Изобретение относится к медицинской технике, а менно к ортопедическим устройствам для выборочной тренировки силы мышц, и предназначенодля консервативного лечения начальных степеней сколиоза и нарушений осанки во фронтальной плоскости у детей и подростков.
Для контроля правильности осанки у детей с кифосколиозом известны устройства, выполненные в виде системы крепления на туловище ребенка контактного датчика и системы сигнализации, срабатывающей при нарушении правильной осанки. Эти устройства недостаточно эффективны, т.к. они предназначены преимущественно для контроля уже выработанной осанки и узкой направленности индикации только кифотического компонента деформации, который имеет место лишь у 25-30% больных сколиозом, не обеспечивая индикации соотношения биоэлектрической активности
мышц-антагонистов, участвующих в поддержании осанки.
Известна линейная электромиографическая система с биологической обратной связью, содержащая датчик в виде электродов, устанавливаемых на.коже над соответствующей мышцей, усилитель биопотенциалов, выполненный в виде дифференциального усилителя, соединенную с ним систему фильтров, нагруженных на оптический индикатор в виде многоканального осциллографа, и звуковой сигнализатор. Недостатки этой системы заключаются в недостаточной эффективности обучения поддержанию правильной осанки вследствие невозможности индикации соотношения биоэлектрической активности мышц-антагонистов из-за наличия только одного кана-. ла, и низкой наглядности обучения в связи с использованием непосредственно сигнала биоэлектрической активности мышц, отоvi
00
ю ел
|0
бражаемого на экране светолучевого осциллографа, плохо воспринимаемого детьми малого возраста и утомительного для глаз.
В качестве прототипа выбрано биологическое устройство обратной связи, содержащее усилитель биопотенциалов, систему фильтров, выпрямитель сигналов, нагруженный на визуальное указательное приспособление, выполненное в виде ряда последовательно расположенных определенным образом световых источников,
Недостатки прототипа заключаются в недостаточной эффективности обучения поддержанию правильной осанки вследствие невозможности индикации соотношения биоэлектрической активности мышц-антагонистов из-за наличия только одного канала, что удлиняет сроки обучения, и низкой наглядности обучения в связи с малой занимательностью средства индикации в виде светового табло, не позволяющего вносить в процесс лечения игровой момент, изменение световых сигналов на котором непосредственно не соотносится с реальной величиной деформации позвоночного столба у конкретного пациента и степенью ее исправления.
Цель изобретения - увеличение эффективности обучения поддержанию правильной осанки путем повышения наглядности индикации соотношения биоэлектрической активности мышц-антагонистов.
Поставленная цель достигается тем, что в устройство для лечения нарушений осанки, содержащее входной блок, выполненный в виде соединенных последовательно усилителя биопотенциалов и выпрямителя, электроды и систему индикации, введен дополнительный входной блок, на выходе которых дополнительно включены интеграторы, соединенные с выходом выпрямителя, блок вычитания с про- тивофазными входами которого соединены выходы входных блоков, блок программирования и блок управления средством индикации, содержащий по крайней мере один канал, каждый из которых выполнен в виде последовательно соединенных узла компенсации и ключевого усилителя мощности, нагруженного на соответствующий реверсивный электродби- гатель, кинематически связанный со средством индикации и соответствующим датчиком положения, при этом первый, второй и третий входы узла компенсации каждого канала блока управления соединен с выходами соответственно блока вычитания, блока программирования и датчика положения, а система индикации выполнена в виде модели гибкого позвоночного столба, образованного пружинистым элементом с укрепленными на нем позвонками, плечевым и тазовым поясами, нейтральные участки пружинистого элемейта прикреплены к перпендикулярным ему валам, связанным коромыслами, по крайней мере один из которых соединен с выходом редуктора с электродвигателем и установлен с возможностью осевого вра0 щения неподвижно, а остальные валы размещены в направляющих с возможностью осевого вращения и линейного перемещения перпендикулярно своих осей.
В варианте исполнения средство инди5 кации выполнено одноканальным, в котором к валам прикреплены средний и крайние нейтральные участки пружинистого элемента, при этом средний вал установлен неподвижно, а два крайних размещены
0 в направляющих, причем блок управления содержит один канал, узел компенсации которого выполнен в виде трехвходового сумматора, первый и второй входы первого из которых являются соответственно первым и
5 вторым входами канала, а выход соединен с первым входом второго сумматора, второй вход которого является третьим входом канала.
В другом варианте исполнения для
0 обеспечения индикации коррекции позвоночного столба соответственно особенностям его деформации средство индикации выполнено двухканальным, в нем к валам прикреплены верхний и нижний нейтраль5 ные участки пружинистого элемента, оба вала соединены через редукторы с соответствующими электродвигателями, а их коромысла связаны посредством жесткой тяги, равной суммарной длине обоих
0 коромысел, причем нижний вал установлен неподвижно, а верхний вал размещен в направляющих, при этом блок управления содержит два канала, нагруженных соответственно на первый и второй электро5 двигатели, первые и вторые входы которых объединены, а узлы компенсации выполнены в виде суммирующих умножителей, первый и второй суммирующие входы которых являются соответственно первым и вторым
0 входам каждого из каналов, а третие умножающие входы являются четвертыми входами каждого из каналов и соединены соответственно со вторым и третьим выходами блока программирования, и двухвхо5 довые сумматоры, первые входы которых соединены с выходами суммирующих умножителей, а вторые входы являются третьими входами каждого из каналов.
В варианте исполнения сумм,аторы, суммирующие умножители и блок вычитания выполнены на аналоговых ЬперацйФн- ных усилителях.
В другом варианте исполнения сумматоры, суммирующие умножители, блок вычитания и блок программирования выполнены на комбинационных цифровых схемах, а на выходах входных блоков и датчиков положения включены преобразователи аналог-код.
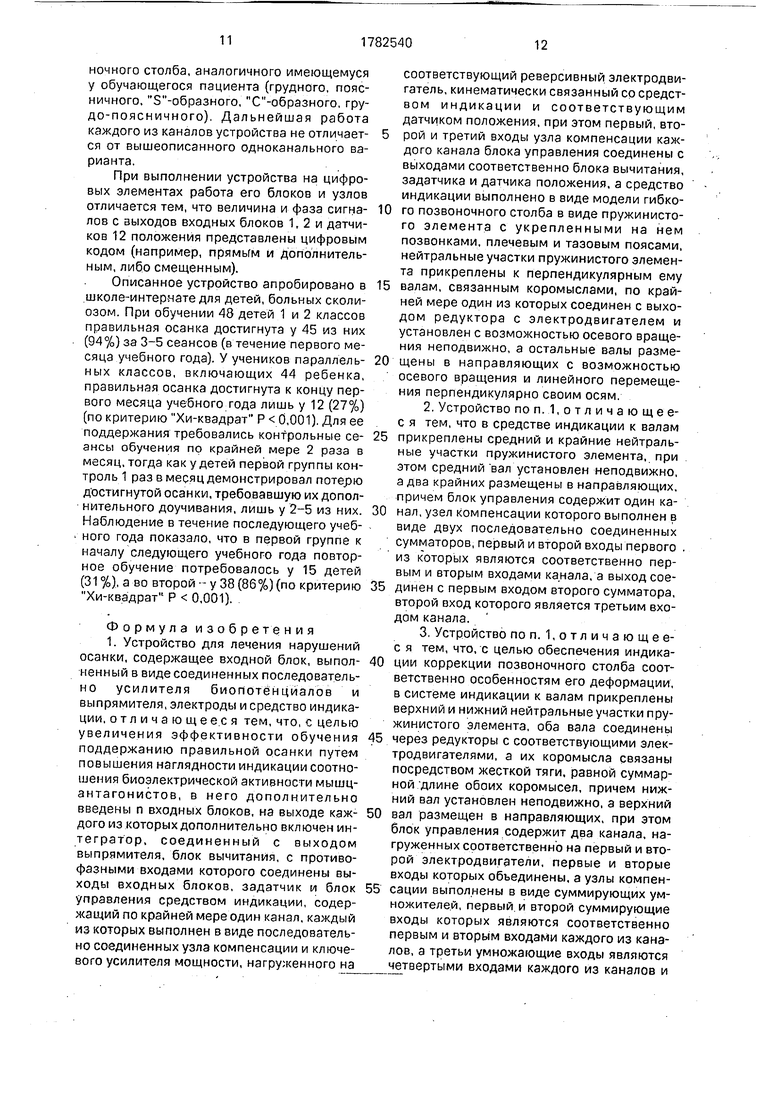
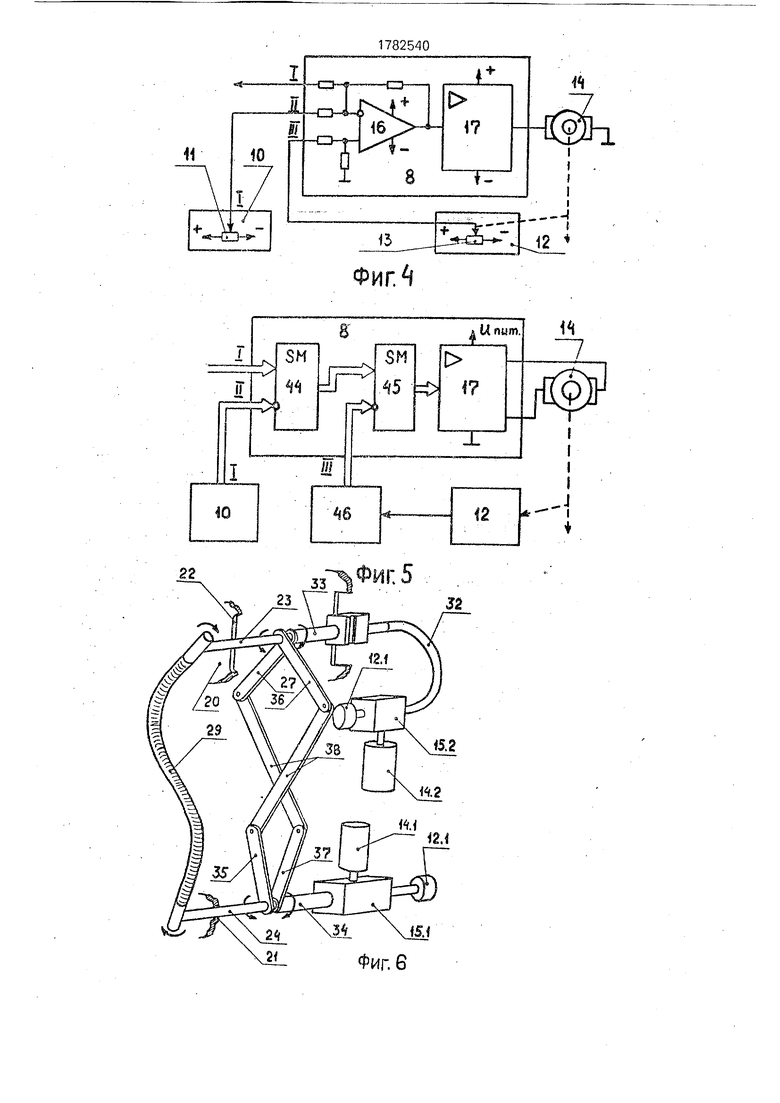
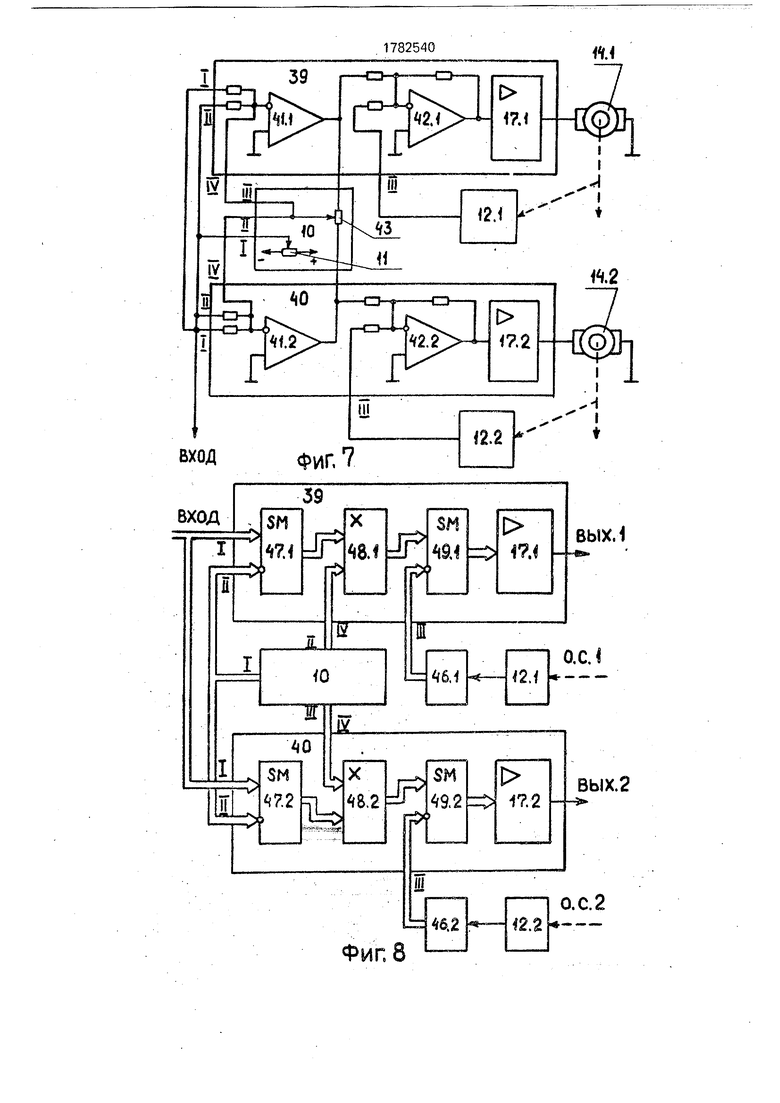
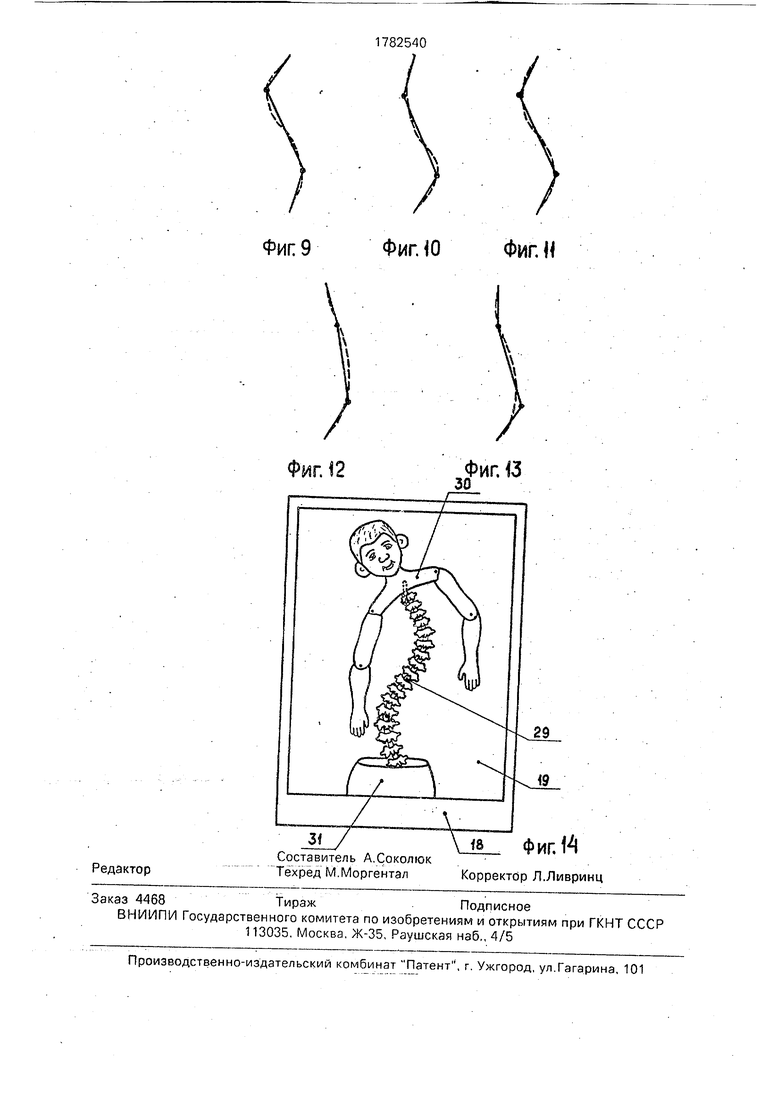
На фиг. 1 показана блок-схема базового варианта устройства, выполненного с использованием средства индикации содержащего один электродвигатель; на фиг. 2 - блок-схема выходного блока управления электродвигателями средства кидика- ции: на фиг. 3 - конструкция одноканально- го средства индикации базового варианта выполнения устройства; на фиг. 4 - блок- схема одноканального блока управления средством индикации по фиг. 3, выполненного на аналоговых элементах; на фиг. 5 - то же, в цифровом исполнении; на фиг. 6 - конструкция двухканального средства индикации; на фиг. 7 - блок-схема двухканаль- ного блока управления средством индикации по фиг. 6, выполненного на аналоговых элементах; на фиг. 8 - то же, но в цифровом исполнении; на фиг. 9-13 - варианты отображения типов сколиоза в двухканальном средстве индикации (соответственно, грудного, поясничного, S -образного, С -образного, грудо-поясничного); на фиг. 14 - вид средства индикации спереди (со стороны пользователя).
Рассмотрим базовый вариант устройства, выполненный на аналоговых элементах, содержащий средство индикации с однока- нальным управлением.
Устройство для лечения нарушений осанки содержит по крайней мере два входных блока 1 и 2, каждый из которых состоит из последовательно соединенных усилителя 3 биопотенциалов с симметричным входом, к которому подключены электроды для съема биопотенциалов (не показаны), выпрямителя 4 и интегратора 5, выход которого являются выходом входных блоков 1 и 2. Количество входных блоков определяется количеством мышц, участвующих в поддержании осанки при данном типе ее нарушения, и должно быть парным (2, 4 и т.п.). При использовании более двух входных блоков 1, 2, они предназначены для регистрации биопотенциалов с групп мышц-синерги- стов, например, длинных мышц спины в грудном и поясничном отделах (4 входных блока) и мышц живота (еще 2 входных блока - итого 6 входных блоков) Выходы нечетных входных блоков 1 и четных входных блоков
2 соединены, соответственно, со взаимно противофазными входами блока 6 вычитания, выполненного в виде многовходового дифференциального сумматора 7, выход ко- 5 торого соединен с первым входом блока 8 управления средством 9 индикации. Со вторым и третьим входами блока 8 управления соединены, соответственно, первый выход блока 10 программирования и выход датчи0 ка 12 положения, установленного в средстве 9 индикации.
В случае выполнения устройства на аналоговых элементах блок 10 программирования и датчик 12 положения выполнены,
5 например, в виде переменных резисторов 11 и 13, крайние выводы которых подключены к шинам плюс и минус питания, а средний вывод является выходом. Выход блока 8 управления нагружен на реверсив0 ный электродвигатель 14, установленный в средстве 9 индикации, вал которого через редуктор 15 кинематически соединен с датчиком 12 его углового положения. Блок 8 управления содержит по крайней мере один
5 канал, содержащий узел 16 компенсации, выполненный в виде трехвходового сумматора, выход которого соединен со входом ключевого усилителя 17 мощности.
Средство 9 индикации выполнено в пря0 моугольном плоском корпусе 18с окном 19, закрытым прозрачным материалом. Параллельно окну 19 в корпусе установлена непрозрачная перегородка 20с отверстием 21 в центре и двумя вертикальными прорезями
5 22. Перпендикулярно перегородке 20 сквозь отверстие 21 выведен вал 24 с возможностью осевого вращения неподвижно, а сквозь прорези 22 - валы 23 и 25, причем средний вал 24 соединен с выходным валом
0 редуктора 15, а верхний и нижний валы 23 и 25 установлены в направляющих 26 с возможностью осевого вращения и линейного перемещения перпендикулярно своих осей. Верхний и нижний валы 23 и 25 снаб5 жены односторонними коромыслами 27, а вал 24 - двойным коромыслом 28. Свободные концы коромысел 27 и 28 шарнирно соединены между собой попарно, причем плечи всех коромысел равны между собой.
0 К концам валов 23-25 в промежутке между окном 19 и перегородкой 20, перпендикулярно их оси, прикреплен пружинистый элемент 29 в средней и крайних точках, несущий макеты позвонков, плечевой пояс
5 30 и тазовый пояс 31 фигуры человека,
В двухканальном варианте исполнения устройства отличия от одноканального (базового) варианта заключаются в конструкции средства 9 индикации, блока 8 управления им и блока 10 программирования. В блоке 9 индикации пружинистый элемент 29 соединен своим верхним и нижним нейтральными участками только с двумя валами 23, 24, выведенными, соответственно, через прорезь 22 с возможностью осевого вращения и линейного перемещения перпендикулярно своей оси, и отверстие 21 в перегородке 20 с возможностью осевого вращения неподвижно. Нижний вал 24 соединен с валом редуктора 15.1 непосредственно, а верхний вал 23 соединен с валом дополнительного редуктора 15.2, кинематически связанного со вторым реверсивным электродвигателем 14.2 и вторым датчиком 12.2 углового положения посредством гибкой пружины 32 типа Баудена. Валы 23 и 24 концентрически расположены внутри полых дополнительных валов, соответственно, 33, 34, и связаны с ними кинематически с возможностью соосного вращения в противоположных направлениях с одинаковым углом поворота К валам 23, 24 жестко прикреплены односторонние коромысла, соответственно, 27 и 35, а к валам 33 и 34 - соответственно, коромысла 36 и 37. Коромысла 27, 37 и 36, 35 связаны попарно жесткими тягами 38, укрепленными шарнирно, и равными суммарной длине обоих коромысел.
Блок 8 управления содержит два канала 39 40, каждый из которых включает последовательно соединенные узел компенсации и ключевой усилитель 17,1 и 17 2 мощности, нагруженный на соответствующий реверсивный электродвигатель 14.1 и 14.2. Узел компенсации каждого из каналов содержит последовательно соединенные первый сумматор-умножитель 41.1, 41.2, второй сумматор 42.1, 42,2, первый вход которого соединен с выходом сумматора-умножителя 41, а выход подключен к ключевому усилителю мощности 17. Первые входы сумматоров-умножителей 41, являющиеся первыми входами каналов 39 40, объединены и соединены с выходом блока 6 вычитания. Вторые входы сумматоров-умножителей 41, являющиеся вторыми входами каналов 39, 40, также объединены и соединены с первым выходом блока 10 программирования, который представляет собой движок переменного резистора 11. Сумматоры-умножители 41.1, 41.2 имеют дополнительный третий вход, являющийся четвертым входом каналов 39, 40, Они объединены и соединены со вторым выходом блока 10 программирования, представленным движком переменного резистора 43, крайние выводы которого соединены с выходами, соответственно, сумматоров-умножителей 42.1 и 42,2. Со вторыми входами вторых сумматоров 42.1 и 42.2, которые являются третьими входами каналов 39, 40, соединены, соответственно, выходы датчиков 12.1 и 12.2 положения.
Электронная часть блока 8 управления
может быть выполнена также на цифровых логических элементах. При этом структура узлов, составляющих блоки и логика их работы аналогичны вышеописанным аналого0 вым вариантам. Различие состоит лишь во введении между выходами входных блоков 1 и 2 и входами блока 6 вычитания, а также выходами датчиков 12 положения и третьими входами блока 8 управления аналого5 цифровых преобразователей (АЦП), управляемых общим генератором тактовых импульсов (не показан) - соответственно, 46.1 и 46.2. Кроме того, усилители мощности 17 содержат цифровые компараторы вхо0 дов, нагруженные на силовые ключи (не показаны), а блок 10 программирования выполнен в виде дискретного переключателя кодов. Преимущество цифрового варианта исполнения устройства заключается в его
5 высокой помехозащищенности и стабильности работы, а также возможности эмулирования схемотехники и логики работы на микро-ЭВМ.
Работа базового варианта устройства
0 осуществляется следующим образом.
В исходном состоянии входы входных блоков 1 и 2 закорочены на нулевую шину и на их выходах, а соответственно, и на выходе блока 6 вычитания сигналы отсутствуют.
5 В связи с этим фаза и величина сигнала на выходе узла 16 компенсации блока 8 управления определяется алгебраической суммой сигналов, поступающих на его второй и третий входы с, соответственно, выхода
0 блока 10 программирования и датчика 12 положения. При неравенстве его нулю (наличии сигнала разбаланса) включается усилитель 17 мощности, подающий напряжение на реверсивный электродвига5 тель 14 в полярности, Вращение его вала через редуктор 15 приводит к изменению угла положения вала 24 и, соответственно, положения датчика 12 положения, до тех пор, пока абсолютное значение сигнала с
0 его выхода не уравняется со значением сигнала на выходе блока 10 программирования, при чем на выходе узла 16 компенсации сигнал принимает нулевое значение и усилитель 17 мощности выключателя. Достиг5 нутое угловое положение вала 23 через коромысла 27 и 28 передается на валы 23 и 25, совместное положение которых разно деформирует пружинистый элемент 29, имитируя деформацию позвоночного столба, соответствующую имеющейся у конкретного больного. Таким образом, регулируя фазу и значение сигнала на выходе бло- ка 10 программирования путем перемещения движка переменного резистора 11,устанавливают исходную величину и сторону деформации макета позвоночного столба.
Обнажают туловище пациента и прикрепляют электроды к коже над проекцией соответствующей мышц, симметрично по- звоночного столба. Выбор мышц и точек крепления над ними электродов определяется особенностями деформации позвоночного столба конкретного пациента. Входы неиспользуемых входных блоков остаются закороченными на нулев ую шину (вследствие чего на последующую работу устройства они не влияют). Электроды соединяют со входами входных блоков 1 и 2 и пациенту предлагают напряжением мышц исправить имеющуюся у него деформацию позвоночного столба. Если амплитуда биопотенциалов с мышц одной стороны туловища превысит амплитуду биопотенциалов контралатеральных мышц, то выходной сиг- нал, например, входного блока 1 превысит выходной сигнал входного блока 2. При использовании более двух входных блоков 1, 2, выходные сигналы нечетных и четных входных блоков (соответственно, 1.1-1.N и 2.1 - 2.N) суммируются, а затем взаимно вычитаются в блоке 6 вычитания, формируя выходной сигнал, по величине и фазе пропорциональный алгебраической сумме входных сигналов. Он поступает на первый вход узла 16 компенсации, вызывая формирование сигнала разбаланса на его выходе, приводящего к включению усилителя мощности и, соответственно, электродвигатель 14. Это ведет к изменению углового положения валов 23-25, и, соответственно, выраженности деформации макета позвоночного столба, с соответствующим изменением сигнала с выхода датчика 12 положения до уравнивания его абсолютного значения с сигналом с выхода блока 6 вычитания, аналогично вышеописанным процессам. Если пациент правильно понял указания и активировал нужные мышцы, исправляющие имеющуюся у него дефор- мацию позвоночного столба (с соответствующей асимметрией амплитуды регистрируемых с них биопотенциалов), то сигнал на выходе блока 6 вычитания принимает фазу, вызывающую уменьшение де- формации макета позвоночного столба, индицируя пациенту о правильном выполнении им указаний. При симметричном активировании мышц либо при неправильном их активировании, положение макета позвоночного столба или не изменится, или деформация увеличится, что индицирует пациенту о неправильности выполнения им указаний.
Таким образом, задачей пациента является путем напряжения мышц туловища выпрямить макет позвоночного столба у фигуры человека в средстве 9 индикации и удержать его в таком положении как можно дольше. Такая задача посильна детям начиная с 5-6-летнего возраста. Индикация формы макета позвоночного столба может быть видимой даже боковым зрением, что позволяет наблюдать одновременно за несколькими соседними средствами 9 индикации, вносит игровой момент в процессе обучения и дух соревновательности.
Базовый вариант устройства лишь отчасти удовлетворяет задачам лечения различных типов сколиоза, т.к. 5 -образная деформация позвоночного столба наблюдается лишь при самых начальных стадиях заболевания, с неустановившимся типом. У подавляющего большинства больных она имеет индивидуальные особенности (тип деформации), для которых предназначен двухканальный вариант исполнения устройства.
Работа блока 8 управления, выполненного на аналоговых элементах и средства 9 индикации двухканального варианта исполнения устройства осуществляется следующим образом. В исходном состоянии устанавливают исходную величину деформации макета позвоночного столба, соответственно имеющейся у конкретного больного, путем регулировки фазы и значения сигнала на первом выходе блока 10 программирования, аналогично базовому варианту. Установка стороны и типа искривления макета позвоночного столба выполняется путем регулировки введенных частей переменного резистора 43, от чего зависит коэффициент усиления сумматоров-умножителей 41.1 и 41.2 (собственно, благодаря этому резистору и задается обратно пропорциональный коэффициент усиления сумматора каждого канала). С учетом коэффициента их усиления, для уравнивания с сигналом, поступающим с первого выхода блока 10 программирования, требуются различные значения сигналов с выходов датчиков 12.1 и 12.2 положения, следовательно, угловое положение валов 23, 33 и 24, 33 также будет различным. Соответственно этому, деформация пружинистого элемента 29 в его верхнем и нижнем участках будет различной (различные по выраженности дуги искривления) с имитацией соответствующего типа деформации позвоночного столба, аналогичного имеющемуся у обучающегося пациента (грудного, поясничного, S -образного, С -образного, гру- до-поясничного) Дальнейшая работа каждого из каналов устройства не отличается от вышеописанного одноканального варианта.
При выполнении устройства на цифровых элементах работа его блоков и узлов отличается тем, что величина и фаза сигналов с выходов входных блоков 1, 2 и датчиков 12 положения представлены цифровым кодом (например, прямым и дополнительным, либо смещенным).
Описанное устройство апробировано в школе-интернате для детей, больных сколиозом. При обучении 48 детей 1 и 2 классов правильная осанка достигнута у 45 из них (94%) за 3-5 сеансов (в течение первого месяца учебного года). У учеников параллельных классов, включающих 44 ребенка, правильная осанка достигнута к концу первого месяца учебного года лишь у 12 (27%) (по критерию Хи-квадрат Р 0,001). Для ее поддержания требовались контрольные сеансы обучения по крайней мере 2 раза в месяц, тогда как у детей первой группы контроль 1 раз в месяц демонстрировал потерю достигнутой осанки, требовавшую их дополнительного доучивания, лишь у 2-5 из них. Наблюдение в течение последующего учебного года показало, что в первой группе к началу следующего учебного года повторное обучение потребовалось у 15 детей (31 %), а во второй -- у 38 (86%) (по критерию Хи-квадрат Р 0,001).
Формула изобретения 1. Устройство для лечения нарушений осанки, содержащее входной блок, выполненный в виде соединенных последовательно усилителя биопотенциалов и выпрямителя, электроды и средство индикации, отличающееся тем, что, с целью увеличения эффективности обучения поддержанию правильной осанки путем повышения наглядности индикации соотношения биоэлектрической активности мышц- антагонистов, в него дополнительно введены п входных блоков, на выходе каждого из которых дополнительно включен интегратор, соединенный с выходом выпрямителя, блок вычитания, с противофазными входами которого соединены выходы входных блоков, задатчик и блок управления средством индикации, содержащий по крайней мере один канал, каждый из которых выполнен в виде последовательно соединенных узла компенсации и ключевого усилителя мощности, нагруженного на
соответствующий реверсивный электродвигатель, кинематически связанный со средством индикации и соответствующим датчиком положения, при этом первый, второй и третий входы узла компенсации каждого канала блока управления соединены с выходами соответственно блока вычитания, задатчика и датчика положения, а средство индикации выполнено в виде модели гибко0 го позвоночного столба в виде пружинистого элемента с укрепленными на нем позвонками, плечевым и тазовым поясами, нейтральные участки пружинистого элемента прикреплены к перпендикулярным ему
5 валам, связанным коромыслами, по крайней мере один из которых соединен с выходом редуктора с электродвигателем и установлен с возможностью осевого вращения неподвижно, а остальные валы разме0 щены в направляющих с возможностью осевого вращения и линейного перемещения перпендикулярно своим осям.
2.Устройство поп. 1,отличающее- с я тем, что в средстве индикации к валам
5 прикреплены средний и крайние нейтральные участки пружинистого элемента, при этом средний вал установлен неподвижно, а два крайних размещены в направляющих, причем блок управления содержит один ка0 нал, узел компенсации которого выполнен в виде двух последовательно соединенных сумматоров, первый и второй входы первого из которых являются соответственно первым и вторым входами канала, а выход сое5 динен с первым входом второго сумматора, второй вход которого является третьим входом канала.
3.Устройство по п. 1,отличающее- с я тем, что, с целью обеспечения индика0 ции коррекции позвоночного столба соответственно особенностям его деформации, в системе индикации к валам прикреплены верхний и нижний нейтральные участки пружинистого элемента, оба вала соединены
5 через редукторы с соответствующими электродвигателями, а их коромысла связаны посредством жесткой тяги, равной суммарной длине обоих коромысел, причем нижний вал установлен неподвижно, а верхний
0 вал размещен в направляющих, при этом блок управления содержит два канала, нагруженных соответственно на первый и второй электродвигатели, первые и вторые входы которых объединены, а узлы компен5 сации выполнены в виде суммирующих умножителей, первый и второй суммирующие входы которых являются соответственно первым и вторым входами каждого из каналов, а третьи умножающие входы являются четвертыми входами каждого из каналов и
соединены соответственно с вторым и третьим выходами задатчика и двухвходо- вых сумматоров, первые входы которых соединены с выходами суммирующих умножителей своего канала, а вторые входы являются третьими входами каждого из каналов.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптического определения микроколичеств веществ | 1982 |
|
SU1081429A1 |
| Устройство для тренировки и обучения ритмоатлетическим упражнениям | 1986 |
|
SU1347950A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЭЛЕКТРОДУГОВОЙ СВАРКЕ | 2011 |
|
RU2447515C1 |
| Многоточечный цифровой термометр | 1987 |
|
SU1464048A1 |
| Устройство для управления биоэлектрическим протезом плеча | 1985 |
|
SU1344351A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ | 1991 |
|
RU2019049C1 |
| Устройство для исследования органа слуха | 1981 |
|
SU995740A1 |

Использование: лечение нарушений осанки. Относится к ортопедии и может быть использовано при консервативном лечении нарушений осанки и сколиоза у детей. Цель - повышение эффективности лечения. Сущность изобретения: устройство содержит входной блок в виде электродов, усилитель биопотенциалов и выпрямителя, а также средство индикации. В устройство введен дополнительный входной блок, блок вычитания, задатчик 10 и блок управления средством индикации, выполненный в виде фигуры человека с позвоночным столбом, образованным пружинистым элементом, связанным с приводными средствами, 2 з.п ф-лы, 14 ил.
г I I I
Т
г
w
шпиу)
w
w
I
ФС±1
и
HS
ХГ
.)
ObS28iL
ВХОД
Фиг, 7
SM
т
39
JH
д
1
ю
ж
1У
40
SM
1W
Л.-..-., „g.
Фип8
1782540
Jp
п#
SM
to
т
ВЫХ.4
I
O.CJ
е- - -. -
LF
SM 49.2
ВЫХ.2
р
ш
о. с. 2
«еФиг 9
Фиг. 2
Редактор
Составитель А Соколкж Техред М Моргентал
Фиг Ю
Фиг. М
Фиг. 3 зо
Фиг.М
Корректор Л.Ливринц
| Патент США № 4170225, кл | |||
| Штамподержатель для ковочных штампов | 1957 |
|
SU128733A1 |
