерение производной (di1/dt)t=0 осуществляют используя оцифрованную переходную характеристику i1(t) затухающего тока статора в виде массива его мгновенных значений. Дополнительно аппроксимируют огибающую этой характеристики выражением
где k - коэффициент, зависящий от схемы соединения фаз обмотки статора. Согласно изобретению измерение производной (di1/dt)t=0 осуществляют используя оцифрованную переходную характеристику i1(t) затухающего тока статора в виде массива его мгновенных значений. Дополнительно аппроксимируют огибающую этой характеристики выражением  Определяют начальные токи I1, I2, I3 и постоянные времени Т1, Т2, Т3 экспонент соответственно пологого, крутого и сверхпереходного участков характеристики i1(t), а также интеграл
Определяют начальные токи I1, I2, I3 и постоянные времени Т1, Т2, Т3 экспонент соответственно пологого, крутого и сверхпереходного участков характеристики i1(t), а также интеграл  По измеренным и определенным данным вычисляют электромагнитные параметры асинхронных электродвигателей. Технический результат заключается в увеличении определяемых электромагнитных параметров и в расширении арсенала средств аналогичного назначения. 5 ил., 2 табл.
По измеренным и определенным данным вычисляют электромагнитные параметры асинхронных электродвигателей. Технический результат заключается в увеличении определяемых электромагнитных параметров и в расширении арсенала средств аналогичного назначения. 5 ил., 2 табл.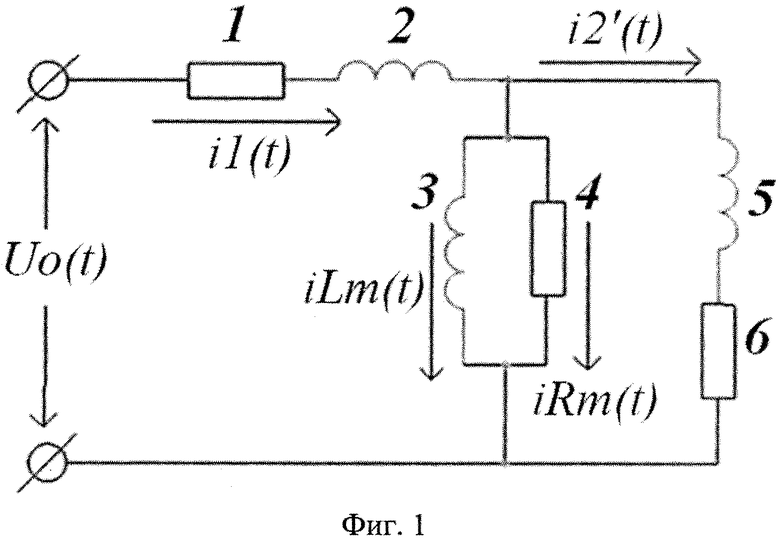
Способ определения электромагнитных параметров асинхронных электродвигателей, по которому измеряют постоянное напряжение U0 и ток в обмотке статора, соединенной по трехфазной схеме, замыкают накоротко при неподвижном роторе обмотку статора, измеряют значение производной затухающего тока статора в начальный момент переходного процесса гашения магнитного поля, вычисляют значение индуктивности рассеяния фазы обмотки статора асинхронного двигателя  , где k - коэффициент, зависящий от схемы соединения фаз обмотки статора, отличающийся тем, что измерение производной (di1/dt)t=0 осуществляют используя оцифрованную переходную характеристику затухающего тока статора i1(t) в виде массива его мгновенных значений, аппроксимируют огибающую этой характеристики выражением
, где k - коэффициент, зависящий от схемы соединения фаз обмотки статора, отличающийся тем, что измерение производной (di1/dt)t=0 осуществляют используя оцифрованную переходную характеристику затухающего тока статора i1(t) в виде массива его мгновенных значений, аппроксимируют огибающую этой характеристики выражением  , определяют начальные токи I1, I2, I3 и постоянные времени T1, T2, T3 экспонент соответственно пологого, крутого и сверхпереходного участков характеристики i1(t), а также интеграл
, определяют начальные токи I1, I2, I3 и постоянные времени T1, T2, T3 экспонент соответственно пологого, крутого и сверхпереходного участков характеристики i1(t), а также интеграл  , по измеренным и определенным данным вычисляют электромагнитные параметры двигателей: активное сопротивление фазы обмотки статора
, по измеренным и определенным данным вычисляют электромагнитные параметры двигателей: активное сопротивление фазы обмотки статора
R1=(U0/I0),
где I0 - постоянный ток в обмотке статора, U0 – постоянное напряжение, приложенное к обмотке статора до гашения магнитного поля,
индуктивность намагничивания АД
 -
- 
активное сопротивление обмотки ротора, приведенное к статору
индуктивность обмотки ротора, приведенную к статору
сопротивление активных потерь в магнитопроводе АД
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| JP 62042074 A, 24.02.1987 | |||
| US 6774664 B2, 10.08.2004. | |||

